- Теоретическая (техническая) механика

Содержание
- 2. Теоретическая (классическая механика) - это наука, в которой изучаются общие свойства движения и равновесия материальных тел.
- 3. Сопротивление материалов –наука, в которой изучается поведение твердых деформируемых тел при различных видах нагружения Задачи -
- 4. Структура курса теоретической механики и связь ее с другими дисциплинами В. математика Теоретическая механика Статика Кинетика
- 5. СТАТИКА Сила - это количественная мера взаимодействия материальных тел. Действие силы определяется тремя факторами: величиной (модулем),
- 6. Система сил - это любая совокупность сил, действующая на данный объект Основные задачи статики: 1. Приведение
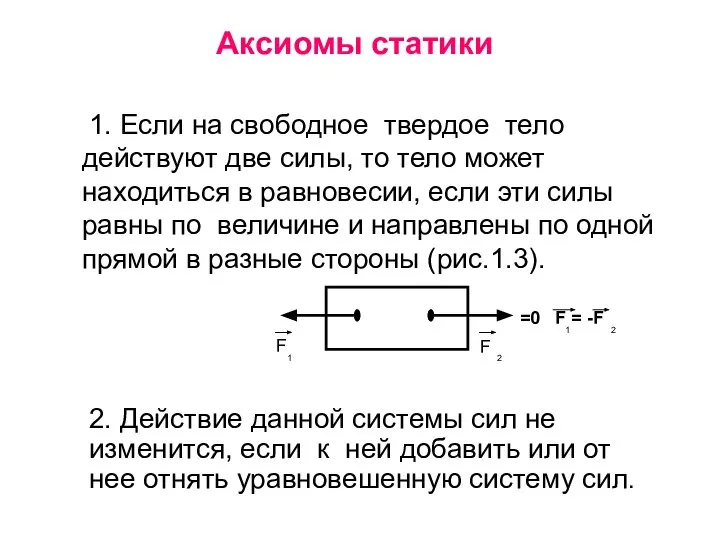
- 7. Аксиомы статики 1. Если на свободное твердое тело действуют две силы, то тело может находиться в
- 8. 3. Аксиома параллелограмма. Вектор R называется геометрической суммой этих сил. Модуль его можно найти, применяя теорему
- 9. Аксиома 4 Два тела взаимодействуют с силами, равными по величине и противоположными по направлению . Это
- 10. Связи и их реакции . Свободным называется тело, которое не связано с другими телами и может
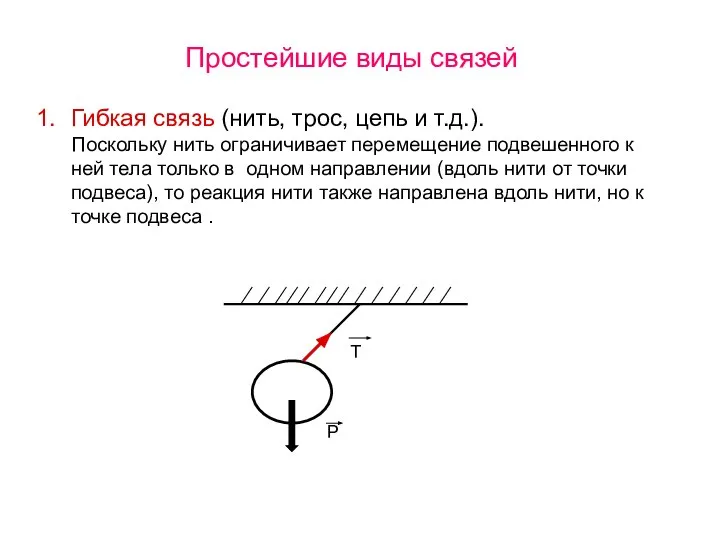
- 11. Простейшие виды связей Гибкая связь (нить, трос, цепь и т.д.). Поскольку нить ограничивает перемещение подвешенного к
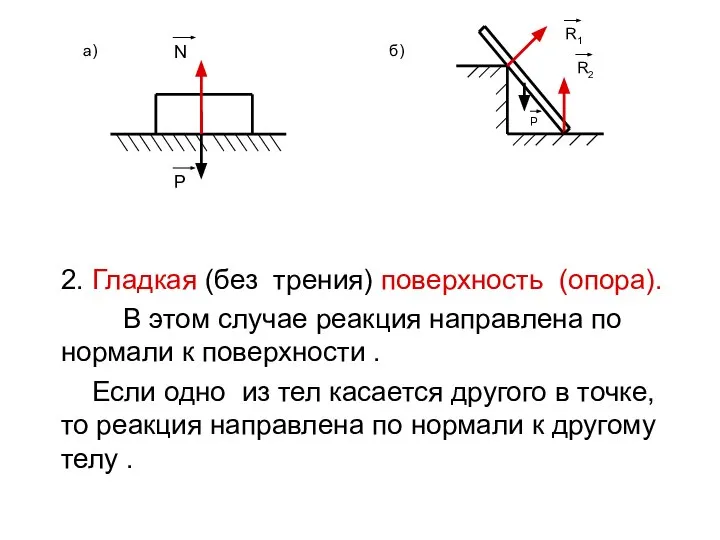
- 12. 2. Гладкая (без трения) поверхность (опора). В этом случае реакция направлена по нормали к поверхности .
