- Программа диагностики автомобиля, уровень пассажира (SDP, PL-1). Основы технологии шасси

Содержание
- 4. ■ Система основополагающих принципов Группа компаний Hyundai Motor стремится создавать ценности и способствовать гармоничному росту всех
- 5. Обзор группы и отрасли промышленности ■ Обзор группы компаний Hyundai Motor * По состоянию на 2011
- 7. Содержание
- 9. Модуль 1. АКПП (автоматическая коробка передач) Цель обучения 1. Обзор 1.1 Введение 1.2 Модельный ряд 1.3
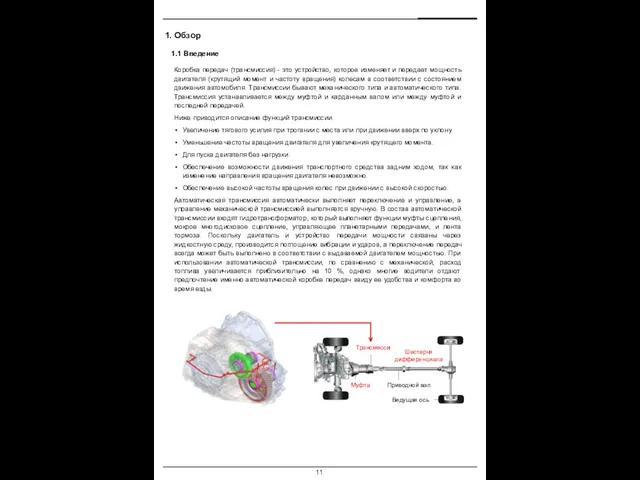
- 11. 1. Обзор 1.1 Введение Коробка передач (трансмиссия) - это устройство, которое изменяет и передает мощность двигателя
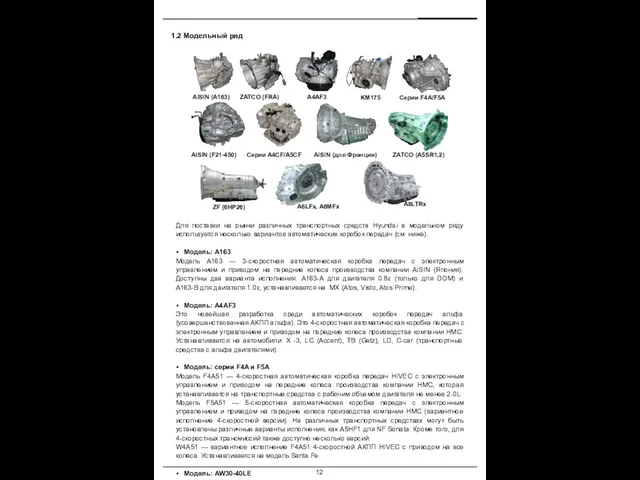
- 12. 1.2 Модельный ряд Для поставки на рынки различных транспортных средств Hyundai в модельном ряду используется несколько
- 13. Модель: FRA Это 4-скоростная автоматическая коробка передач с электронным управлением и приводом на передние колеса производства
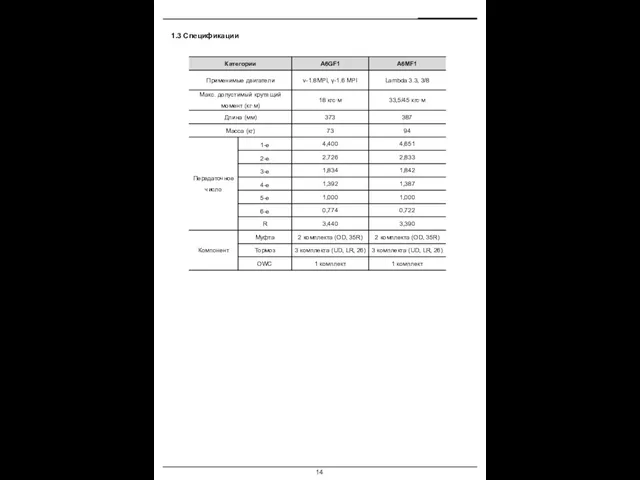
- 14. 1.3 Спецификации
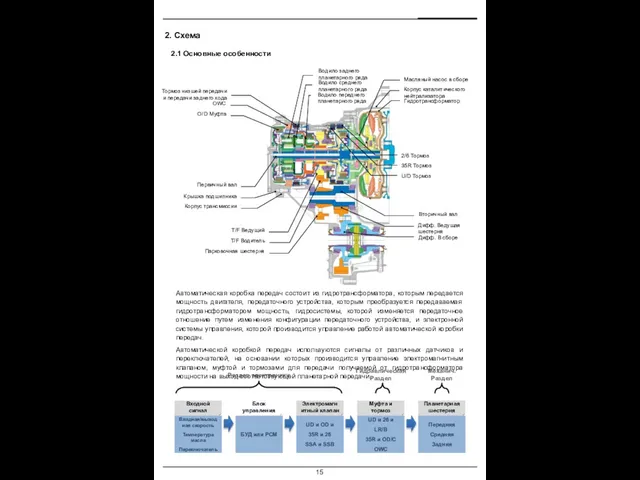
- 15. 2. Схема 2.1 Основные особенности Автоматическая коробка передач состоит из гидротрансформатора, которым передается мощность двигателя, передаточного
- 16. 2.2 Входные и выходные элементы Блок управления трансмиссией (БУТ) выполняет обработку полученных от датчиков сигналов для
- 17. 3.1 Механические компоненты Гидротрансформатор Функции и роли Гидротрансформатор служит для передачи мощности от двигателя к трансмиссии
- 18. Блокировочная муфта гидротрансформатора Механизм Вследствие того, что в гидродинамической муфте требуется минимальное различие в частоте вращения
- 19. 3) Планетарная шестерня Одинарный планетарный ряд состоит из следующих элементов: зубчатый венец (коронное колесо), сателлиты (планетарные
- 20. 4) Тормоз и муфта Функции и роли Названиями указываются муфты и тормоза, используемые для соединения или
- 21. Механизм Многодисковые муфты состоят из барабана, ведомого и ведущего дисков. Ведомые диски соединяются с барабаном, а
- 22. 3.3 Компоненты гидравлического управления Масляный насос Функции и роли Приводится в действие о гидротрансформатора. Предназначен для
- 23. Магистральный клапан Редукционный клапан Клапан, предназначенный для поддержания гидравлического давления на уровне ниже магистрального давления. Регулирующий
- 24. Аккумулятор Функции и роли Аккумулятор установлен в канале подачи гидравлической жидкости к муфте и тормозам. Им
- 25. 3.3 Входные элементы БУТ Датчики частоты вращения первичного и вторичного валов Функции и роли Датчиками частоты
- 26. Выключатель блокировки Функции и роли Выключатель блокировки определяет положение селектора (P-R-N-D) и посылает оперативные данные на
- 27. OTS (датчик температуры масла) Функции и роли Датчик температуры масла установлен непосредственно в блоке управляющих клапанов,
- 28. Электромагнитный клапан Функции и роли Электромагнитный клапан установлен на блоке управляющих клапанов АКПП и действует в
- 29. Работа электромагнитного клапана Исходя из того, что название муфты и тормоза было присвоено на основании положения
- 30. 4.1 Работа муфты и тормоза 4. Силовой агрегат Таблица работы муфты и тормоза ●: Включено гидравлическое
- 31. 1-я передача Схема передачи мощности : Турбина → Входной вал → Задняя солнечная шестерня → →
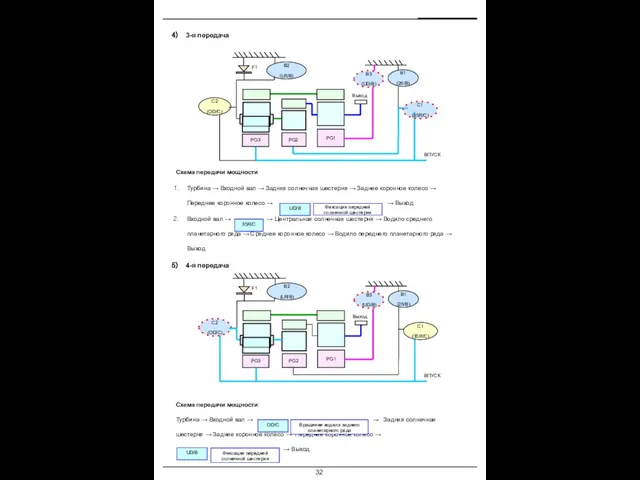
- 32. 3-я передача Схема передачи мощности Турбина → Входной вал → Задняя солнечная шестерня → Заднее коронное
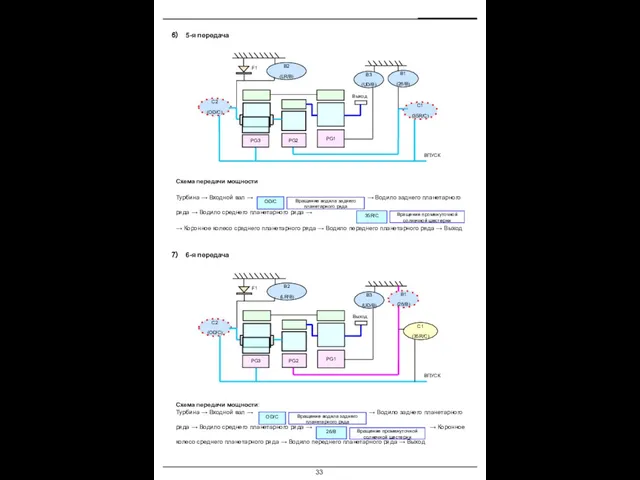
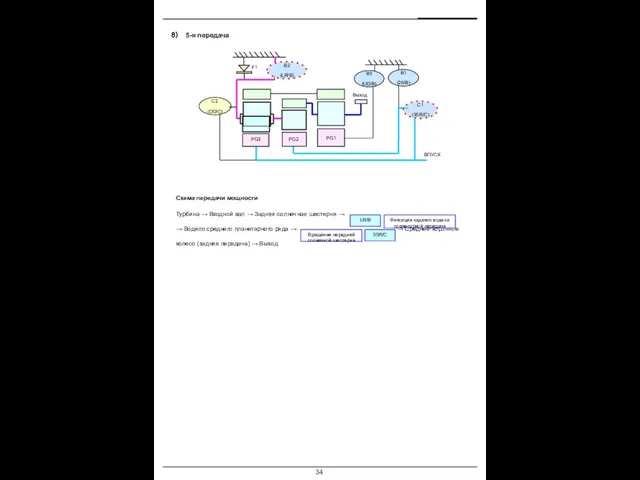
- 33. 5-я передача Схема передачи мощности Турбина → Входной вал → → Водило заднего планетарного ряда →
- 34. 5-я передача Схема передачи мощности Турбина → Входной вал → Задняя солнечная шестерня → → Водило
- 35. 5.1 Регулировка уровня масла Проверка ATF 5. Техническое обслуживание Процедура Открыть крышку наливной горловины ATF и
- 36. 5.2 Программирование блока управления трансмиссией Программирование БУТ минимизирует влияние отклонений при массовом производстве, обеспечивает более плавное
- 37. 5.3 Регулирование троса переключателя блокировки При генерации кода DTC для переключателя блокировки или в случае периодической
- 39. Модуль 2 4WD (привод на четыре колеса) 1. Обзор 1.1 Введение 1.2 Схема полного привода 1.3
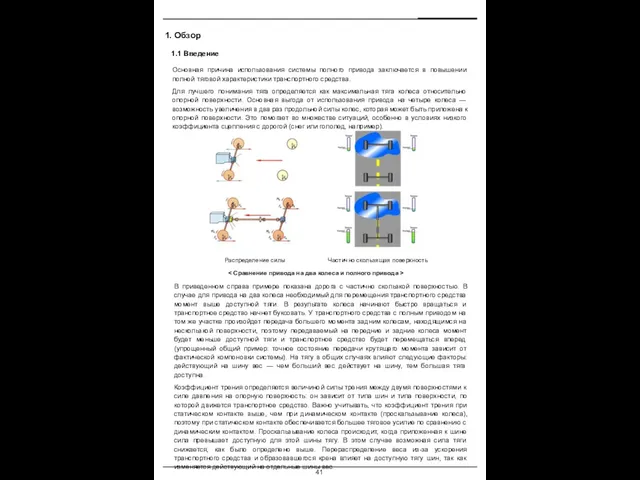
- 41. 1. Обзор 1.1 Введение Основная причина использования системы полного привода заключается в повышении полной тяговой характеристики
- 42. 1.2 Типы полного привода Ниже приводится описание некоторых из возможных и наиболее часто применимых компоновок систем
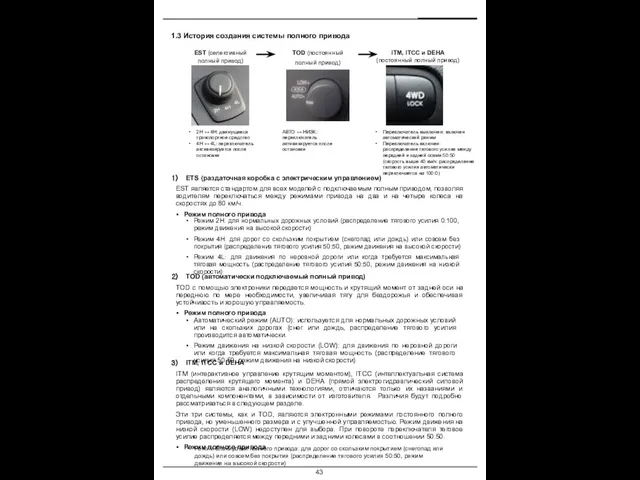
- 43. 1.3 История создания системы полного привода EST (селективный полный привод) TOD (постоянный полный привод) ITM, ITCC
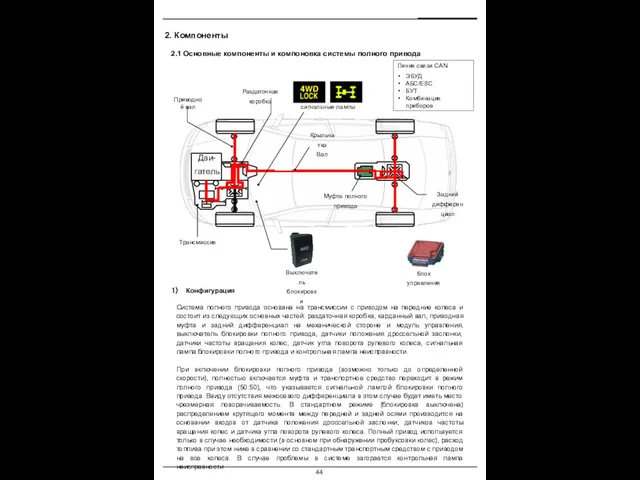
- 44. 2. Компоненты 2.1 Основные компоненты и компоновка системы полного привода Система полного привода основана на трансмиссии
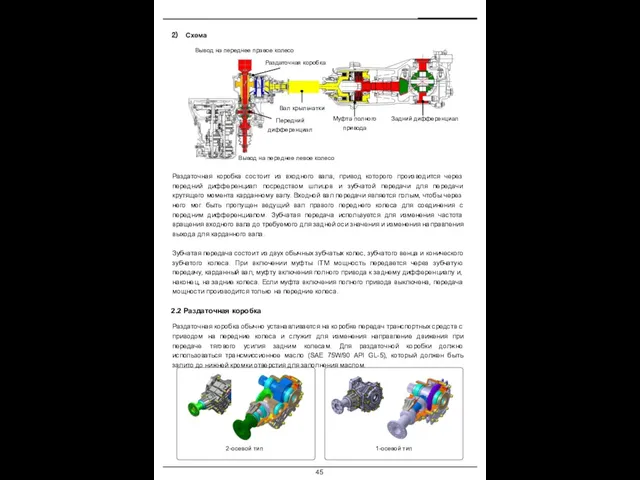
- 45. 2.2 Раздаточная коробка Раздаточная коробка состоит из входного вала, привод которого производится через передний дифференциал посредством
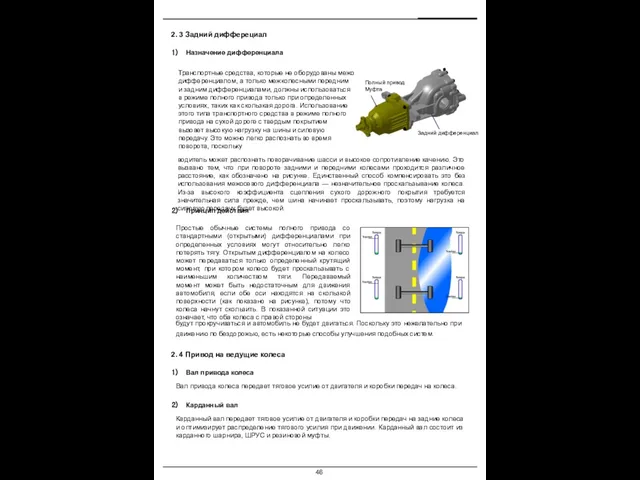
- 46. Транспортные средства, которые не оборудованы межосевым дифференциалом, а только межколесными передним и задним дифференциалами, должны использоваться
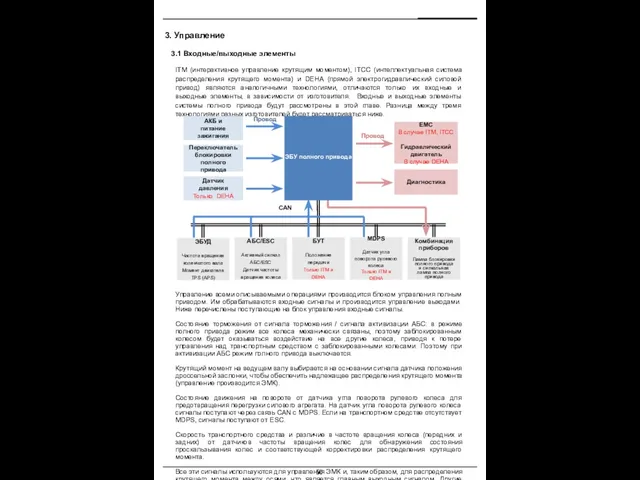
- 47. 2. 2.5 ЭБУ полного привода Блок управления полным приводом на основании сигналов от различных датчиков определяет
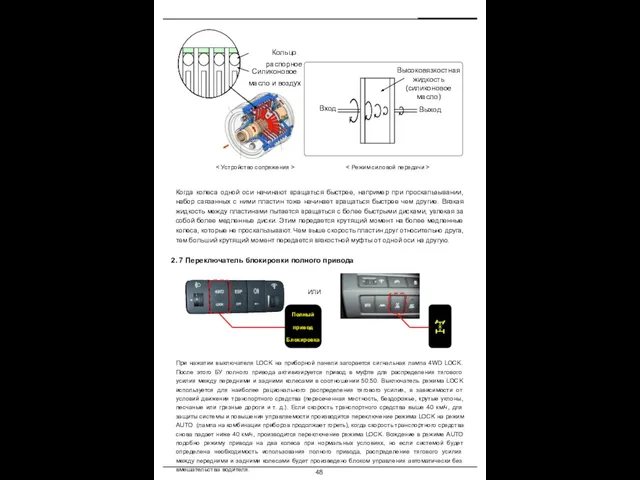
- 48. Когда колеса одной оси начинают вращаться быстрее, например при проскальзывании, набор связанных с ними пластин тоже
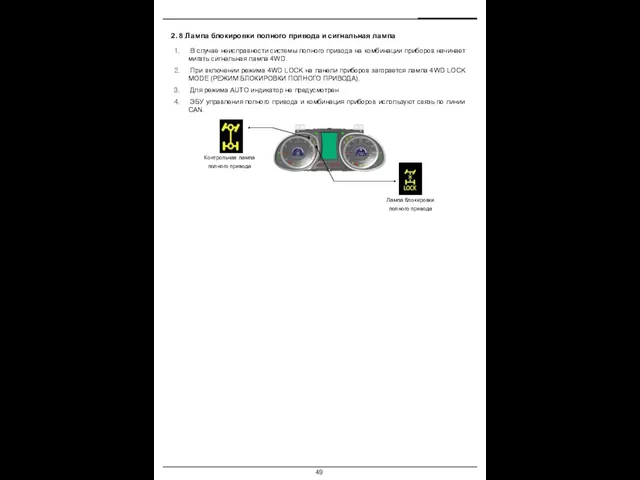
- 49. 2. 8 Лампа блокировки полного привода и сигнальная лампа В случае неисправности системы полного привода на
- 50. 3. Управление 3.1 Входные/выходные элементы ITM (интерактивное управление крутящим моментом), ITCC (интеллектуальная система распределения крутящего момента)
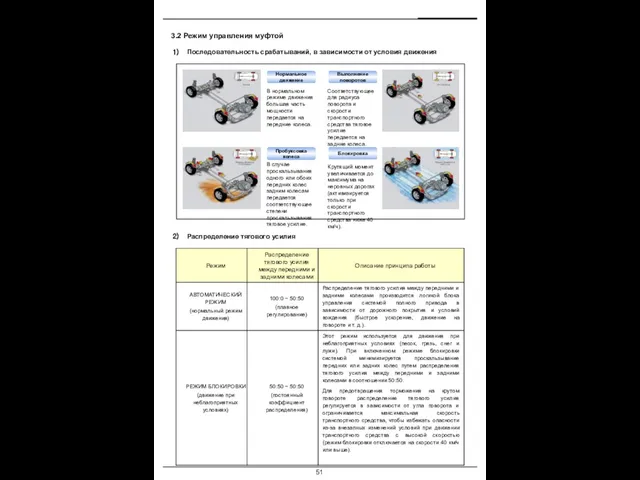
- 51. 3.2 Режим управления муфтой Нормальное движение В нормальном режиме движения большая часть мощности передается на передние
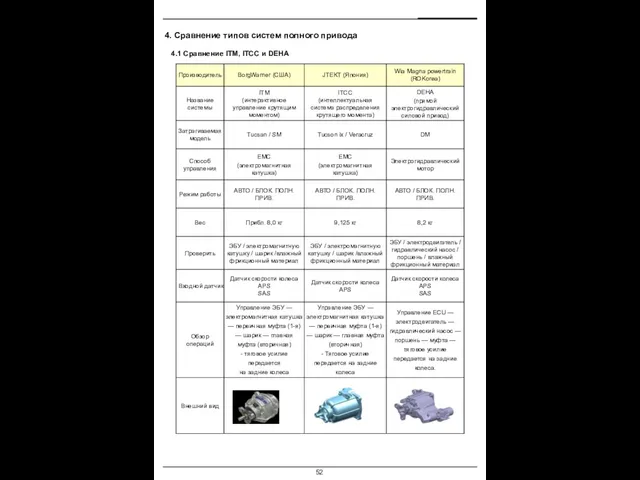
- 52. 4. Сравнение типов систем полного привода 4.1 Сравнение ITM, ITCC и DEHA
- 53. 4.2 ITM (интерактивное управление крутящим моментом) Введение Переключатель блокировки полного привода Модуль управления Раздаточная коробка Муфта
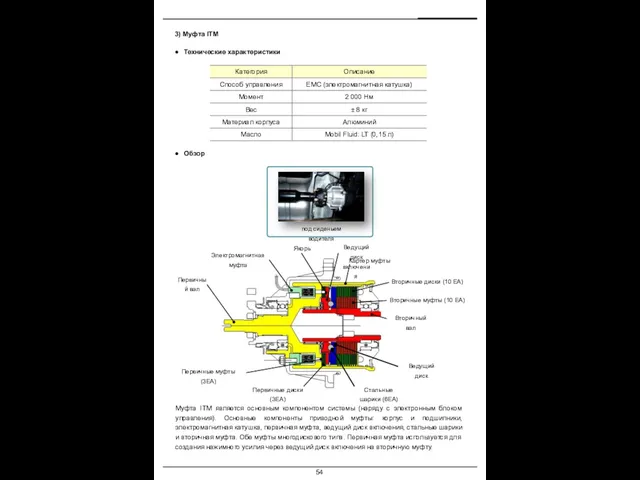
- 54. 3) Муфта ITM Технические характеристики Обзор Муфта ITM является основным компонентом системы (наряду с электронным блоком
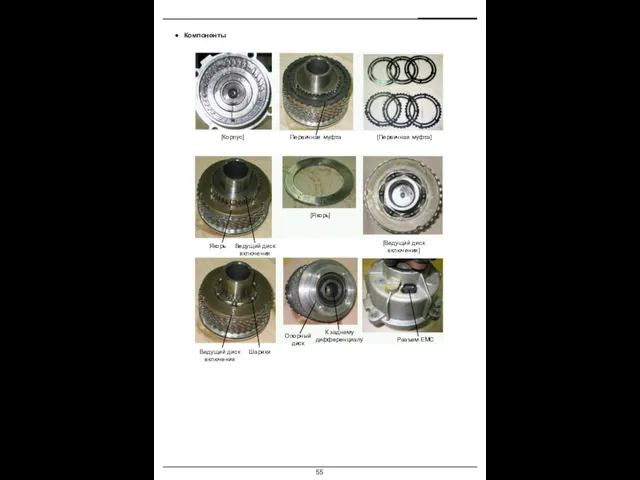
- 55. Компоненты
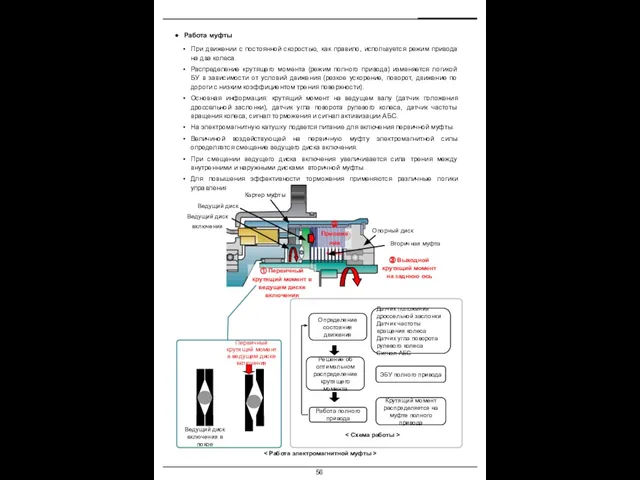
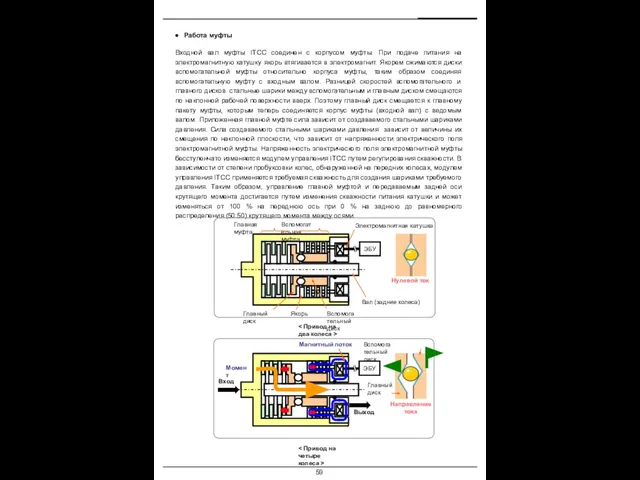
- 56. Работа муфты При движении с постоянной скоростью, как правило, используется режим привода на два колеса. Распределение
- 57. 4.3 ITCC (интеллектуальная система распределения крутящего момента) Введение Основным назначением всех систем полного привода является обеспечение
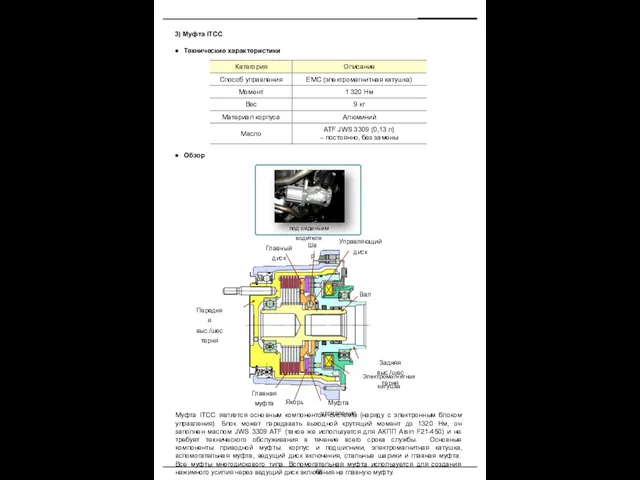
- 58. 3) Муфта ITСС Технические характеристики Обзор под сиденьем водителя Муфта ITCC является основным компонентом системы (наряду
- 59. Работа муфты Входной вал муфты ITCC соединен с корпусом муфты. При подаче питания на электромагнитную катушку
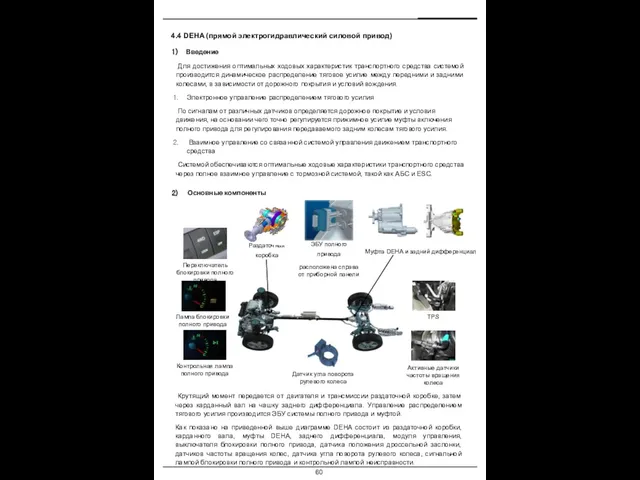
- 60. 4.4 DEHA (прямой электрогидравлический силовой привод) Введение Основные компоненты Раздаточная коробка ЭБУ полного привода расположена справа
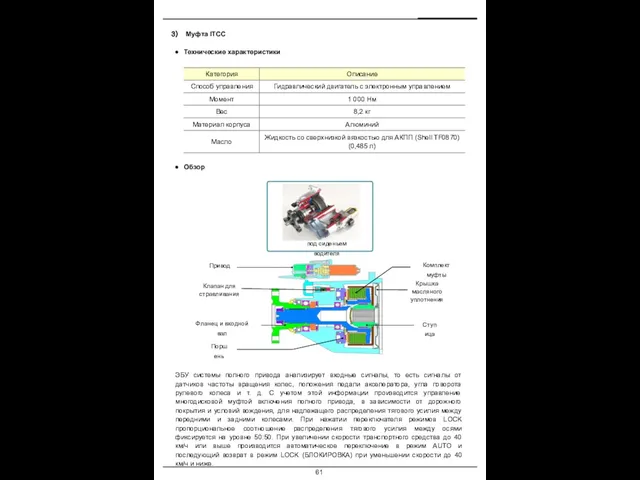
- 61. Муфта ITCC Технические характеристики Обзор ЭБУ системы полного привода анализирует входные сигналы, то есть сигналы от
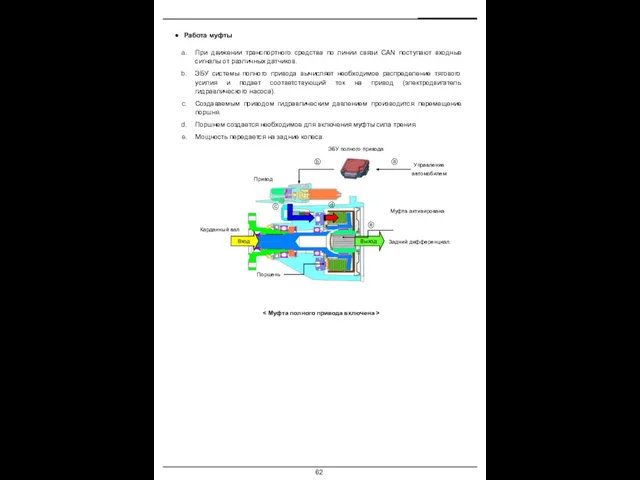
- 62. Работа муфты При движении транспортного средства по линии связи CAN поступают входные сигналы от различных датчиков.
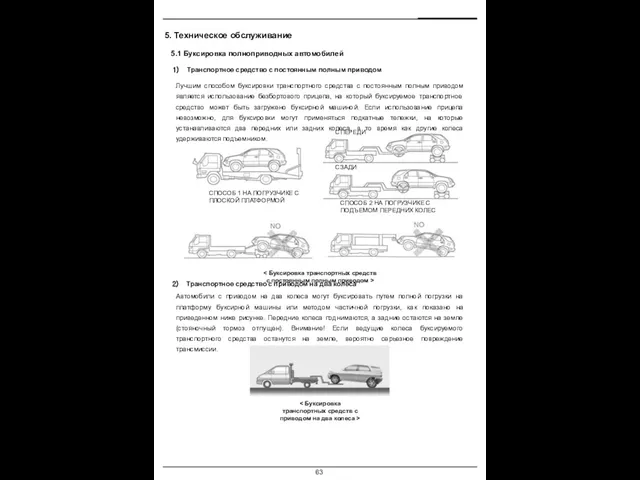
- 63. 5. Техническое обслуживание 5.1 Буксировка полноприводных автомобилей Лучшим способом буксировки транспортного средства с постоянным полным приводом
