- Расчет криволинейных стержней

Содержание
- 2. Интеграл Мора можно использовать для определения перемещений как прямолинейных, так и криволинейных стержневых систем. Поскольку интеграл
- 3. Пример: Для кривого бруса в форме четверти круга найти горизонтальное перемещение точки А. Нарисуем вспомогательную единичную
- 4. Изгибающий момент от внешних сил Изгибающий момент от единичной силы Горизонтальное перемещение точки А
- 5. Задана плоская рама, состоящая из двух прямолинейных и одного криволинейного участка. Система раз статически неопределима. На
- 6. Основная система Эквивалентная система 1 2 3
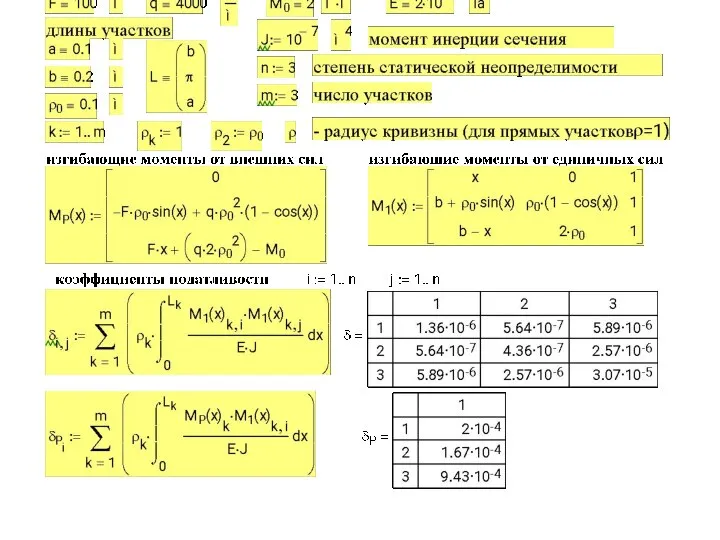
- 7. При расчете интегралов Мора будем учитывать только изгибающий момент Выражаем значения моментов через координаты x. В
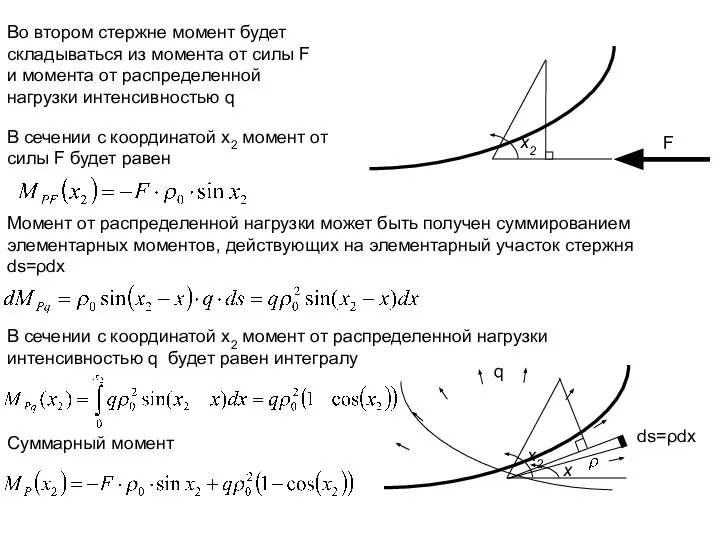
- 8. F x2 Во втором стержне момент будет складываться из момента от силы F и момента от
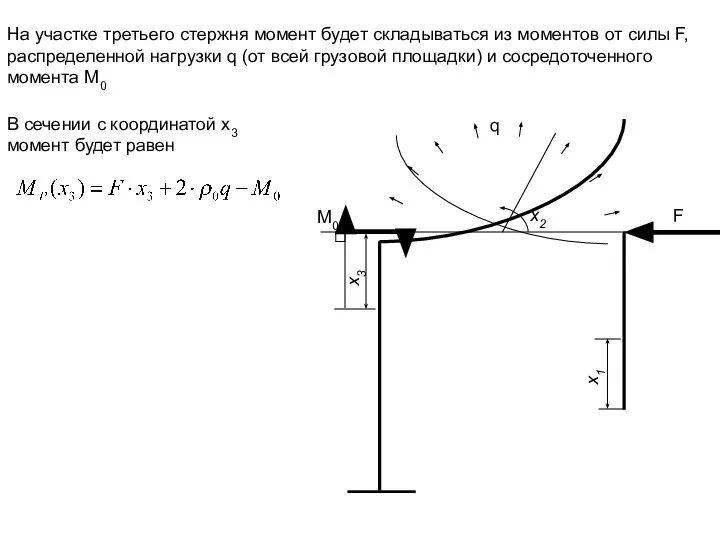
- 9. x3 x1 F M0 q x2 На участке третьего стержня момент будет складываться из моментов от
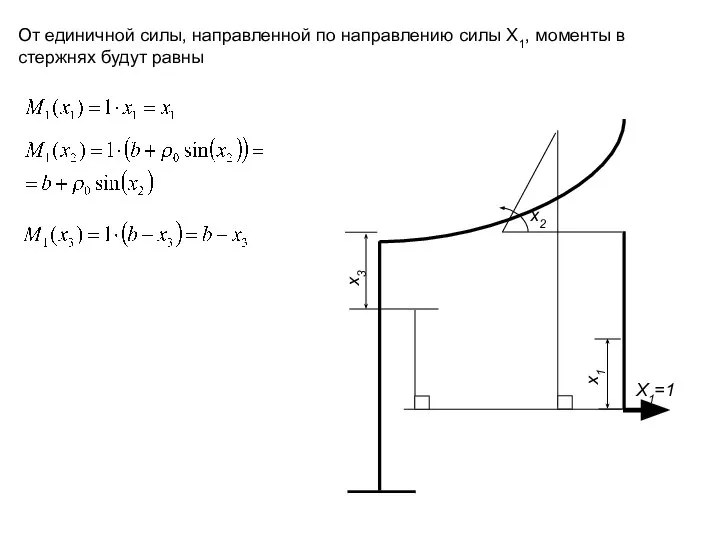
- 10. x3 x1 X1=1 x2 От единичной силы, направленной по направлению силы X1, моменты в стержнях будут
