- Метод конечных элементов

Содержание
- 2. Стр. Основная концепция метода перемещений 6 Интерпретация матрицы жесткости элементов [ke] 8 Моделирование непрерывной конструкции конечными
- 3. Введение в теорию конечных элементов (продолжение) Стр. Некоторые советы по моделированию 54 Единицы измерения 56 Обзор
- 4. Введение в теорию конечных элементов (продолжение) Стр. Описание оператора PBARL 83 Силы в балочном элементе 89
- 5. Основная концепция метода перемещений Большинство конечноэлементных систем основываются на методе перемещений Каждый элемент модели может быть
- 6. Основная концепция метода перемещений (продолжение) где { P } - известные силы, прикладываемые к модели [
- 7. Интерпретация матрицы жесткости элемента [k]e [k]e описывает как сила передается через элемент Для упругих задач, закон
- 8. Интерпретация матрицы жесткости элемента [k]e (продолжение) Это естественно, поскольку для перемещения конца пружины 1 на заданное
- 9. Моделирование непрерывной конструкции конечными элементами Анализ сложных инженерных задач может быть затруднен (или даже невозможен) без
- 10. Моделирование непрерывной конструкции конечными элементами (продолжение) Каждая узловая точка имеет шесть независимых степеней свободы (DOFs). Степени
- 11. Рисунок 2-1 "Перемещение” (displacement) - основной термин означающий компонент перемещения или угла поворота. Моделирование непрерывной конструкции
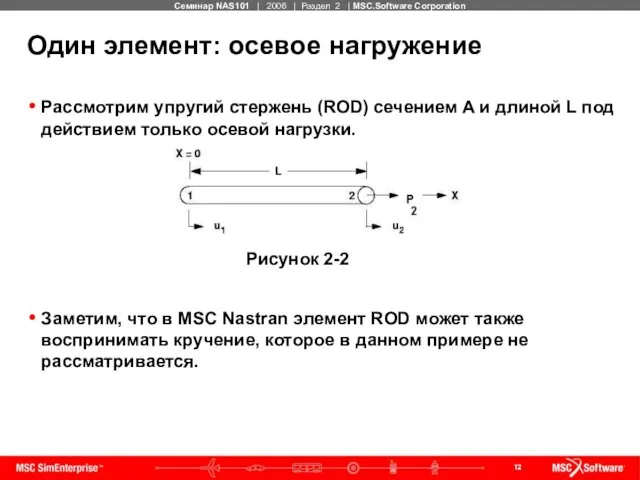
- 12. Один элемент: осевое нагружение Рассмотрим упругий стержень (ROD) сечением A и длиной L под действием только
- 13. Один элемент: осевое нагружение (продолжение) Для этого ROD элемента, выражение (2-1) может быть представлено как: {
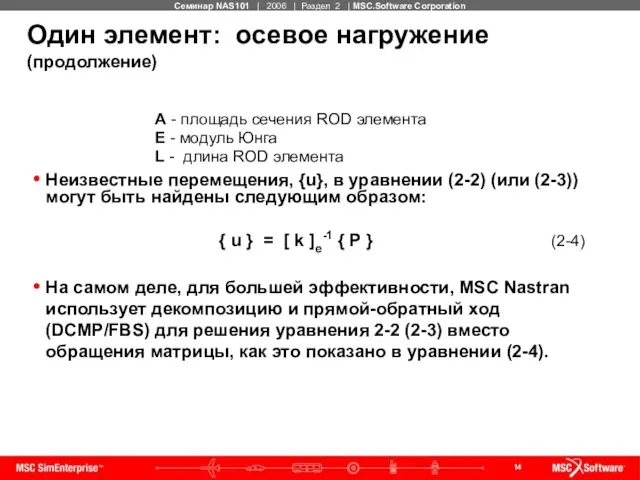
- 14. Один элемент: осевое нагружение (продолжение) A - площадь сечения ROD элемента E - модуль Юнга L
- 15. Один элемент: осевое нагружение (продолжение) Для простоты объяснения в этом семинаре мы будем ссылаться на уравнение
- 16. Один элемент: осевое нагружение (продолжение) Чтобы проиллюстрировать это, распишем уравнение (2-3) следующим образом: P1 = (AE/L)*u1
- 17. Один элемент: осевое нагружение (продолжение) Вернемся к рисунку с ROD элементом и закрепим его левый узел:
- 18. Один элемент: осевое нагружение (продолжение) После закрепления ROD элемента, уравнение (2-6) может быть решено { u
- 19. Общие требования к исходным данным Какие требования существуют для выполнения конечноэлементного анализа? Геометрия Расположение узловых точек
- 20. Общие требования к исходным данным (продолжение) Свойства материала Какой тип материала использовать: алюминий, сталь, графит, эпоксидная
- 21. Общие требования к исходным данным (продолжение) Нагрузки Приложенные нагрузки Принудительные перемещения Температурные нагрузки Нагрузки могут прикладываться
- 22. Исходные данные для примера с ROD элементом Какие общие требования существуют для расчета в системе MSC
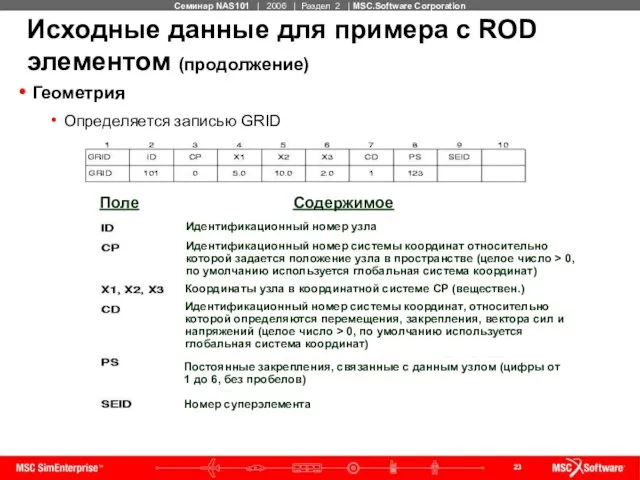
- 23. Исходные данные для примера с ROD элементом (продолжение) Геометрия Определяется записью GRID
- 24. Исходные данные для примера с ROD элементом (продолжение) Какие общие требования существуют для расчета в системе