- 64. 5.2 Меры предосторожности (только для DEHA) Компенсация износа муфты
- 65. Муфта в сборе Муфта должна удерживаться в горизонтальном положении. Если воздуховыпускное устройство не будет удерживаться в
- 67. Модуль 3. ESC (электронная система динамической стабилизации) 1. Обзор 1.1 Введение 1.2 История создания ESC 1.3
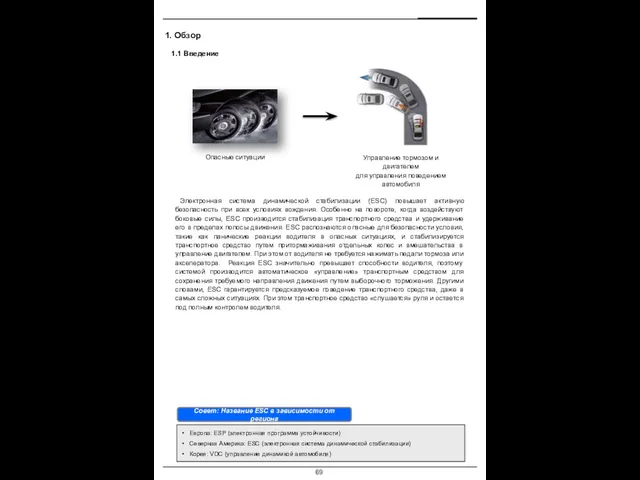
- 69. 1. Обзор 1.1 Введение Электронная система динамической стабилизации (ESC) повышает активную безопасность при всех условиях вождения.
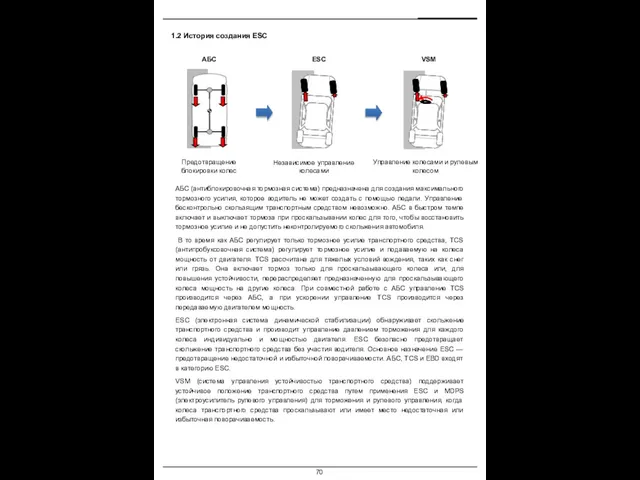
- 70. 1.2 История создания ESC Предотвращение блокировки колес Независимое управление колесами Управление колесами и рулевым колесом АБС
- 71. 1.3 Логическая схема управления ESC Угол поворота рулевого колеса Давление торможения Педаль тормоза нажата или отпущена
- 72. Совет: Автомобиль без ESC Если водитель транспортного средства без ESC резко повернет рулевое колесо для уклонения
- 73. 2. Компоненты системы 2.1 Основные компоненты
- 74. 2.2 Датчик частоты вращения колеса Датчик частоты вращения колеса (WSS) контролирует частоту вращения каждого колеса и
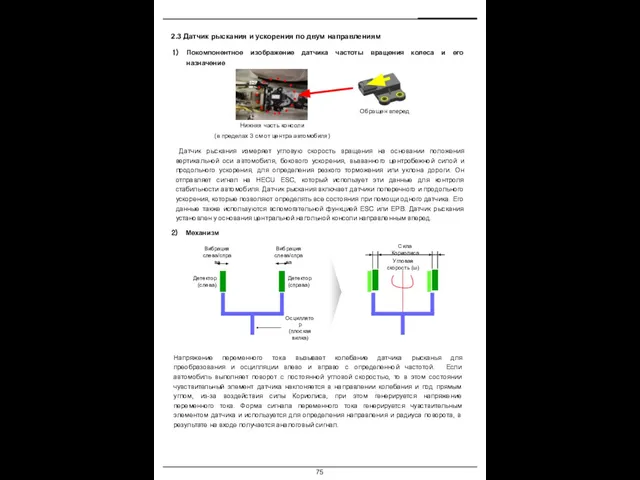
- 75. 2.3 Датчик рыскания и ускорения по двум направлениям Датчик рыскания измеряет угловую скорость вращения на основании
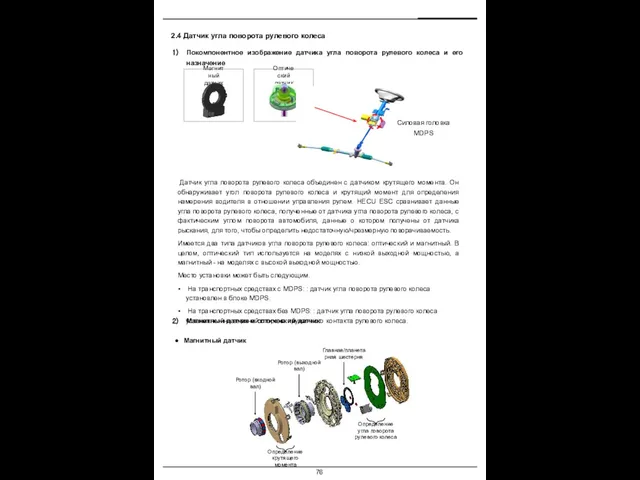
- 76. 2.4 Датчик угла поворота рулевого колеса Датчик угла поворота рулевого колеса объединен с датчиком крутящего момента.
- 77. Магнитный датчик состоит из чувствительного элемента для определения угла поворота рулевого колеса и чувствительного элемента для
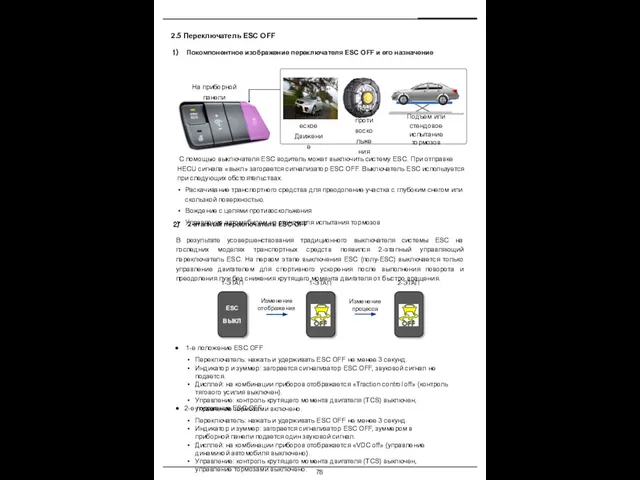
- 78. 2.5 Переключатель ESC OFF С помощью выключателя ESC водитель может выключить систему ESC. При отправке HECU
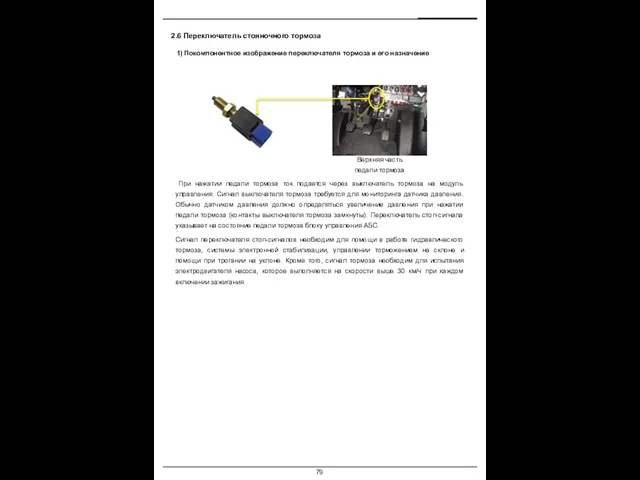
- 79. 2.6 Переключатель стояночного тормоза 1) Покомпонентное изображение переключателя тормоза и его назначение При нажатии педали тормоза
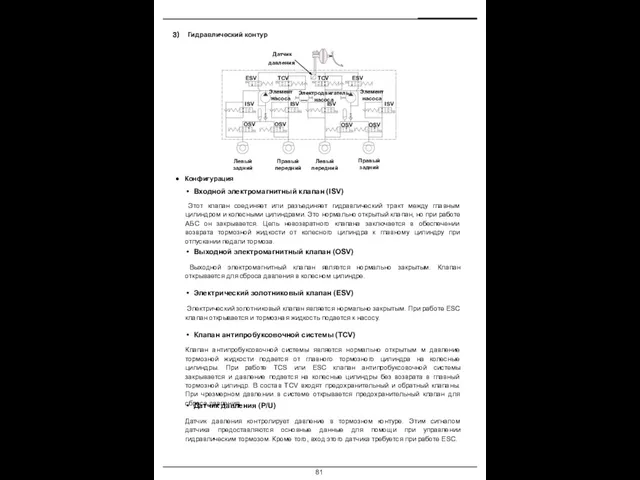
- 80. 2.7 HECU ESC Обзор HECU ESC состоит из блока гидравлического управления (HCU), который управляет гидравлическим давлением,
- 81. Гидравлический контур Датчик давления ESV TCV TCV ESV Элемент насоса Элемент насоса Электродвигатель насоса ISV ISV
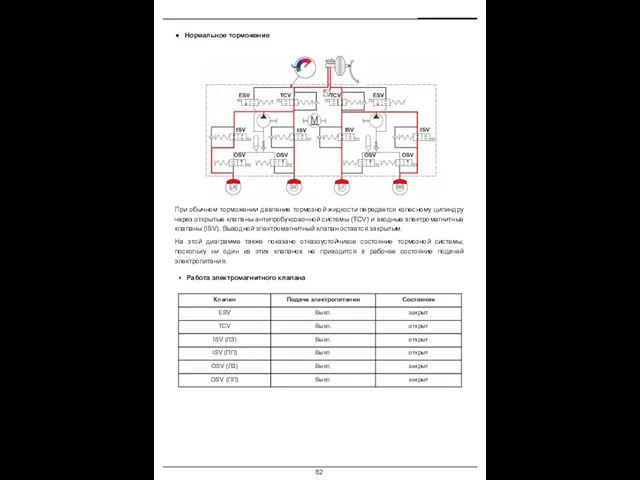
- 82. Нормальное торможение Работа электромагнитного клапана При обычном торможении давление тормозной жидкости передается колесному цилиндру через открытые
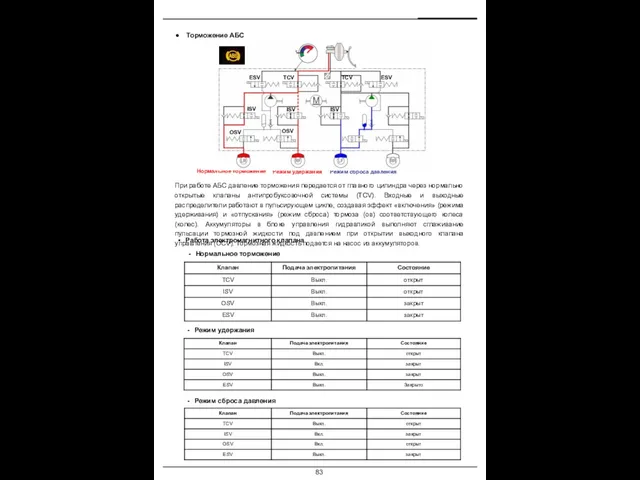
- 83. Торможение АБС Работа электромагнитного клапана При работе АБС давление торможения передается от главного цилиндра через нормально
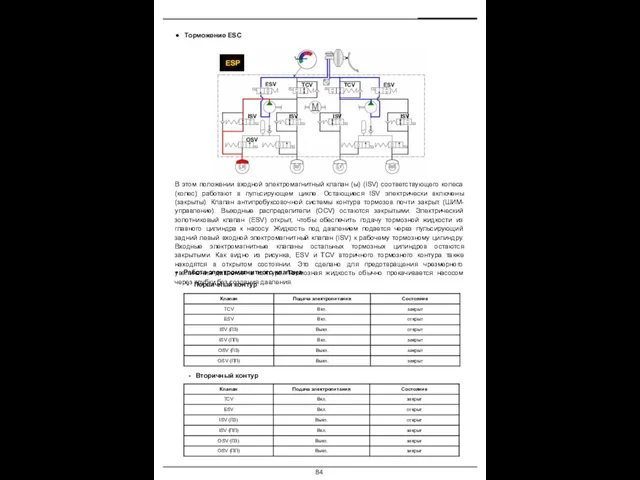
- 84. Торможение ESC Работа электромагнитного клапана В этом положении входной электромагнитный клапан (ы) (ISV) соответствующего колеса (колес)
- 85. 2.8 Индикаторные и сигнальные лампы Обзор HECU ESC включает индикаторные и сигнальные лампы для проверки состояния
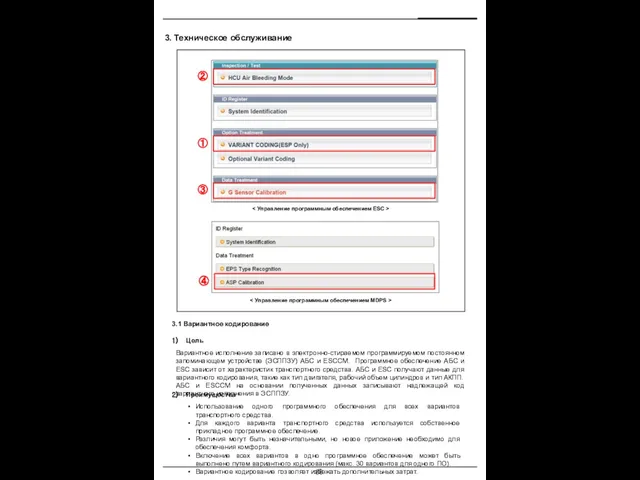
- 86. 3. Техническое обслуживание 3.1 Вариантное кодирование Вариантное исполнение записано в электронно-стираемом программируемом постоянном запоминающем устройстве (ЭСППЗУ)
- 87. 3.2 Стравливание воздуха HECU Прокачка для удаления воздуха из HECU позволяет предотвратить образование паровой пробки («мягкий»
- 88. Использование оборудования (GDS) Подготовить необходимое оборудование. Подключить шнур питания к штепсельной розетке, затем включить питание (электрический
- 89. 3.4 Калибровка датчика ускорения Для обеспечения правильного функционирования системы помощи при подъеме по склону (HAC) и
- 91. Модуль 4. EPB (электрический стояночный тормоз) 1. Обзор 1.1 Введение 1.2 Сравнение типов EPB 2. Схема
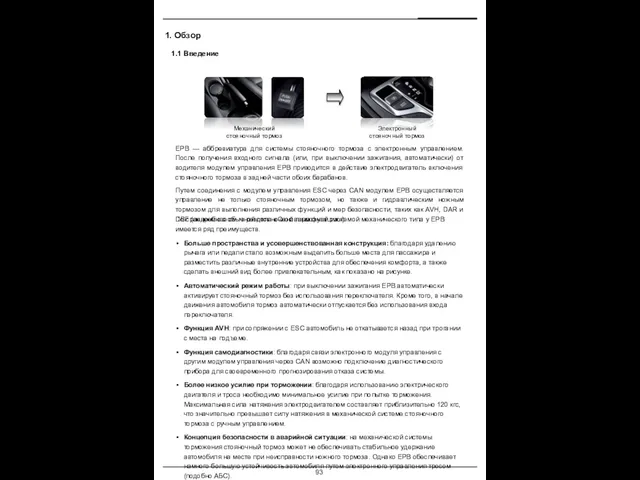
- 93. 1. Обзор 1.1 Введение EPB — аббревиатура для системы стояночного тормоза с электронным управлением. После получения
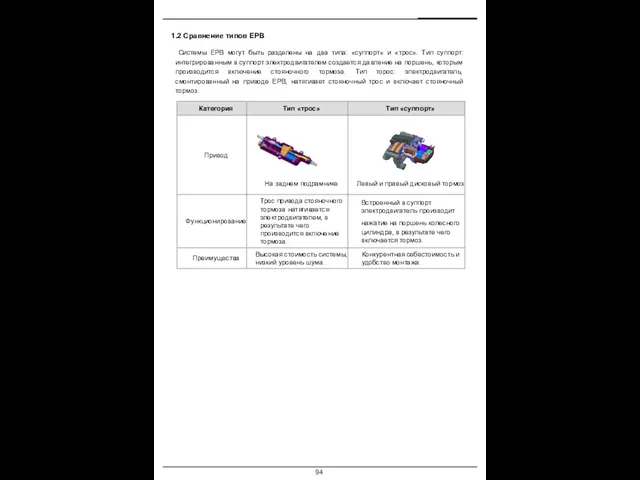
- 94. 1.2 Сравнение типов EPB Системы EPB могут быть разделены на два типа: «суппорт» и «трос». Тип
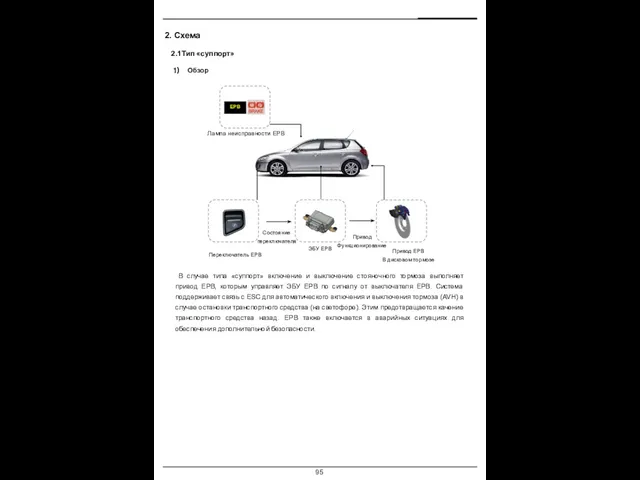
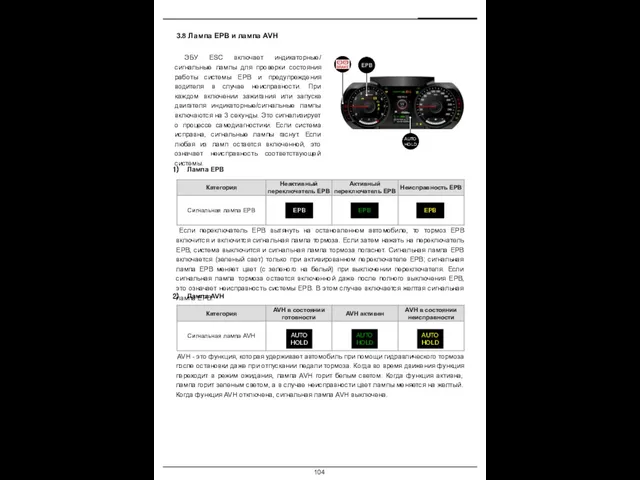
- 95. 2. Схема 2.1Тип «суппорт» В случае типа «суппорт» включение и выключение стояночного тормоза выполняет привод EPB,
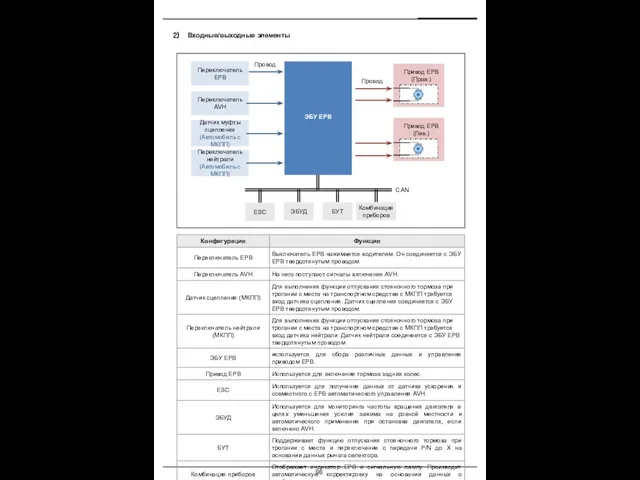
- 96. Входные/выходные элементы
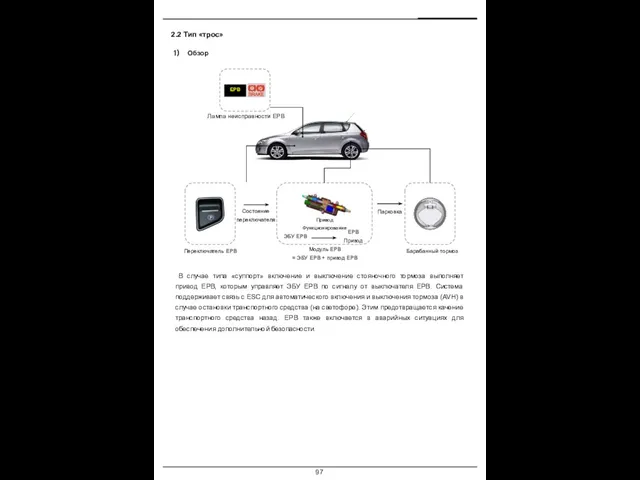
- 97. 2.2 Тип «трос» В случае типа «суппорт» включение и выключение стояночного тормоза выполняет привод EPB, которым
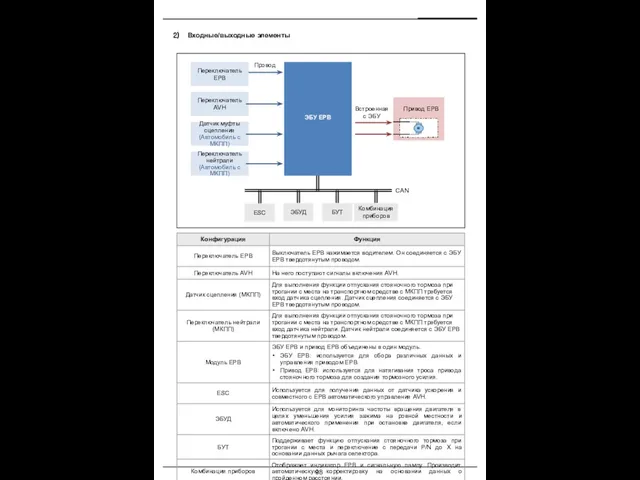
- 98. Входные/выходные элементы
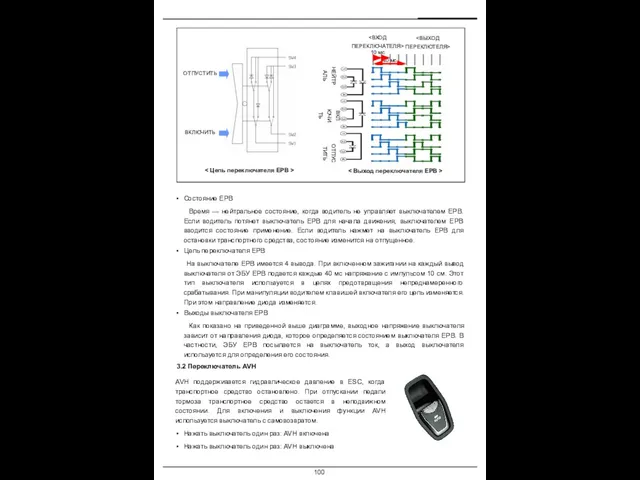
- 99. 3. Компоненты 3.1 Переключатель EPB Потянуть → Включить Нажать → Отпустить Переключатель EPB используется для передачи
- 100. Цепь переключателя EPB На выключателе EPB имеется 4 вывода. При включенном зажигании на каждый вывод выключателя
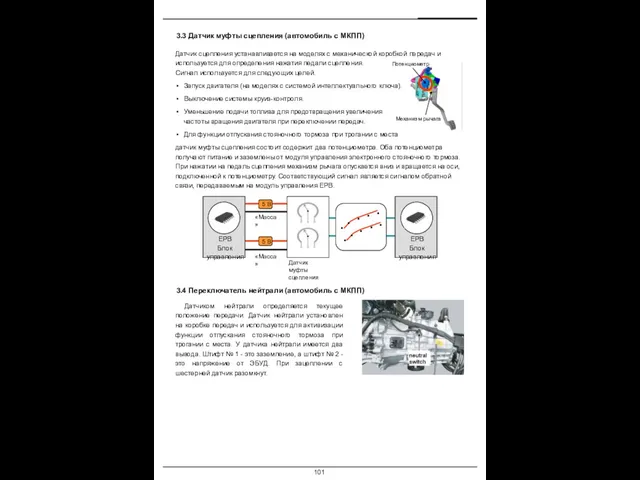
- 101. Датчик сцепления устанавливается на моделях с механической коробкой передач и используется для определения нажатия педали сцепления.
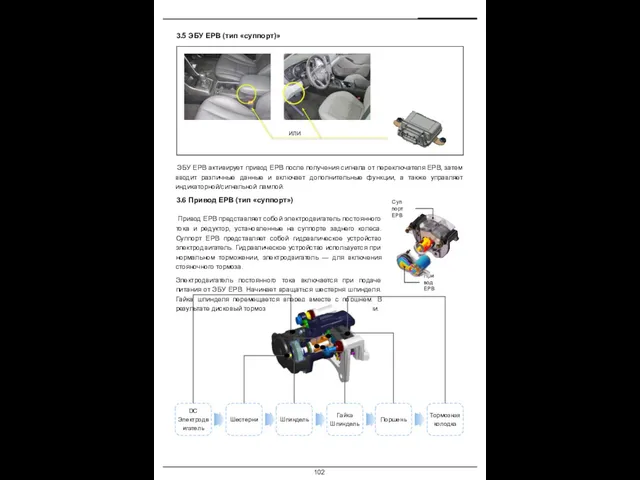
- 102. 3.5 ЭБУ EPB (тип «суппорт)» ЭБУ EPB активирует привод EPB после получения сигнала от переключателя EPB,
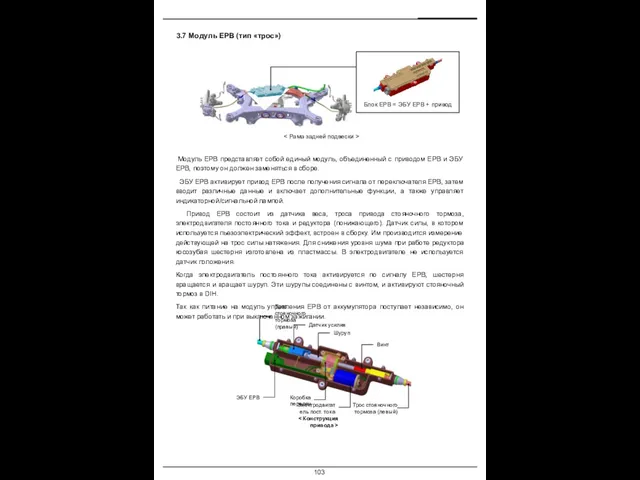
- 103. 3.7 Модуль EPB (тип «трос») Блок EPB = ЭБУ EPB + привод Модуль EPB представляет собой
- 104. 3.8 Лампа EPB и лампа AVH AUTO HOLD AUTO HOLD AUTO HOLD Лампа EPB Лампа AVH
- 105. 3.9 Сообщения на комбинации приборов, связанные с EPB и AVH Состояние систем EPB и AVH и
- 106. 4. Функция 4.1 Функции EPB Система EPB включает различные вспомогательные функции для большего комфорта водителя и
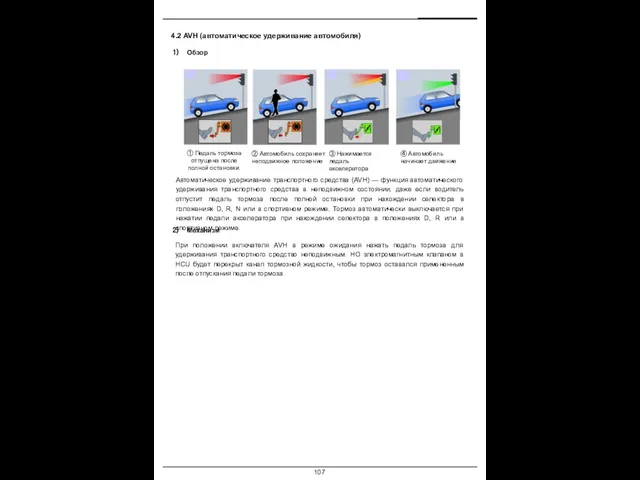
- 107. 4.2 AVH (автоматическое удерживание автомобиля) Обзор Механизм Автоматическое удерживание транспортного средства (AVH) — функция автоматического удерживания
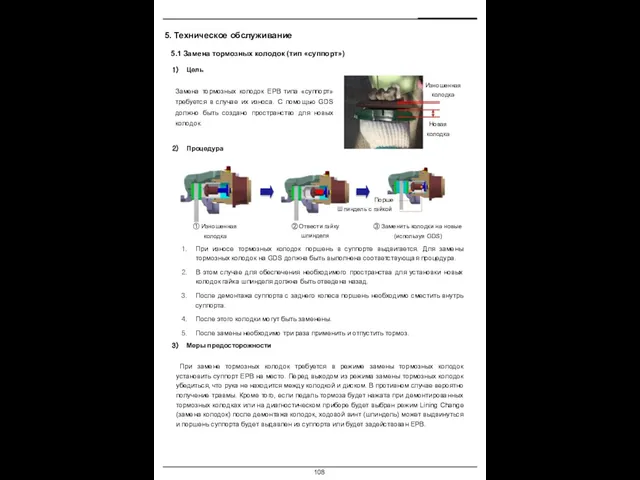
- 108. 5. Техническое обслуживание 5.1 Замена тормозных колодок (тип «суппорт») При износе тормозных колодок поршень в суппорте
- 109. 5.2 ПРИРАБОТКА (тип «трос») Переход в режим ПРИРАБОТКИ Процедура ПРИРАБОТКИ Цель Процедура Запустить двигатель при удерживаемой
- 110. 5.3 Действия после замены привода в сборе (тип «трос») Новый привод EPB в сборе, изготовленный Hyundai
- 112. Модуль 5. MDPS (электроусилитель рулевого управления) 1. Обзор 1.1 Введение 1.2 История 1.3 Классификация по местоположению
- 114. 1. Обзор 1.1 Введение MDPS управляет электродвигателем в зависимости от условий работы рулевого привода, обеспечивая тем
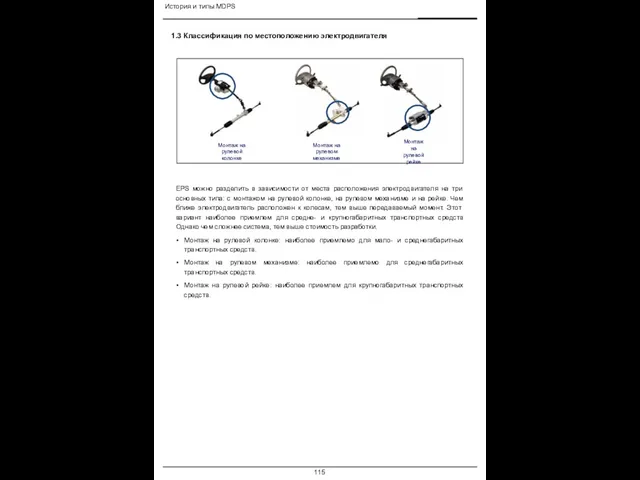
- 115. История и типы MDPS EPS можно разделить в зависимости от места расположения электродвигателя на три основных
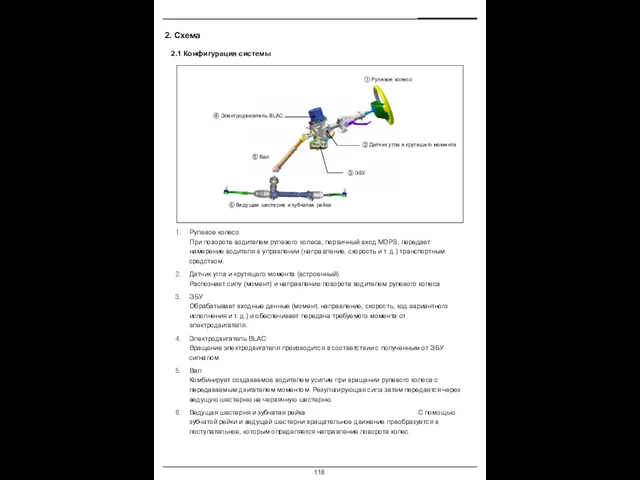
- 116. 2. Схема 2.1 Конфигурация системы Рулевое колесо При повороте водителем рулевого колеса, первичный вход MDPS, передает
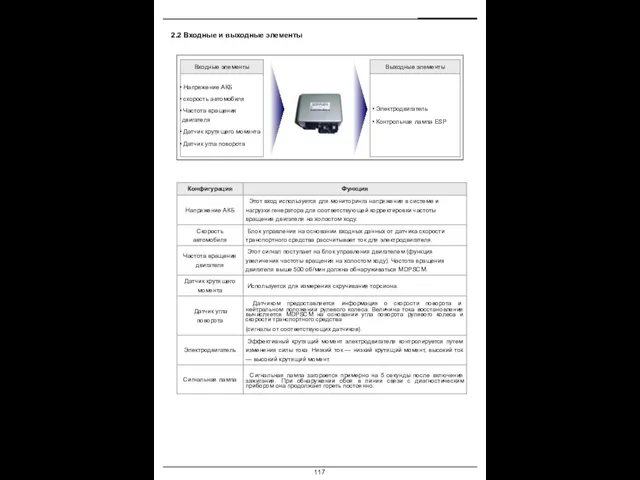
- 117. 2.2 Входные и выходные элементы
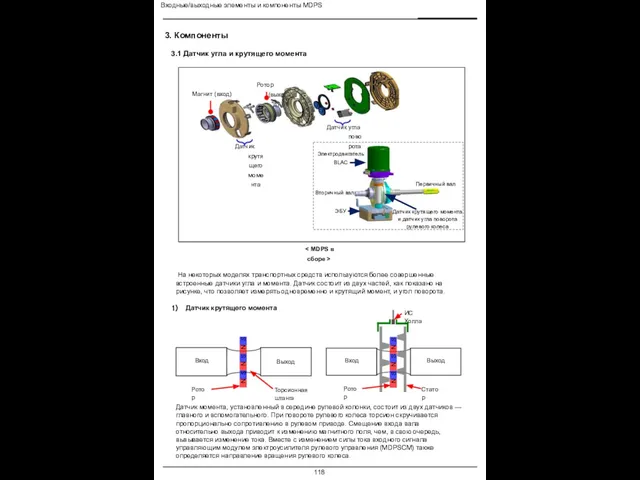
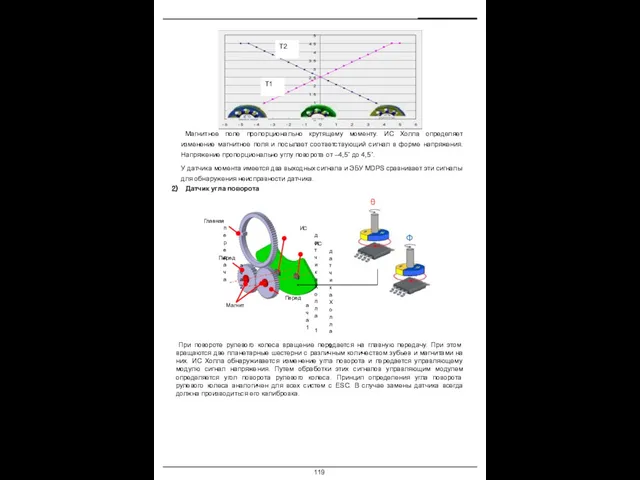
- 118. Входные/выходные элементы и компоненты MDPS 3. Компоненты 3.1 Датчик угла и крутящего момента Датчик крутящего момента
- 119. Магнитное поле пропорционально крутящему моменту. ИС Холла определяет изменение магнитное поля и посылает соответствующий сигнал в
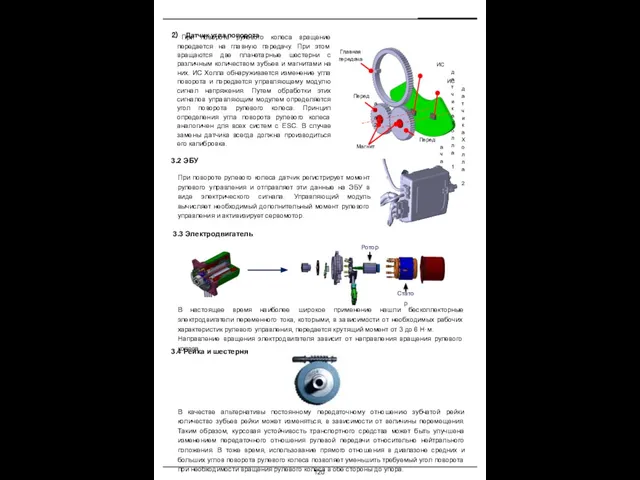
- 120. Датчик угла поворота При повороте рулевого колеса вращение передается на главную передачу. При этом вращаются две
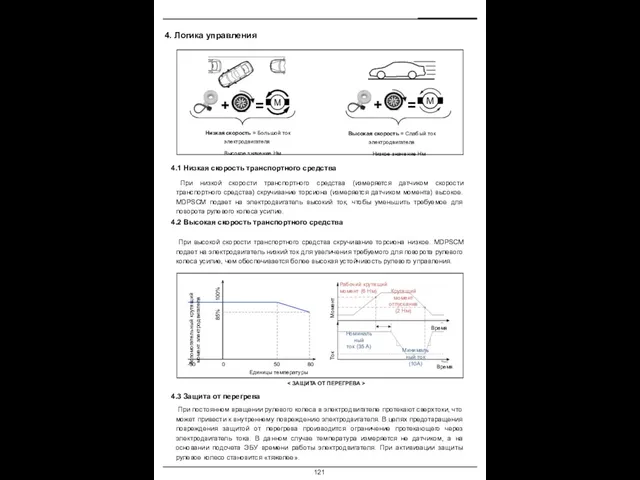
- 121. 4. Логика управления 4.1 Низкая скорость транспортного средства При низкой скорости транспортного средства (измеряется датчиком скорости
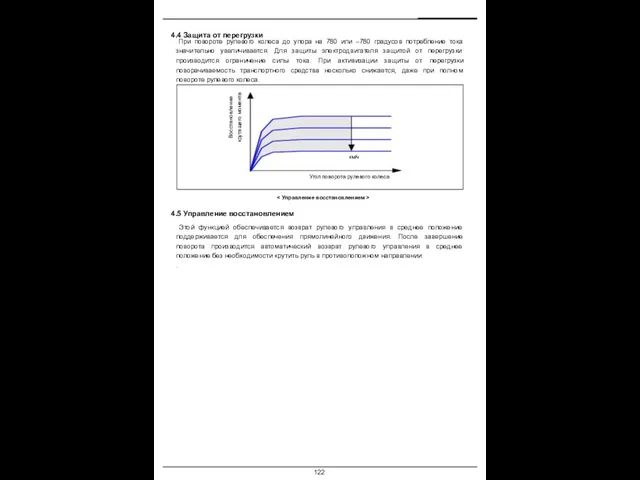
- 122. 4.4 Защита от перегрузки При повороте рулевого колеса до упора на 780 или –780 градусов потребление
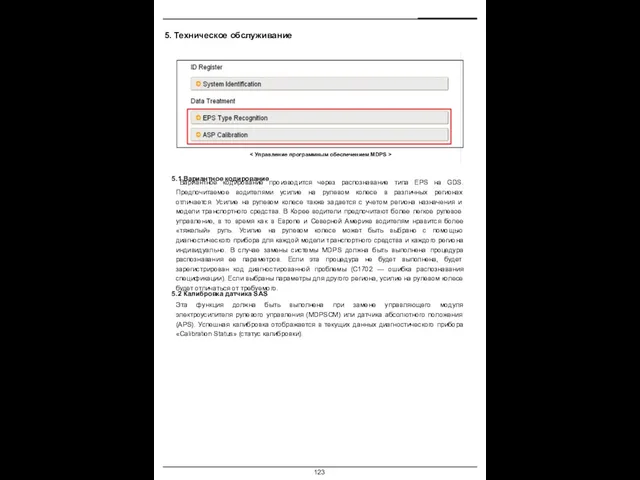
- 123. 5. Техническое обслуживание 5.1 Вариантное кодирование Вариантное кодирование производится через распознавание типа EPS на GDS. Предпочитаемое