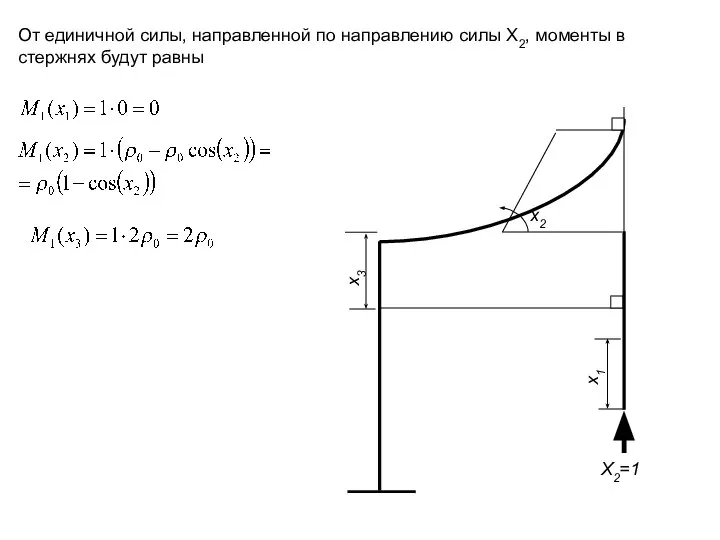
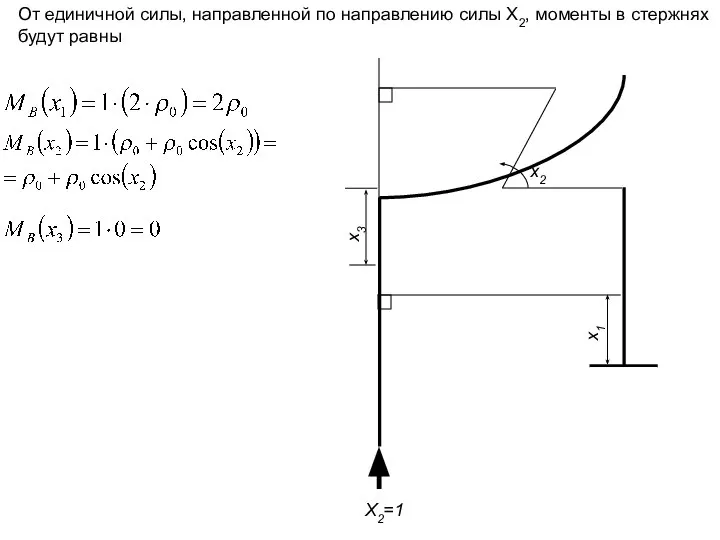
- 11. x3 x1 X2=1 x2 От единичной силы, направленной по направлению силы X2, моменты в стержнях будут
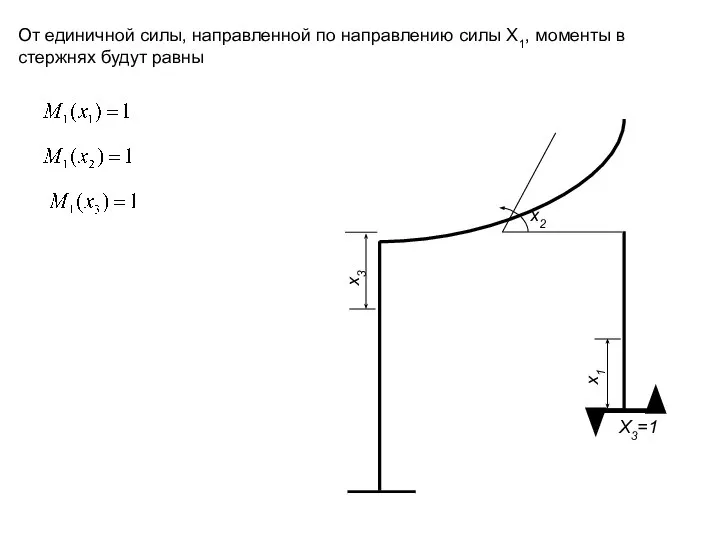
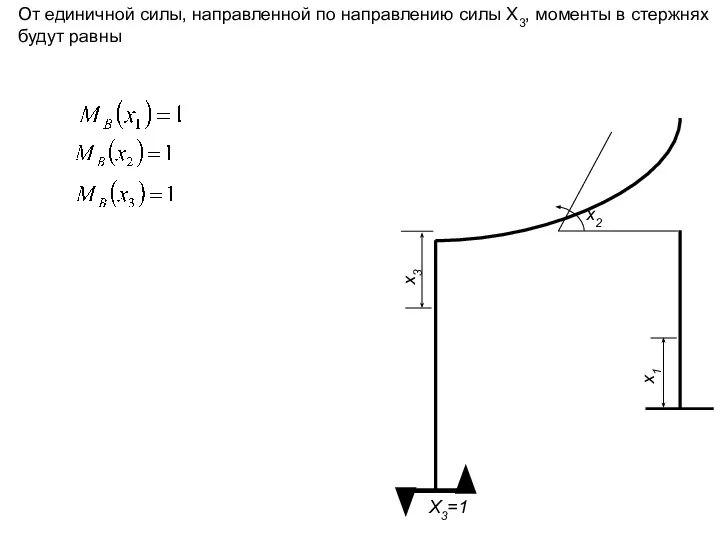
- 12. x3 x1 X3=1 x2 От единичной силы, направленной по направлению силы X1, моменты в стержнях будут
- 13. Система канонических уравнений метода сил для три раза статически неопределимой системы имеет вид Для более компактного
- 15. Решаем систему уравнений методом обращения матрицы Рассчитываем действительные значения внутренних силовых факторов (изгибающего момента)
- 16. Проверка правильности решения Сущность проверки правильности решения в расчете перемещений в местах отброшенных связей в условиях
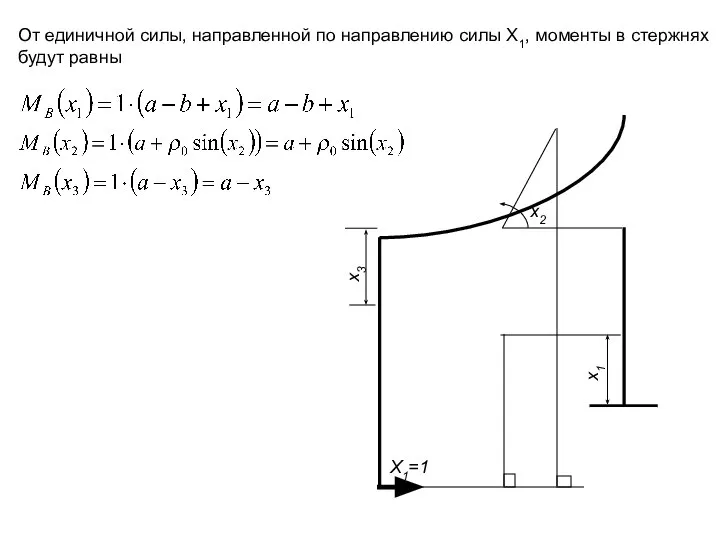
- 17. x3 x1 X1=1 x2 От единичной силы, направленной по направлению силы X1, моменты в стержнях будут
- 18. x3 x1 X2=1 x2 От единичной силы, направленной по направлению силы X2, моменты в стержнях будут
- 19. x3 x1 X3=1 x2 От единичной силы, направленной по направлению силы X3, моменты в стержнях будут