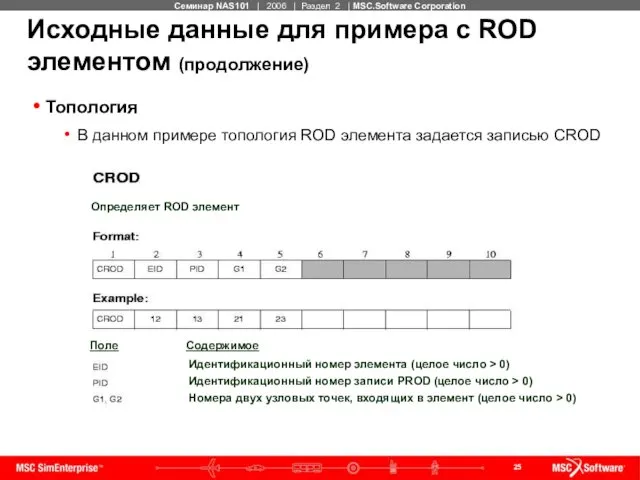
- 25. Исходные данные для примера с ROD элементом (продолжение) Топология В данном примере топология ROD элемента задается
- 26. Исходные данные для примера с ROD элементом (продолжение) Какие общие требования существуют для расчета в системе
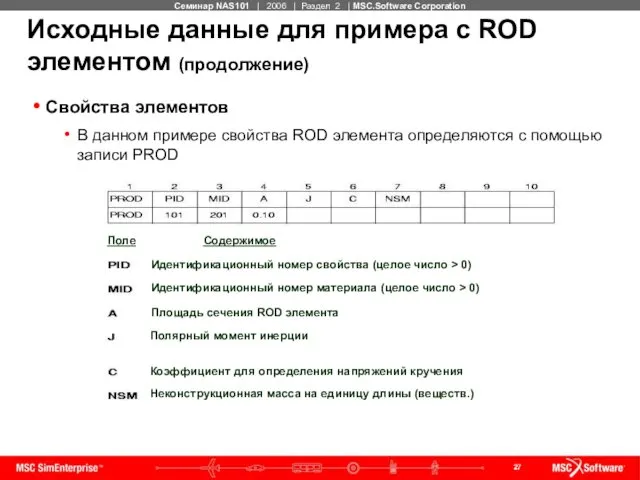
- 27. Исходные данные для примера с ROD элементом (продолжение) Свойства элементов В данном примере свойства ROD элемента
- 28. Исходные данные для примера с ROD элементом (продолжение) Какие общие требования существуют для расчета в системе
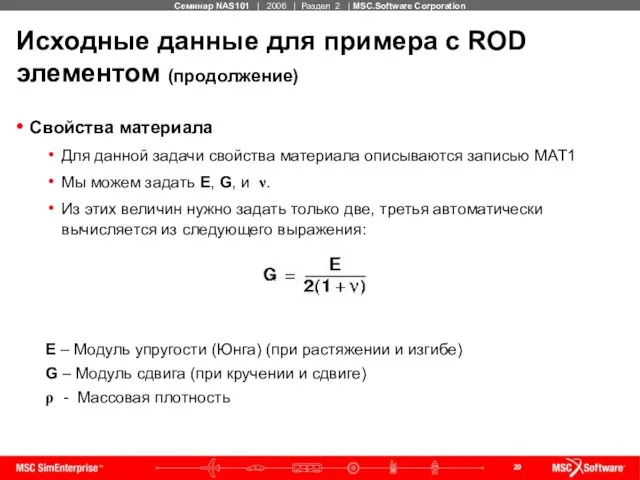
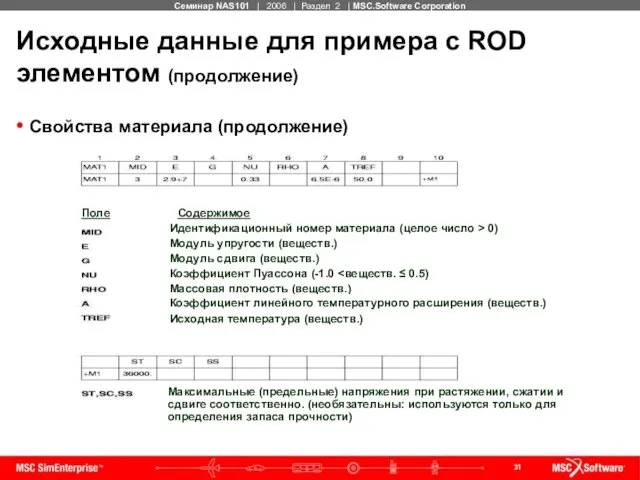
- 29. Исходные данные для примера с ROD элементом (продолжение) Свойства материала Для данной задачи свойства материала описываются
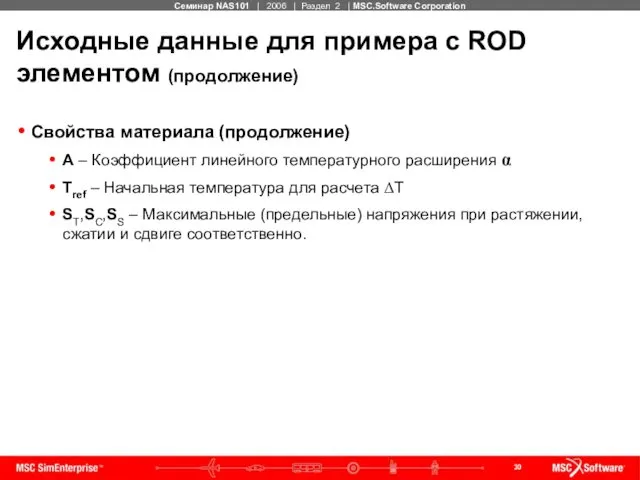
- 30. Исходные данные для примера с ROD элементом (продолжение) Свойства материала (продолжение) A – Коэффициент линейного температурного
- 31. Исходные данные для примера с ROD элементом (продолжение) Свойства материала (продолжение)
- 32. Исходные данные для примера с ROD элементом (продолжение) Какие общие требования существуют для расчета в системе
- 33. Исходные данные для примера с ROD элементом (продолжение) В MSC Nastran граничные условия могут определяться с
- 34. Исходные данные для примера с ROD элементом (продолжение) Какие общие требования существуют для расчета в системе
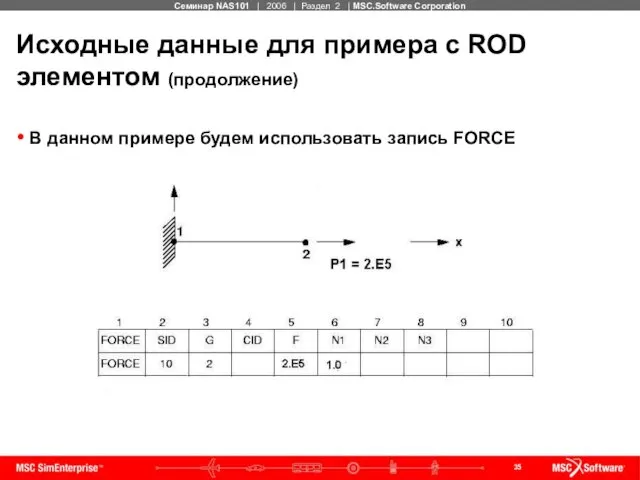
- 35. Исходные данные для примера с ROD элементом (продолжение) В данном примере будем использовать запись FORCE
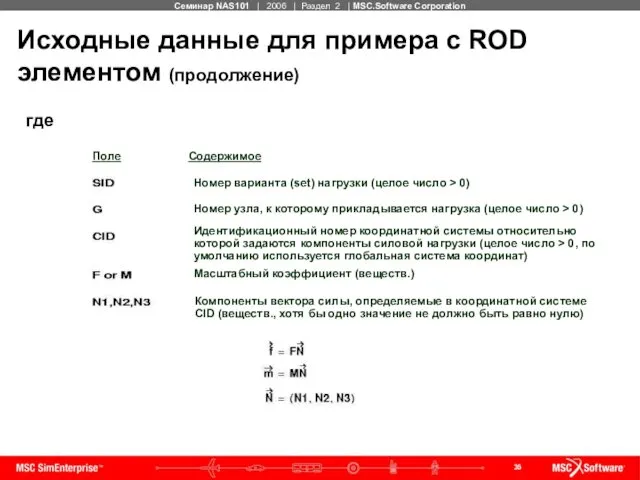
- 36. Исходные данные для примера с ROD элементом (продолжение) где
- 37. Исходные данные для примера с ROD элементом (продолжение) Для данного примера, Свойства элемента (A = 5.0)
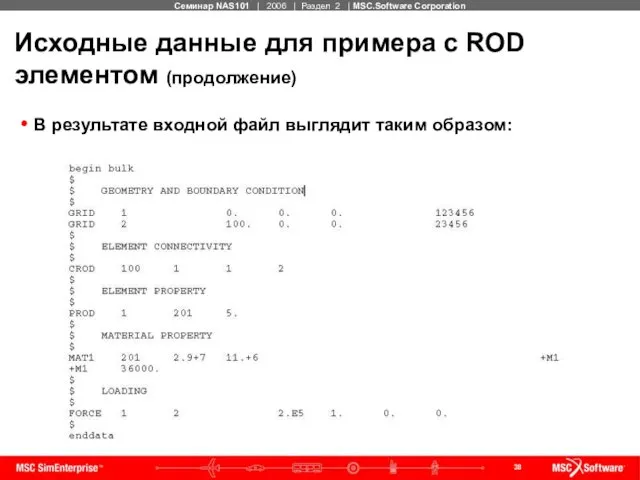
- 38. Исходные данные для примера с ROD элементом (продолжение) В результате входной файл выглядит таким образом:
- 39. Исходные данные для примера с ROD элементом (продолжение) Какие общие требования существуют для расчета в системе
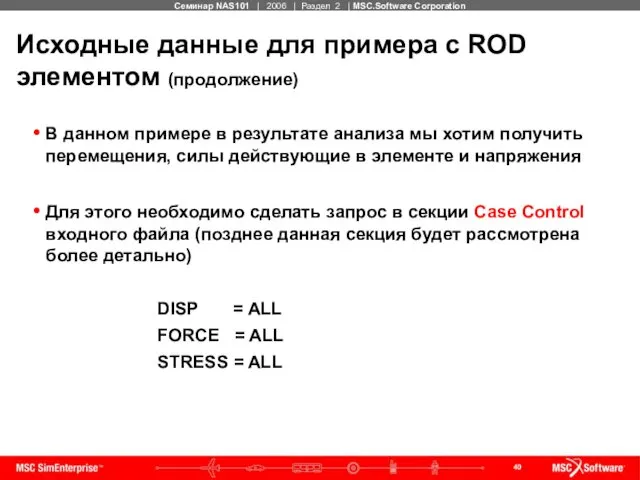
- 40. Исходные данные для примера с ROD элементом (продолжение) В данном примере в результате анализа мы хотим
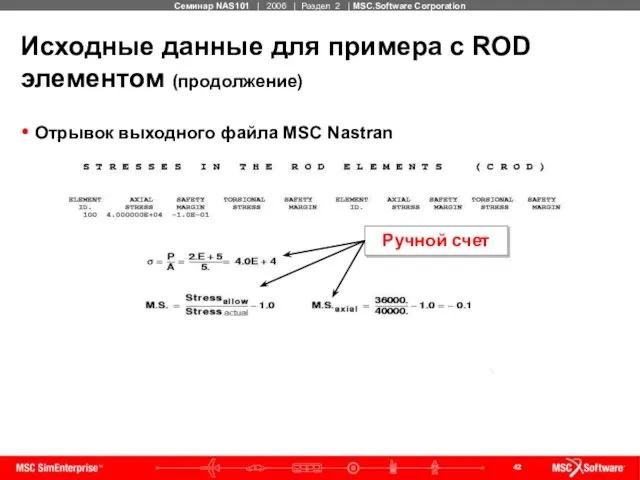
- 41. Исходные данные для примера с ROD элементом (продолжение) Отрывок выходного файла MSC Nastran: Hand Calculation Ручной
- 42. Исходные данные для примера с ROD элементом (продолжение) Отрывок выходного файла MSC Nastran HAND CALCULATION Ручной
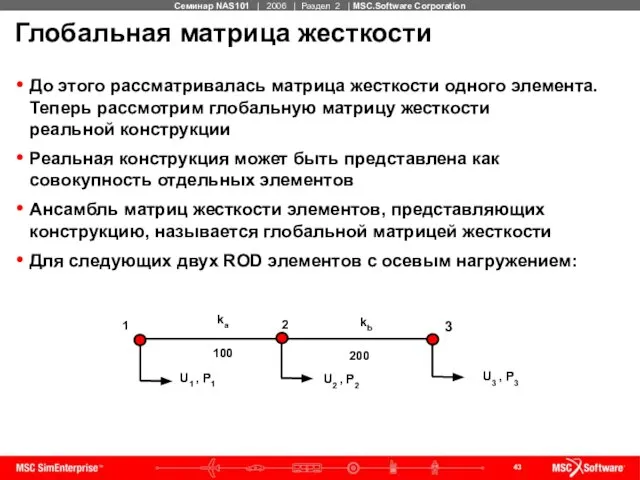
- 43. Глобальная матрица жесткости До этого рассматривалась матрица жесткости одного элемента. Теперь рассмотрим глобальную матрицу жесткости реальной
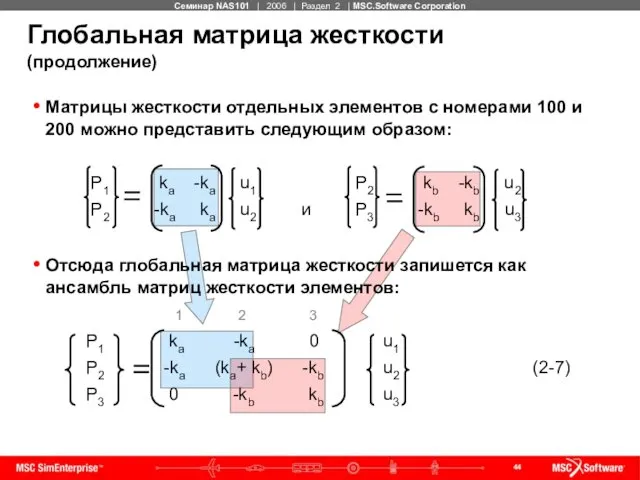
- 44. Глобальная матрица жесткости (продолжение) Матрицы жесткости отдельных элементов с номерами 100 и 200 можно представить следующим
- 45. Глобальная матрица жесткости (продолжение) Глобальная матрица жесткости определяется суперпозицией матриц жесткости отдельных элементов Прямое определение матрицы