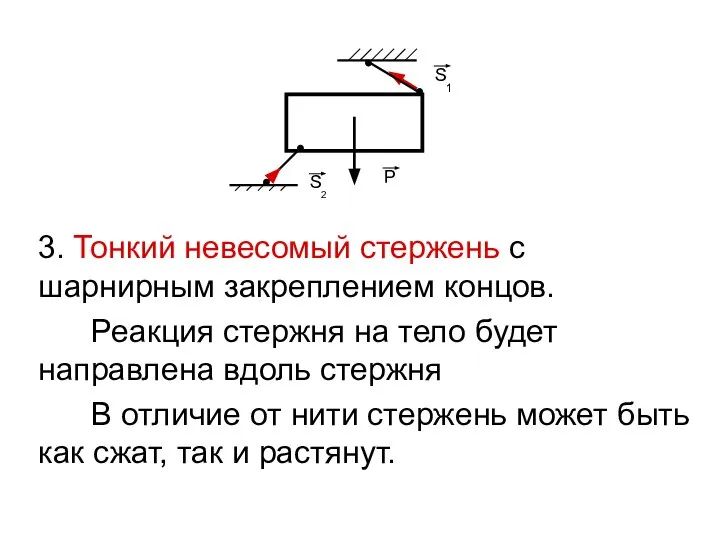
- 13. 3. Тонкий невесомый стержень с шарнирным закреплением концов. Реакция стержня на тело будет направлена вдоль стержня
- 14. Принцип (аксиома) отбрасывания связей: каждое несвободное тело можно считать свободным, если отбросить связи и заменить их
- 15. Сложить две силы можно, используя аксиому параллелограмма сил, строя диагональ параллелограмма на этих силах, как на
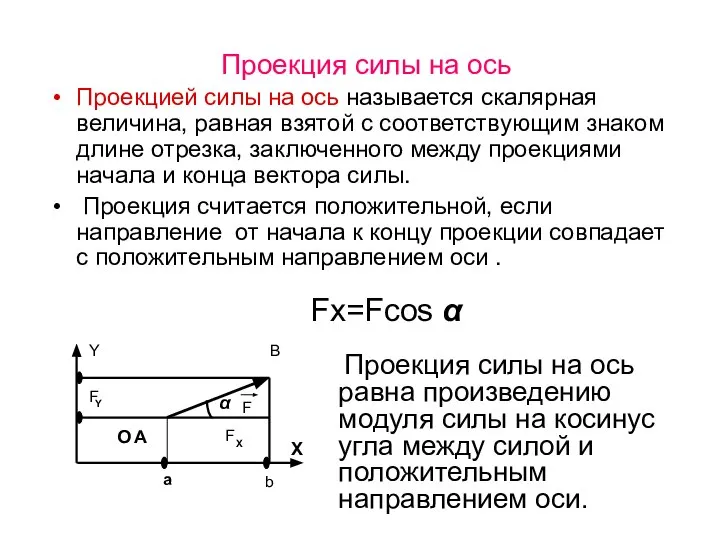
- 16. Проекция силы на ось Проекцией силы на ось называется скалярная величина, равная взятой с соответствующим знаком
- 17. Зная величины проекций силы на взаимно перпендикулярные оси Х, У и Z, модуль силы можно вычислить,
- 18. Аналитический способ сложения сил Из рисунка видно, что проекция вектора суммы сил равна сумме проекций сил
- 19. Сходящаяся система сил Это система сил, линии действия которых пересекаются в одной точке А Можно последовательно
- 20. Вторая задача статики - разработка условий равновесия. Они могут быть получены в двух видах: Геометрическое условие.