- 20. Рассчитываем перемещения в эквивалентной системе Проверка пройдена
- 21. Определяем угол поворота сечения в точке А Для расчета угла поворота приложим в т А единичный
- 23. Скачать презентацию
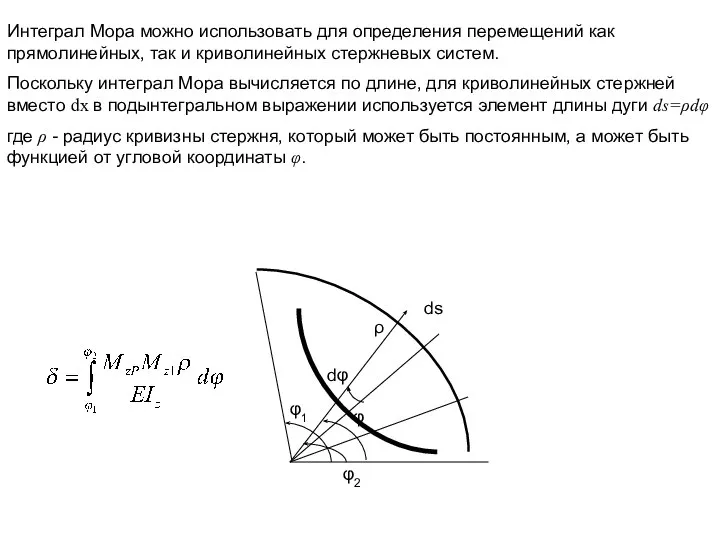
Интеграл Мора можно использовать для определения перемещений как прямолинейных, так и
Интеграл Мора можно использовать для определения перемещений как прямолинейных, так и
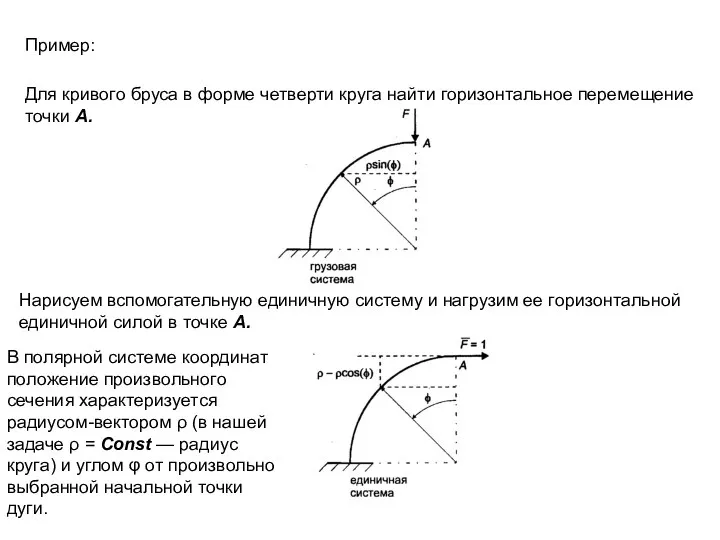
Пример:
Для кривого бруса в форме четверти круга найти горизонтальное перемещение точки
Пример:
Для кривого бруса в форме четверти круга найти горизонтальное перемещение точки
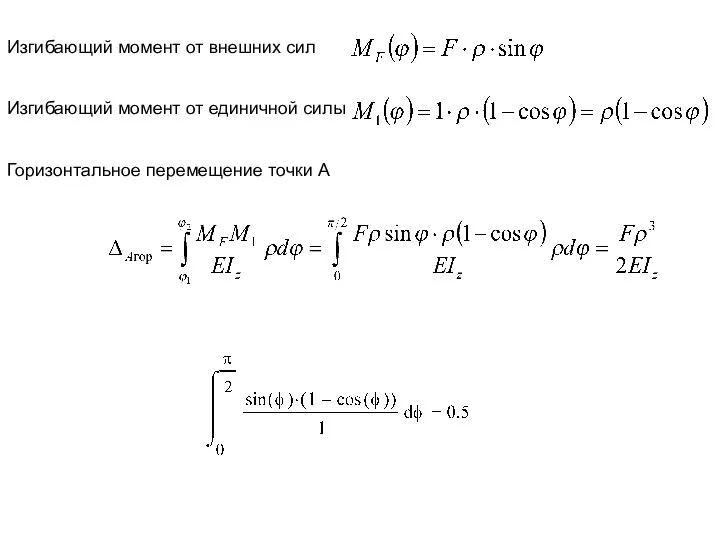
Изгибающий момент от внешних сил
Изгибающий момент от единичной силы
Горизонтальное
Изгибающий момент от внешних сил
Изгибающий момент от единичной силы
Горизонтальное
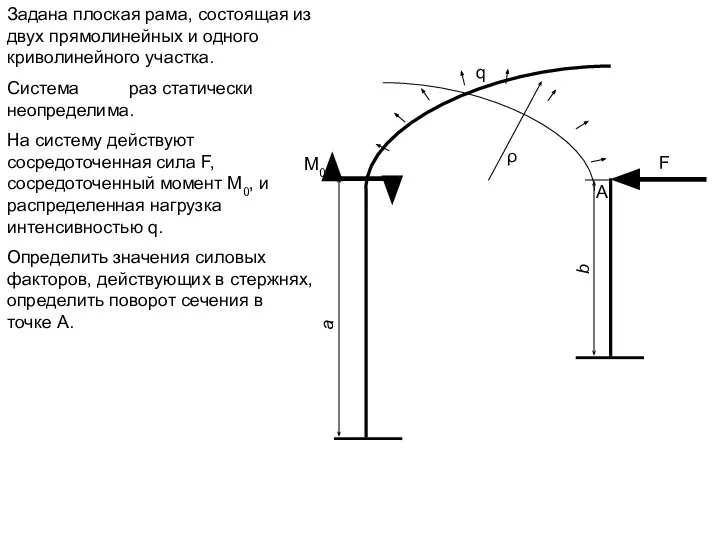
Задана плоская рама, состоящая из двух прямолинейных и одного криволинейного участка.
Система
Задана плоская рама, состоящая из двух прямолинейных и одного криволинейного участка.
Система
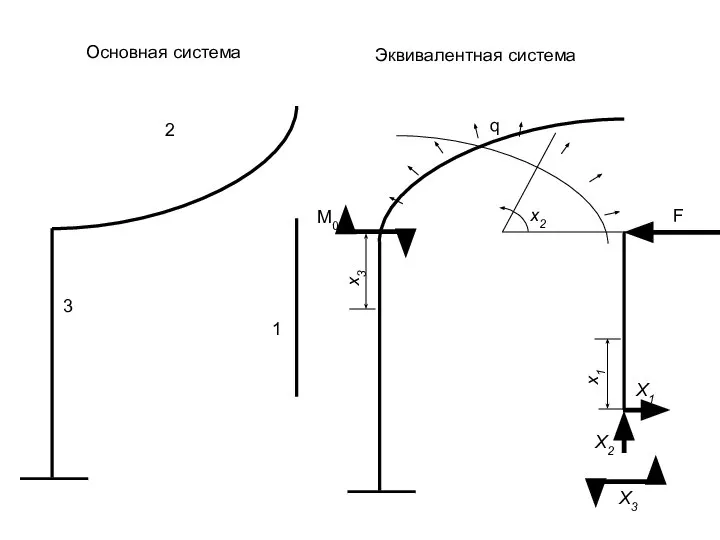