- 46. Собрав глобальную матрицу жесткости так, как показано в уравнении (2-7), можно затем решить это уравнение с
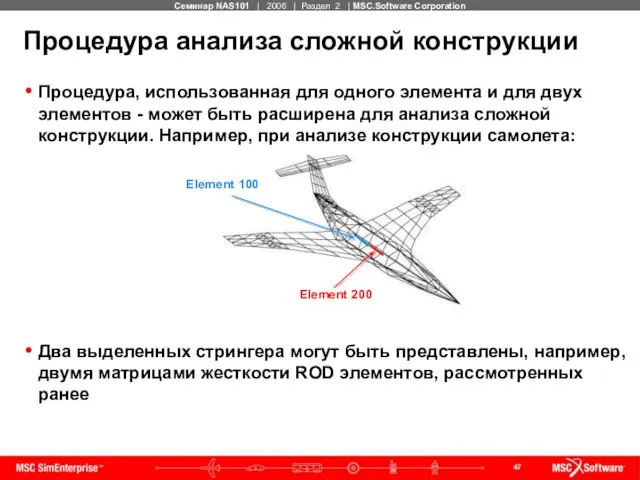
- 47. Процедура анализа сложной конструкции Процедура, использованная для одного элемента и для двух элементов - может быть
- 48. Процедура анализа сложной конструкции (продолжение) Глобальная матрица жесткости размерностью N x N ka -ka 0 -ka
- 49. Процедура анализа сложной конструкции (продолжение) Жесткостные характеристики остальной части самолета находятся составлением ансамбля из отдельных жесткостей
- 50. Процедура анализа сложной конструкции (продолжение) Ресурсы компьютера (время работы центрального процессора), используемые MSC Nastran (при размерности
- 51. Выходные данные MSC Nastran При запуске MSC Nastran Вы можете запросить любую рассчитываемую величину. Вот некоторые
- 52. Проверка модели Пользователь должен проверить точность результатов, полученных в результате анализа Некоторые виды проверки выполняются так:
- 53. Некоторые советы по моделированию Прежде чем начать моделирование необходимо иметь инженерное представление о поведении конструкции Определите
- 54. Некоторые советы по моделированию (продолжение) Используйте небольшие простые тестовые модели для проверки незнакомых методов и технологий
- 55. Единицы измерения Пример Исходные данные Система единиц Английская Метрическая Геометрия Модуль упругости Прикладываемые моменты Прикладываемые силы
- 56. Единицы измерения (продолжение) F = Ma: масса (М) = вес / g Примечание: Для динамического анализа
- 57. Обзор процедуры решения методом конечных элементов
- 58. Литература по матричному анализу
- 59. Литература по МКЭ
- 60. Матрица жесткости балочного (BAR) элемента Рассмотрим матрицу жесткости BAR элемента. В качестве иллюстрации рассмотрим нагружение перерезывающей
- 61. Матрица жесткости балочного (BAR) элемента (продолжение) Матрица жесткости для BAR элемента для двухмерной модели, включающей только
- 62. Элемент CBAR Соединяет две узловые точки. Формулировки получены из классической балочной теории (плоские сечения остаются плоскими
- 63. Элемент CBAR (продолжение) Компоненты перемещения ui θi Нейтральная ось может иметь отступ относительно узловых точек (создается
- 64. Элемент CBAR (продолжение) Принципиальные ограничения (продолжение) Центр сдвига и нейтральная ось должны совпадать (поэтому не рекомендуется
- 65. Описание CBAR элемента Топология CBAR элемента
- 66. Описание CBAR элемента
- 67. Описание CBAR элемента Вектор ориентации “V” задается через координатные системы Глобальную (перемещения) Базовую Векторы смещений “WA”
- 68. Описание CBAR элемента Вектор ориентации По умолчанию используется глобальная (перемещения) система координат (поле CD) Можно использовать
- 69. Описание CBAR элемента По умолчанию
- 70. Описание CBAR элемента (с версии 2005) По умолчанию
- 71. Описание CBAR элемента (продолжение) Система координат CBAR элемента
- 72. Описание CBAR элемента (продолжение)
- 73. Описание CBAR элемента (продолжение) Далее следуют два примера в которых, задается вектор ориентации системы координат элемента
