- Произвольная плоская система сил

Содержание
- 2. Любая плоская система сил, действующих на абсолютно твердое тело, при приведении к произвольно выбранному центру О
- 3. Примечание. Главный момент для плоской системы сил заменен на алгебраическую сумму моментов всех сил относительно центра
- 4. Вывод Формулы (1) выражают следующие аналитические условия равновесия: для равновесия произвольной плоской системы сил необходимо и
- 5. Для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы моментов всех этих сил относительно
- 6. Другая форма условий равновесия для параллельных сил, получающаяся из равенств (2) или (3), имеет вид 5.3.
- 7. Вывод. Реакцию Неизвестную по направлению реакцию неподвижной шарнирной Реакция такой опоры проходит через ось шарнира и
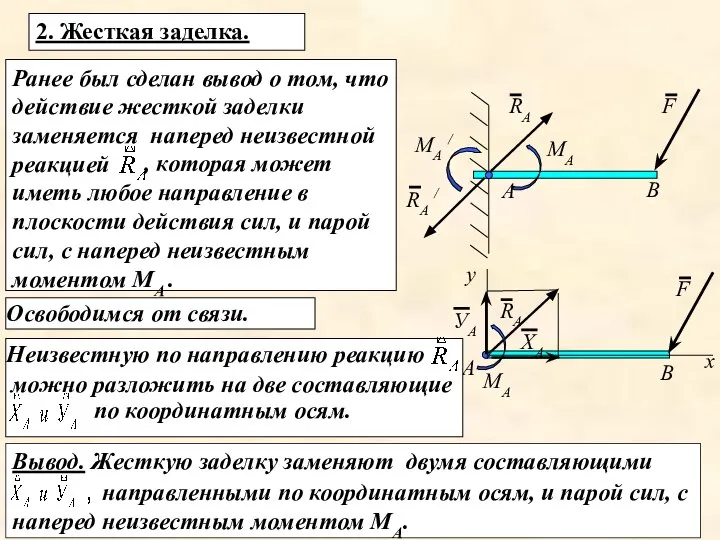
- 8. Ранее был сделан вывод о том, что действие жесткой заделки заменяется наперед неизвестной реакцией и парой
- 9. Пример 1. 3. Освободимся от связей. 1. Выберем объект равновесия. Брус АВ. 2. Приложим к объекту