- 21. Если все силы лежат в одной плоскости (плоская сходящаяся система сил), остаются два значащих уравнения ΣFкx=0;
- 22. Плоская произвольная ситема сип Это система сил, как угодно расположенных в одной плоскости Для данной системы
- 23. Для характеристики вращательного действия силы вводится понятие момента силы относительно точки. Алгебраическим моментом силы относительно точки
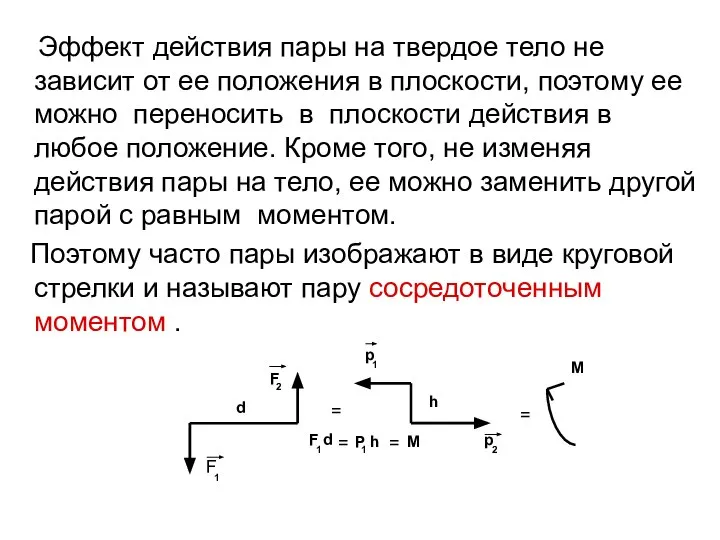
- 24. Пара сил и ее свойства Парой сил называется система, состоящая из двух сил, равных по модулю,
- 25. Сумма сил пары равна нулю, поэтому пара сил не имеет равнодействующей, однако она оказывает на тело
- 26. Эффект действия пары на твердое тело не зависит от ее положения в плоскости, поэтому ее можно
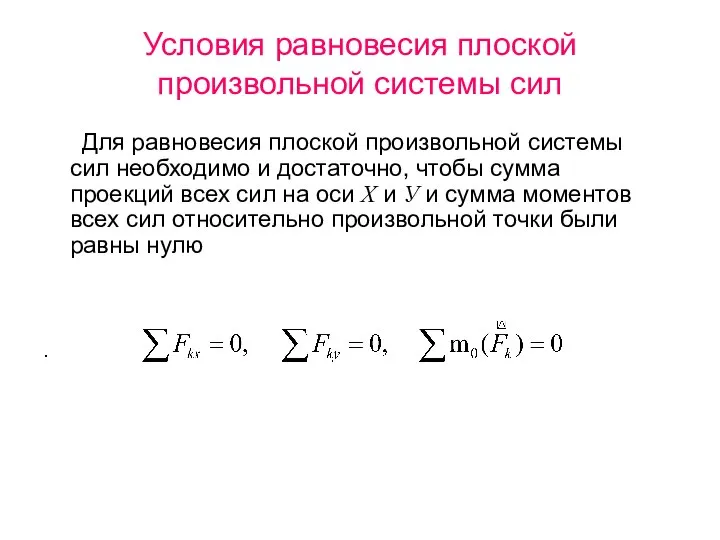
- 27. Условия равновесия плоской произвольной системы сил Для равновесия плоской произвольной системы сил необходимо и достаточно, чтобы
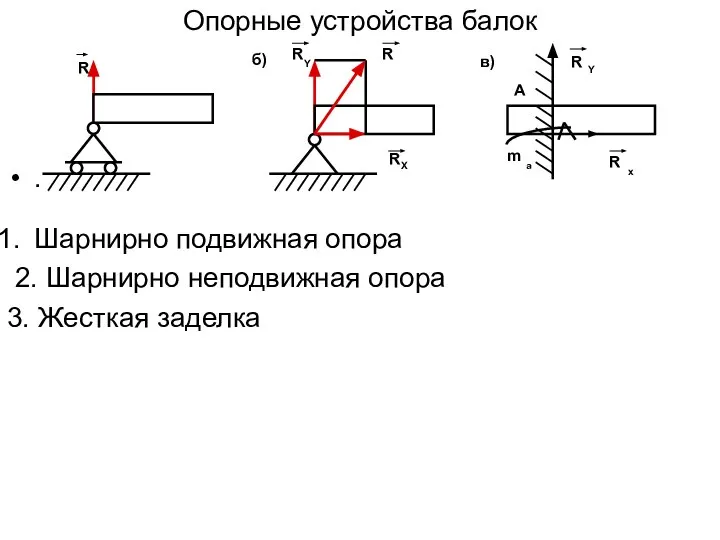
- 28. Опорные устройства балок . Шарнирно подвижная опора 2. Шарнирно неподвижная опора 3. Жесткая заделка R R
