- Плоскопараллельное движение твердого тела (тема 3)

Содержание
- 2. Независимость угловой скорости и углового ускорения плоской фигуры от выбора полюса – Выберем два произвольных прямолинейных
- 3. Мгновенный центр скоростей (МЦС) – При движении плоской фигуры в каждый момент времени существует точка, жестко
- 4. Примеры использования МЦС для определения скоростей точек плоской фигуры – Поскольку при движении плоской фигуры в
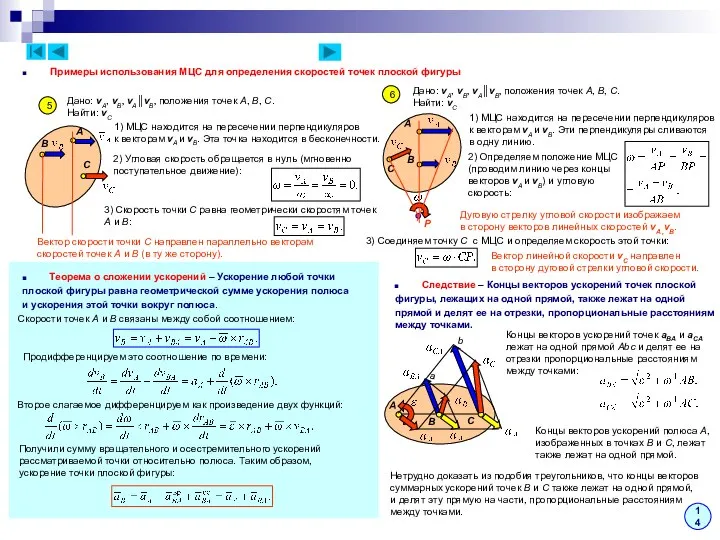
- 5. Примеры использования МЦС для определения скоростей точек плоской фигуры 5 Дано: vA, vB, vA║vB, положения точек
- 6. Мгновенный центр ускорений (МЦУ) – При движении плоской фигуры в каждый момент времени существует точка, жестко
- 8. Скачать презентацию
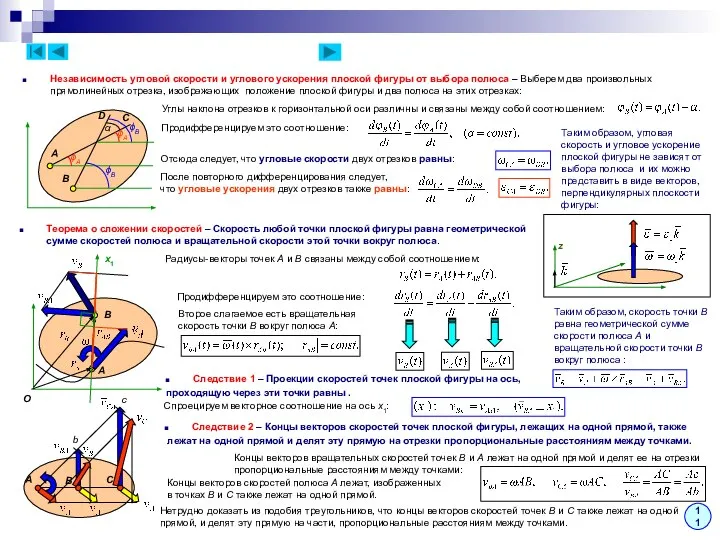
Независимость угловой скорости и углового ускорения плоской фигуры от выбора полюса
Независимость угловой скорости и углового ускорения плоской фигуры от выбора полюса
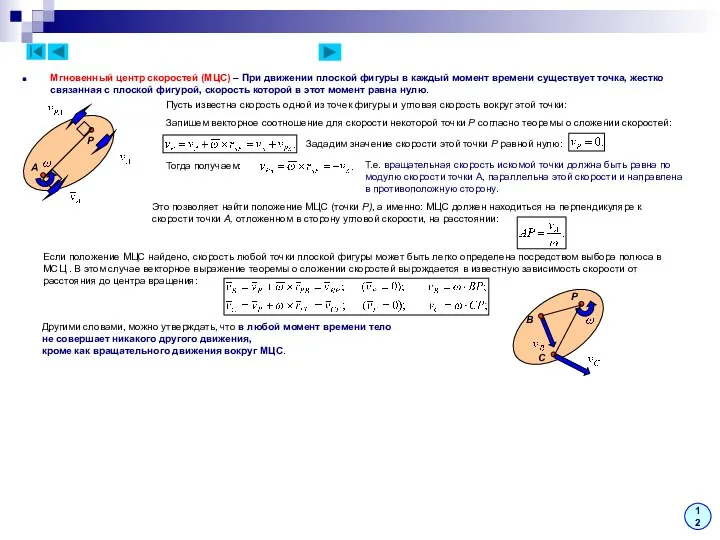
Мгновенный центр скоростей (МЦС) – При движении плоской фигуры в каждый
Мгновенный центр скоростей (МЦС) – При движении плоской фигуры в каждый
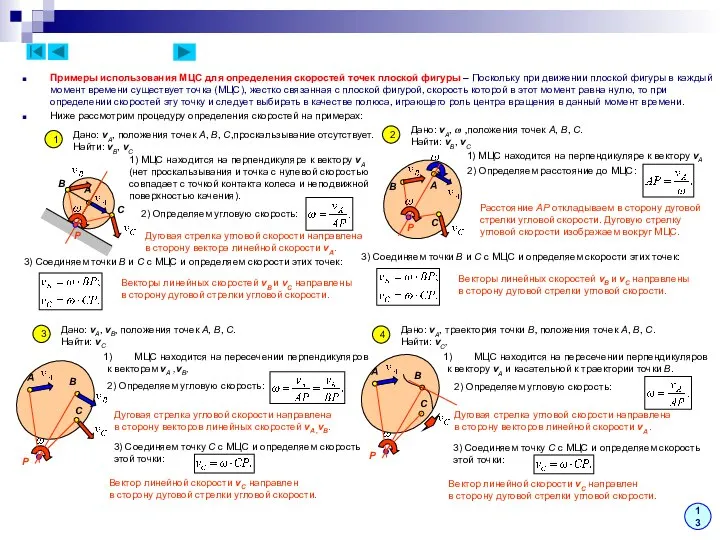
Примеры использования МЦС для определения скоростей точек плоской фигуры – Поскольку