- 10. Реакции связей будут направлены перпендикулярно соответствующим плоскостям. Реакция связи направлена по общей нормали в точке соприкосновения
- 11. Найдем плечо силы относительно точки А: h = АК. 5. Выберем моментную точку. Удобно взять точку
- 12. Из последнего уравнения находим х: N2 - R sin (α) = 0, у: N1 – P
- 13. Силы 2. Приложим к объекту равновесия заданные силы. и пара сил с моментом mD . Симметричная
- 14. 4. Выберем систему координат. В точке А подвижный шарнир, который заменяется одной реакцией , перпендикулярной плоскости,
- 15. При вычислении момента силы была использована теорема Вариньона о моменте равнодействующей: Предварительно разложим силу Модули составляющих:
- 16. Из первого уравнения получим 7. Составим уравнения равновесия. ∑ Fkx = ХВ + Q cos α
- 18. Скачать презентацию
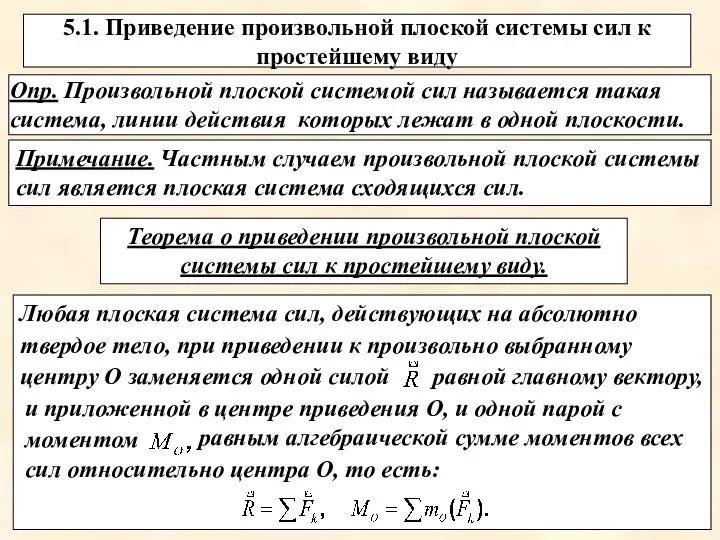
Любая плоская система сил, действующих на абсолютно твердое тело, при приведении
Любая плоская система сил, действующих на абсолютно твердое тело, при приведении
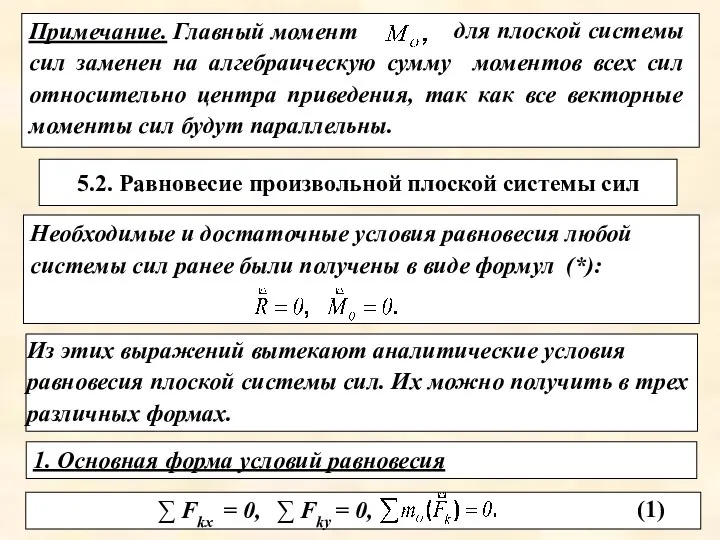
Примечание. Главный момент
для плоской системы сил заменен на алгебраическую сумму