Основная система
Эквивалентная система
1
2
3
Основная система
Эквивалентная система
1
2
3
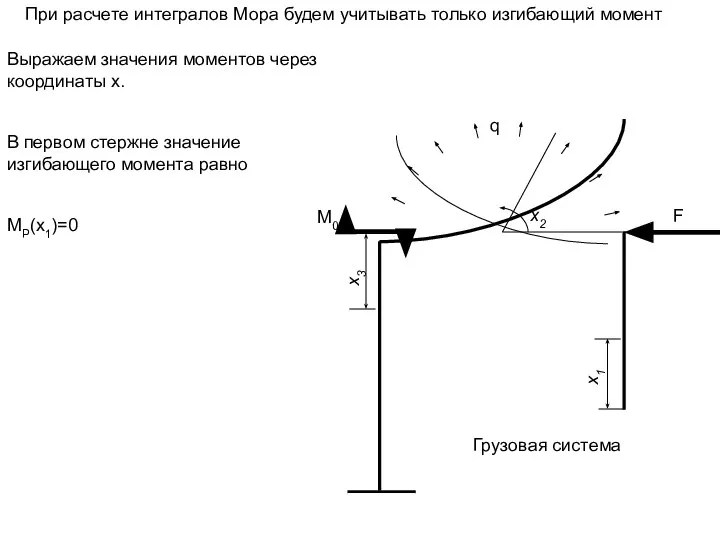
При расчете интегралов Мора будем учитывать только изгибающий момент
Выражаем значения моментов
При расчете интегралов Мора будем учитывать только изгибающий момент
Выражаем значения моментов
F
x2
Во втором стержне момент будет складываться из момента от силы F
F
x2
Во втором стержне момент будет складываться из момента от силы F
x3
x1
F
M0
q
x2
На участке третьего стержня момент будет складываться из моментов от силы
x3
x1
F
M0
q
x2
На участке третьего стержня момент будет складываться из моментов от силы
x3
x1
X1=1
x2
От единичной силы, направленной по направлению силы X1, моменты в стержнях
x3
x1
X1=1
x2
От единичной силы, направленной по направлению силы X1, моменты в стержнях
x3
x1
X2=1
x2
От единичной силы, направленной по направлению силы X2, моменты в стержнях
x3
x1
X2=1
x2
От единичной силы, направленной по направлению силы X2, моменты в стержнях
x3
x1
X3=1
x2
От единичной силы, направленной по направлению силы X1, моменты в стержнях
x3
x1
X3=1
x2