- 30. Скачать презентацию
Теоретическая (классическая механика) - это наука, в которой изучаются общие свойства
Теоретическая (классическая механика) - это наука, в которой изучаются общие свойства
Сопротивление материалов –наука, в которой изучается поведение твердых деформируемых тел при
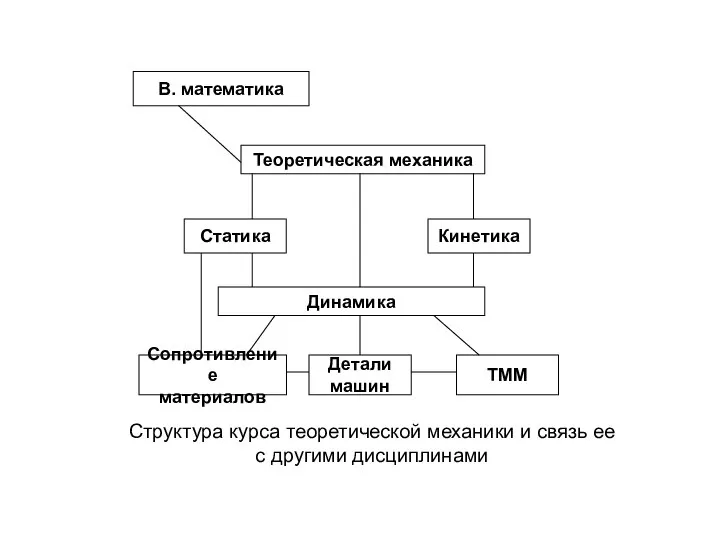
Структура курса теоретической механики и связь ее
с другими дисциплинами
В.
Структура курса теоретической механики и связь ее
с другими дисциплинами
В.
СТАТИКА
Сила - это количественная мера взаимодействия материальных тел.
Действие
СТАТИКА
Сила - это количественная мера взаимодействия материальных тел.
Действие
Система сил - это любая совокупность сил, действующая на данный объект
Система сил - это любая совокупность сил, действующая на данный объект
Аксиомы статики
1. Если на свободное твердое тело действуют две
Аксиомы статики
1. Если на свободное твердое тело действуют две
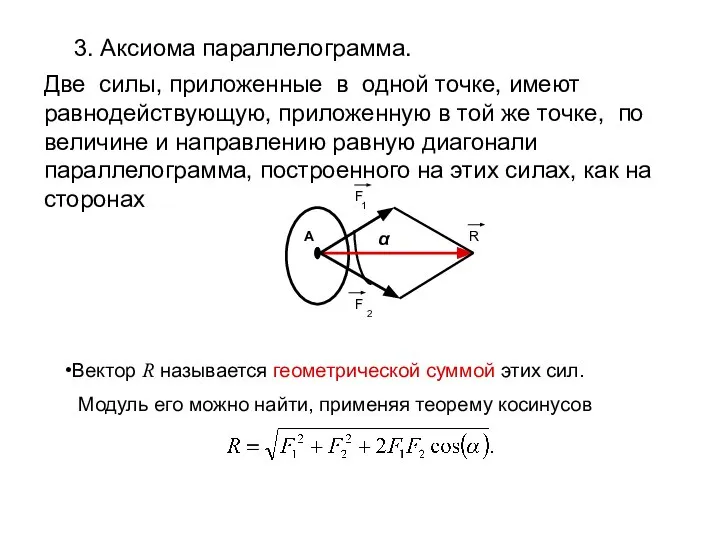
3. Аксиома параллелограмма.