Примечание. Главный момент
для плоской системы сил заменен на алгебраическую сумму
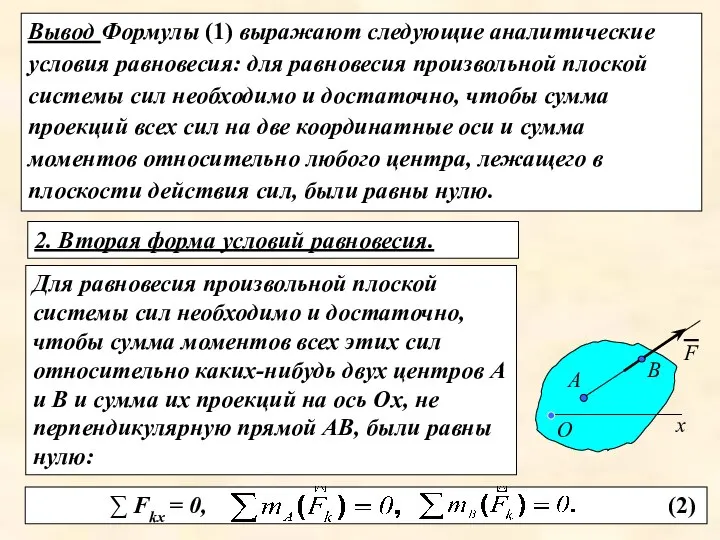
Вывод Формулы (1) выражают следующие аналитические условия равновесия: для равновесия произвольной
Вывод Формулы (1) выражают следующие аналитические условия равновесия: для равновесия произвольной
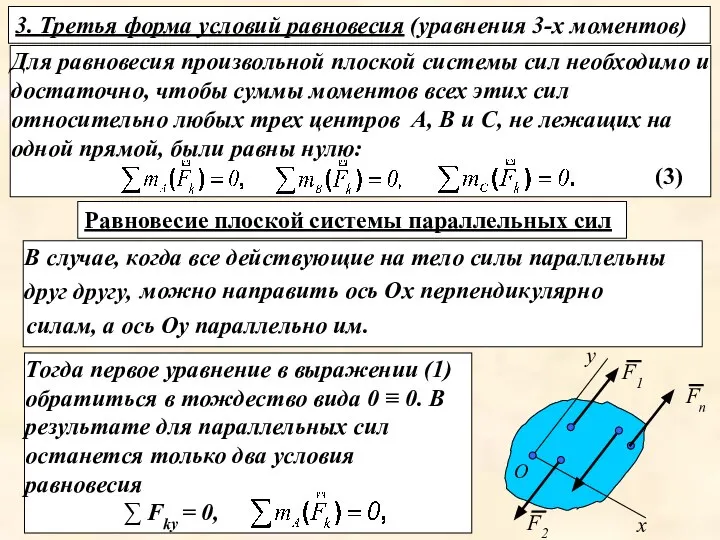
Для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы
Для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы
Другая форма условий равновесия для параллельных сил, получающаяся из равенств (2)
Другая форма условий равновесия для параллельных сил, получающаяся из равенств (2)
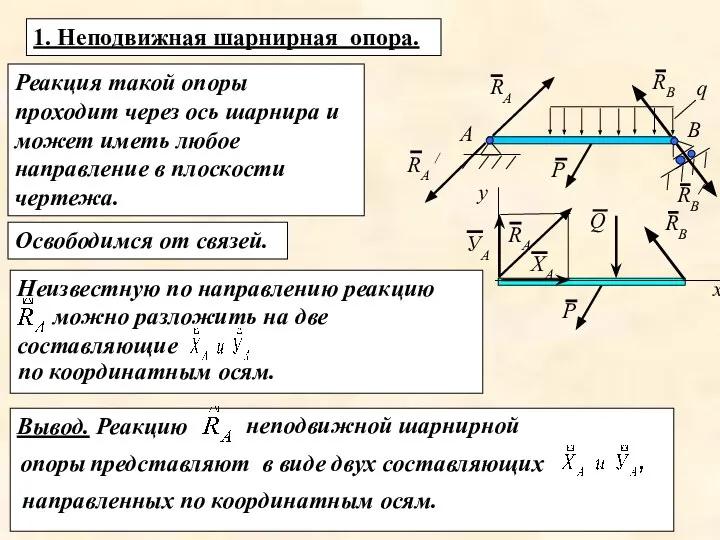
Вывод. Реакцию
Неизвестную по направлению реакцию
неподвижной шарнирной
Реакция такой опоры проходит через ось
Вывод. Реакцию
Неизвестную по направлению реакцию
неподвижной шарнирной
Реакция такой опоры проходит через ось
Ранее был сделан вывод о том, что действие жесткой заделки заменяется
Ранее был сделан вывод о том, что действие жесткой заделки заменяется
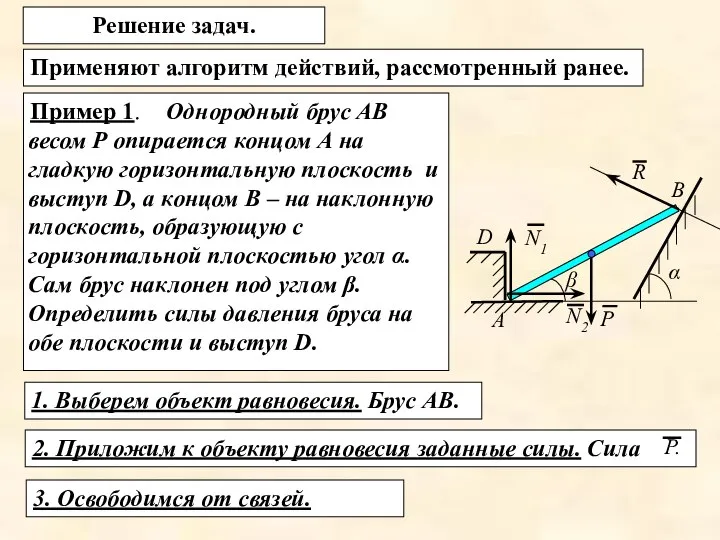
Пример 1.