- 125. Модуль 6. ECS (Подвеска с электронным управлением) 1. Обзор 1.1 Введение 1.2 История 2. Пневматическая подвеска
- 127. 1. Обзор 1.1 Введение Подвеска с электронным управлением (ECS) была разработана с целью обеспечения комфорта и
- 128. 1.2 История Имеется два типа ECS: подвеска с электронным управлением и пневматическая подвеска с электронным управлением.
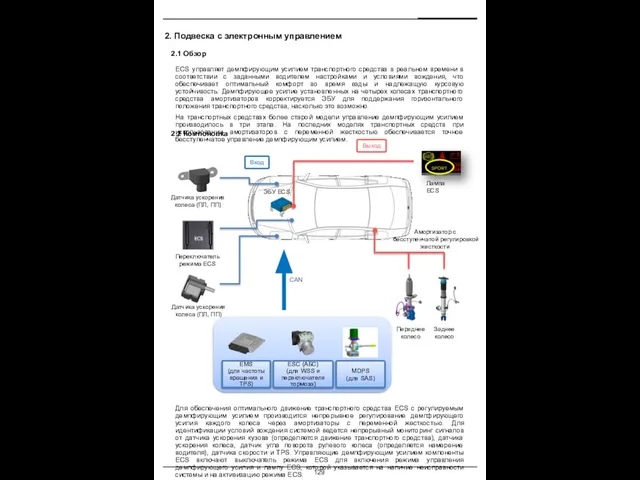
- 129. 2. Подвеска с электронным управлением 2.1 Обзор ECS управляет демпфирующим усилием транспортного средства в реальном времени
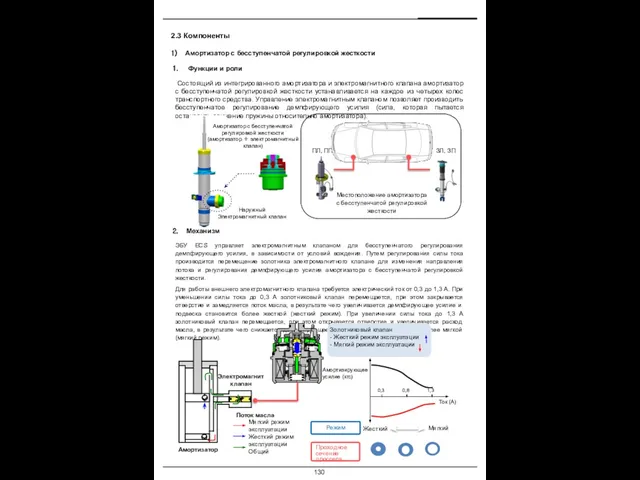
- 130. 2.3 Компоненты Амортизатор с бесступенчатой регулировкой жесткости Состоящий из интегрированного амортизатора и электромагнитного клапана амортизатор с
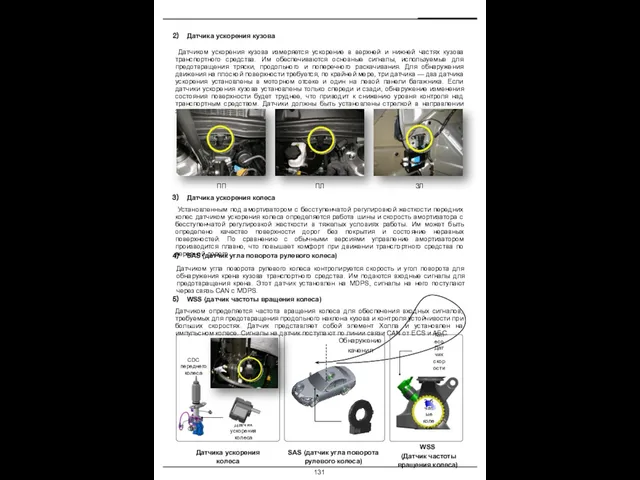
- 131. Датчика ускорения кузова Датчиком ускорения кузова измеряется ускорение в верхней и нижней частях кузова транспортного средства.
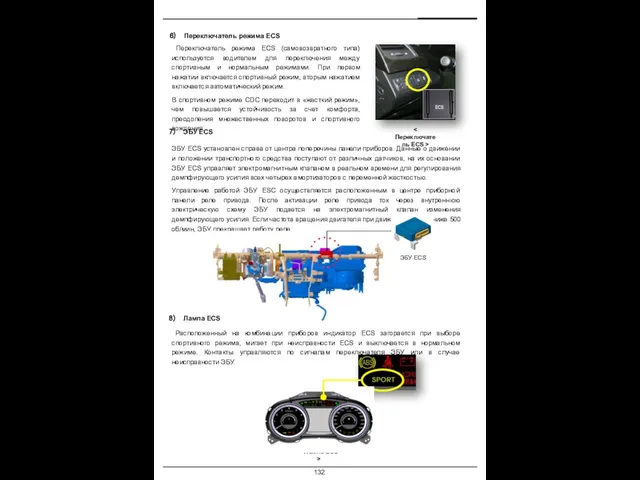
- 132. ЭБУ ECS ЭБУ ECS установлен справа от центра поперечины панели приборов. Данные о движении и положении
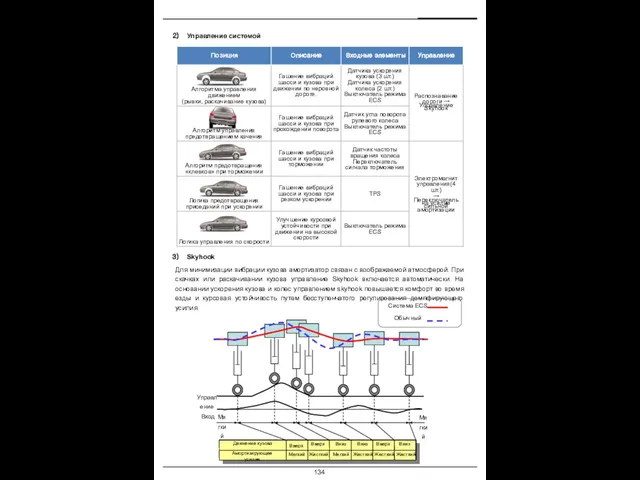
- 133. 2.4 Управление Входные и выходные элементы Провод Провод CAN ЭБУ ECS Датчик ускорения корпуса (ПЛ, ПП,
- 134. Управление системой Управление Вход Движение кузова Вверх Вверх Вниз Вниз Вверх Вниз Амортизирующее усилие Мягкий Жесткий
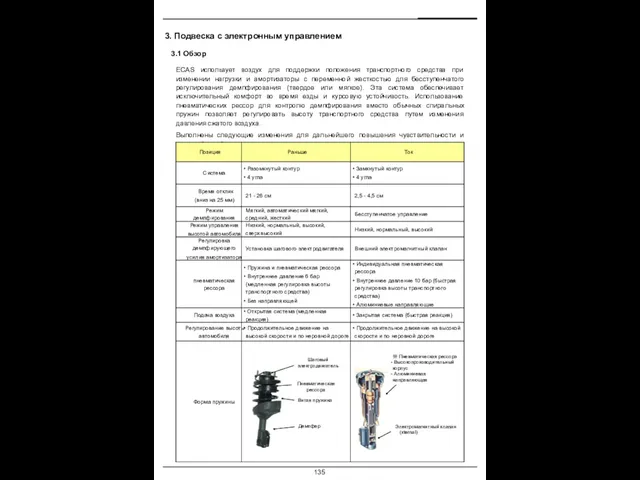
- 135. 3. Подвеска с электронным управлением 3.1 Обзор ECAS использует воздух для поддержки положения транспортного средства при
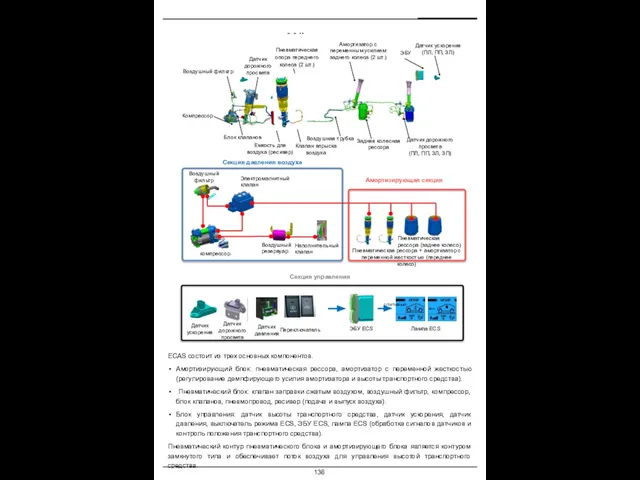
- 136. 3.2 Компоновка Компрессор ЭБУ Емкость для воздуха (ресивер) Амортизатор с переменным усилием заднего колеса (2 шт.)
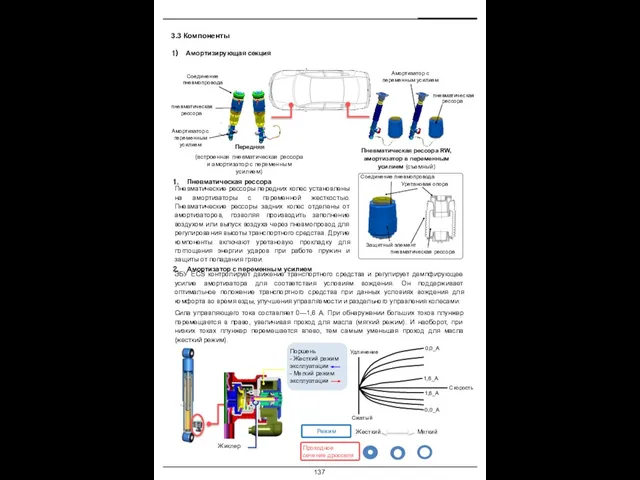
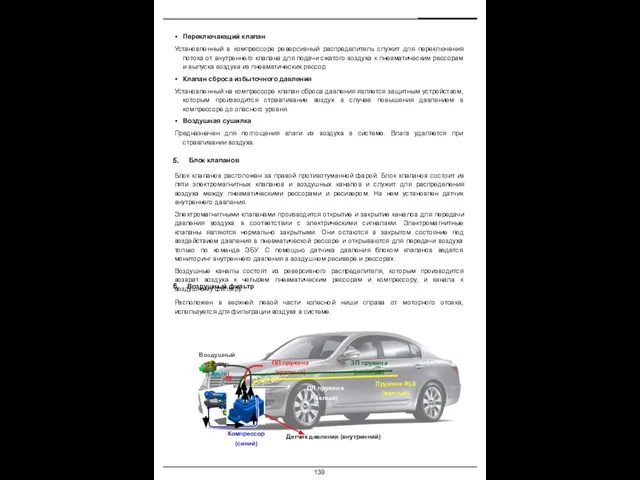
- 137. 3.3 Компоненты Амортизирующая секция Пневматическая рессора Пневматические рессоры передних колес установлены на амортизаторы с переменной жесткостью.
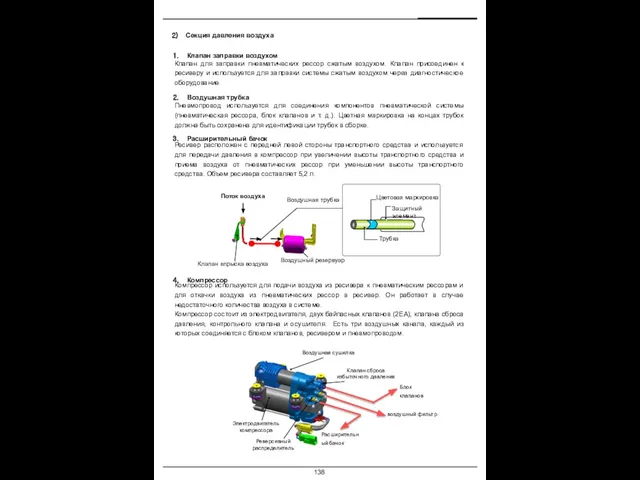
- 138. Секция давления воздуха Клапан для заправки пневматических рессор сжатым воздухом. Клапан присоединен к ресиверу и используется
- 139. Переключающий клапан Установленный в компрессоре реверсивный распределитель служит для переключения потока от внутреннего клапана для подачи
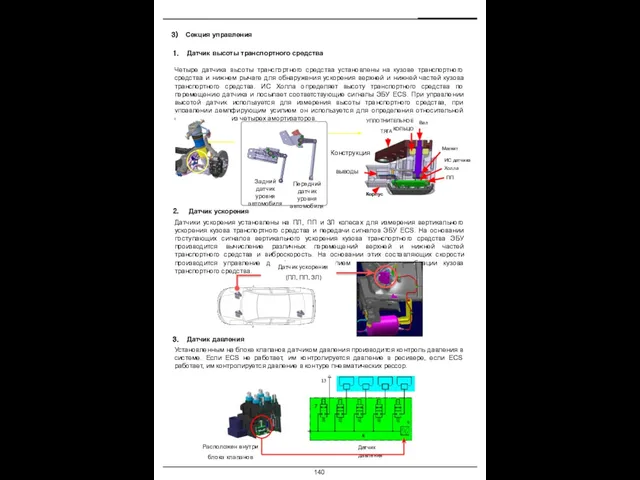
- 140. Секция управления Четыре датчика высоты транспортного средства установлены на кузове транспортного средства и нижнем рычаге для
- 141. Четыре датчика высоты транспортного средства установлены на кузове транспортного средства и нижнем рычаге для определения высоты
- 142. 3.4 Управление Входные и выходные элементы ЭБУ ECS определяет движение транспортного средства по сигналам от датчика
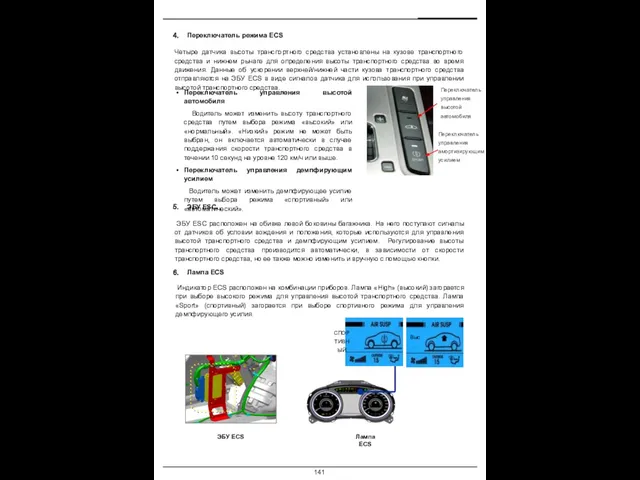
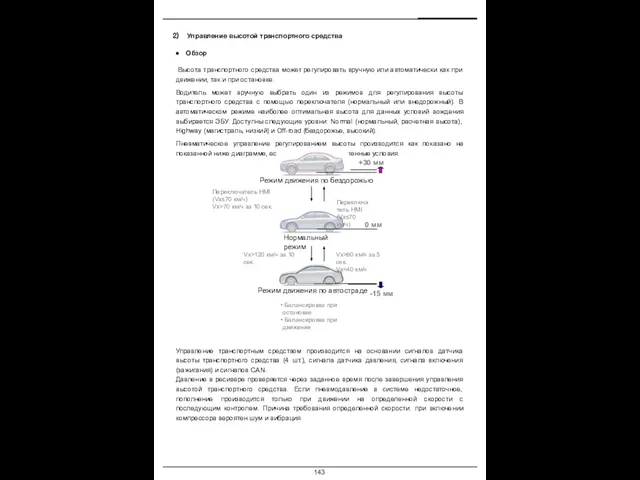
- 143. Управление высотой транспортного средства Высота транспортного средства может регулировать вручную или автоматически как при движении, так
- 144. Управление транспортным средством производится в различных рабочих режимах ЭБУ. Уровни режима работы Спящий режим В спящем
- 145. Контроль демпфирования Обзор Кузов движущегося транспортного средства постоянно вибрирует в результате контакта с (неравным) дорожным покрытием,
- 146. Управление системой подачи воздуха Пневматический контур состоит из компрессора, блока клапанов, ресивера и четырех пневматических рессор.
- 147. Увеличение дорожного просвета При увеличении высоты транспортного средства запускается электродвигатель в компрессоре для подачи воздуха из
- 148. 4. Техническое обслуживание (для ECAS) 4.1 Меры предосторожности при обращении с различными деталями Задняя рессора Недопустимо
- 149. Воздушная трубка Меры предосторожности при техническом обслуживании пневмопровода Разборка пневмопровода Сборка пневмопровода Соблюдать осторожность для предотвращения
- 150. 4.2 Заполнение воздухом Цель После замены работающих под давлением компонентов пневматической подвески (пневматическая рессора, компрессор и
- 151. Порядок работы Подключить входную соединительную муфту к соединительной детали на входе. Соединить заводскую соединительную муфту с
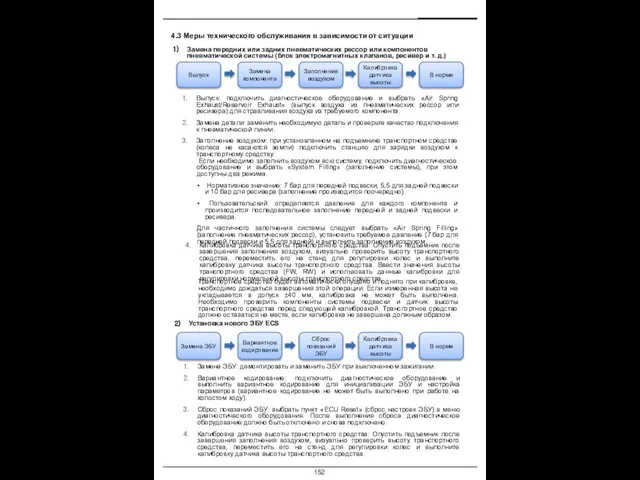
- 152. 4.3 Меры технического обслуживания в зависимости от ситуации Выпуск: подключить диагностическое оборудование и выбрать «Air Spring
- 153. Меры предосторожности при подъеме (автомобили, введенные в эксплуатацию) Необходимо отбуксировать транспортное средство на станцию технического обслуживания,
- 155. Модуль 7. TPMS (систем контроля давления в шинах) Обзор 1.1 Введение 1.2 Сравнение нормативных требований Европейского
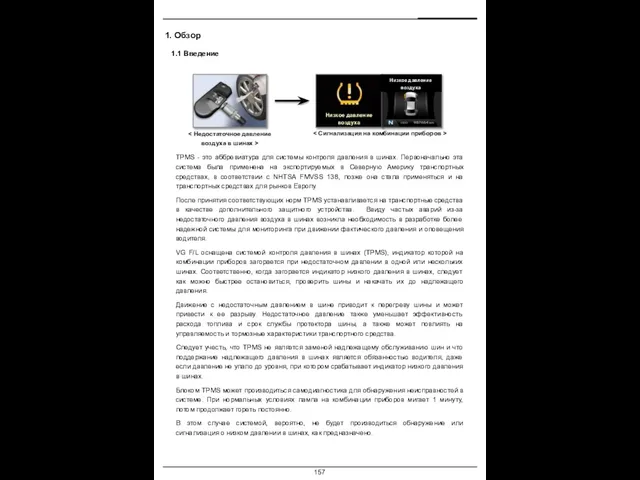
- 157. 1. Обзор 1.1 Введение TPMS - это аббревиатура для системы контроля давления в шинах. Первоначально эта
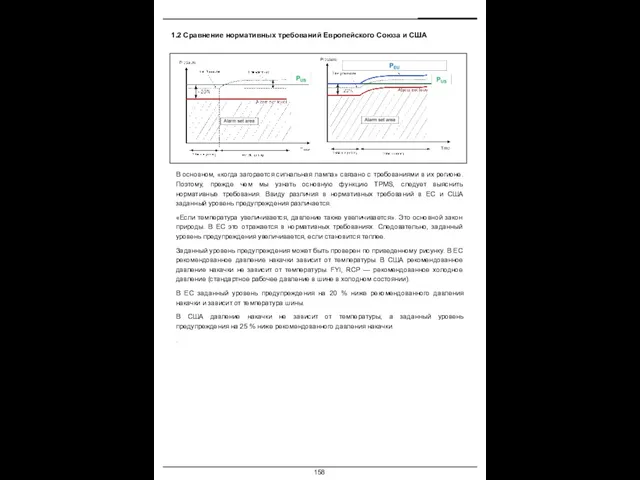
- 158. В основном, «когда загорается сигнальная лампа» связано с требованиями в их регионе. Поэтому, прежде чем мы
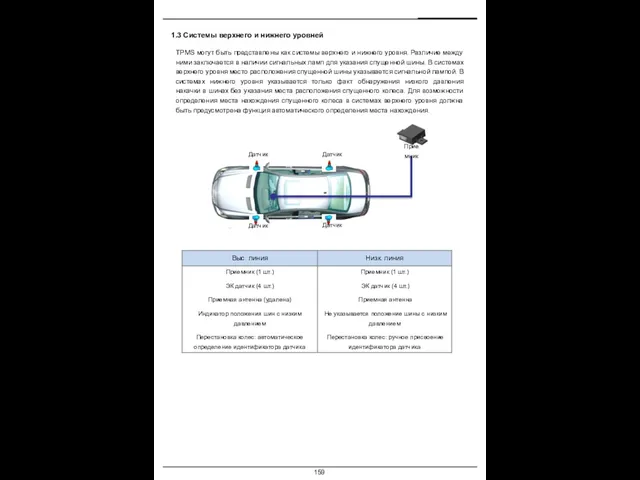
- 159. 1.3 Системы верхнего и нижнего уровней TPMS могут быть представлены как системы верхнего и нижнего уровня.
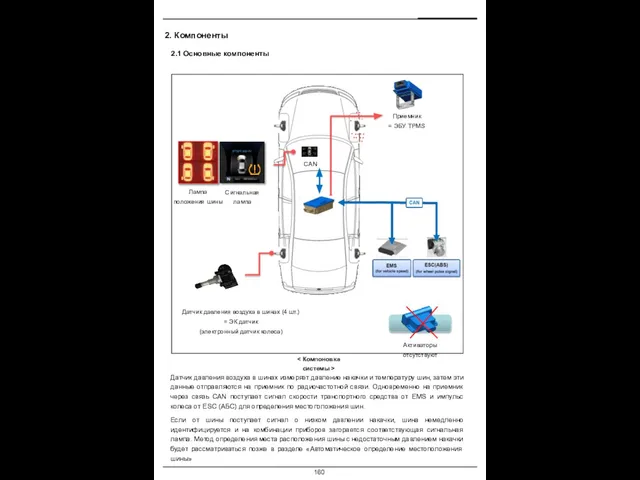
- 160. 2. Компоненты 2.1 Основные компоненты CAN Приемник = ЭБУ TPMS Датчик давления воздуха в шинах (4
- 161. 2.2 Датчик давления воздуха в шинах (ЭК датчик) Покомпонентное изображение датчика колеса и его назначение Датчик
- 162. 2.3 Ресивер Покомпонентное изображение приемника и его назначение На приемник поступают РЧ сигналы (315 МГц) от
- 163. 2.4 Сигнальная лампа и лампа положения Сигнальная лампа для низкого давления Лампа положения Используется только в
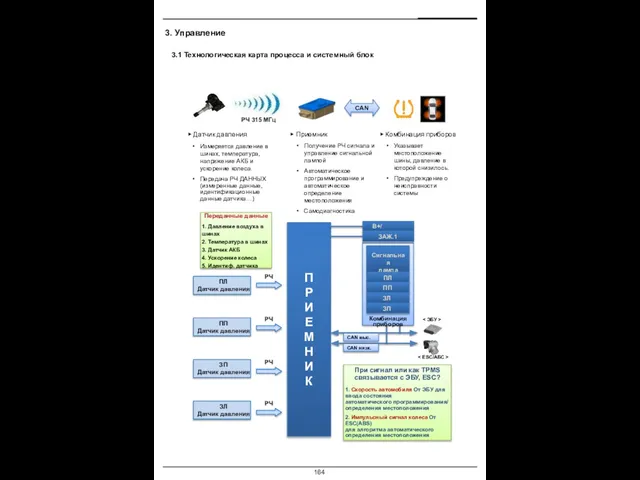
- 164. 3. Управление 3.1 Технологическая карта процесса и системный блок CAN РЧ 315 МГц Указывает местоположение шины,
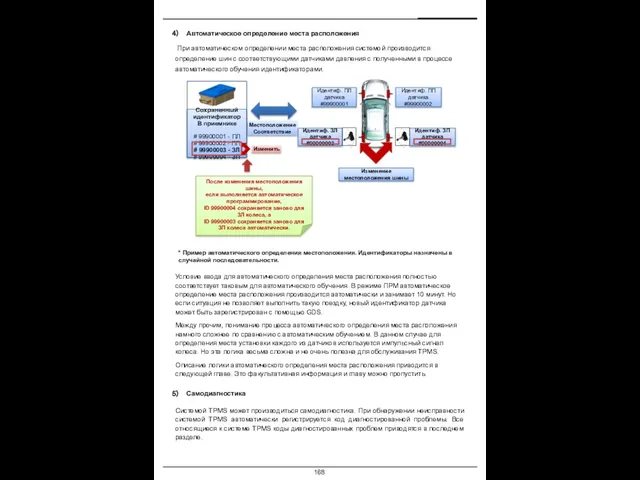
- 165. 3.2 Основное назначение (TPMS верхнего уровня для Северной Америки) Обнаружение недостаточного давления Большинством основных функций TPMS
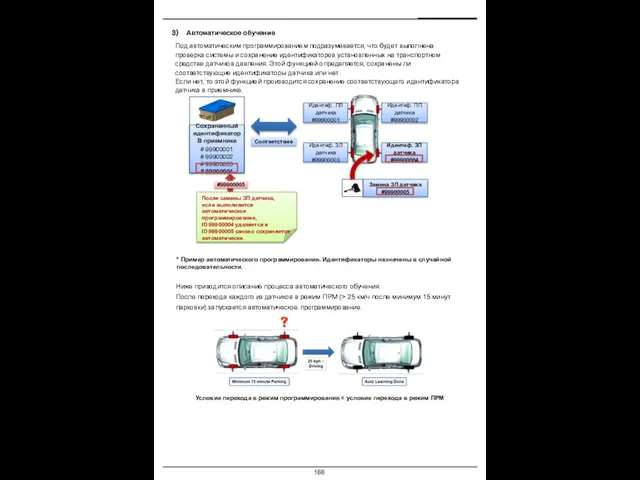
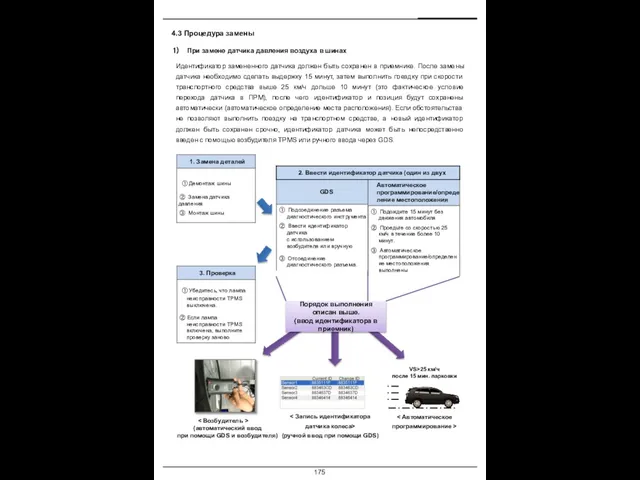
- 166. Автоматическое обучение Под автоматическим программированием подразумевается, что будет выполнена проверка системы и сохранение идентификаторов установленных на
- 167. При замене датчика очень удобно выполнить регистрацию нового идентификатора датчика в приемнике путем автоматического обучения. Все
- 168. Автоматическое определение места расположения При автоматическом определении места расположения системой производится определение шин с соответствующими датчиками
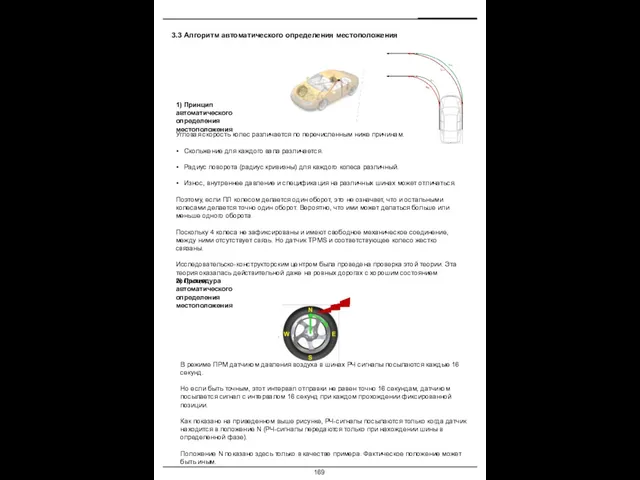
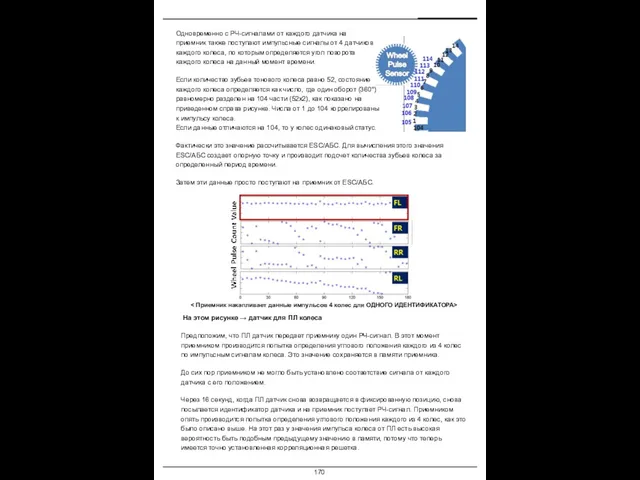
- 169. 3.3 Алгоритм автоматического определения местоположения Угловая скорость колес различается по перечисленным ниже причинам. Скольжение для каждого
- 170. Одновременно с РЧ-сигналами от каждого датчика на приемник также поступают импульсные сигналы от 4 датчиков каждого
- 171. Так как остальными колесами (ПП, ЗЛ, ЗП) делается меньше или больше одного оборота и у них
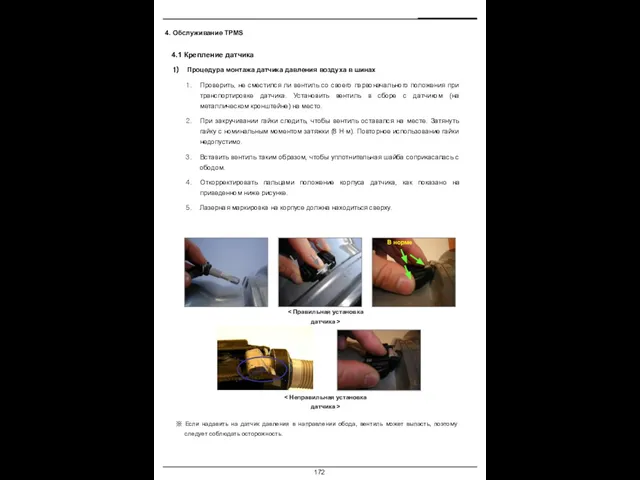
- 172. 4. Обслуживание TPMS 4.1 Крепление датчика Проверить, не сместился ли вентиль со своего первоначального положения при
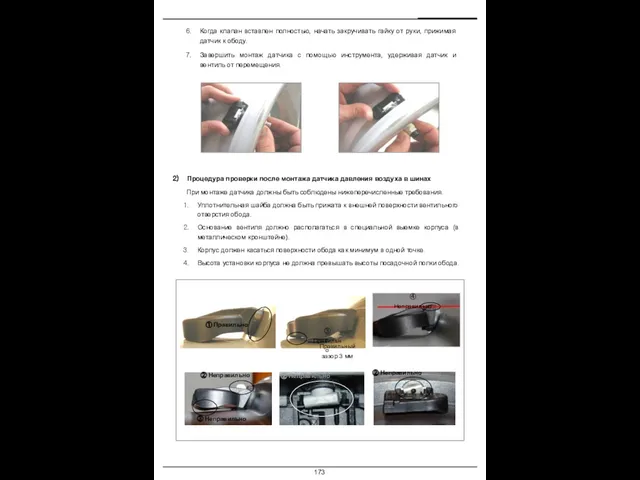
- 173. Когда клапан вставлен полностью, начать закручивать гайку от руки, прижимая датчик к ободу. Завершить монтаж датчика
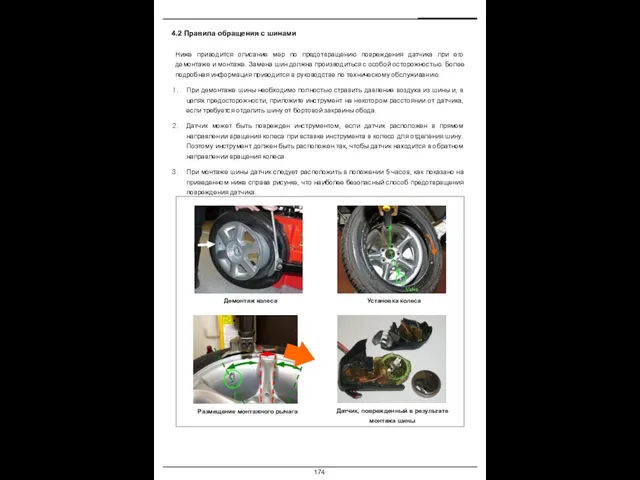
- 174. 4.2 Правила обращения с шинами Ниже приводится описание мер по предотвращению повреждения датчика при его демонтаже
- 175. 4.3 Процедура замены При замене датчика давления воздуха в шинах Идентификатор замененного датчика должен быть сохранен
- 176. При замене приемника TPMS Приемник A/S должен быть переведен из чистого режима в нормальный режим. Сигнальная
- 178. Скачать презентацию
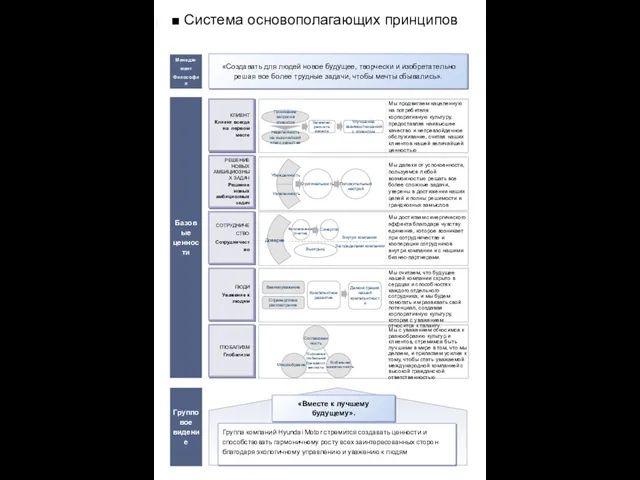
■ Система основополагающих принципов
Группа компаний Hyundai Motor стремится создавать ценности
■ Система основополагающих принципов
Группа компаний Hyundai Motor стремится создавать ценности