От единичной силы, направленной по направлению силы X1, моменты в стержнях
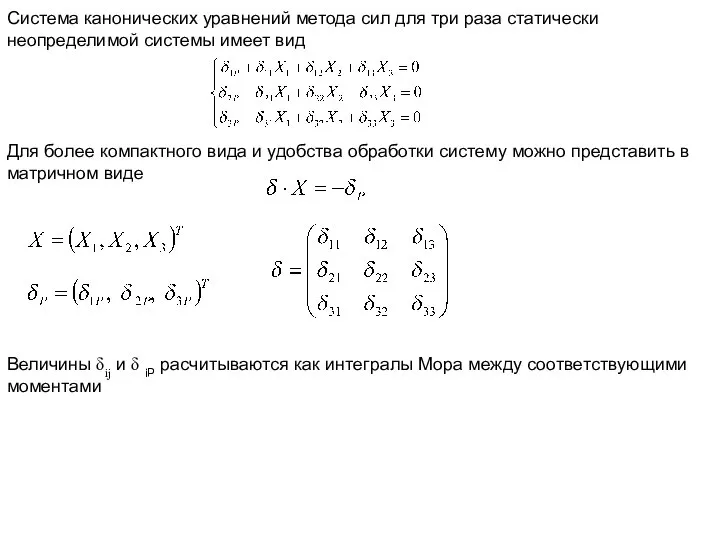
Система канонических уравнений метода сил для три раза статически неопределимой системы
Система канонических уравнений метода сил для три раза статически неопределимой системы
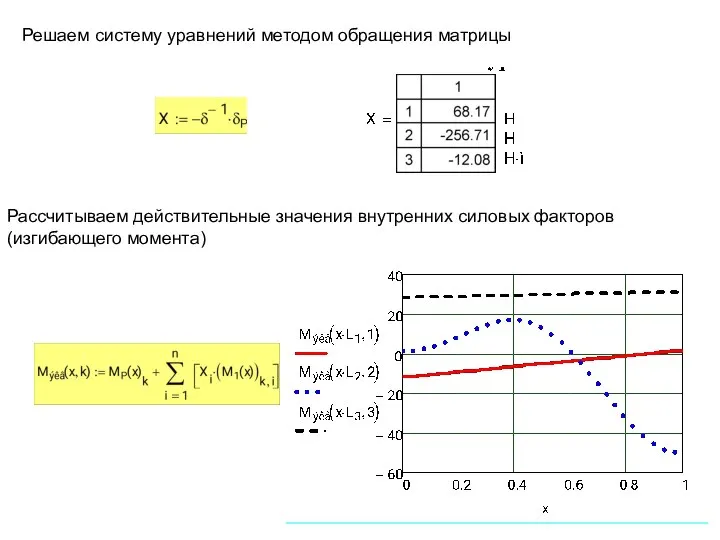
Решаем систему уравнений методом обращения матрицы
Рассчитываем действительные значения внутренних силовых факторов
Решаем систему уравнений методом обращения матрицы
Рассчитываем действительные значения внутренних силовых факторов
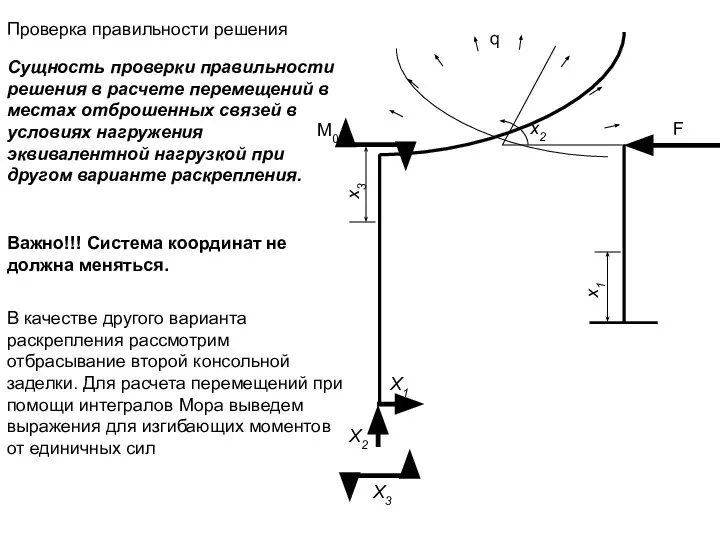
Проверка правильности решения
Сущность проверки правильности решения в расчете перемещений в местах
Проверка правильности решения
Сущность проверки правильности решения в расчете перемещений в местах
x3
x1
X1=1
x2
От единичной силы, направленной по направлению силы X1, моменты в стержнях
x3
x1
X1=1
x2
От единичной силы, направленной по направлению силы X1, моменты в стержнях
x3
x1
X2=1
x2
От единичной силы, направленной по направлению силы X2, моменты в стержнях
x3
x1
X2=1
x2
От единичной силы, направленной по направлению силы X2, моменты в стержнях