Вектор R называется геометрической суммой этих сил.
Модуль
3. Аксиома параллелограмма.
Вектор R называется геометрической суммой этих сил.
Модуль
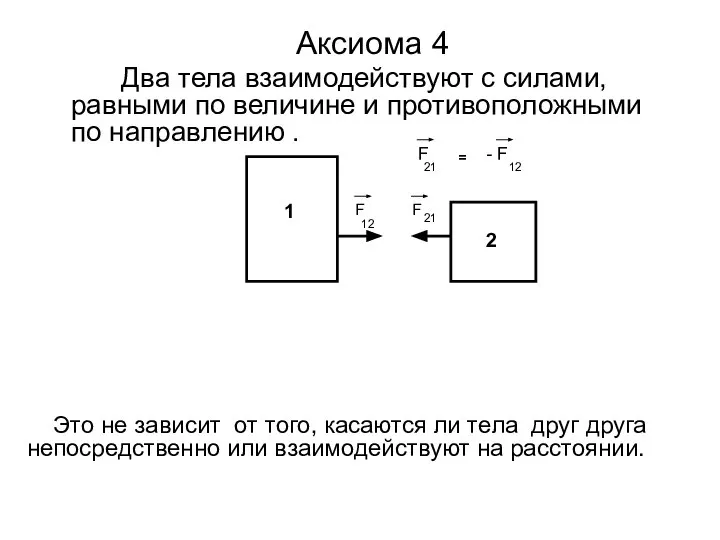
Аксиома 4
Два тела взаимодействуют с силами, равными по величине
Аксиома 4
Два тела взаимодействуют с силами, равными по величине
Связи и их реакции
. Свободным называется тело, которое не связано
Связи и их реакции
. Свободным называется тело, которое не связано
Простейшие виды связей
Гибкая связь (нить, трос, цепь и т.д.).
Поскольку
Простейшие виды связей
Гибкая связь (нить, трос, цепь и т.д.).
Поскольку
2. Гладкая (без трения) поверхность (опора).
В этом случае реакция
2. Гладкая (без трения) поверхность (опора).
В этом случае реакция
3. Тонкий невесомый стержень с шарнирным закреплением концов.
Реакция стержня на
3. Тонкий невесомый стержень с шарнирным закреплением концов.
Реакция стержня на
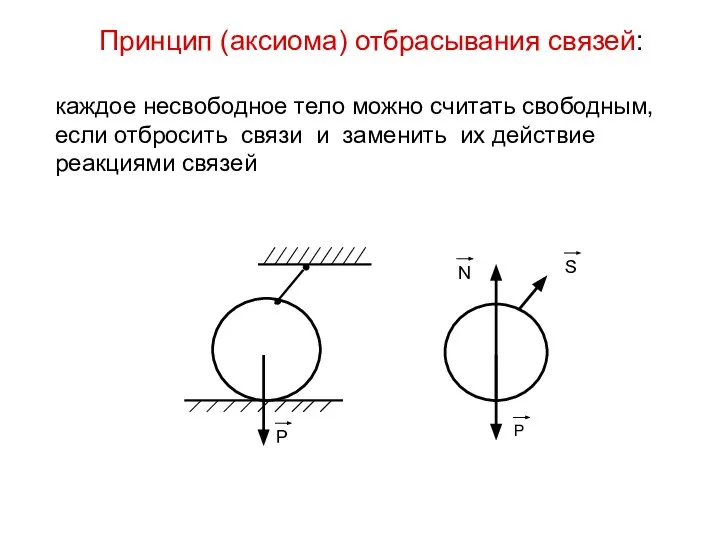
Принцип (аксиома) отбрасывания связей:
каждое несвободное тело можно считать свободным, если
Принцип (аксиома) отбрасывания связей:
каждое несвободное тело можно считать свободным, если