Обзор группы и отрасли промышленности
■ Обзор группы компаний Hyundai Motor
*
Обзор группы и отрасли промышленности
■ Обзор группы компаний Hyundai Motor
*
Содержание
Содержание

Модуль 1. АКПП (автоматическая коробка
передач)
Цель
обучения
1. Обзор
1.1 Введение
Модуль 1. АКПП (автоматическая коробка
передач)
Цель
обучения
1. Обзор
1.1 Введение
1. Обзор
1.1 Введение
Коробка передач (трансмиссия) - это устройство, которое изменяет и
1. Обзор
1.1 Введение
Коробка передач (трансмиссия) - это устройство, которое изменяет и
1.2 Модельный ряд
Для поставки на рынки различных транспортных средств Hyundai
1.2 Модельный ряд
Для поставки на рынки различных транспортных средств Hyundai
Модель: FRA
Это 4-скоростная автоматическая коробка передач с электронным управлением и
Модель: FRA
Это 4-скоростная автоматическая коробка передач с электронным управлением и
1.3 Спецификации
1.3 Спецификации
2. Схема
2.1 Основные особенности
Автоматическая коробка передач состоит из гидротрансформатора, которым
2. Схема
2.1 Основные особенности
Автоматическая коробка передач состоит из гидротрансформатора, которым