3. Освободимся от связей.
1. Выберем объект равновесия. Брус АВ.
2. Приложим
Пример 1.
3. Освободимся от связей.
1. Выберем объект равновесия. Брус АВ.
2. Приложим
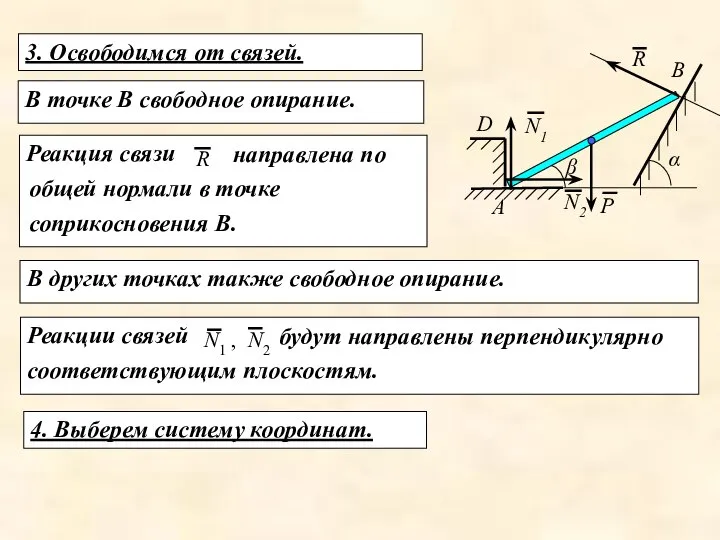
Реакции связей
будут направлены перпендикулярно соответствующим плоскостям.
Реакция связи
направлена по общей
Реакции связей
будут направлены перпендикулярно соответствующим плоскостям.
Реакция связи
направлена по общей
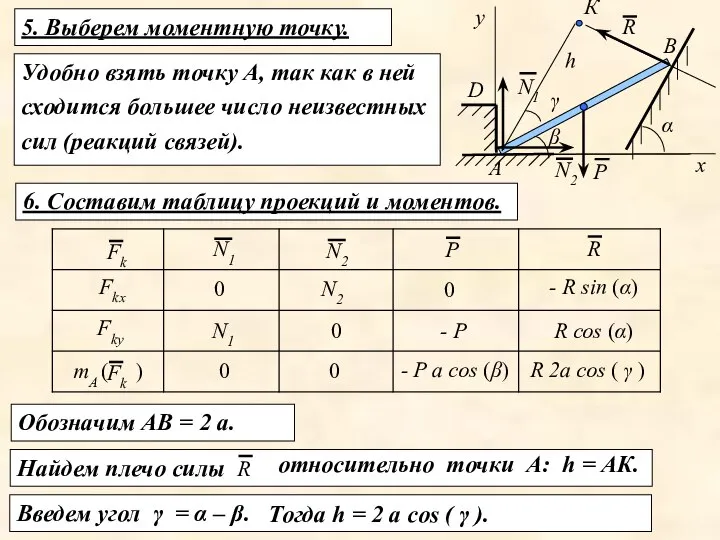
Найдем плечо силы
относительно точки А: h = АК.
5.
Найдем плечо силы
относительно точки А: h = АК.
5.