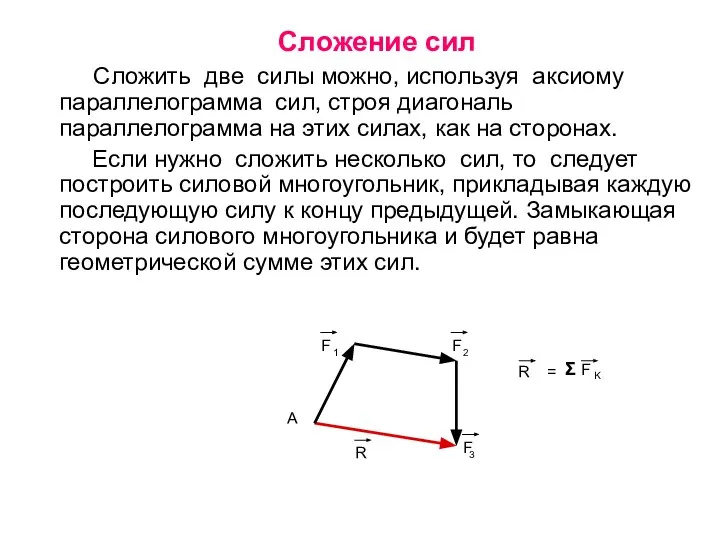
Сложить две силы можно, используя аксиому параллелограмма сил, строя диагональ
Сложить две силы можно, используя аксиому параллелограмма сил, строя диагональ
Проекция силы на ось
Проекцией силы на ось называется скалярная величина, равная
Проекцией силы на ось называется скалярная величина, равная
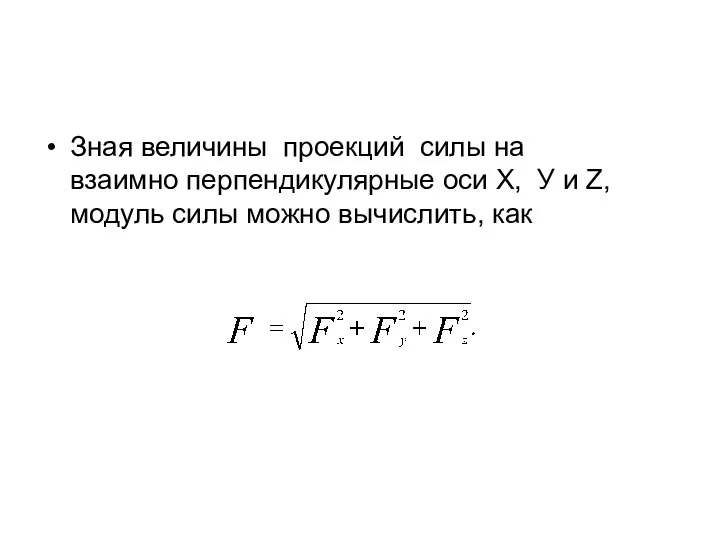
Зная величины проекций силы на взаимно перпендикулярные оси Х, У и
Зная величины проекций силы на взаимно перпендикулярные оси Х, У и
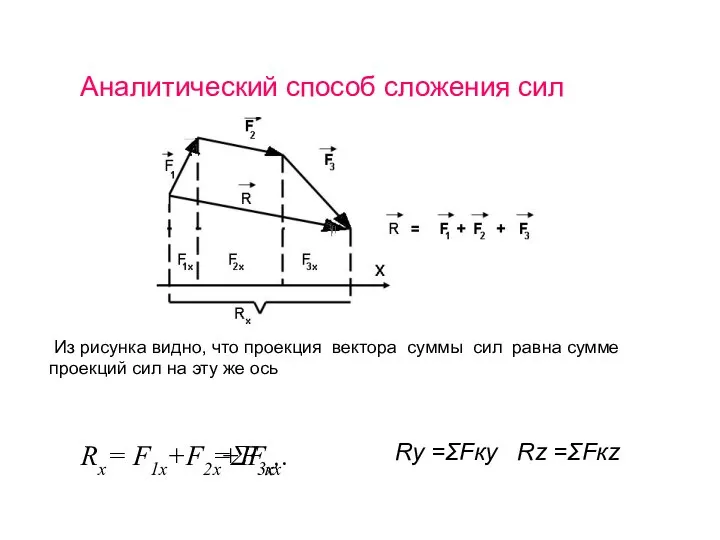
Аналитический способ сложения сил
Из рисунка видно, что проекция вектора
Аналитический способ сложения сил
Из рисунка видно, что проекция вектора
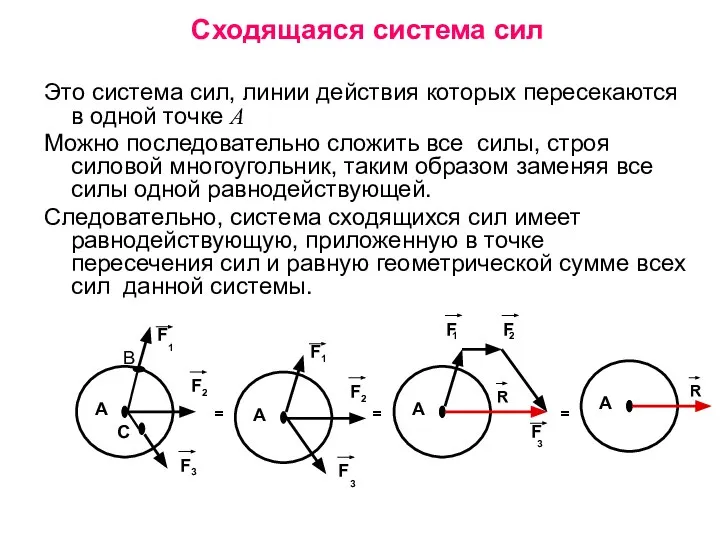
Сходящаяся система сил
Это система сил, линии действия которых пересекаются в
Сходящаяся система сил
Это система сил, линии действия которых пересекаются в
Вторая задача статики - разработка условий равновесия.
Они могут быть получены
Вторая задача статики - разработка условий равновесия.
Они могут быть получены