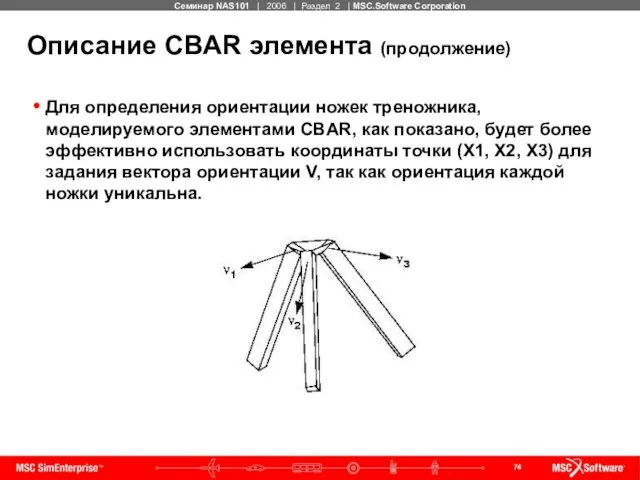
- 74. Описание CBAR элемента (продолжение) Для определения ориентации ножек треножника, моделируемого элементами CBAR, как показано, будет более
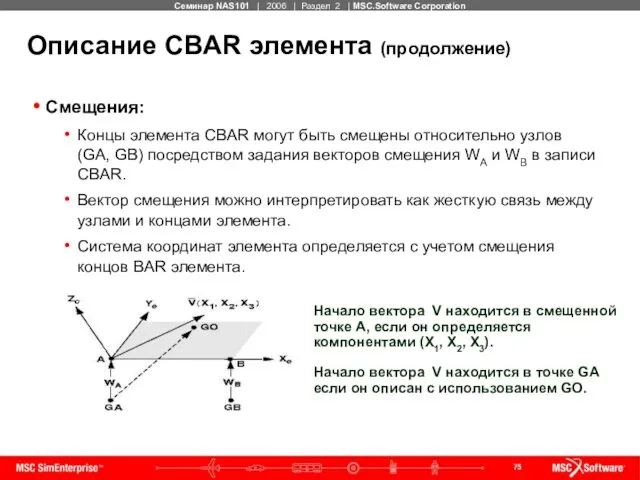
- 75. Описание CBAR элемента (продолжение) Смещения: Концы элемента CBAR могут быть смещены относительно узлов (GA, GB) посредством
- 76. Описание CBAR элемента (продолжение) Флаги шарниров: Пользователь указывает степени свободы на каждом из концов BAR элемента
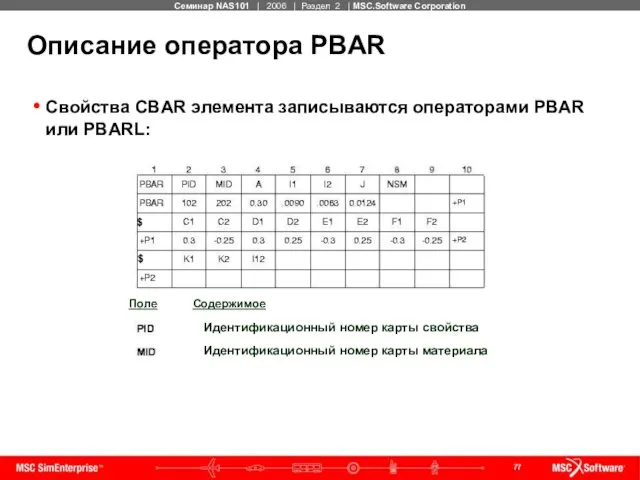
- 77. Описание оператора PBAR Свойства CBAR элемента записываются операторами PBAR или PBARL:
- 78. Описание оператора PBAR (продолжение)
- 79. Расчет моментов инерции J для некоторых сечений
- 80. Расчет моментов инерции J для некоторых сечений (продолжение)
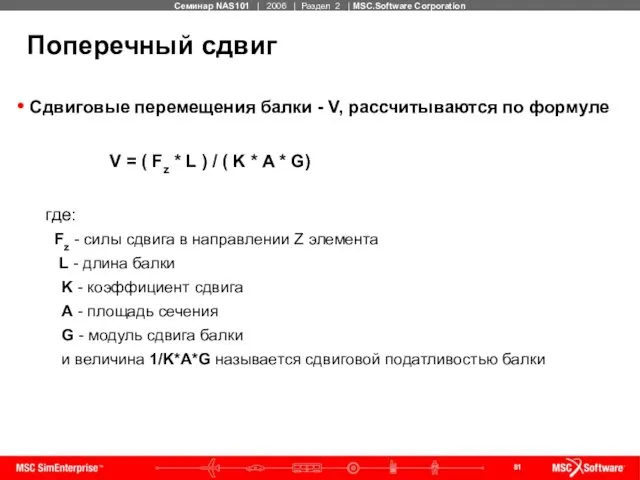
- 81. Поперечный сдвиг Сдвиговые перемещения балки - V, рассчитываются по формуле V = ( Fz * L
- 82. Поперечный сдвиг (продолжение) K определяет распределение сдвига по сечению элемента и ее величина зависит от формы
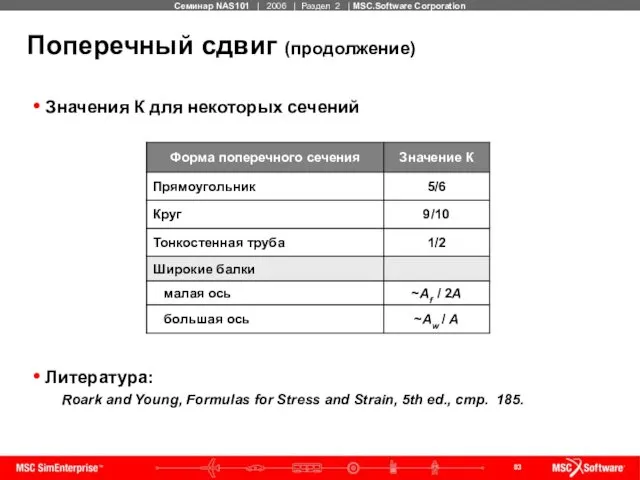
- 83. Поперечный сдвиг (продолжение) Значения К для некоторых сечений Литература: Roark and Young, Formulas for Stress and
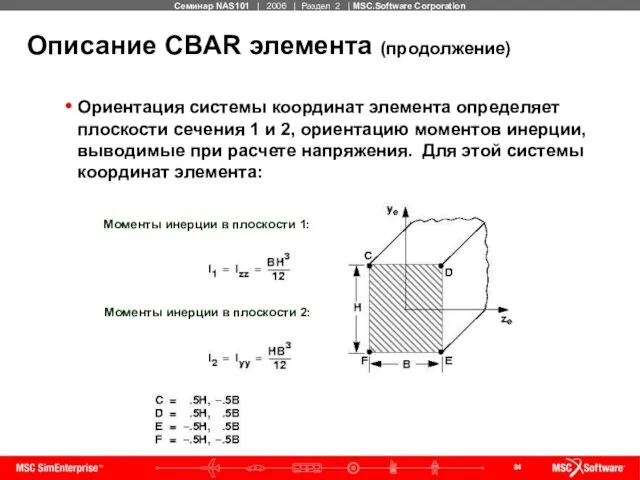
- 84. Описание CBAR элемента (продолжение) Ориентация системы координат элемента определяет плоскости сечения 1 и 2, ориентацию моментов
- 85. Описание CBAR элемента (продолжение) Для такой системы координат элемента:
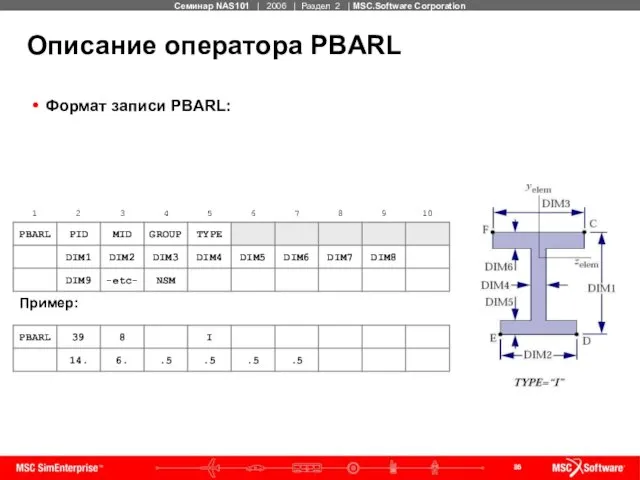
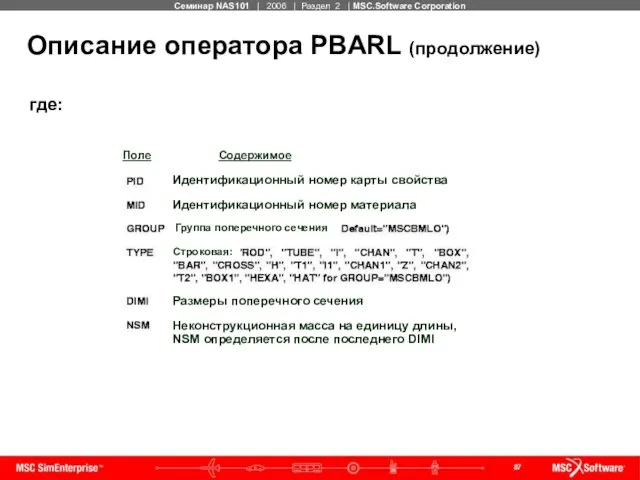
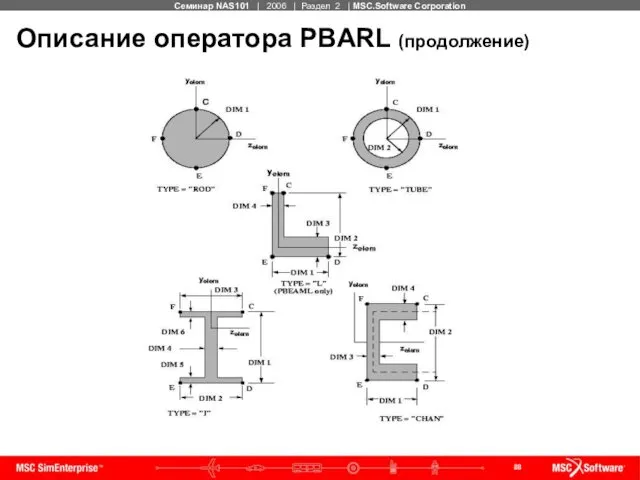
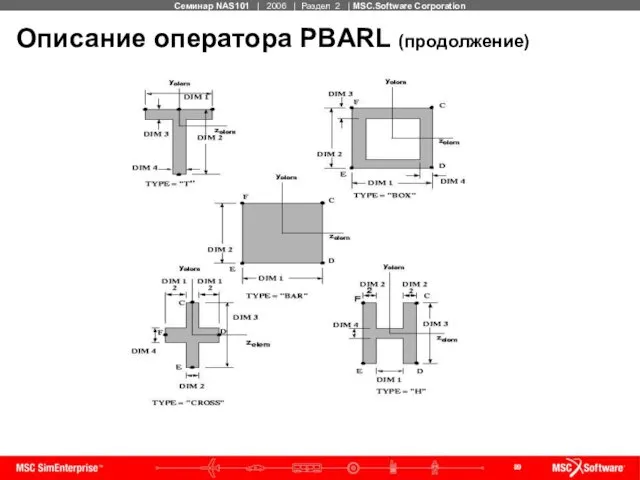
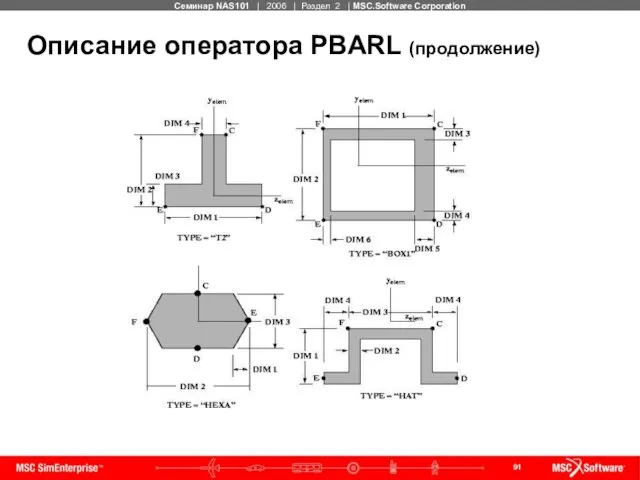
- 86. Описание оператора PBARL Формат записи PBARL:
- 87. Описание оператора PBARL (продолжение) где:
- 88. Описание оператора PBARL (продолжение)
- 89. Описание оператора PBARL (продолжение)
- 90. Описание оператора PBARL (продолжение)
- 91. Описание оператора PBARL (продолжение)
- 92. Силы в балочном элементе Внутренние силы и моменты элемента BAR:
- 93. Силы в балочном элементе (продолжение) Это можно также представить как:
- 94. Пример применения CBAR элемента
- 95. Пример применения CBAR элемента (продолжение) Свойства
- 96. Входной файл MSC Nastran для данного примера
- 97. Вывод перемещений для данного примера
- 98. Вывод сил в элементе для данного примера Сдвиг Момент
- 100. Скачать презентацию
![Стр. Основная концепция метода перемещений 6 Интерпретация матрицы жесткости элементов [ke]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/484771/slide-1.jpg)
Стр.
Основная концепция метода перемещений 6
Интерпретация матрицы жесткости элементов [ke] 8
Моделирование
Стр.
Основная концепция метода перемещений 6
Интерпретация матрицы жесткости элементов [ke] 8
Моделирование
Введение в теорию конечных элементов (продолжение)
Стр.
Некоторые советы по моделированию 54
Единицы
Введение в теорию конечных элементов (продолжение)
Стр.
Некоторые советы по моделированию 54
Единицы

Введение в теорию конечных элементов (продолжение)
Стр.
Описание оператора PBARL 83
Силы в
Введение в теорию конечных элементов (продолжение)
Стр.