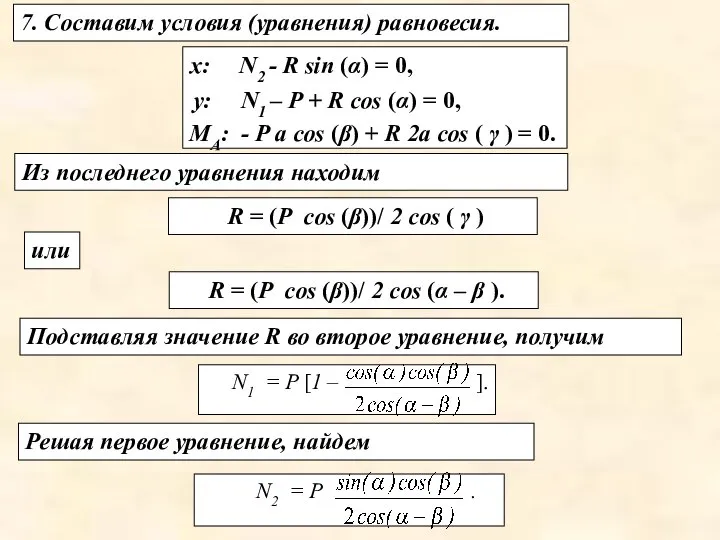
Из последнего уравнения находим
х: N2 - R sin (α) = 0,
у:
Из последнего уравнения находим
х: N2 - R sin (α) = 0,
у:
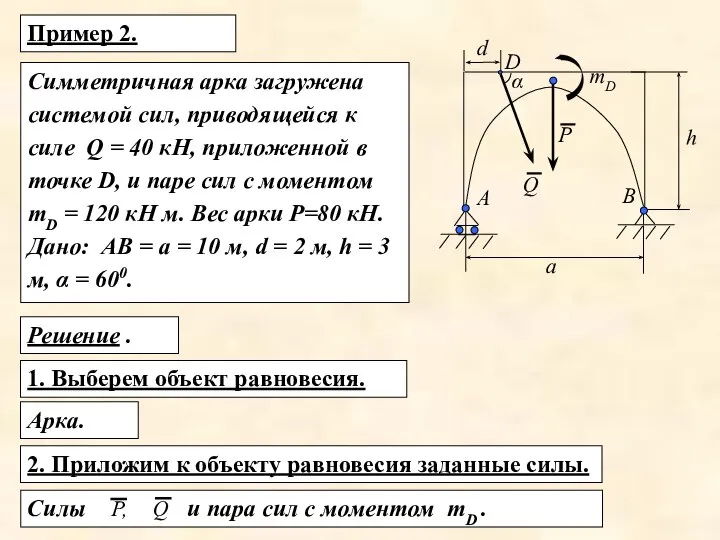
Силы
2. Приложим к объекту равновесия заданные силы.
и пара
Силы
2. Приложим к объекту равновесия заданные силы.
и пара
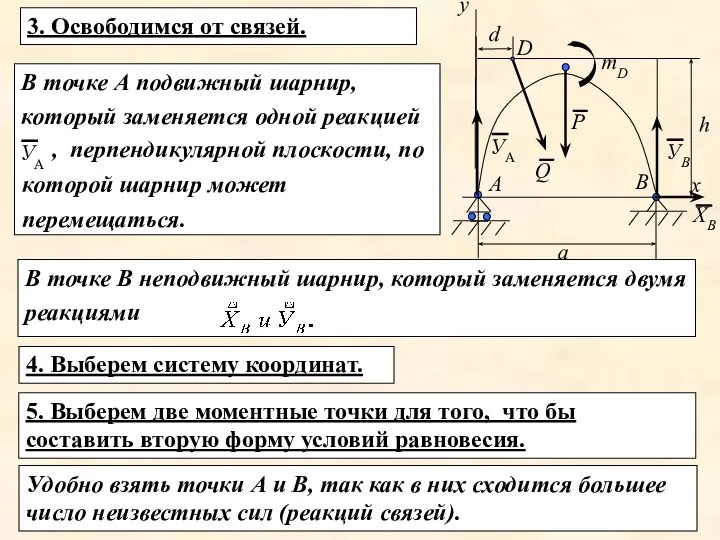
4. Выберем систему координат.