Если все силы лежат в одной плоскости (плоская сходящаяся система сил),
Если все силы лежат в одной плоскости (плоская сходящаяся система сил),
Плоская произвольная ситема сип
Это система сил, как угодно расположенных в одной
Плоская произвольная ситема сип
Это система сил, как угодно расположенных в одной
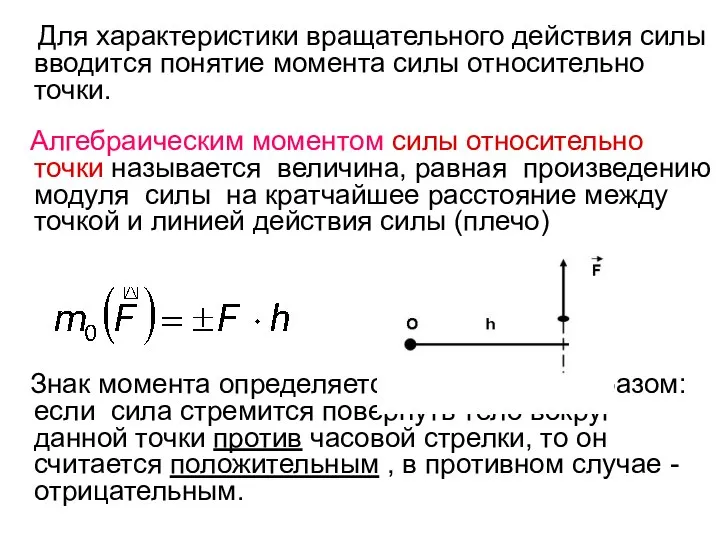
Для характеристики вращательного действия силы вводится понятие момента силы относительно
Для характеристики вращательного действия силы вводится понятие момента силы относительно
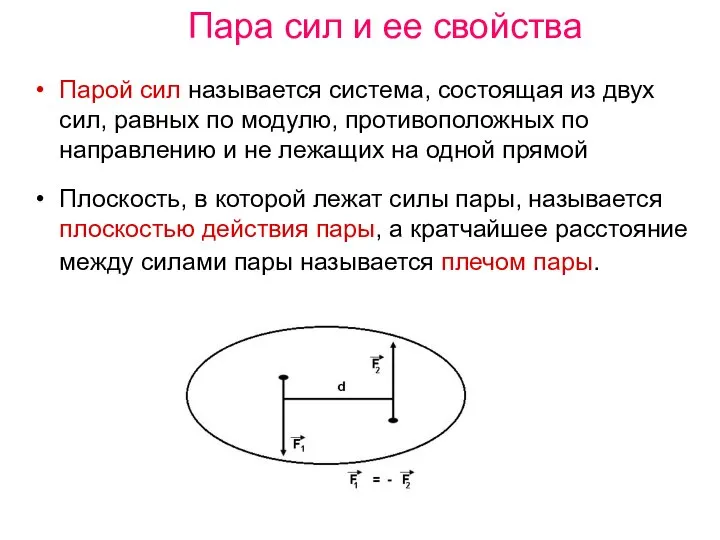
Пара сил и ее свойства
Парой сил называется система, состоящая из
Пара сил и ее свойства
Парой сил называется система, состоящая из
Сумма сил пары равна нулю, поэтому пара сил не имеет
Сумма сил пары равна нулю, поэтому пара сил не имеет
Эффект действия пары на твердое тело не зависит от ее
Эффект действия пары на твердое тело не зависит от ее
Условия равновесия плоской произвольной системы сил
Для равновесия плоской произвольной системы
Условия равновесия плоской произвольной системы сил
Для равновесия плоской произвольной системы
Опорные устройства балок
.