Описание оператора PBARL 83
Силы в
Основная концепция метода перемещений
Большинство конечноэлементных систем основываются на методе перемещений
Каждый элемент
Основная концепция метода перемещений
Большинство конечноэлементных систем основываются на методе перемещений
Каждый элемент
Основная концепция метода перемещений (продолжение)
где { P } - известные силы,
Основная концепция метода перемещений (продолжение)
где { P } - известные силы,
![Интерпретация матрицы жесткости элемента [k]e [k]e описывает как сила передается через](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/484771/slide-6.jpg)
Интерпретация матрицы жесткости элемента [k]e
[k]e описывает как сила передается через
Интерпретация матрицы жесткости элемента [k]e
[k]e описывает как сила передается через
![Интерпретация матрицы жесткости элемента [k]e (продолжение) Это естественно, поскольку для перемещения](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/484771/slide-7.jpg)
Интерпретация матрицы жесткости элемента [k]e (продолжение)
Это естественно, поскольку для перемещения конца
Интерпретация матрицы жесткости элемента [k]e (продолжение)
Это естественно, поскольку для перемещения конца
Моделирование непрерывной конструкции конечными элементами
Анализ сложных инженерных задач может быть
Моделирование непрерывной конструкции конечными элементами
Анализ сложных инженерных задач может быть
Моделирование непрерывной конструкции конечными элементами (продолжение)
Каждая узловая точка имеет шесть независимых
Моделирование непрерывной конструкции конечными элементами (продолжение)
Каждая узловая точка имеет шесть независимых
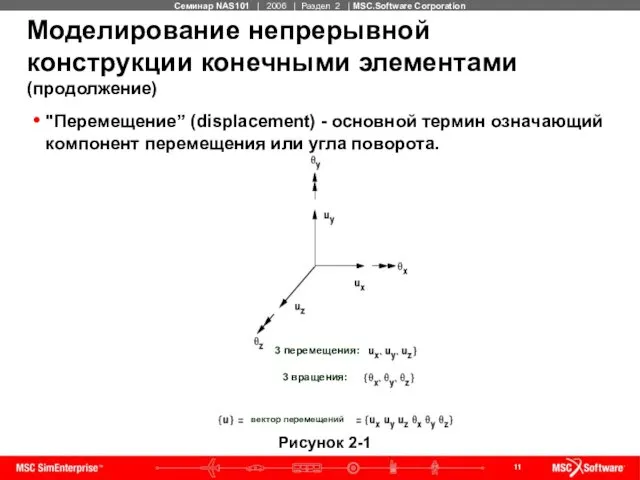
Рисунок 2-1
"Перемещение” (displacement) - основной термин означающий компонент перемещения или угла
Рисунок 2-1
"Перемещение” (displacement) - основной термин означающий компонент перемещения или угла
Один элемент: осевое нагружение
Рассмотрим упругий стержень (ROD) сечением A и длиной
Один элемент: осевое нагружение
Рассмотрим упругий стержень (ROD) сечением A и длиной

Один элемент: осевое нагружение
(продолжение)
Для этого ROD элемента, выражение (2-1) может
Один элемент: осевое нагружение
(продолжение)
Для этого ROD элемента, выражение (2-1) может
Один элемент: осевое нагружение
(продолжение)
A - площадь сечения ROD элемента
Один элемент: осевое нагружение
(продолжение)
A - площадь сечения ROD элемента
Один элемент: осевое нагружение
(продолжение)
Для простоты объяснения в этом семинаре мы
Один элемент: осевое нагружение
(продолжение)
Для простоты объяснения в этом семинаре мы
Один элемент: осевое нагружение
(продолжение)
Чтобы проиллюстрировать это, распишем уравнение (2-3) следующим
Один элемент: осевое нагружение
(продолжение)
Чтобы проиллюстрировать это, распишем уравнение (2-3) следующим
Один элемент: осевое нагружение
(продолжение)
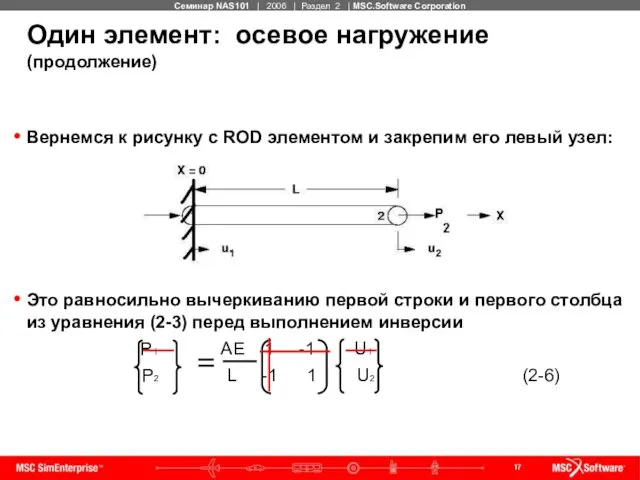
Вернемся к рисунку с ROD элементом и
Один элемент: осевое нагружение
(продолжение)
Вернемся к рисунку с ROD элементом и
Один элемент: осевое нагружение
(продолжение)
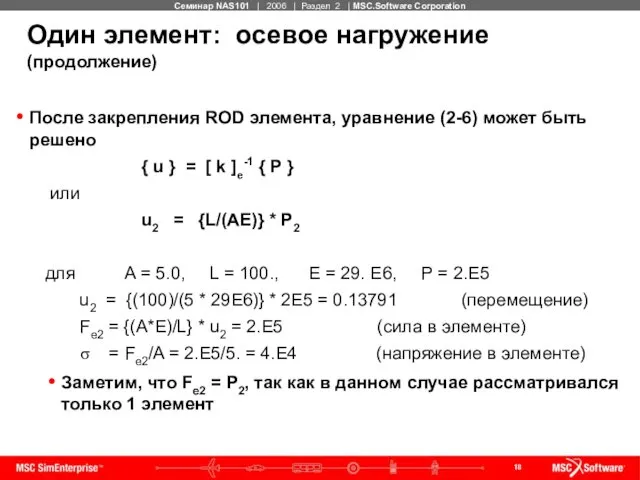
После закрепления ROD элемента, уравнение (2-6) может
Один элемент: осевое нагружение
(продолжение)
После закрепления ROD элемента, уравнение (2-6) может
Общие требования к исходным данным
Какие требования существуют для выполнения конечноэлементного анализа?
Геометрия
Расположение
Общие требования к исходным данным
Какие требования существуют для выполнения конечноэлементного анализа?
Геометрия
Расположение
Общие требования к исходным данным (продолжение)
Свойства материала
Какой тип материала использовать:
Общие требования к исходным данным (продолжение)
Свойства материала
Какой тип материала использовать:
Общие требования к исходным данным (продолжение)
Нагрузки
Приложенные нагрузки
Принудительные перемещения
Температурные нагрузки
Нагрузки могут прикладываться
Общие требования к исходным данным (продолжение)
Нагрузки
Приложенные нагрузки
Принудительные перемещения
Температурные нагрузки
Нагрузки могут прикладываться
Исходные данные для примера с ROD элементом
Какие общие требования существуют для
Исходные данные для примера с ROD элементом
Какие общие требования существуют для
Исходные данные для примера с ROD элементом (продолжение)
Геометрия
Определяется записью GRID
Исходные данные для примера с ROD элементом (продолжение)
Геометрия
Определяется записью GRID
Исходные данные для примера с ROD элементом (продолжение)
Какие общие требования существуют
Исходные данные для примера с ROD элементом (продолжение)
Какие общие требования существуют
Исходные данные для примера с ROD элементом (продолжение)
Топология
В данном примере топология
Исходные данные для примера с ROD элементом (продолжение)
Топология
В данном примере топология
Исходные данные для примера с ROD элементом (продолжение)
Какие общие требования существуют
Исходные данные для примера с ROD элементом (продолжение)
Какие общие требования существуют
Исходные данные для примера с ROD элементом (продолжение)
Свойства элементов
В данном примере
Исходные данные для примера с ROD элементом (продолжение)
Свойства элементов
В данном примере
Исходные данные для примера с ROD элементом (продолжение)
Какие общие требования существуют
Исходные данные для примера с ROD элементом (продолжение)
Какие общие требования существуют
Исходные данные для примера с ROD элементом (продолжение)
Свойства материала
Для данной задачи
Исходные данные для примера с ROD элементом (продолжение)
Свойства материала
Для данной задачи
Исходные данные для примера с ROD элементом (продолжение)
Свойства материала (продолжение)
A –
Исходные данные для примера с ROD элементом (продолжение)
Свойства материала (продолжение)
A –
Исходные данные для примера с ROD элементом (продолжение)
Свойства материала (продолжение)
Исходные данные для примера с ROD элементом (продолжение)
Свойства материала (продолжение)
Исходные данные для примера с ROD элементом (продолжение)
Какие общие требования существуют