В точке А подвижный шарнир, который заменяется одной
4. Выберем систему координат.
В точке А подвижный шарнир, который заменяется одной
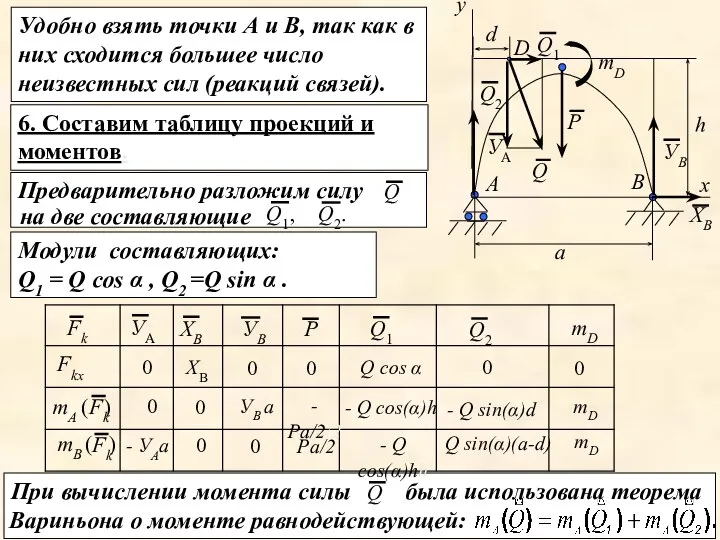
При вычислении момента силы
была использована теорема Вариньона о моменте равнодействующей:
При вычислении момента силы
была использована теорема Вариньона о моменте равнодействующей:
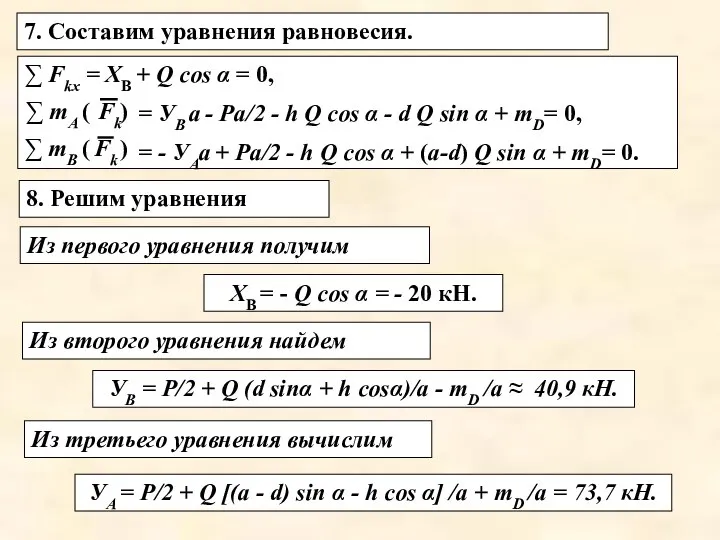
Из первого уравнения получим
7. Составим уравнения равновесия.
∑ Fkx = ХВ +
Из первого уравнения получим
7. Составим уравнения равновесия.