Шарнирно подвижная опора
2. Шарнирно неподвижная опора
3.
Опорные устройства балок
.
Шарнирно подвижная опора
2. Шарнирно неподвижная опора
3.
 План трассы. Вписывание круговых кривых с переходными кривыми
План трассы. Вписывание круговых кривых с переходными кривыми Презентация по физике "Системы цветопередачи" - скачать
Презентация по физике "Системы цветопередачи" - скачать  Внесок українських вчених у розвиток науки. Історія фізики
Внесок українських вчених у розвиток науки. Історія фізики Молекуляроно-кинетическая теория
Молекуляроно-кинетическая теория Делимость электрического заряда. Электрон
Делимость электрического заряда. Электрон Оборудование АЭС
Оборудование АЭС Кроссворды по физике
Кроссворды по физике Магнитооптика ферромагнитных металлов
Магнитооптика ферромагнитных металлов Презентация по физике Молекулярная физика и термодинамика
Презентация по физике Молекулярная физика и термодинамика  Последовательное соединение проводников
Последовательное соединение проводников Кривошипно-шатунный механизм. Назначение
Кривошипно-шатунный механизм. Назначение ПЕРВОЕ НАЧАЛО ТЕРМОДИНАМИКИ. ВНУТРЕННЯЯ ЭНЕРГИЯ. РАБОТА И ТЕПЛОТА 1. Внутренняя энергия. Работа и теплота 2. Теплоёмкость идеал
ПЕРВОЕ НАЧАЛО ТЕРМОДИНАМИКИ. ВНУТРЕННЯЯ ЭНЕРГИЯ. РАБОТА И ТЕПЛОТА 1. Внутренняя энергия. Работа и теплота 2. Теплоёмкость идеал Идеальный газ в молекулярно-кинетической теории. Среднее значение квадрата скорости молекул
Идеальный газ в молекулярно-кинетической теории. Среднее значение квадрата скорости молекул Sbs – silicon bidirectional switch
Sbs – silicon bidirectional switch Тест по физике Выполнил ученик 11 «А» класса Серый Константин
Тест по физике Выполнил ученик 11 «А» класса Серый Константин Тепловые электростанции
Тепловые электростанции  Сохранение импульса. Момент сил. Силы инерции. (Лекция 6)
Сохранение импульса. Момент сил. Силы инерции. (Лекция 6) Сила пружності. Закон Гука
Сила пружності. Закон Гука Математические модели и методы оптимизации процессов пространственного маневрирования морских подвижных объектов
Математические модели и методы оптимизации процессов пространственного маневрирования морских подвижных объектов Урок технологии 5 класс раздел: Элементы машиноведения
Урок технологии 5 класс раздел: Элементы машиноведения Лекция 2. Моделирование технологических процессов. Аналитические аппроксимации распределения ионов
Лекция 2. Моделирование технологических процессов. Аналитические аппроксимации распределения ионов Соединения деталей машин Соединения деталей машин Сварные соединения Классификация и разновидности сварных соединений (швов) С
Соединения деталей машин Соединения деталей машин Сварные соединения Классификация и разновидности сварных соединений (швов) С Строение и свойства кристаллических тел
Строение и свойства кристаллических тел Физика колебаний
Физика колебаний Соединение проводников
Соединение проводников Применение первого закона термодинамики к различным процессам
Применение первого закона термодинамики к различным процессам Изучение конструкции и исследование цилиндрическими редуктора зубчатыми колесами
Изучение конструкции и исследование цилиндрическими редуктора зубчатыми колесами Физика в мультфильмах
Физика в мультфильмах