Исходные данные для примера с ROD элементом (продолжение)
Какие общие требования существуют
Исходные данные для примера с ROD элементом (продолжение)
В MSC Nastran граничные
Исходные данные для примера с ROD элементом (продолжение)
В MSC Nastran граничные

Исходные данные для примера с ROD элементом (продолжение)
Какие общие требования существуют
Исходные данные для примера с ROD элементом (продолжение)
Какие общие требования существуют
Исходные данные для примера с ROD элементом (продолжение)
В данном примере будем
Исходные данные для примера с ROD элементом (продолжение)
В данном примере будем
Исходные данные для примера с ROD элементом (продолжение)
где
Исходные данные для примера с ROD элементом (продолжение)
где
Исходные данные для примера с ROD элементом (продолжение)
Для данного примера,
Свойства элемента
Исходные данные для примера с ROD элементом (продолжение)
Для данного примера,
Свойства элемента
Исходные данные для примера с ROD элементом (продолжение)
В результате входной файл
Исходные данные для примера с ROD элементом (продолжение)
В результате входной файл
Исходные данные для примера с ROD элементом (продолжение)
Какие общие требования существуют
Исходные данные для примера с ROD элементом (продолжение)
Какие общие требования существуют
Исходные данные для примера с ROD элементом (продолжение)
В данном примере в
Исходные данные для примера с ROD элементом (продолжение)
В данном примере в

Исходные данные для примера с ROD элементом (продолжение)
Отрывок выходного файла MSC
Исходные данные для примера с ROD элементом (продолжение)
Отрывок выходного файла MSC
Исходные данные для примера с ROD элементом (продолжение)
Отрывок выходного файла MSC
Исходные данные для примера с ROD элементом (продолжение)
Отрывок выходного файла MSC
Глобальная матрица жесткости
До этого рассматривалась матрица жесткости одного элемента. Теперь рассмотрим
Глобальная матрица жесткости
До этого рассматривалась матрица жесткости одного элемента. Теперь рассмотрим
Глобальная матрица жесткости
(продолжение)
Матрицы жесткости отдельных элементов с номерами 100 и 200
Глобальная матрица жесткости
(продолжение)
Матрицы жесткости отдельных элементов с номерами 100 и 200

Глобальная матрица жесткости
(продолжение)
Глобальная матрица жесткости определяется суперпозицией матриц жесткости отдельных элементов
Прямое
Глобальная матрица жесткости
(продолжение)
Глобальная матрица жесткости определяется суперпозицией матриц жесткости отдельных элементов
Прямое
Собрав глобальную матрицу жесткости так, как показано в уравнении (2-7), можно
Собрав глобальную матрицу жесткости так, как показано в уравнении (2-7), можно
Процедура анализа сложной конструкции
Процедура, использованная для одного элемента и для двух
Процедура анализа сложной конструкции
Процедура, использованная для одного элемента и для двух

Процедура анализа сложной конструкции (продолжение)
Глобальная матрица жесткости размерностью N x N
ka
Процедура анализа сложной конструкции (продолжение)
Глобальная матрица жесткости размерностью N x N
ka
Процедура анализа сложной конструкции (продолжение)
Жесткостные характеристики остальной части самолета находятся составлением
Процедура анализа сложной конструкции (продолжение)
Жесткостные характеристики остальной части самолета находятся составлением
Процедура анализа сложной конструкции (продолжение)
Ресурсы компьютера (время работы центрального процессора), используемые
Процедура анализа сложной конструкции (продолжение)
Ресурсы компьютера (время работы центрального процессора), используемые
Выходные данные MSC Nastran
При запуске MSC Nastran Вы можете запросить любую
Выходные данные MSC Nastran
При запуске MSC Nastran Вы можете запросить любую
Проверка модели
Пользователь должен проверить точность результатов, полученных в результате анализа
Некоторые виды
Проверка модели
Пользователь должен проверить точность результатов, полученных в результате анализа
Некоторые виды
Некоторые советы по моделированию
Прежде чем начать моделирование необходимо иметь инженерное представление
Некоторые советы по моделированию
Прежде чем начать моделирование необходимо иметь инженерное представление
Некоторые советы по моделированию (продолжение)
Используйте небольшие простые тестовые модели для проверки
Некоторые советы по моделированию (продолжение)
Используйте небольшие простые тестовые модели для проверки
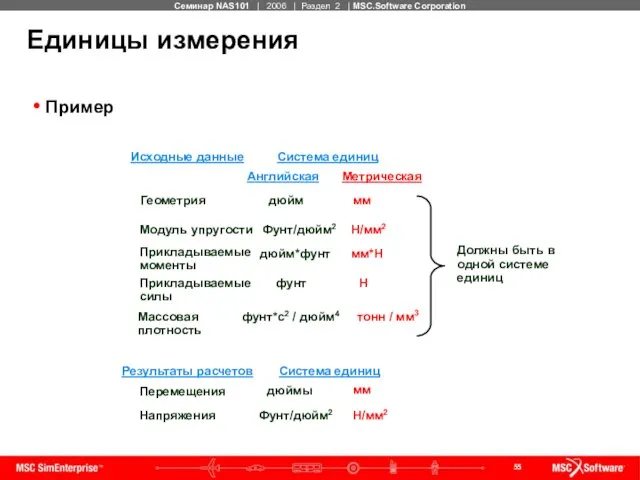
Единицы измерения
Пример
Исходные данные
Система единиц
Английская
Метрическая
Геометрия
Модуль упругости
Прикладываемые моменты
Прикладываемые силы
дюйм
дюйм*фунт
мм
Фунт/дюйм2
Н/мм2
мм*Н
фунт
Н
Должны быть в одной системе
Единицы измерения
Пример
Исходные данные
Система единиц
Английская
Метрическая
Геометрия
Модуль упругости
Прикладываемые моменты
Прикладываемые силы
дюйм
дюйм*фунт
мм
Фунт/дюйм2
Н/мм2
мм*Н
фунт
Н
Должны быть в одной системе
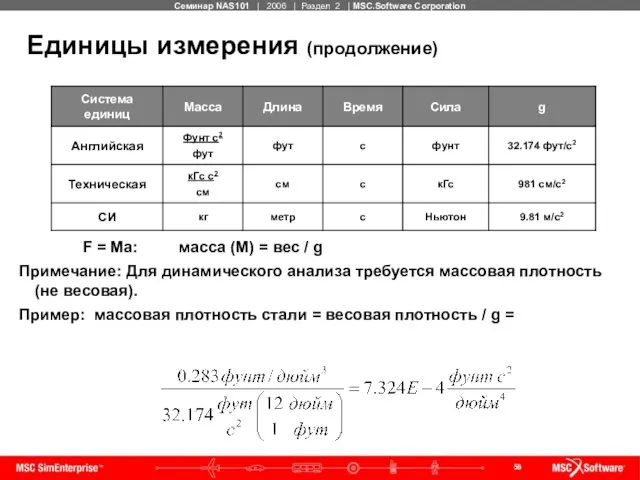
Единицы измерения (продолжение)
F = Ma: масса (М) = вес / g
Примечание: Для
Единицы измерения (продолжение)
F = Ma: масса (М) = вес / g
Примечание: Для
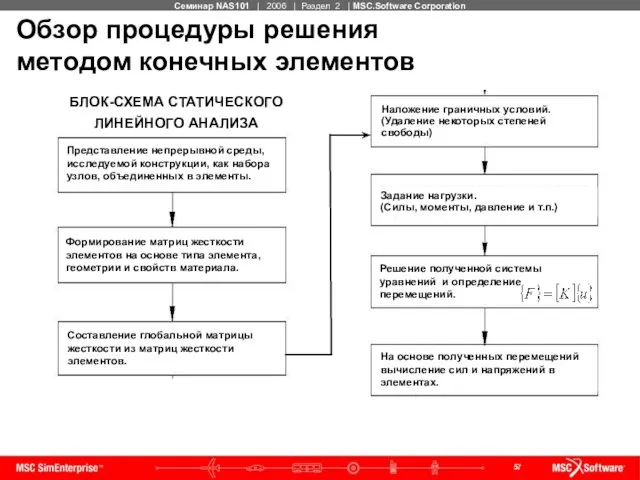
Обзор процедуры решения
методом конечных элементов
Обзор процедуры решения
методом конечных элементов
Литература по матричному анализу
Литература по матричному анализу
Литература по МКЭ
Литература по МКЭ
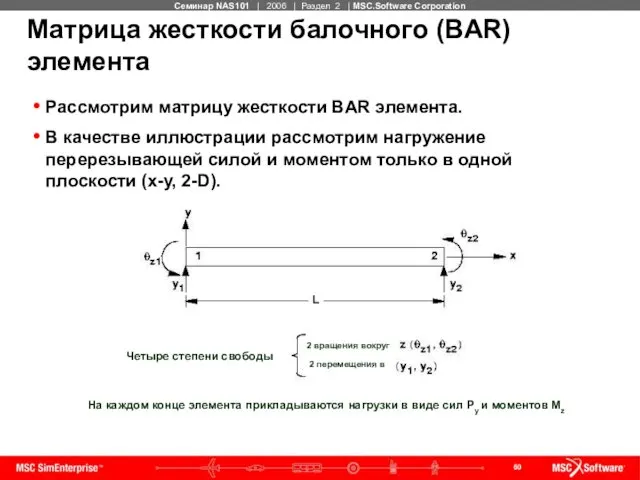
Матрица жесткости балочного (BAR) элемента
Рассмотрим матрицу жесткости BAR элемента.
В качестве
Матрица жесткости балочного (BAR) элемента
Рассмотрим матрицу жесткости BAR элемента.
В качестве
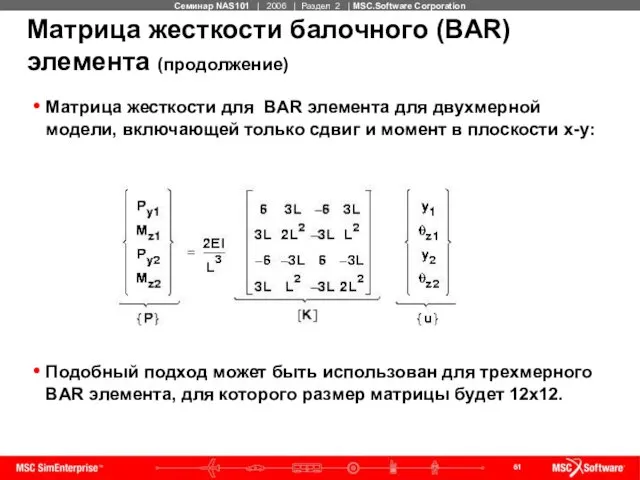
Матрица жесткости балочного (BAR) элемента (продолжение)
Матрица жесткости для BAR элемента для
Матрица жесткости балочного (BAR) элемента (продолжение)
Матрица жесткости для BAR элемента для
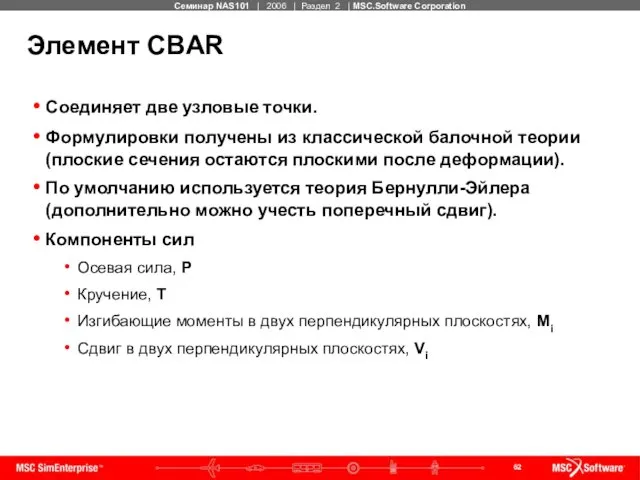
Элемент CBAR
Соединяет две узловые точки.
Формулировки получены из классической балочной теории
Элемент CBAR
Соединяет две узловые точки.