∑ Fkx = ХВ +
 Составные части реактивного двигателя
Составные части реактивного двигателя Термоядерные реакции. Тема 6
Термоядерные реакции. Тема 6 Сведения о технологии и условиях выполнения работ по техническому обслуживанию и ремонту
Сведения о технологии и условиях выполнения работ по техническому обслуживанию и ремонту Основные понятия и аксиомы статики
Основные понятия и аксиомы статики Кинематика
Кинематика Корпускулярные свойства рентгеновского излучения
Корпускулярные свойства рентгеновского излучения Физические основы электропроводности. Твердые тела и их классификация
Физические основы электропроводности. Твердые тела и их классификация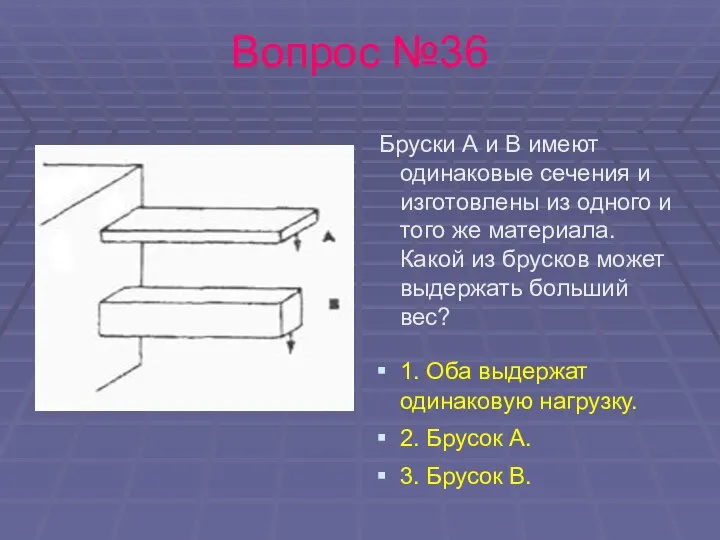 Тестовые вопросы по физике 36-70
Тестовые вопросы по физике 36-70 ИНФРАЗВУК НЕСЛЫШИМЫЙ «ВРАГ»
ИНФРАЗВУК НЕСЛЫШИМЫЙ «ВРАГ»  Автор работы: Камскова Екатерина Автор работы: Камскова Екатерина МОУ СОШ №6, 9Б класс
Автор работы: Камскова Екатерина Автор работы: Камскова Екатерина МОУ СОШ №6, 9Б класс Рентгеновские аппараты. Цифровые рентгенодиагностические комплексы. (Лекция 10)
Рентгеновские аппараты. Цифровые рентгенодиагностические комплексы. (Лекция 10) Методы расчёта электрических цепей
Методы расчёта электрических цепей Первый этап в развитии физики элементарных частиц. От электрона до позитрона: 1897-1932
Первый этап в развитии физики элементарных частиц. От электрона до позитрона: 1897-1932 Электрическая лампа
Электрическая лампа Законы физики
Законы физики Расчет скорости геострофического ветра по картам АТ
Расчет скорости геострофического ветра по картам АТ Реактивное движение