2.2 Входные и выходные элементы
Блок управления трансмиссией (БУТ) выполняет обработку полученных
2.2 Входные и выходные элементы
Блок управления трансмиссией (БУТ) выполняет обработку полученных
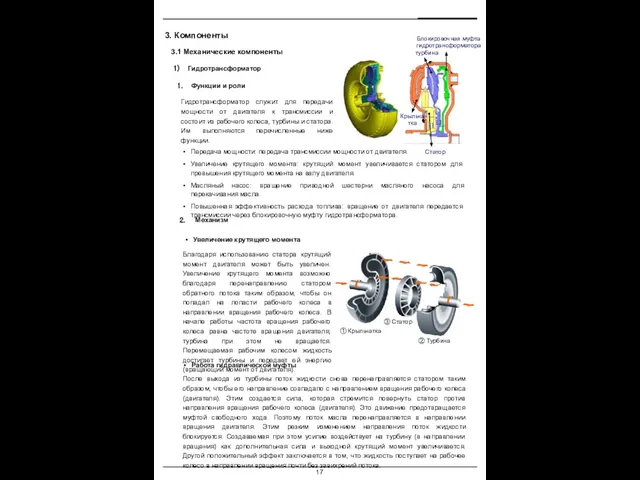
3.1 Механические компоненты
Гидротрансформатор
Функции и роли
Гидротрансформатор служит для передачи мощности от двигателя
3.1 Механические компоненты
Гидротрансформатор
Функции и роли
Гидротрансформатор служит для передачи мощности от двигателя
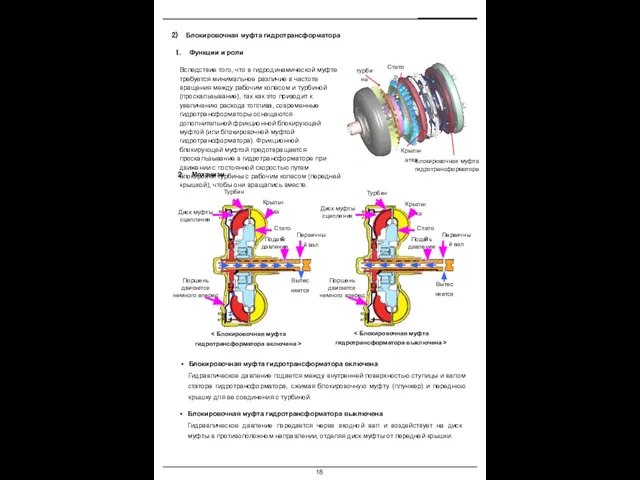
Блокировочная муфта гидротрансформатора
Механизм
Вследствие того, что в гидродинамической муфте требуется минимальное различие
Блокировочная муфта гидротрансформатора
Механизм
Вследствие того, что в гидродинамической муфте требуется минимальное различие
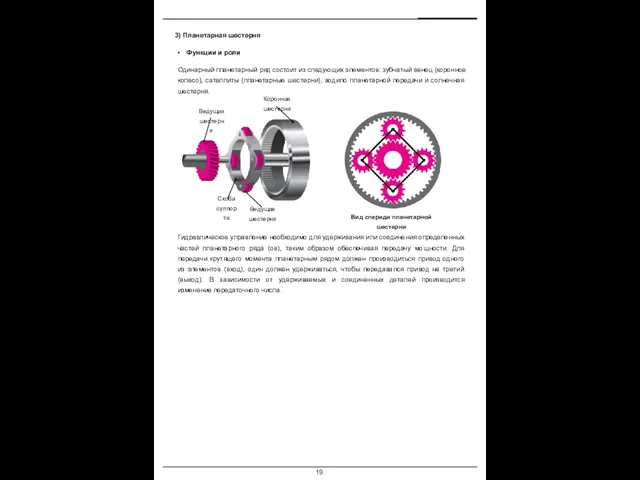
3) Планетарная шестерня
Одинарный планетарный ряд состоит из следующих элементов: зубчатый венец
3) Планетарная шестерня
Одинарный планетарный ряд состоит из следующих элементов: зубчатый венец