Формулировки получены из классической балочной теории
Элемент CBAR (продолжение)
Компоненты перемещения
ui
θi
Нейтральная ось может иметь отступ относительно
Элемент CBAR (продолжение)
Компоненты перемещения
ui
θi
Нейтральная ось может иметь отступ относительно
Элемент CBAR (продолжение)
Принципиальные ограничения (продолжение)
Центр сдвига и нейтральная ось должны совпадать
Элемент CBAR (продолжение)
Принципиальные ограничения (продолжение)
Центр сдвига и нейтральная ось должны совпадать
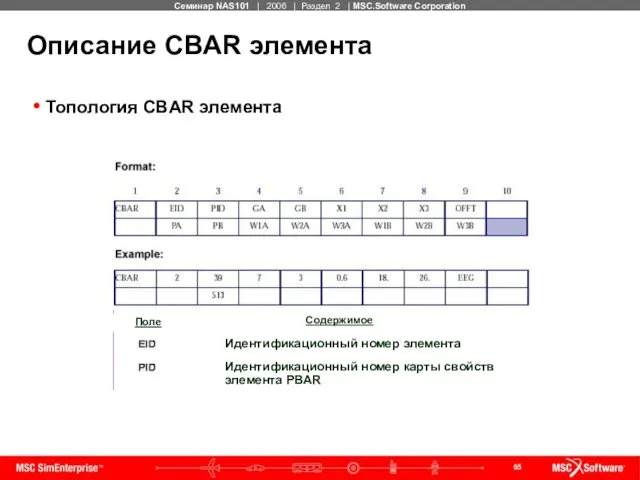
Описание CBAR элемента
Топология CBAR элемента
Описание CBAR элемента
Топология CBAR элемента
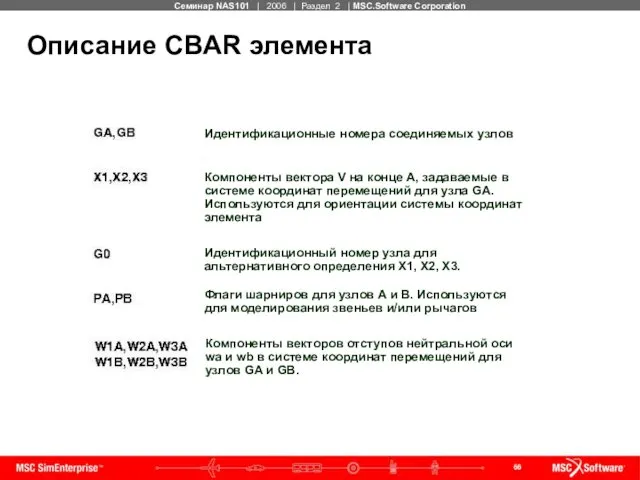
Описание CBAR элемента
Описание CBAR элемента
Описание CBAR элемента
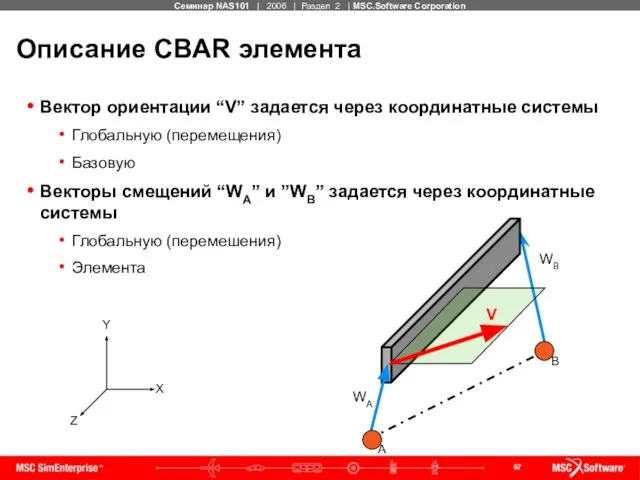
Вектор ориентации “V” задается через координатные системы
Глобальную (перемещения)
Базовую
Векторы
Описание CBAR элемента
Вектор ориентации “V” задается через координатные системы
Глобальную (перемещения)
Базовую
Векторы
Описание CBAR элемента
Вектор ориентации
По умолчанию используется глобальная (перемещения) система координат (поле
Описание CBAR элемента
Вектор ориентации
По умолчанию используется глобальная (перемещения) система координат (поле

Описание CBAR элемента
По умолчанию
Описание CBAR элемента
По умолчанию

Описание CBAR элемента (с версии 2005)
По умолчанию
Описание CBAR элемента (с версии 2005)
По умолчанию

Описание CBAR элемента (продолжение)
Система координат CBAR элемента
Описание CBAR элемента (продолжение)
Система координат CBAR элемента
Описание CBAR элемента (продолжение)
Описание CBAR элемента (продолжение)
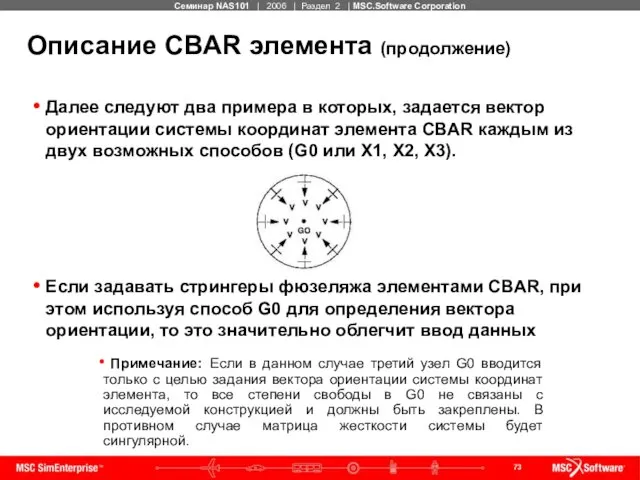
Описание CBAR элемента (продолжение)
Далее следуют два примера в которых, задается вектор
Описание CBAR элемента (продолжение)
Далее следуют два примера в которых, задается вектор
Описание CBAR элемента (продолжение)
Для определения ориентации ножек треножника, моделируемого элементами CBAR,
Описание CBAR элемента (продолжение)
Для определения ориентации ножек треножника, моделируемого элементами CBAR,
Описание CBAR элемента (продолжение)
Смещения:
Концы элемента CBAR могут быть смещены относительно узлов
Описание CBAR элемента (продолжение)
Смещения:
Концы элемента CBAR могут быть смещены относительно узлов
Описание CBAR элемента (продолжение)
Флаги шарниров:
Пользователь указывает степени свободы на каждом из
Описание CBAR элемента (продолжение)
Флаги шарниров:
Пользователь указывает степени свободы на каждом из
Описание оператора PBAR
Свойства CBAR элемента записываются операторами PBAR или PBARL:
Описание оператора PBAR
Свойства CBAR элемента записываются операторами PBAR или PBARL:
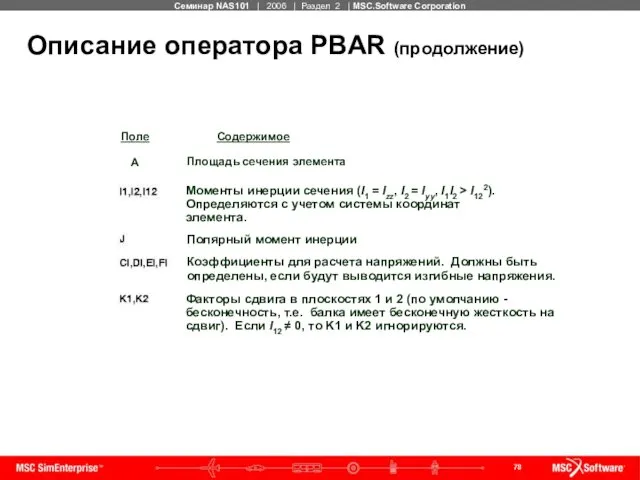
Описание оператора PBAR (продолжение)
Описание оператора PBAR (продолжение)
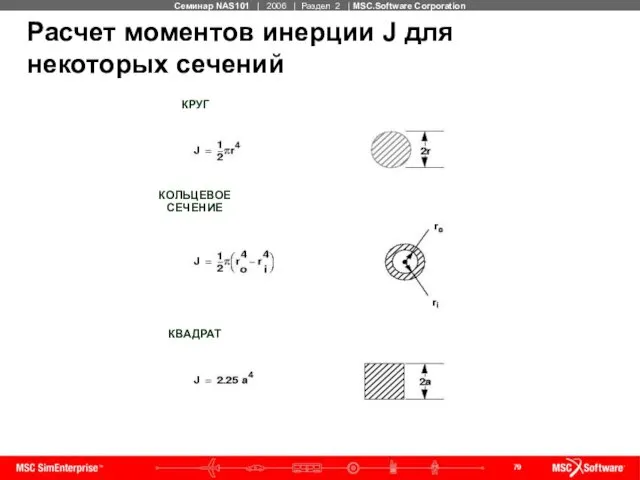
Расчет моментов инерции J для некоторых сечений
Расчет моментов инерции J для некоторых сечений
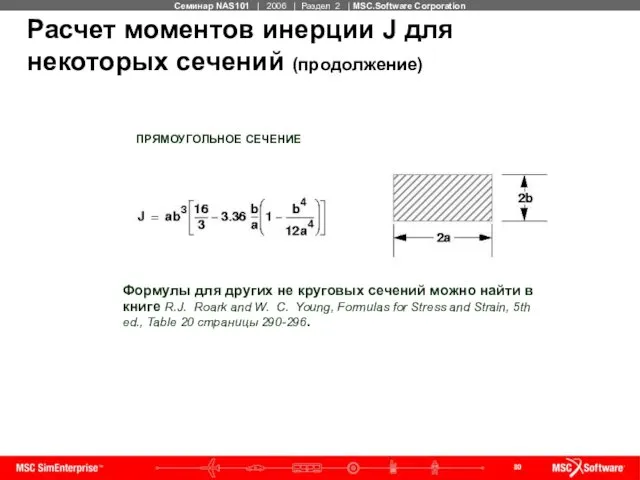
Расчет моментов инерции J для некоторых сечений (продолжение)
Расчет моментов инерции J для некоторых сечений (продолжение)
Поперечный сдвиг
Сдвиговые перемещения балки - V, рассчитываются по формуле
V =
Поперечный сдвиг
Сдвиговые перемещения балки - V, рассчитываются по формуле
V =
Поперечный сдвиг (продолжение)
K определяет распределение сдвига по сечению элемента и ее
Поперечный сдвиг (продолжение)
K определяет распределение сдвига по сечению элемента и ее
Поперечный сдвиг (продолжение)
Значения К для некоторых сечений
Литература:
Roark and Young, Formulas
Поперечный сдвиг (продолжение)
Значения К для некоторых сечений
Литература:
Roark and Young, Formulas
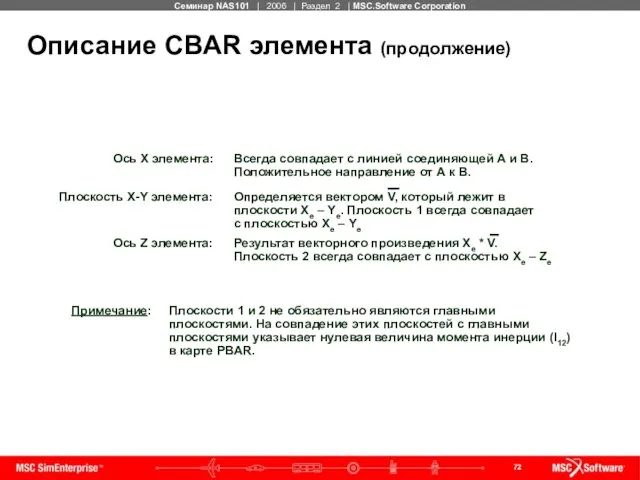
Описание CBAR элемента (продолжение)
Ориентация системы координат элемента определяет плоскости сечения 1
Описание CBAR элемента (продолжение)
Ориентация системы координат элемента определяет плоскости сечения 1

Описание CBAR элемента (продолжение)
Для такой системы координат элемента:
Описание CBAR элемента (продолжение)
Для такой системы координат элемента:
Описание оператора PBARL