Реактивное движение Презентация по физике "В мире звука" - скачать
Презентация по физике "В мире звука" - скачать  Прибор для диагностики состояния человека в условиях переменной гравитации
Прибор для диагностики состояния человека в условиях переменной гравитации Фотоника. Световые волны
Фотоника. Световые волны Физические задачи,приводящие к дифференциальным уравнениям
Физические задачи,приводящие к дифференциальным уравнениям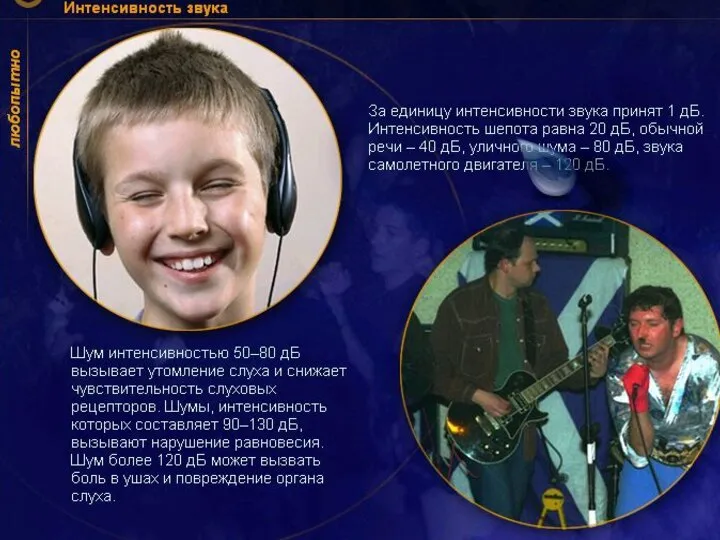 Действие шума на организм (5)
Действие шума на организм (5) Свеча. Горючий материал
Свеча. Горючий материал Применение закона Ома для участка цепи при решении задач
Применение закона Ома для участка цепи при решении задач Идентификация и моделирование CW–crds спектра поглощения молекулы двуокиси азота в области 6000 – 6400 см -1
Идентификация и моделирование CW–crds спектра поглощения молекулы двуокиси азота в области 6000 – 6400 см -1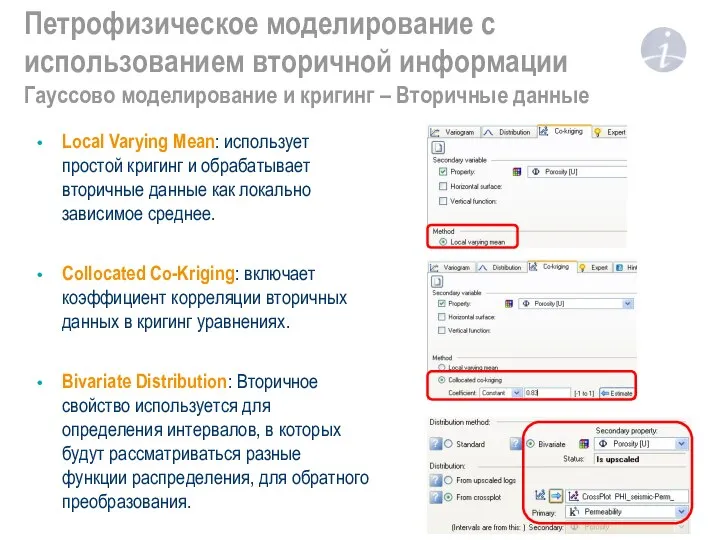 Петрофизическое моделирование с использованием вторичной информации. Гауссово моделирование и кригинг – Вторичные данные
Петрофизическое моделирование с использованием вторичной информации. Гауссово моделирование и кригинг – Вторичные данные Тема 3. Движение квазичастиц электронов в электрическом поле
Тема 3. Движение квазичастиц электронов в электрическом поле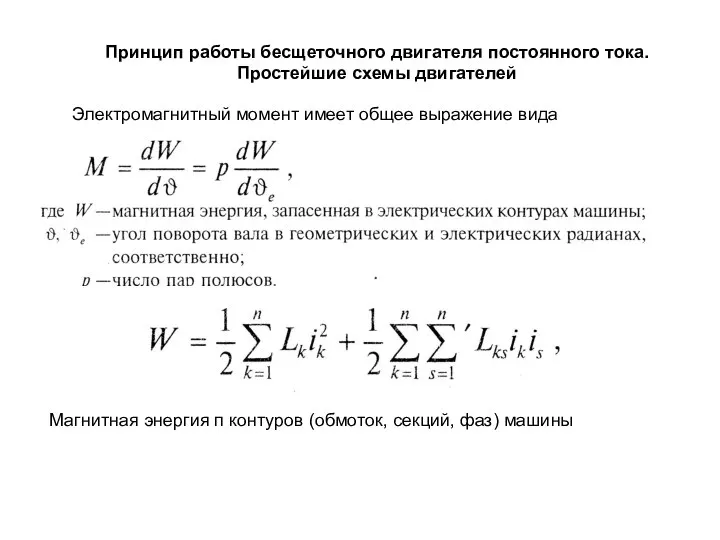 Принцип работы бесщеточного двигателя постоянного тока. Простейшие схемы двигателей. (Лекция 2)
Принцип работы бесщеточного двигателя постоянного тока. Простейшие схемы двигателей. (Лекция 2)