4) Тормоз и муфта
Функции и роли
Названиями указываются муфты и тормоза, используемые
4) Тормоз и муфта
Функции и роли
Названиями указываются муфты и тормоза, используемые

Механизм
Многодисковые муфты состоят из барабана, ведомого и ведущего дисков. Ведомые диски
Механизм
Многодисковые муфты состоят из барабана, ведомого и ведущего дисков. Ведомые диски
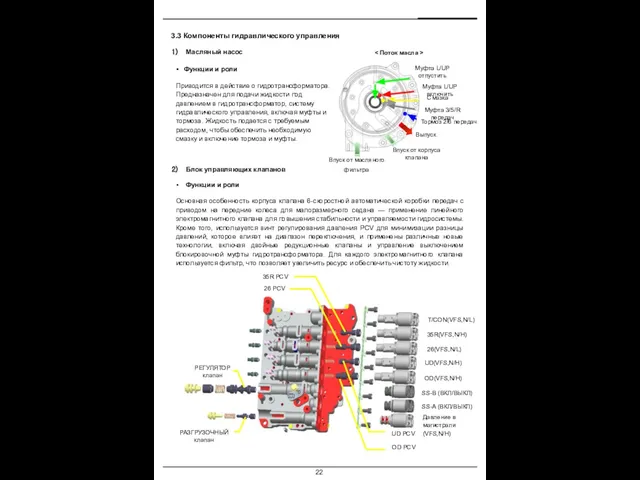
3.3 Компоненты гидравлического управления
Масляный насос
Функции и роли
Приводится в действие о гидротрансформатора.
3.3 Компоненты гидравлического управления
Масляный насос
Функции и роли
Приводится в действие о гидротрансформатора.
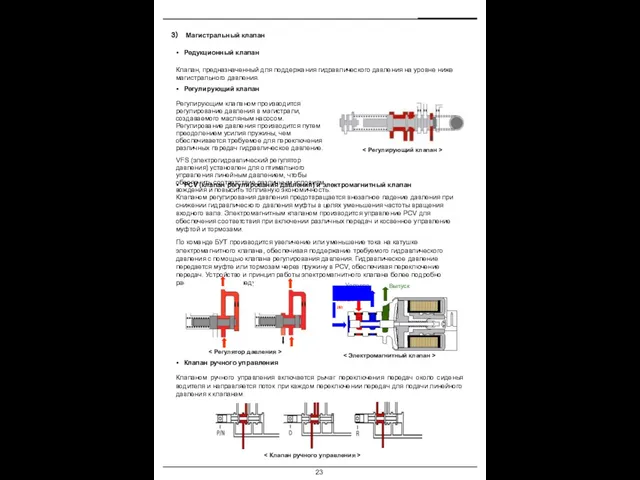
Магистральный клапан
Редукционный клапан
Клапан, предназначенный для поддержания гидравлического давления на уровне ниже
Магистральный клапан
Редукционный клапан
Клапан, предназначенный для поддержания гидравлического давления на уровне ниже
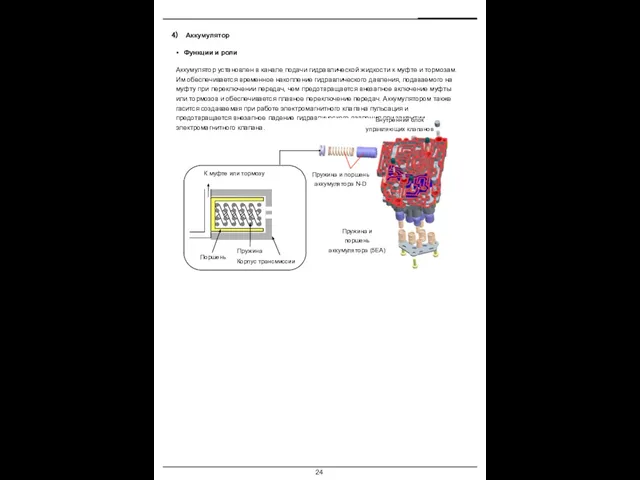
Аккумулятор
Функции и роли
Аккумулятор установлен в канале подачи гидравлической жидкости к муфте
Аккумулятор
Функции и роли
Аккумулятор установлен в канале подачи гидравлической жидкости к муфте

3.3 Входные элементы БУТ
Датчики частоты вращения первичного и вторичного валов
3.3 Входные элементы БУТ
Датчики частоты вращения первичного и вторичного валов
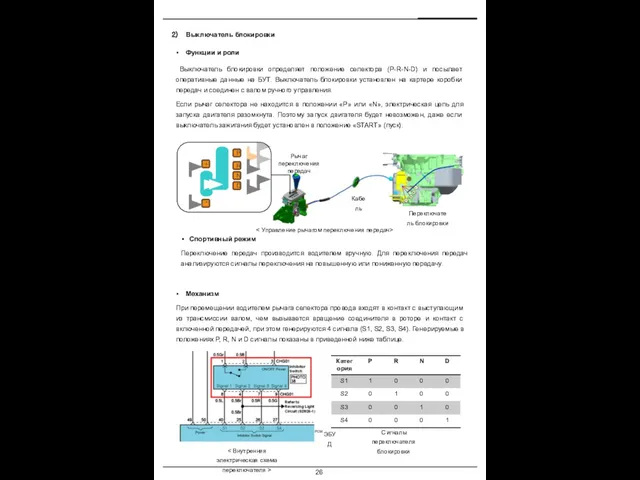
Выключатель блокировки
Функции и роли
Выключатель блокировки определяет положение селектора (P-R-N-D)
Выключатель блокировки
Функции и роли
Выключатель блокировки определяет положение селектора (P-R-N-D)
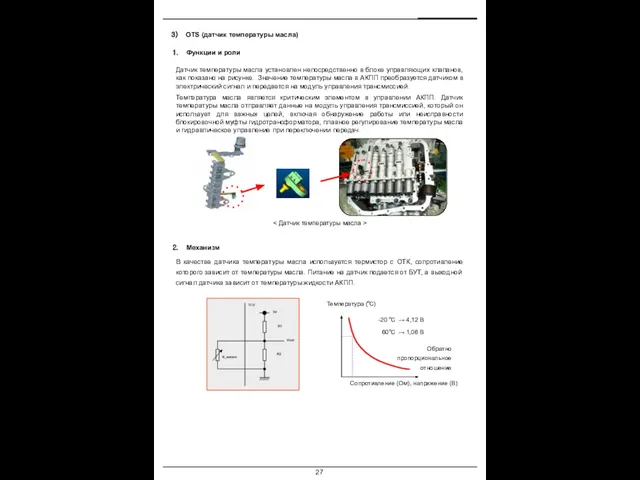
OTS (датчик температуры масла)
Функции и роли
Датчик температуры масла установлен непосредственно в
OTS (датчик температуры масла)
Функции и роли
Датчик температуры масла установлен непосредственно в

Электромагнитный клапан
Функции и роли
Электромагнитный клапан установлен на блоке управляющих
Электромагнитный клапан
Функции и роли
Электромагнитный клапан установлен на блоке управляющих
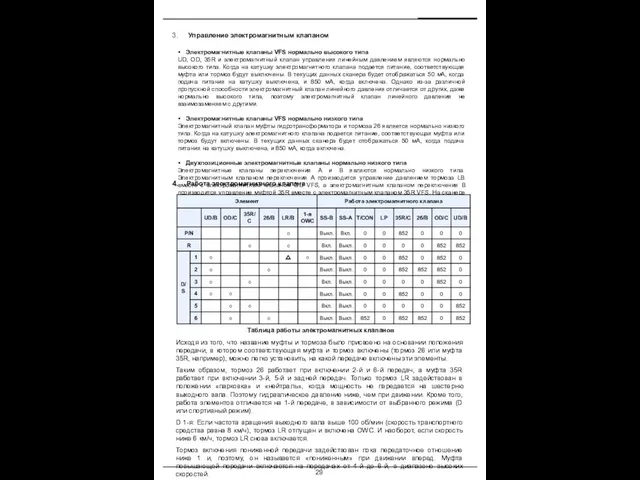
Работа электромагнитного клапана
Исходя из того, что название муфты и тормоза
Работа электромагнитного клапана
Исходя из того, что название муфты и тормоза
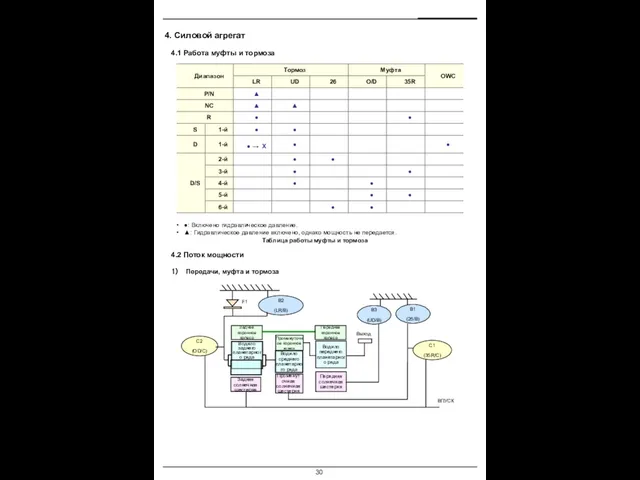
4.1 Работа муфты и тормоза
4. Силовой агрегат
Таблица работы муфты и
4.1 Работа муфты и тормоза
4. Силовой агрегат
Таблица работы муфты и

1-я передача
Схема передачи мощности
: Турбина → Входной вал → Задняя
1-я передача
Схема передачи мощности
: Турбина → Входной вал → Задняя
3-я передача
Схема передачи мощности
Турбина → Входной вал → Задняя солнечная
3-я передача
Схема передачи мощности
Турбина → Входной вал → Задняя солнечная
5-я передача
Схема передачи мощности
Турбина → Входной вал → → Водило
5-я передача
Схема передачи мощности
Турбина → Входной вал → → Водило
5-я передача
Схема передачи мощности
Турбина → Входной вал → Задняя солнечная
5-я передача
Схема передачи мощности
Турбина → Входной вал → Задняя солнечная
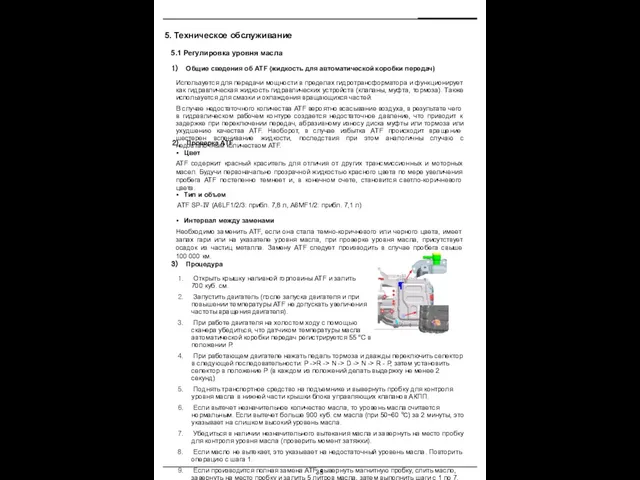
5.1 Регулировка уровня масла
Проверка ATF
5. Техническое обслуживание
Процедура
Открыть крышку наливной горловины
5.1 Регулировка уровня масла
Проверка ATF
5. Техническое обслуживание
Процедура
Открыть крышку наливной горловины
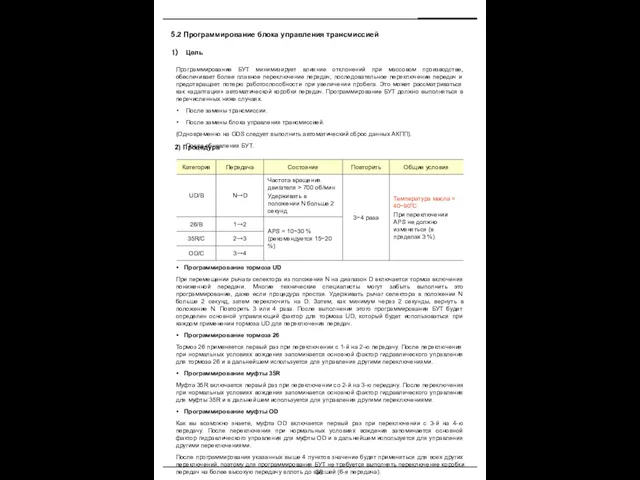
5.2 Программирование блока управления трансмиссией
Программирование БУТ минимизирует влияние отклонений при массовом
5.2 Программирование блока управления трансмиссией
Программирование БУТ минимизирует влияние отклонений при массовом
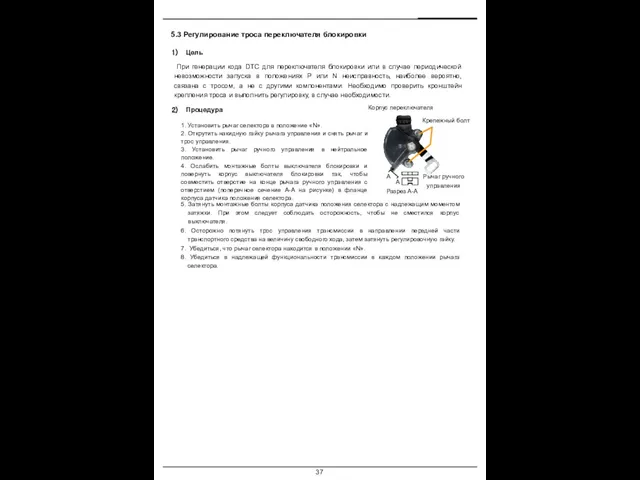
5.3 Регулирование троса переключателя блокировки
При генерации кода DTC для переключателя
5.3 Регулирование троса переключателя блокировки
При генерации кода DTC для переключателя

Модуль 2 4WD (привод на четыре колеса)
1. Обзор
1.1 Введение
1.2
Модуль 2 4WD (привод на четыре колеса)
1. Обзор
1.1 Введение
1.2
1. Обзор
1.1 Введение
Основная причина использования системы полного привода заключается в повышении
1. Обзор
1.1 Введение
Основная причина использования системы полного привода заключается в повышении

1.2 Типы полного привода
Ниже приводится описание некоторых из возможных и наиболее
1.2 Типы полного привода
Ниже приводится описание некоторых из возможных и наиболее
1.3 История создания системы полного привода
EST (селективный полный привод)
TOD (постоянный полный
1.3 История создания системы полного привода
EST (селективный полный привод)
TOD (постоянный полный
2. Компоненты
2.1 Основные компоненты и компоновка системы полного привода
Система полного
2. Компоненты
2.1 Основные компоненты и компоновка системы полного привода
Система полного
2.2 Раздаточная коробка
Раздаточная коробка состоит из входного вала, привод которого производится
2.2 Раздаточная коробка
Раздаточная коробка состоит из входного вала, привод которого производится
Транспортные средства, которые не оборудованы межосевым
дифференциалом, а только межколесными передним
Транспортные средства, которые не оборудованы межосевым
дифференциалом, а только межколесными передним

2. 2.5 ЭБУ полного привода
Блок управления полным приводом на основании сигналов
2. 2.5 ЭБУ полного привода
Блок управления полным приводом на основании сигналов
Когда колеса одной оси начинают вращаться быстрее, например при проскальзывании, набор
Когда колеса одной оси начинают вращаться быстрее, например при проскальзывании, набор
2. 8 Лампа блокировки полного привода и сигнальная лампа
В случае
2. 8 Лампа блокировки полного привода и сигнальная лампа
В случае
3. Управление
3.1 Входные/выходные элементы
ITM (интерактивное управление крутящим моментом), ITCC (интеллектуальная
3. Управление
3.1 Входные/выходные элементы
ITM (интерактивное управление крутящим моментом), ITCC (интеллектуальная
3.2 Режим управления муфтой
Нормальное движение
В нормальном режиме движения большая часть
3.2 Режим управления муфтой
Нормальное движение
В нормальном режиме движения большая часть
4. Сравнение типов систем полного привода
4.1 Сравнение ITM, ITCC и
4. Сравнение типов систем полного привода
4.1 Сравнение ITM, ITCC и

4.2 ITM (интерактивное управление крутящим моментом)
Введение
Переключатель блокировки полного привода
Модуль управления
Раздаточная коробка
4.2 ITM (интерактивное управление крутящим моментом)
Введение
Переключатель блокировки полного привода
Модуль управления
Раздаточная коробка
3) Муфта ITM
Технические характеристики
Обзор
Муфта ITM является основным компонентом системы (наряду с
3) Муфта ITM
Технические характеристики
Обзор
Муфта ITM является основным компонентом системы (наряду с
Компоненты
Компоненты
Работа муфты
При движении с постоянной скоростью, как правило, используется режим привода
Работа муфты
При движении с постоянной скоростью, как правило, используется режим привода