Примеры использования МЦС для определения скоростей точек плоской фигуры – Поскольку
Примеры использования МЦС для определения скоростей точек плоской фигуры
5
Дано: vA, vB,
Примеры использования МЦС для определения скоростей точек плоской фигуры
5
Дано: vA, vB,

Мгновенный центр ускорений (МЦУ) – При движении плоской фигуры в каждый
Мгновенный центр ускорений (МЦУ) – При движении плоской фигуры в каждый
 Перемещение при прямолинейном равноускоренном движении
Перемещение при прямолинейном равноускоренном движении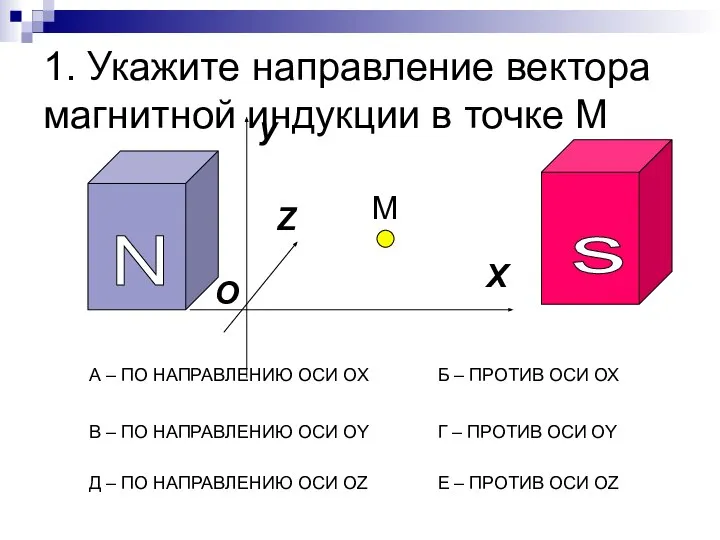 Тест по теме Электромагнетизм
Тест по теме Электромагнетизм Таинственная энергетика пирамид. Работу выполнила ученица 10 А класса МОУ « СОШ № 95 им. Н. Щукина п. Архара» Остапенко
Таинственная энергетика пирамид. Работу выполнила ученица 10 А класса МОУ « СОШ № 95 им. Н. Щукина п. Архара» Остапенко  Lego 9689 Простые механизмы
Lego 9689 Простые механизмы Разработка технологии ремонта гильз цилиндров дизельных двигателей
Разработка технологии ремонта гильз цилиндров дизельных двигателей Измерение массы тела на рычажных весах
Измерение массы тела на рычажных весах Відкриття атомного ядра
Відкриття атомного ядра Источники света. Распространение света
Источники света. Распространение света Источники света. Прямолинейное распространение света.