Формат записи PBARL:
Описание оператора PBARL
Формат записи PBARL:
Описание оператора PBARL (продолжение)
где:
Описание оператора PBARL (продолжение)
где:
Описание оператора PBARL (продолжение)
Описание оператора PBARL (продолжение)
Описание оператора PBARL (продолжение)
Описание оператора PBARL (продолжение)

Описание оператора PBARL (продолжение)
Описание оператора PBARL (продолжение)
Описание оператора PBARL (продолжение)
Описание оператора PBARL (продолжение)

Силы в балочном элементе
Внутренние силы и моменты элемента BAR:
Силы в балочном элементе
Внутренние силы и моменты элемента BAR:

Силы в балочном элементе (продолжение)
Это можно также представить как:
Силы в балочном элементе (продолжение)
Это можно также представить как:
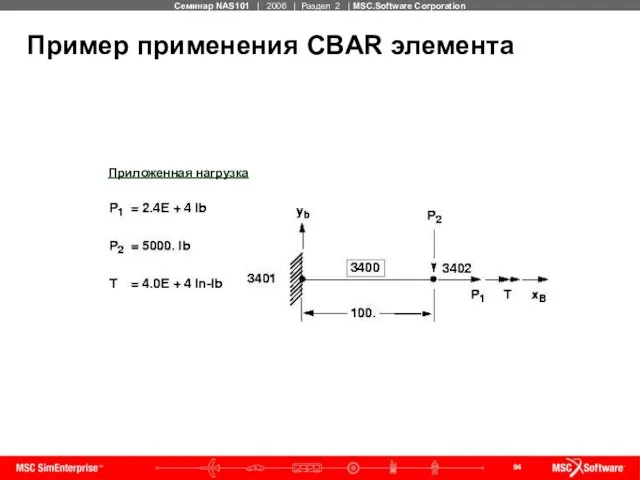
Пример применения CBAR элемента
Пример применения CBAR элемента
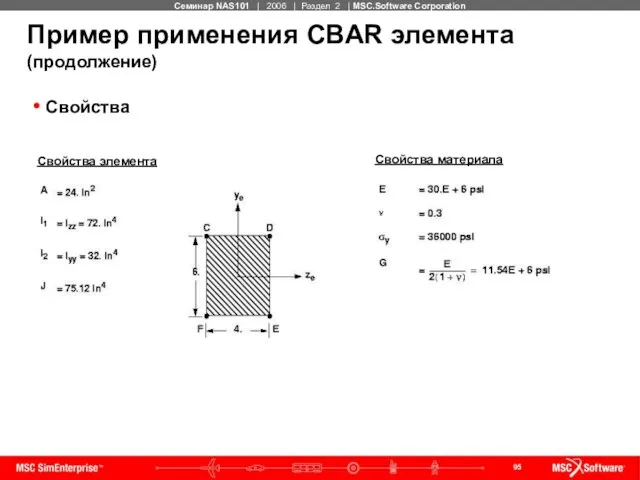
Пример применения CBAR элемента (продолжение)
Свойства
Пример применения CBAR элемента (продолжение)
Свойства
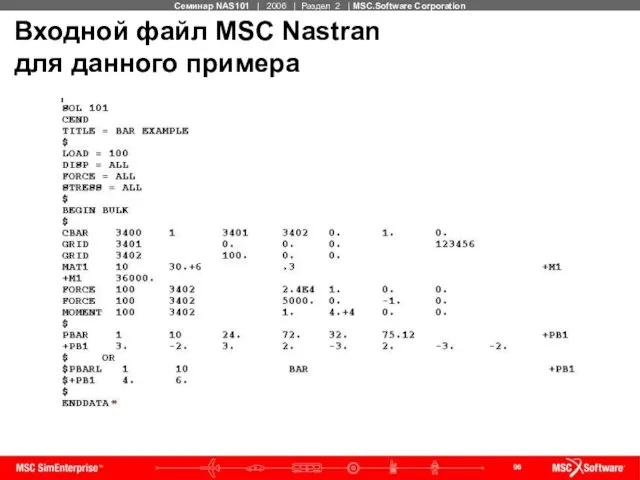
Входной файл MSC Nastran
для данного примера
Входной файл MSC Nastran
для данного примера
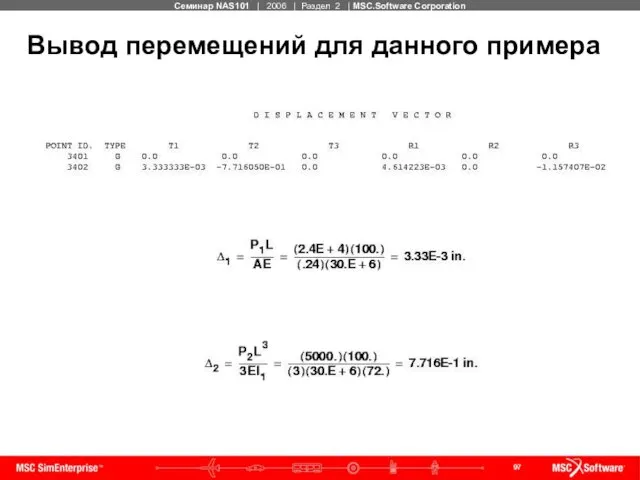
Вывод перемещений для данного примера
Вывод перемещений для данного примера
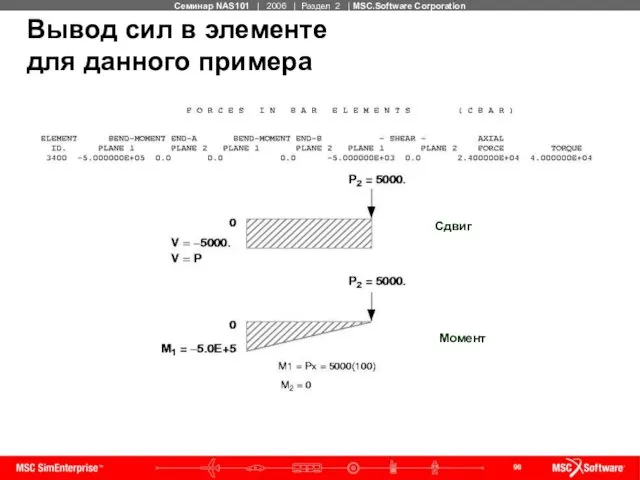
Вывод сил в элементе
для данного примера
Сдвиг
Момент
Вывод сил в элементе
для данного примера
Сдвиг
Момент
 Наблюдение интерференции и дифракции света
Наблюдение интерференции и дифракции света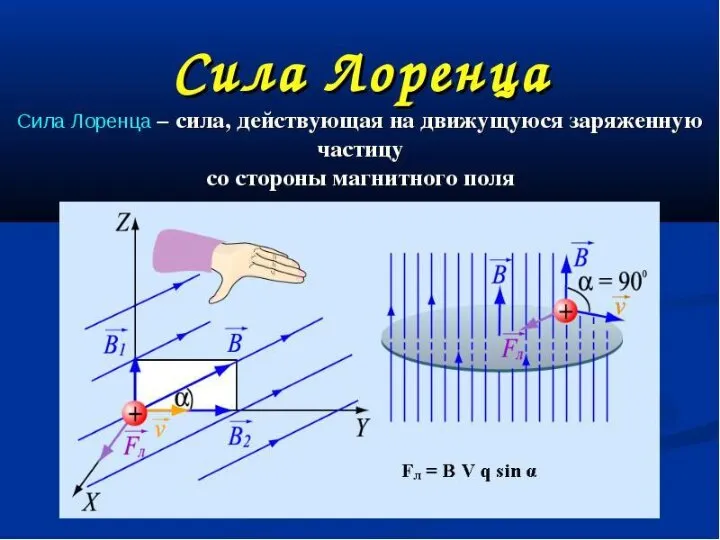 Сила Лоренца. Модуль силы Лоренца
Сила Лоренца. Модуль силы Лоренца Оптика и квантовая физика. Лекция 11
Оптика и квантовая физика. Лекция 11 Сейсмическая разведка
Сейсмическая разведка Интерференция света
Интерференция света Элементы ядерной физики и физики элементарных частиц
Элементы ядерной физики и физики элементарных частиц Электомагнитные колебания и волны. Лекция 8
Электомагнитные колебания и волны. Лекция 8 Альтернативні джерела енергії
Альтернативні джерела енергії Комплексные методы анализа ГХ-МС и ВЭЖХ-МС
Комплексные методы анализа ГХ-МС и ВЭЖХ-МС Интерференция света
Интерференция света Комплексный потенциал. Лекция 6
Комплексный потенциал. Лекция 6 Кинематика материальной точки и поступательного движения твердого тела
Кинематика материальной точки и поступательного движения твердого тела Физические явления Гроза, гром и молния
Физические явления Гроза, гром и молния Система Интрнет-олимпиад СПбПУ Тренировочный тур 8 класс
Система Интрнет-олимпиад СПбПУ Тренировочный тур 8 класс Электроснабжение поселка Михайловка
Электроснабжение поселка Михайловка Преломление света
Преломление света Методическая разработка урока по физике 8 класс на тему: «Расчет сопротивления проводников». учитель физики МОУ СОШ № 4 с.п. И
Методическая разработка урока по физике 8 класс на тему: «Расчет сопротивления проводников». учитель физики МОУ СОШ № 4 с.п. И Твердотопливный ракетный двигатель
Твердотопливный ракетный двигатель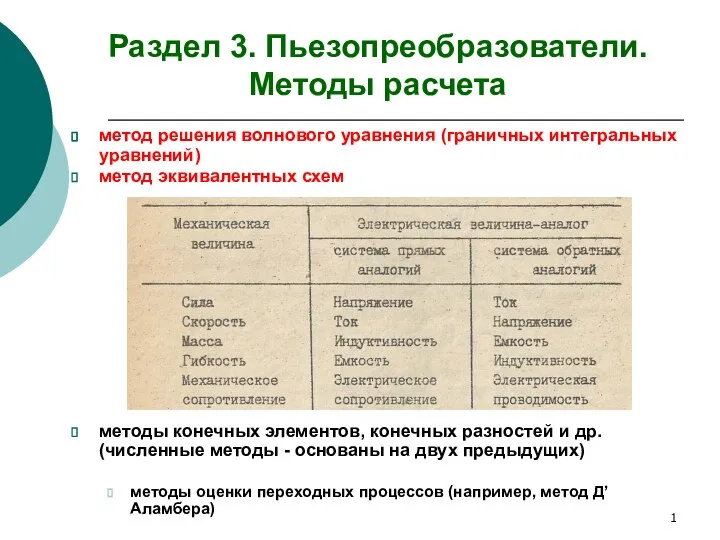 Пьезопреобразователи. Методы расчета. (Раздел 3)
Пьезопреобразователи. Методы расчета. (Раздел 3) Концепция пространства и времени в естествознании
Концепция пространства и времени в естествознании РАВНОМЕРНОЕ ДВИЖЕНИЕ Механическое движение: перемещение, скорость, ускорение
РАВНОМЕРНОЕ ДВИЖЕНИЕ Механическое движение: перемещение, скорость, ускорение ТЕРМОМЕТР
ТЕРМОМЕТР Ультразвуковой контроль
Ультразвуковой контроль Фотоэффект – это явление вырывания электронов из вещества под действием света.
Фотоэффект – это явление вырывания электронов из вещества под действием света. Атом водорода по Бору. Квантовые постулаты
Атом водорода по Бору. Квантовые постулаты Генрих Фридрих Эмиль Ленц или Эмилий Христианович Ленц
Генрих Фридрих Эмиль Ленц или Эмилий Христианович Ленц Презентация по физике "Физика и космическая еда" - скачать
Презентация по физике "Физика и космическая еда" - скачать  Взаимодействие токов. Магнитное поле. Магнитная индукция. Линии магнитной индукции
Взаимодействие токов. Магнитное поле. Магнитная индукция. Линии магнитной индукции