4.3 ITCC (интеллектуальная система распределения крутящего момента)
Введение
Основным назначением всех систем полного
4.3 ITCC (интеллектуальная система распределения крутящего момента)
Введение
Основным назначением всех систем полного
3) Муфта ITСС
Технические характеристики
Обзор
под сиденьем водителя
Муфта ITCC является основным компонентом системы
3) Муфта ITСС
Технические характеристики
Обзор
под сиденьем водителя
Муфта ITCC является основным компонентом системы
Работа муфты
Входной вал муфты ITCC соединен с корпусом муфты. При подаче
Работа муфты
Входной вал муфты ITCC соединен с корпусом муфты. При подаче
4.4 DEHA (прямой электрогидравлический силовой привод)
Введение
Основные компоненты
Раздаточная коробка
ЭБУ полного
4.4 DEHA (прямой электрогидравлический силовой привод)
Введение
Основные компоненты
Раздаточная коробка
ЭБУ полного
Муфта ITCC
Технические характеристики
Обзор
ЭБУ системы полного привода анализирует входные сигналы, то есть
Муфта ITCC
Технические характеристики
Обзор
ЭБУ системы полного привода анализирует входные сигналы, то есть
Работа муфты
При движении транспортного средства по линии связи CAN поступают входные
Работа муфты
При движении транспортного средства по линии связи CAN поступают входные
5. Техническое обслуживание
5.1 Буксировка полноприводных автомобилей
Лучшим способом буксировки транспортного средства с
5. Техническое обслуживание
5.1 Буксировка полноприводных автомобилей
Лучшим способом буксировки транспортного средства с
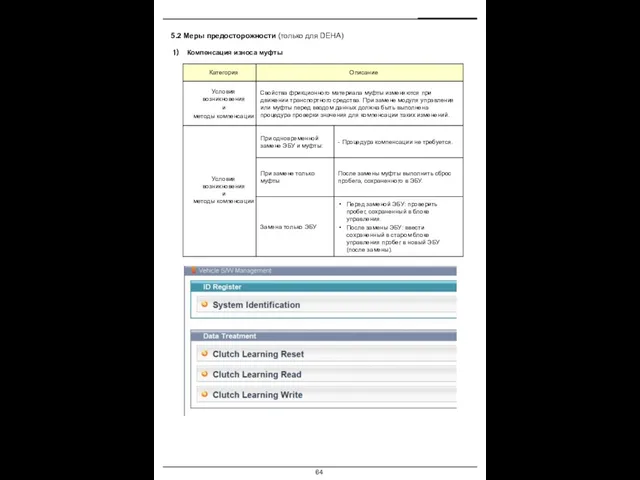
5.2 Меры предосторожности (только для DEHA)
Компенсация износа муфты
5.2 Меры предосторожности (только для DEHA)
Компенсация износа муфты
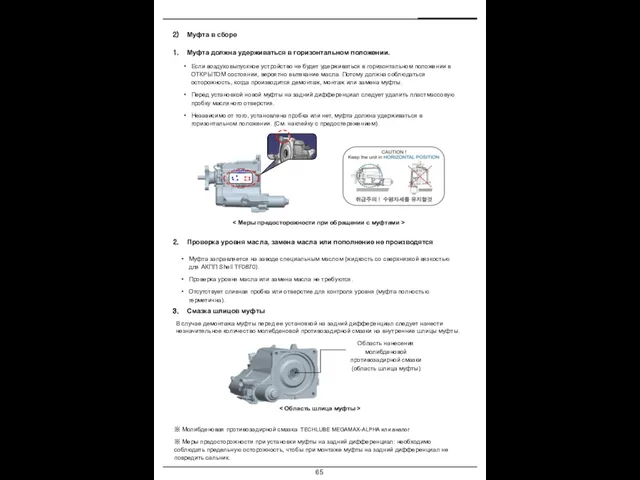
Муфта в сборе
Муфта должна удерживаться в горизонтальном положении.
Если воздуховыпускное устройство
Муфта в сборе
Муфта должна удерживаться в горизонтальном положении.
Если воздуховыпускное устройство
Модуль 3. ESC (электронная система
динамической стабилизации)
1. Обзор
1.1 Введение
1.2
Модуль 3. ESC (электронная система
динамической стабилизации)
1. Обзор
1.1 Введение
1.2
1. Обзор
1.1 Введение
Электронная система динамической стабилизации (ESC) повышает активную безопасность
1. Обзор
1.1 Введение
Электронная система динамической стабилизации (ESC) повышает активную безопасность
1.2 История создания ESC
Предотвращение блокировки колес
Независимое управление колесами
Управление колесами и рулевым
1.2 История создания ESC
Предотвращение блокировки колес
Независимое управление колесами
Управление колесами и рулевым
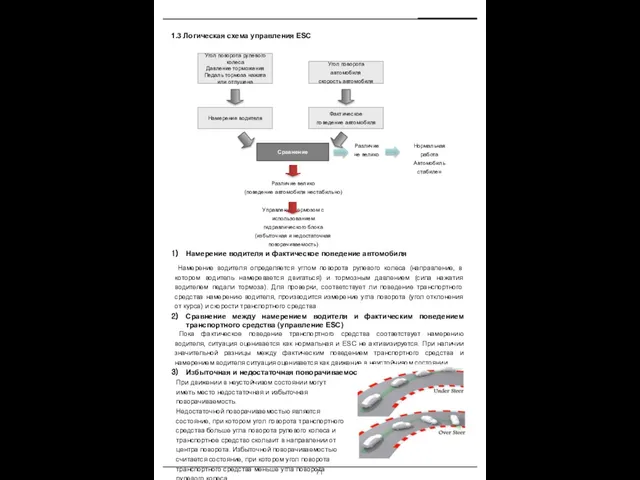
1.3 Логическая схема управления ESC
Угол поворота рулевого колеса
Давление торможения
Педаль тормоза
1.3 Логическая схема управления ESC
Угол поворота рулевого колеса
Давление торможения
Педаль тормоза
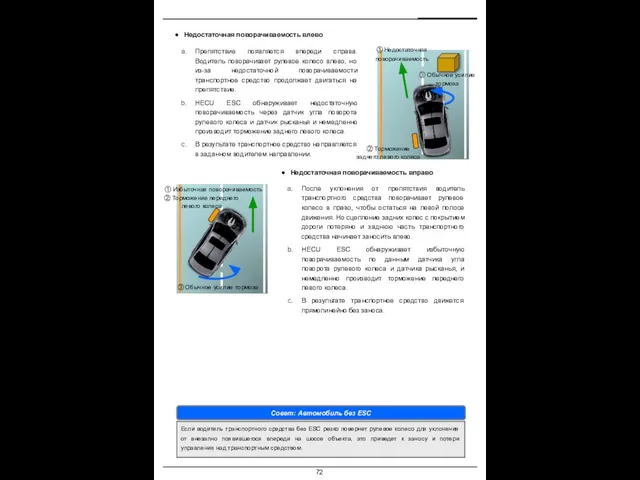
Совет: Автомобиль без ESC
Если водитель транспортного средства без ESC резко повернет
Совет: Автомобиль без ESC
Если водитель транспортного средства без ESC резко повернет
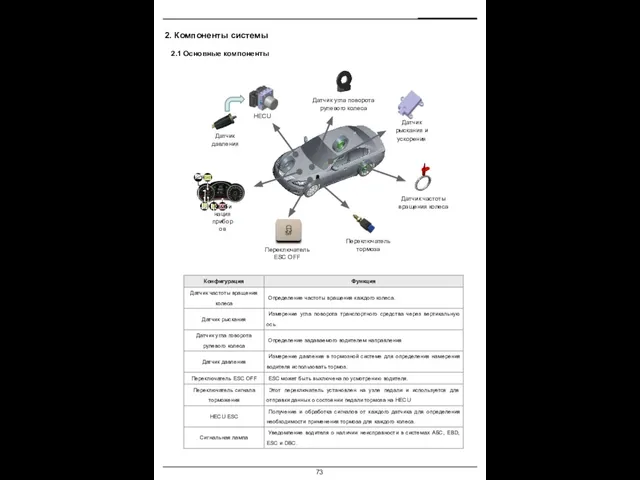
2. Компоненты системы
2.1 Основные компоненты
2. Компоненты системы
2.1 Основные компоненты
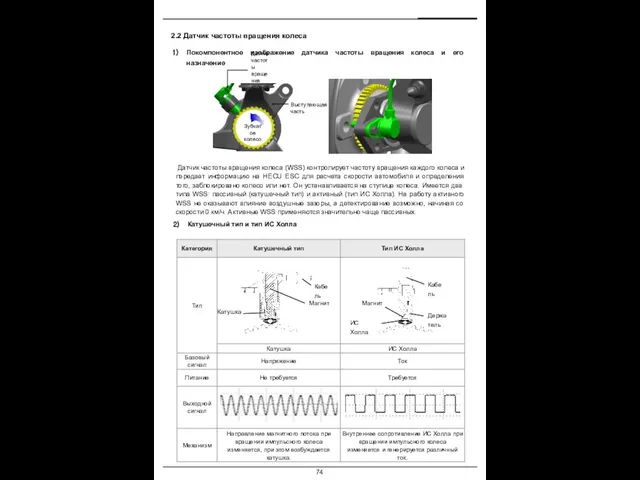
2.2 Датчик частоты вращения колеса
Датчик частоты вращения колеса (WSS) контролирует
2.2 Датчик частоты вращения колеса
Датчик частоты вращения колеса (WSS) контролирует
2.3 Датчик рыскания и ускорения по двум направлениям
Датчик рыскания измеряет
2.3 Датчик рыскания и ускорения по двум направлениям
Датчик рыскания измеряет
2.4 Датчик угла поворота рулевого колеса
Датчик угла поворота рулевого колеса
2.4 Датчик угла поворота рулевого колеса
Датчик угла поворота рулевого колеса

Магнитный датчик состоит из чувствительного элемента для определения угла поворота
Магнитный датчик состоит из чувствительного элемента для определения угла поворота
2.5 Переключатель ESC OFF
С помощью выключателя ESC водитель может выключить
2.5 Переключатель ESC OFF
С помощью выключателя ESC водитель может выключить
2.6 Переключатель стояночного тормоза
1) Покомпонентное изображение переключателя тормоза и его
2.6 Переключатель стояночного тормоза
1) Покомпонентное изображение переключателя тормоза и его

2.7 HECU ESC
Обзор
HECU ESC состоит из блока гидравлического управления
2.7 HECU ESC
Обзор
HECU ESC состоит из блока гидравлического управления
Гидравлический контур
Датчик давления
ESV
TCV
TCV
ESV
Элемент насоса
Элемент насоса
Электродвигатель насоса
ISV
ISV
ISV
ISV
OSV
OSV
OSV
OSV
Левый задний
Правый передний
Левый передний
Правый задний
Гидравлический контур
Датчик давления
ESV
TCV
TCV
ESV
Элемент насоса
Элемент насоса
Электродвигатель насоса
ISV
ISV
ISV
ISV
OSV
OSV
OSV
OSV
Левый задний
Правый передний
Левый передний
Правый задний
Нормальное торможение
Работа электромагнитного клапана
При обычном торможении давление тормозной жидкости передается колесному
Нормальное торможение
Работа электромагнитного клапана
При обычном торможении давление тормозной жидкости передается колесному
Торможение АБС
Работа электромагнитного клапана
При работе АБС давление торможения передается от
Торможение АБС
Работа электромагнитного клапана
При работе АБС давление торможения передается от
Торможение ESC
Работа электромагнитного клапана
В этом положении входной электромагнитный клапан (ы) (ISV)
Торможение ESC
Работа электромагнитного клапана
В этом положении входной электромагнитный клапан (ы) (ISV)
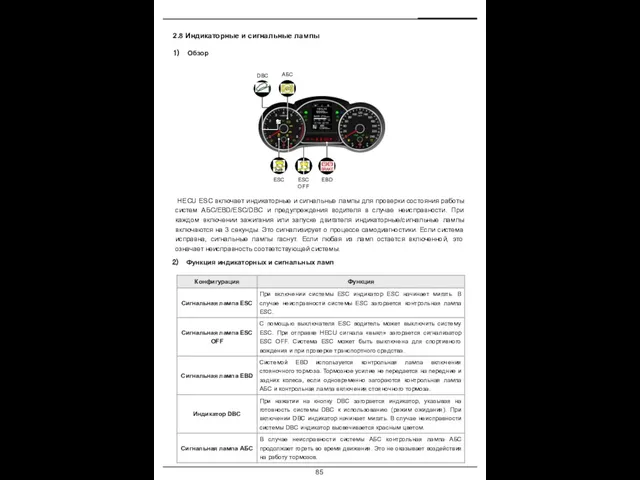
2.8 Индикаторные и сигнальные лампы
Обзор
HECU ESC включает индикаторные и
2.8 Индикаторные и сигнальные лампы
Обзор
HECU ESC включает индикаторные и
3. Техническое обслуживание
3.1 Вариантное кодирование
Вариантное исполнение записано в электронно-стираемом программируемом постоянном
3. Техническое обслуживание
3.1 Вариантное кодирование
Вариантное исполнение записано в электронно-стираемом программируемом постоянном
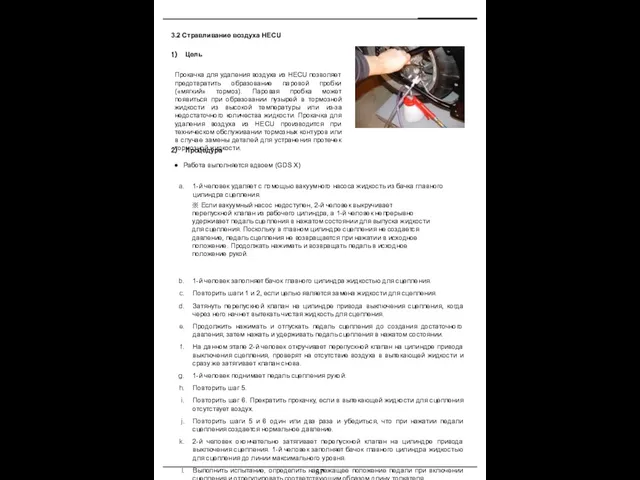
3.2 Стравливание воздуха HECU
Прокачка для удаления воздуха из HECU позволяет предотвратить
3.2 Стравливание воздуха HECU
Прокачка для удаления воздуха из HECU позволяет предотвратить

Использование оборудования (GDS)
Подготовить необходимое оборудование. Подключить шнур питания к штепсельной розетке,
Использование оборудования (GDS)
Подготовить необходимое оборудование. Подключить шнур питания к штепсельной розетке,
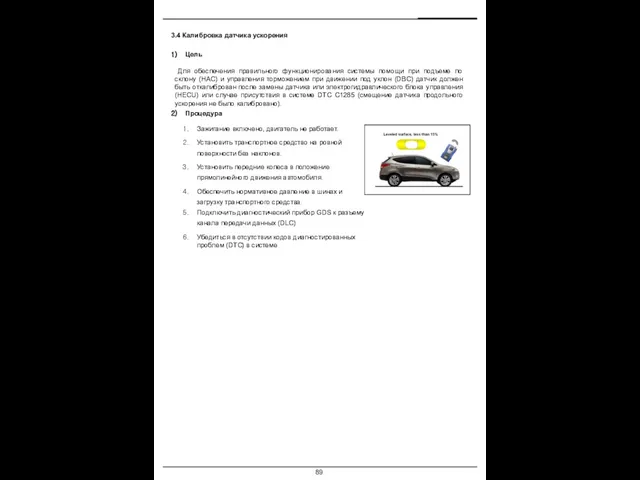
3.4 Калибровка датчика ускорения
Для обеспечения правильного функционирования системы помощи при
3.4 Калибровка датчика ускорения
Для обеспечения правильного функционирования системы помощи при
Модуль 4. EPB (электрический стояночный
тормоз)
1. Обзор
1.1 Введение
1.2 Сравнение
Модуль 4. EPB (электрический стояночный
тормоз)
1. Обзор
1.1 Введение
1.2 Сравнение

1. Обзор
1.1 Введение
EPB — аббревиатура для системы стояночного тормоза с электронным
1. Обзор
1.1 Введение
EPB — аббревиатура для системы стояночного тормоза с электронным
1.2 Сравнение типов EPB
Системы EPB могут быть разделены на два
1.2 Сравнение типов EPB
Системы EPB могут быть разделены на два
2. Схема
2.1Тип «суппорт»
В случае типа «суппорт» включение и выключение стояночного
2. Схема
2.1Тип «суппорт»
В случае типа «суппорт» включение и выключение стояночного
Входные/выходные элементы
Входные/выходные элементы
2.2 Тип «трос»
В случае типа «суппорт» включение и выключение стояночного
2.2 Тип «трос»
В случае типа «суппорт» включение и выключение стояночного
Входные/выходные элементы
Входные/выходные элементы

3. Компоненты
3.1 Переключатель EPB
Потянуть
→ Включить
Нажать
→ Отпустить
Переключатель EPB используется для
3. Компоненты
3.1 Переключатель EPB
Потянуть
→ Включить
Нажать
→ Отпустить
Переключатель EPB используется для
< Цепь переключателя EPB >
< Выход переключателя EPB >
Цепь переключателя EPB
< Цепь переключателя EPB >
< Выход переключателя EPB >
Цепь переключателя EPB
Датчик сцепления устанавливается на моделях с механической коробкой передач и используется
Датчик сцепления устанавливается на моделях с механической коробкой передач и используется
3.5 ЭБУ EPB (тип «суппорт)»
ЭБУ EPB активирует привод EPB после
3.5 ЭБУ EPB (тип «суппорт)»
ЭБУ EPB активирует привод EPB после
3.7 Модуль EPB (тип «трос»)
Блок EPB = ЭБУ EPB + привод
3.7 Модуль EPB (тип «трос»)
Блок EPB = ЭБУ EPB + привод
3.8 Лампа EPB и лампа AVH
AUTO
HOLD
AUTO
HOLD
AUTO
HOLD
Лампа EPB
Лампа AVH
Если переключатель
3.8 Лампа EPB и лампа AVH
AUTO
HOLD
AUTO
HOLD
AUTO
HOLD
Лампа EPB
Лампа AVH
Если переключатель
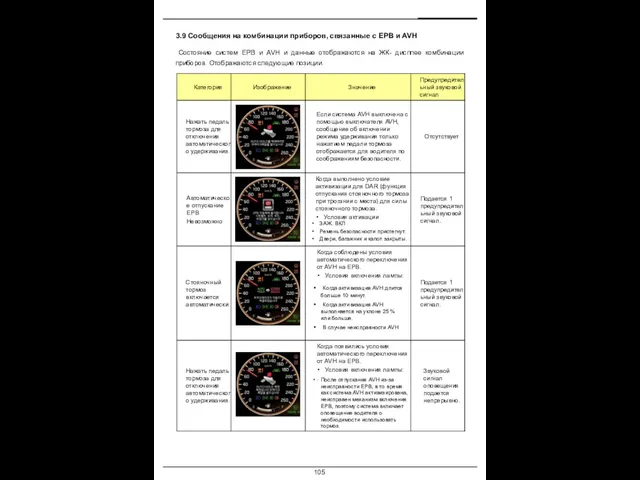
3.9 Сообщения на комбинации приборов, связанные с EPB и AVH
3.9 Сообщения на комбинации приборов, связанные с EPB и AVH

4. Функция
4.1 Функции EPB
Система EPB включает различные вспомогательные функции для
4. Функция
4.1 Функции EPB
Система EPB включает различные вспомогательные функции для
4.2 AVH (автоматическое удерживание автомобиля)
Обзор
Механизм
Автоматическое удерживание транспортного средства (AVH) — функция
4.2 AVH (автоматическое удерживание автомобиля)
Обзор
Механизм
Автоматическое удерживание транспортного средства (AVH) — функция
5. Техническое обслуживание
5.1 Замена тормозных колодок (тип «суппорт»)
При износе тормозных колодок
5. Техническое обслуживание
5.1 Замена тормозных колодок (тип «суппорт»)
При износе тормозных колодок
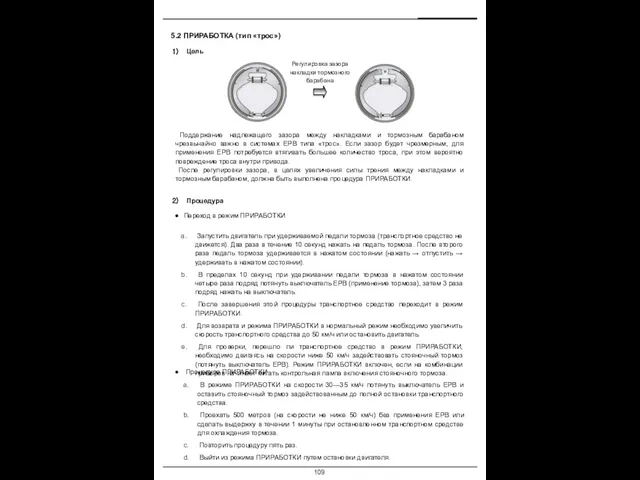
5.2 ПРИРАБОТКА (тип «трос»)
Переход в режим ПРИРАБОТКИ
Процедура ПРИРАБОТКИ
Цель
Процедура
Запустить двигатель
5.2 ПРИРАБОТКА (тип «трос»)
Переход в режим ПРИРАБОТКИ
Процедура ПРИРАБОТКИ
Цель
Процедура
Запустить двигатель
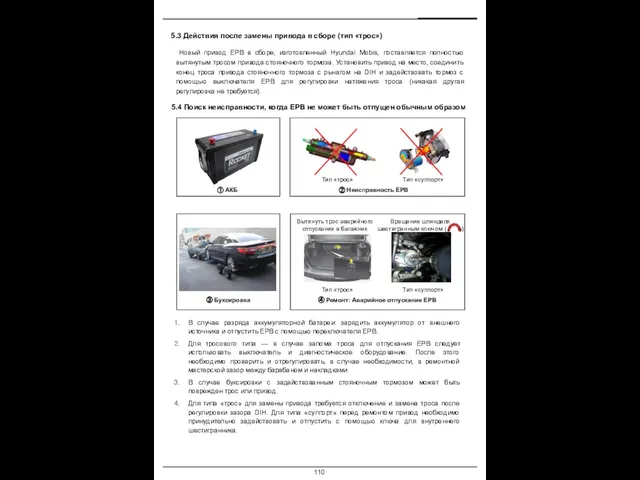
5.3 Действия после замены привода в сборе (тип «трос»)
Новый привод
5.3 Действия после замены привода в сборе (тип «трос»)
Новый привод
Модуль 5. MDPS (электроусилитель рулевого управления)
1. Обзор
1.1 Введение
1.2 История
Модуль 5. MDPS (электроусилитель рулевого управления)
1. Обзор
1.1 Введение
1.2 История


1. Обзор
1.1 Введение
MDPS управляет электродвигателем в зависимости от условий работы рулевого
1. Обзор
1.1 Введение
MDPS управляет электродвигателем в зависимости от условий работы рулевого
История и типы MDPS
EPS можно разделить в зависимости от места расположения
История и типы MDPS
EPS можно разделить в зависимости от места расположения
2. Схема
2.1 Конфигурация системы
Рулевое колесо
При повороте водителем рулевого колеса, первичный
2. Схема
2.1 Конфигурация системы
Рулевое колесо При повороте водителем рулевого колеса, первичный
2.2 Входные и выходные элементы
2.2 Входные и выходные элементы
Входные/выходные элементы и компоненты MDPS
3. Компоненты
3.1 Датчик угла и крутящего момента
Датчик
Входные/выходные элементы и компоненты MDPS
3. Компоненты
3.1 Датчик угла и крутящего момента
Датчик
Магнитное поле пропорционально крутящему моменту. ИС Холла определяет изменение магнитное
Магнитное поле пропорционально крутящему моменту. ИС Холла определяет изменение магнитное
Датчик угла поворота
При повороте рулевого колеса вращение передается на главную
Датчик угла поворота
При повороте рулевого колеса вращение передается на главную
4. Логика управления
4.1 Низкая скорость транспортного средства
При низкой скорости транспортного
4. Логика управления
4.1 Низкая скорость транспортного средства
При низкой скорости транспортного
4.4 Защита от перегрузки
При повороте рулевого колеса до упора на
4.4 Защита от перегрузки
При повороте рулевого колеса до упора на
5. Техническое обслуживание
< Управление программным обеспечением MDPS >
5.1 Вариантное кодирование
Вариантное
5. Техническое обслуживание
< Управление программным обеспечением MDPS >
5.1 Вариантное кодирование
Вариантное
Модуль 6. ECS (Подвеска с электронным
управлением)
1. Обзор
1.1 Введение
Модуль 6. ECS (Подвеска с электронным
управлением)
1. Обзор
1.1 Введение


1. Обзор
1.1 Введение
Подвеска с электронным управлением (ECS) была разработана с целью
1. Обзор
1.1 Введение
Подвеска с электронным управлением (ECS) была разработана с целью

1.2 История
Имеется два типа ECS: подвеска с электронным управлением и пневматическая
1.2 История
Имеется два типа ECS: подвеска с электронным управлением и пневматическая
2. Подвеска с электронным управлением
2.1 Обзор
ECS управляет демпфирующим усилием транспортного средства
2. Подвеска с электронным управлением
2.1 Обзор
ECS управляет демпфирующим усилием транспортного средства
2.3 Компоненты
Амортизатор с бесступенчатой регулировкой жесткости
Состоящий из интегрированного амортизатора
2.3 Компоненты
Амортизатор с бесступенчатой регулировкой жесткости
Состоящий из интегрированного амортизатора
Датчика ускорения кузова
Датчиком ускорения кузова измеряется ускорение в верхней и
Датчика ускорения кузова
Датчиком ускорения кузова измеряется ускорение в верхней и
ЭБУ ECS
ЭБУ ECS установлен справа от центра поперечины панели приборов. Данные
ЭБУ ECS
ЭБУ ECS установлен справа от центра поперечины панели приборов. Данные

2.4 Управление
Входные и выходные элементы
Провод
Провод
CAN
ЭБУ ECS
Датчик ускорения корпуса
(ПЛ, ПП, ЗП)
Датчик
2.4 Управление
Входные и выходные элементы
Провод
Провод
CAN
ЭБУ ECS
Датчик ускорения корпуса
(ПЛ, ПП, ЗП)
Датчик
Управление системой
Управление
Вход
Движение кузова
Вверх
Вверх
Вниз
Вниз
Вверх
Вниз
Амортизирующее
усилие
Мягкий
Жесткий
Мягкий
Жесткий
Жесткий
Жесткий
Мягкий
Мягкий
Skyhook
Для минимизации вибрации кузова амортизатор связан с
Управление системой
Управление
Вход
Движение кузова
Вверх
Вверх
Вниз
Вниз
Вверх
Вниз
Амортизирующее
усилие
Мягкий
Жесткий
Мягкий
Жесткий
Жесткий
Жесткий
Мягкий
Мягкий
Skyhook
Для минимизации вибрации кузова амортизатор связан с
3. Подвеска с электронным управлением
3.1 Обзор
ECAS использует воздух для поддержки положения
3. Подвеска с электронным управлением
3.1 Обзор
ECAS использует воздух для поддержки положения
3.2 Компоновка
Компрессор
ЭБУ
Емкость для воздуха (ресивер)
Амортизатор с переменным усилием заднего колеса (2
3.2 Компоновка
Компрессор
ЭБУ
Емкость для воздуха (ресивер)
Амортизатор с переменным усилием заднего колеса (2
3.3 Компоненты
Амортизирующая секция
Пневматическая рессора
Пневматические рессоры передних колес установлены на амортизаторы с
3.3 Компоненты
Амортизирующая секция
Пневматическая рессора
Пневматические рессоры передних колес установлены на амортизаторы с
Секция давления воздуха
Клапан для заправки пневматических рессор сжатым воздухом. Клапан присоединен
Секция давления воздуха
Клапан для заправки пневматических рессор сжатым воздухом. Клапан присоединен
Переключающий клапан
Установленный в компрессоре реверсивный распределитель служит для переключения потока от
Переключающий клапан
Установленный в компрессоре реверсивный распределитель служит для переключения потока от
Секция управления
Четыре датчика высоты транспортного средства установлены на кузове транспортного средства
Секция управления
Четыре датчика высоты транспортного средства установлены на кузове транспортного средства
Четыре датчика высоты транспортного средства установлены на кузове транспортного средства и
Четыре датчика высоты транспортного средства установлены на кузове транспортного средства и