x3
x1
X3=1
x2
От единичной силы, направленной по направлению силы X3, моменты в стержнях
x3
x1
X3=1
x2
От единичной силы, направленной по направлению силы X3, моменты в стержнях
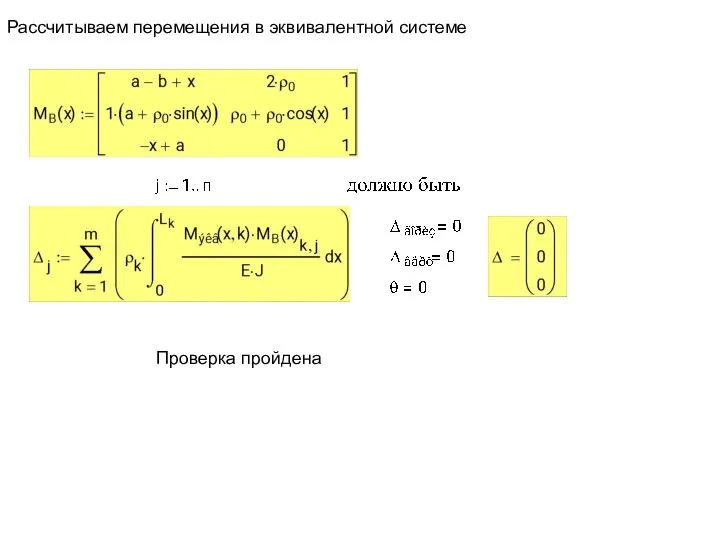
Рассчитываем перемещения в эквивалентной системе
Проверка пройдена
Рассчитываем перемещения в эквивалентной системе
Проверка пройдена
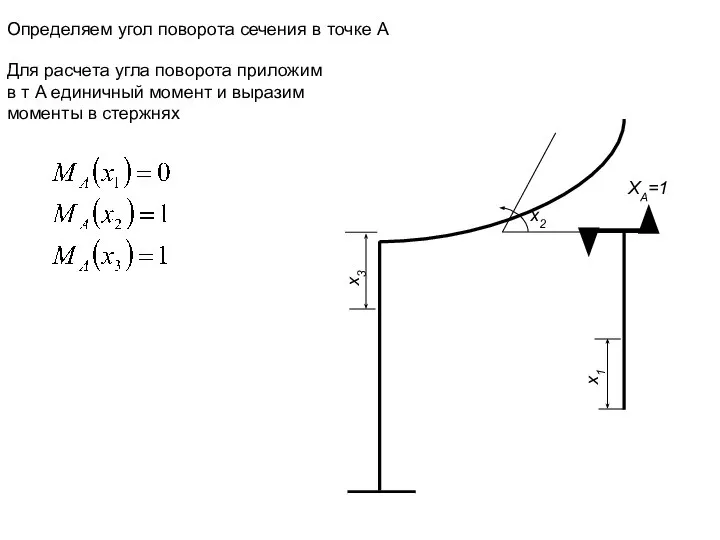
Определяем угол поворота сечения в точке А
Для расчета угла поворота приложим
Определяем угол поворота сечения в точке А
Для расчета угла поворота приложим
 Статика. Равновесие тел
Статика. Равновесие тел Тепломассообмен. Вынужденная конвекция
Тепломассообмен. Вынужденная конвекция Презентація на тему: “Механічна робота. Потужність” Учня 10-А класу ЗОШ №25 м. Луцька Матвійчука Романа Зберігайте, будь-ласка, тишу !!! Умійте цінувати працю інших людей.
Презентація на тему: “Механічна робота. Потужність” Учня 10-А класу ЗОШ №25 м. Луцька Матвійчука Романа Зберігайте, будь-ласка, тишу !!! Умійте цінувати працю інших людей.  Обработка экспериментальных данных. Часть 2
Обработка экспериментальных данных. Часть 2 Измельчение в воздушном потоке