Источники света. Прямолинейное распространение света. Кіріспе. Сенімділік теория түсініктемесі және басты анықтамасы. Техникалық жүйенің көрсеткіштері
Кіріспе. Сенімділік теория түсініктемесі және басты анықтамасы. Техникалық жүйенің көрсеткіштері Устройство увеличительных приборов и правила работы с ними
Устройство увеличительных приборов и правила работы с ними Определение шума и вибрации
Определение шума и вибрации Нетрадиционные электростанции
Нетрадиционные электростанции Использование солнечной энергии на Земле
Использование солнечной энергии на Земле Голография
Голография Электрический ток в различных средах. Закономерность протекания тока
Электрический ток в различных средах. Закономерность протекания тока Квантовые явления. Ядро атома
Квантовые явления. Ядро атома Энергияның негізгі көздері, электрстанцияларының сипаттамасы
Энергияның негізгі көздері, электрстанцияларының сипаттамасы Метрики. Эффективность распараллеливания. (Лабораторная работа 2)
Метрики. Эффективность распараллеливания. (Лабораторная работа 2) Источники света. Распространение света
Источники света. Распространение света ПЕРВОЕ НАЧАЛО ТЕРМОДИНАМИКИ. ВНУТРЕННЯЯ ЭНЕРГИЯ. РАБОТА И ТЕПЛОТА 1. Внутренняя энергия. Работа и теплота 2. Теплоёмкость идеал
ПЕРВОЕ НАЧАЛО ТЕРМОДИНАМИКИ. ВНУТРЕННЯЯ ЭНЕРГИЯ. РАБОТА И ТЕПЛОТА 1. Внутренняя энергия. Работа и теплота 2. Теплоёмкость идеал Вынужленные колебания, затухающие колебания
Вынужленные колебания, затухающие колебания Презентация Давление. Гидравлический пресс
Презентация Давление. Гидравлический пресс  Закон сохранения импульса
Закон сохранения импульса Презентация по физике Тепловые явления Выполнила: ученица 8 «А» класса ГОУ СОШ №1973 Прохорчик Светлана
Презентация по физике Тепловые явления Выполнила: ученица 8 «А» класса ГОУ СОШ №1973 Прохорчик Светлана Силы в природе
Силы в природе 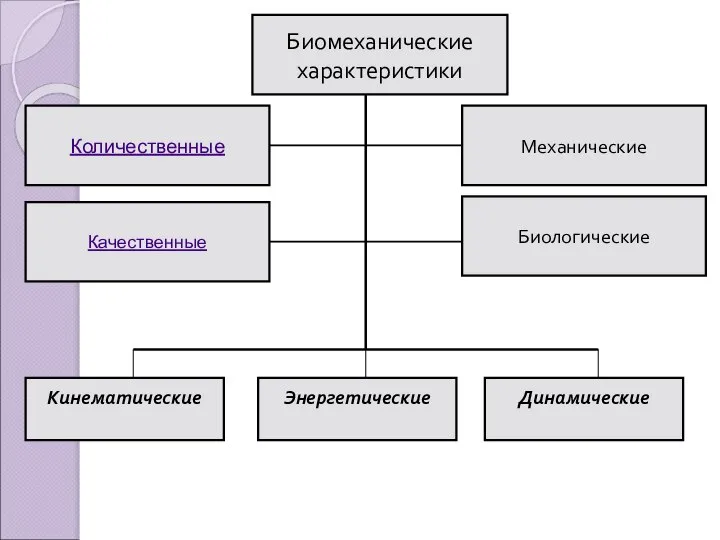 Биомеханические характеристики
Биомеханические характеристики Давление в технике и строительстве
Давление в технике и строительстве