3.4 Управление
Входные и выходные элементы
ЭБУ ECS определяет движение транспортного средства
3.4 Управление
Входные и выходные элементы
ЭБУ ECS определяет движение транспортного средства
Управление высотой транспортного средства
Высота транспортного средства может регулировать вручную или
Управление высотой транспортного средства
Высота транспортного средства может регулировать вручную или
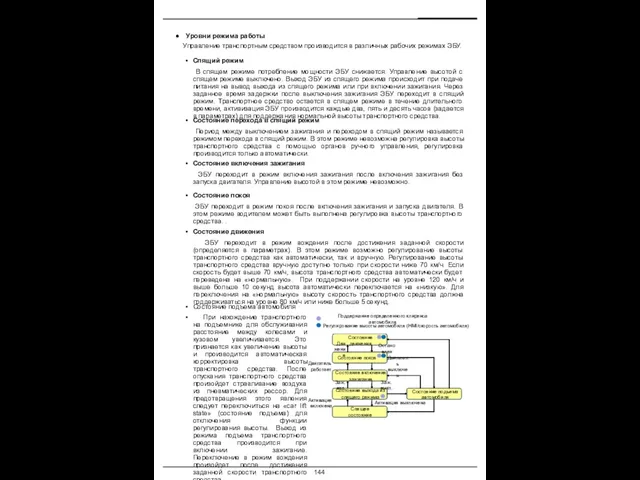
Управление транспортным средством производится в различных рабочих режимах ЭБУ.
Уровни режима
Управление транспортным средством производится в различных рабочих режимах ЭБУ.
Уровни режима
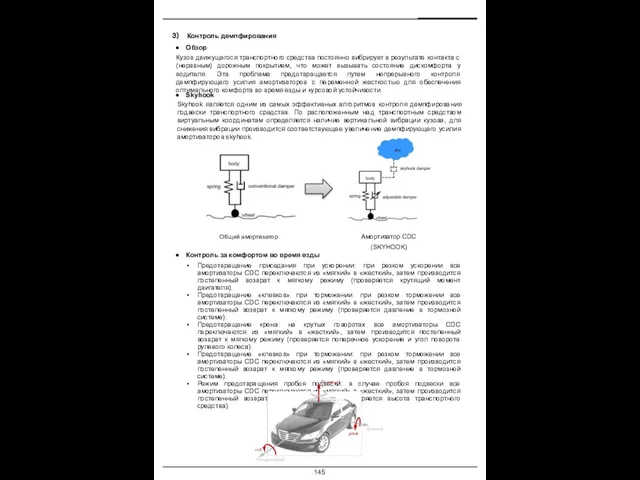
Контроль демпфирования
Обзор
Кузов движущегося транспортного средства постоянно вибрирует в результате контакта
Контроль демпфирования
Обзор
Кузов движущегося транспортного средства постоянно вибрирует в результате контакта
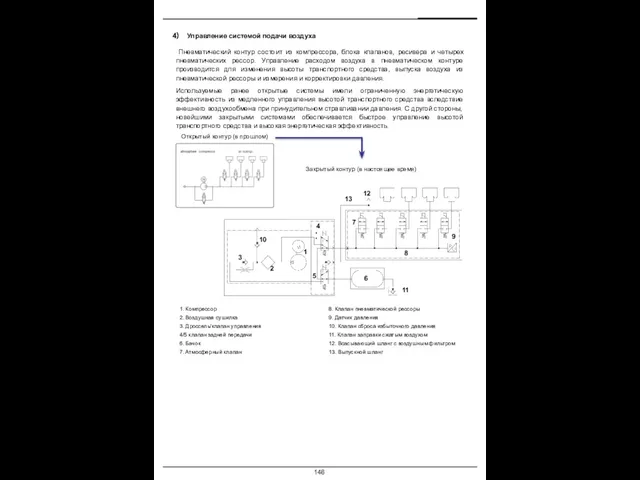
Управление системой подачи воздуха
Пневматический контур состоит из компрессора, блока клапанов,
Управление системой подачи воздуха
Пневматический контур состоит из компрессора, блока клапанов,
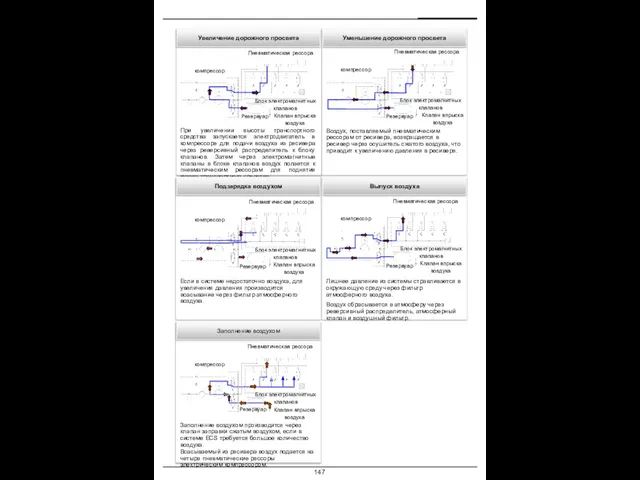
Увеличение дорожного просвета
При увеличении высоты транспортного средства запускается электродвигатель в компрессоре
Увеличение дорожного просвета
При увеличении высоты транспортного средства запускается электродвигатель в компрессоре
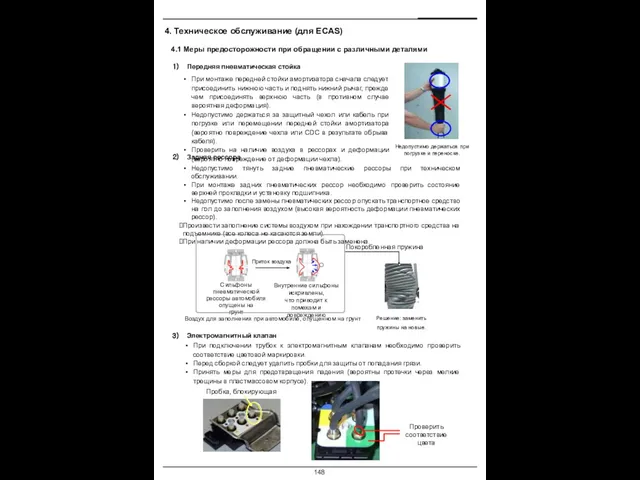
4. Техническое обслуживание (для ECAS)
4.1 Меры предосторожности при обращении с различными
4. Техническое обслуживание (для ECAS)
4.1 Меры предосторожности при обращении с различными
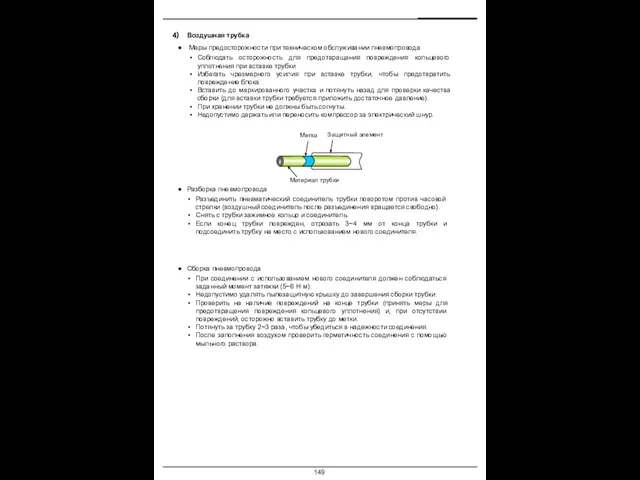
Воздушная трубка
Меры предосторожности при техническом обслуживании пневмопровода
Разборка пневмопровода
Сборка пневмопровода
Соблюдать
Воздушная трубка
Меры предосторожности при техническом обслуживании пневмопровода
Разборка пневмопровода
Сборка пневмопровода
Соблюдать
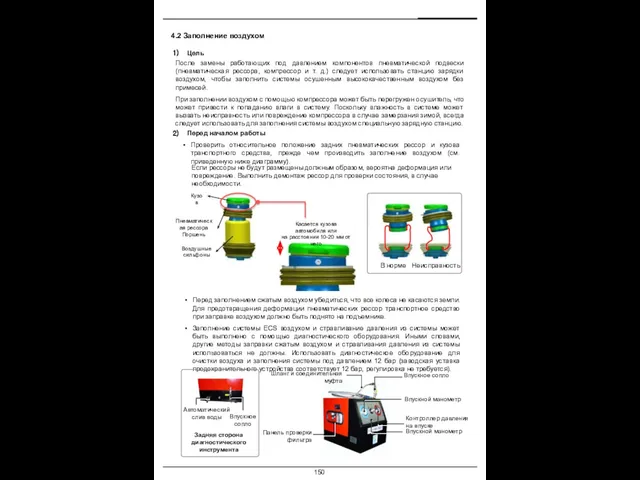
4.2 Заполнение воздухом
Цель
После замены работающих под давлением компонентов пневматической подвески
4.2 Заполнение воздухом
Цель
После замены работающих под давлением компонентов пневматической подвески
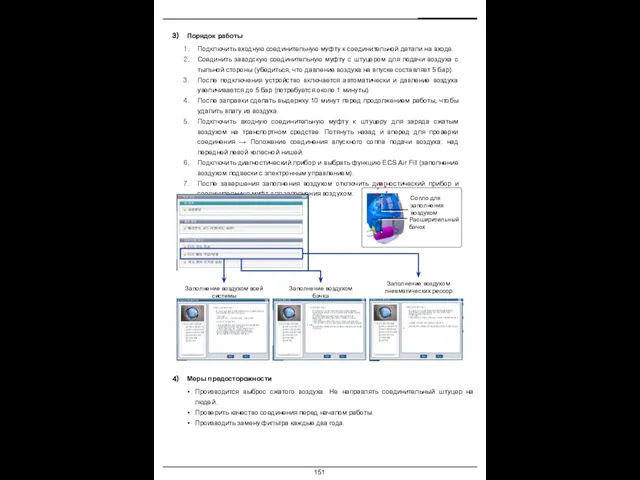
Порядок работы
Подключить входную соединительную муфту к соединительной детали на входе.
Соединить
Порядок работы
Подключить входную соединительную муфту к соединительной детали на входе.
Соединить
4.3 Меры технического обслуживания в зависимости от ситуации
Выпуск: подключить диагностическое оборудование
4.3 Меры технического обслуживания в зависимости от ситуации
Выпуск: подключить диагностическое оборудование
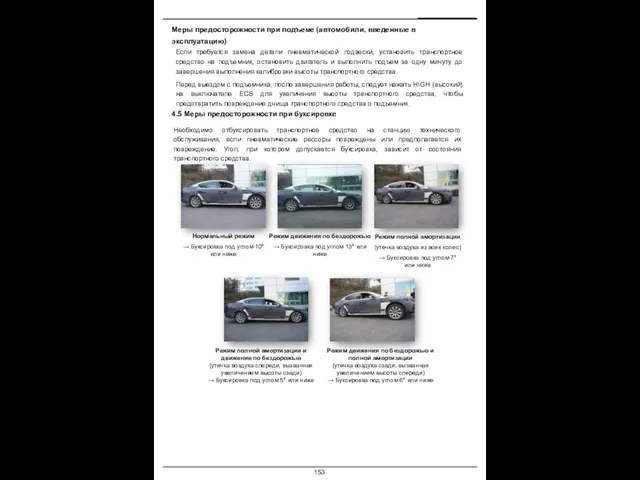
Меры предосторожности при подъеме (автомобили, введенные в эксплуатацию)
Необходимо отбуксировать транспортное средство
Меры предосторожности при подъеме (автомобили, введенные в эксплуатацию)
Необходимо отбуксировать транспортное средство
Модуль 7. TPMS (систем контроля давления в шинах)
Обзор
1.1 Введение
1.2
Модуль 7. TPMS (систем контроля давления в шинах)
Обзор
1.1 Введение
1.2

1. Обзор
1.1 Введение
TPMS - это аббревиатура для системы контроля давления в
1. Обзор
1.1 Введение
TPMS - это аббревиатура для системы контроля давления в
В основном, «когда загорается сигнальная лампа» связано с требованиями в их
В основном, «когда загорается сигнальная лампа» связано с требованиями в их
1.3 Системы верхнего и нижнего уровней
TPMS могут быть представлены как системы
1.3 Системы верхнего и нижнего уровней
TPMS могут быть представлены как системы
2. Компоненты
2.1 Основные компоненты
CAN
Приемник
= ЭБУ TPMS
Датчик давления воздуха в шинах (4
2. Компоненты
2.1 Основные компоненты
CAN
Приемник
= ЭБУ TPMS
Датчик давления воздуха в шинах (4
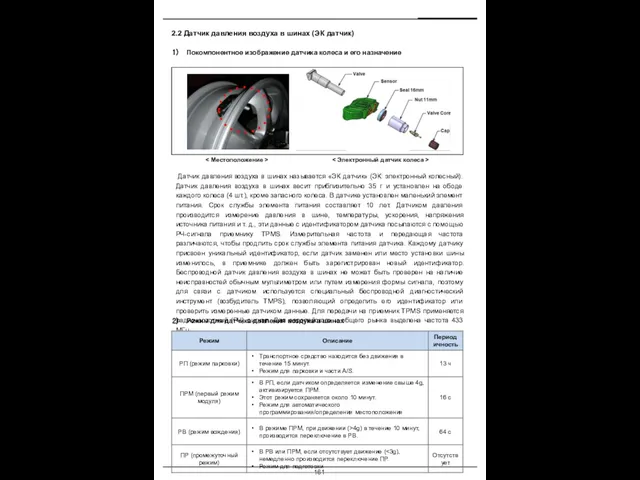
2.2 Датчик давления воздуха в шинах (ЭК датчик)
Покомпонентное изображение датчика колеса
2.2 Датчик давления воздуха в шинах (ЭК датчик)
Покомпонентное изображение датчика колеса
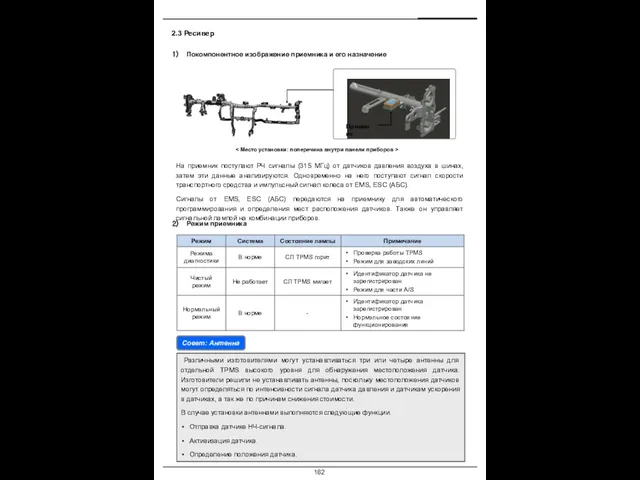
2.3 Ресивер
Покомпонентное изображение приемника и его назначение
На приемник поступают РЧ сигналы
2.3 Ресивер
Покомпонентное изображение приемника и его назначение
На приемник поступают РЧ сигналы

2.4 Сигнальная лампа и лампа положения
Сигнальная лампа для низкого давления
Лампа положения
Используется
2.4 Сигнальная лампа и лампа положения
Сигнальная лампа для низкого давления
Лампа положения
Используется
3. Управление
3.1 Технологическая карта процесса и системный блок
CAN
РЧ 315 МГц
Указывает местоположение
3. Управление
3.1 Технологическая карта процесса и системный блок
CAN
РЧ 315 МГц
Указывает местоположение
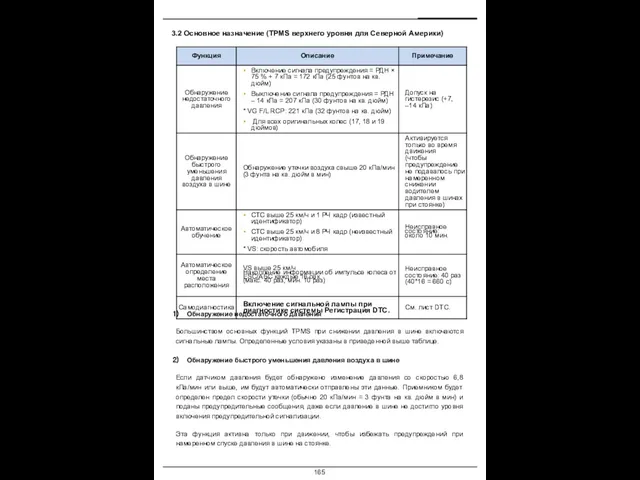
3.2 Основное назначение (TPMS верхнего уровня для Северной Америки)
Обнаружение недостаточного
3.2 Основное назначение (TPMS верхнего уровня для Северной Америки)
Обнаружение недостаточного
Автоматическое обучение
Под автоматическим программированием подразумевается, что будет выполнена проверка системы и
Автоматическое обучение
Под автоматическим программированием подразумевается, что будет выполнена проверка системы и
При замене датчика очень удобно выполнить регистрацию нового идентификатора датчика в
При замене датчика очень удобно выполнить регистрацию нового идентификатора датчика в
Автоматическое определение места расположения
При автоматическом определении места расположения системой производится
Автоматическое определение места расположения
При автоматическом определении места расположения системой производится
3.3 Алгоритм автоматического определения местоположения
Угловая скорость колес различается по перечисленным ниже
3.3 Алгоритм автоматического определения местоположения
Угловая скорость колес различается по перечисленным ниже
Одновременно с РЧ-сигналами от каждого датчика на
приемник также поступают импульсные
Одновременно с РЧ-сигналами от каждого датчика на приемник также поступают импульсные

Так как остальными колесами (ПП, ЗЛ, ЗП) делается меньше или больше
Так как остальными колесами (ПП, ЗЛ, ЗП) делается меньше или больше
4. Обслуживание TPMS
4.1 Крепление датчика
Проверить, не сместился ли вентиль со своего
4. Обслуживание TPMS
4.1 Крепление датчика
Проверить, не сместился ли вентиль со своего
Когда клапан вставлен полностью, начать закручивать гайку от руки, прижимая датчик
Когда клапан вставлен полностью, начать закручивать гайку от руки, прижимая датчик
4.2 Правила обращения с шинами
Ниже приводится описание мер по предотвращению
4.2 Правила обращения с шинами
Ниже приводится описание мер по предотвращению
4.3 Процедура замены
При замене датчика давления воздуха в шинах
Идентификатор замененного датчика
4.3 Процедура замены
При замене датчика давления воздуха в шинах
Идентификатор замененного датчика

При замене приемника TPMS
Приемник A/S должен быть переведен из чистого режима
При замене приемника TPMS
Приемник A/S должен быть переведен из чистого режима
 Электрический ток. Источники электрического тока
Электрический ток. Источники электрического тока Электромагнитные излучения
Электромагнитные излучения Магнітні властивості речовин
Магнітні властивості речовин  Электричество. Электростатика
Электричество. Электростатика Тайна мыльных пузырей
Тайна мыльных пузырей Асинхронный двигатель с короткозамкнутым ротором
Асинхронный двигатель с короткозамкнутым ротором Презентация по физике "Радиолокация" - скачать
Презентация по физике "Радиолокация" - скачать  Уравнение Менделеева - Клапейрона
Уравнение Менделеева - Клапейрона Ультрафиолетовое Излучение
Ультрафиолетовое Излучение Механические свойства твердых тел. Механические колебания. Звук и ультразвук
Механические свойства твердых тел. Механические колебания. Звук и ультразвук Проецирующий аппарат и элементы картины
Проецирующий аппарат и элементы картины Аттестационная работа. Элективный курс "Избранные вопросы физики" в 10 классе
Аттестационная работа. Элективный курс "Избранные вопросы физики" в 10 классе Нанотехнологии. Классификация наноматериалов. Отдельные представители наночастиц
Нанотехнологии. Классификация наноматериалов. Отдельные представители наночастиц Свободные колебания Колебательные системы. Маятник
Свободные колебания Колебательные системы. Маятник Аттестационная работа. Физический практикум в 11 классе с использованием лабораторного оборудования
Аттестационная работа. Физический практикум в 11 классе с использованием лабораторного оборудования Реши анаграмму
Реши анаграмму  Дисперсиялык талдаудын бір факторлы параметрлік емес үқсастығы критерий - Крускал Уоллис критерийі
Дисперсиялык талдаудын бір факторлы параметрлік емес үқсастығы критерий - Крускал Уоллис критерийі Презентация по физике Скорость света
Презентация по физике Скорость света  Технология изготовления рамки ножовочной
Технология изготовления рамки ножовочной Электромагнитный ускоритель масс
Электромагнитный ускоритель масс Технология сварочных работ. История сварки
Технология сварочных работ. История сварки Силовые агрегаты и двигатели
Силовые агрегаты и двигатели Буландыру. Буландыру әдістері
Буландыру. Буландыру әдістері Механические колебания и волны. Акустика
Механические колебания и волны. Акустика Экспериментальные и теоретические основы квантовой теории
Экспериментальные и теоретические основы квантовой теории “Веселка” Виконала; уч. 11 класу Чорнобаєва Олена
“Веселка” Виконала; уч. 11 класу Чорнобаєва Олена  Презентация по физике "Виды Теплопередачи ( Теплообмена )" - скачать
Презентация по физике "Виды Теплопередачи ( Теплообмена )" - скачать  Прочность металлов и сплавов как совокупная характеристика влияния структурных уровней
Прочность металлов и сплавов как совокупная характеристика влияния структурных уровней