Измельчение в воздушном потоке Дисперсия света
Дисперсия света Презентация по физике Тепловое излучение
Презентация по физике Тепловое излучение  Применение аккумуляторов
Применение аккумуляторов Учитель физики МОУ «СОШ с. Агафоновка Питерского района Саратовской области» Дзюрич Елена Алексеевна
Учитель физики МОУ «СОШ с. Агафоновка Питерского района Саратовской области» Дзюрич Елена Алексеевна  Открытие радиоактивности. Радиоактивные превращения СОСТАВИЛА УЧИТЕЛЬ ФИЗИКИ МБОУ МСОШ: МУХИНА ВАЛЕНТИНА ВЛАДИМИРОВНА ФИЗИКА
Открытие радиоактивности. Радиоактивные превращения СОСТАВИЛА УЧИТЕЛЬ ФИЗИКИ МБОУ МСОШ: МУХИНА ВАЛЕНТИНА ВЛАДИМИРОВНА ФИЗИКА  Презентация по физике "Электромагнетизм" - скачать
Презентация по физике "Электромагнетизм" - скачать  Электропроводность диэлектриков
Электропроводность диэлектриков Атомная физика
Атомная физика Твердотельные реле
Твердотельные реле Магнитное поле. Действие магнитного поля на электрический заряд и опыты, иллюстрирующее это действие. Магнитная индукция
Магнитное поле. Действие магнитного поля на электрический заряд и опыты, иллюстрирующее это действие. Магнитная индукция Исходные понятия и определения термодинамики и молекулярной физики
Исходные понятия и определения термодинамики и молекулярной физики Линзы. Построение. (8 класс)
Линзы. Построение. (8 класс) Ионизирующее излучение: термины, понятия, механизмы
Ионизирующее излучение: термины, понятия, механизмы Презентация по физике "Электрический ток в жидкостях" - скачать бесплатно
Презентация по физике "Электрический ток в жидкостях" - скачать бесплатно Энергия электрического поля
Энергия электрического поля Исследование цепей электрического тока в разных средах моделирования
Исследование цепей электрического тока в разных средах моделирования Выходные устройства (ВУ)
Выходные устройства (ВУ) Расчет сопротивления проводников
Расчет сопротивления проводников Сообщающиеся сосуды
Сообщающиеся сосуды Измерение температуры
Измерение температуры Исследование методов преобразования сигналов для систем с OFDM
Исследование методов преобразования сигналов для систем с OFDM Взаимодействие заряженных тел
Взаимодействие заряженных тел Строение формаций. Форма залежей. (Лекция 3)
Строение формаций. Форма залежей. (Лекция 3)