- Теория автоматического управления

Содержание
- 2. План курса 1.Комплексные числа (напоминание). 2.Общие сведения о системах управления. 3. Математические модели. 4. Типовые динамические
- 3. Комплексные числа
- 4. Теория автоматического управления (ТАУ): 1.Принцип управления (как нужно управлять). 2.Математические модели. 3.Устойчивость работы. 4.Качество управления.
- 5. Общие сведения о системах управления
- 6. Система управления (из чего состоит?)
- 7. Система управления (регулятор)
- 8. Система управления (из чего состоит?)
- 9. Классификация систем управления (СУ по отклонению)
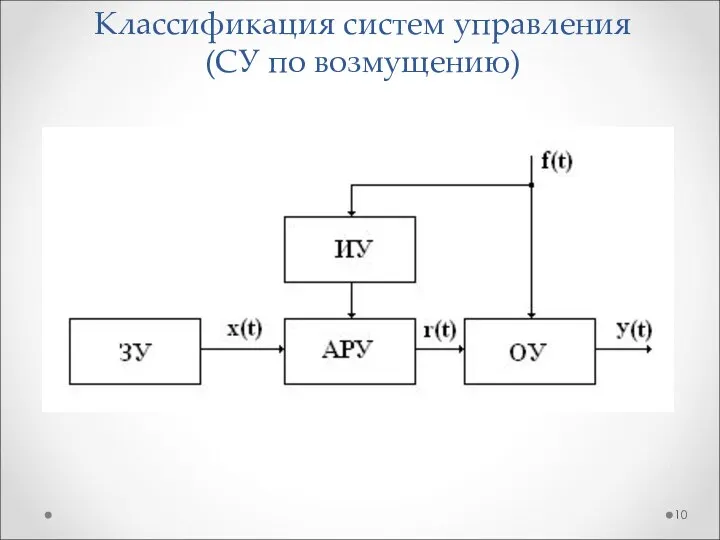
- 10. Классификация систем управления (СУ по возмущению)
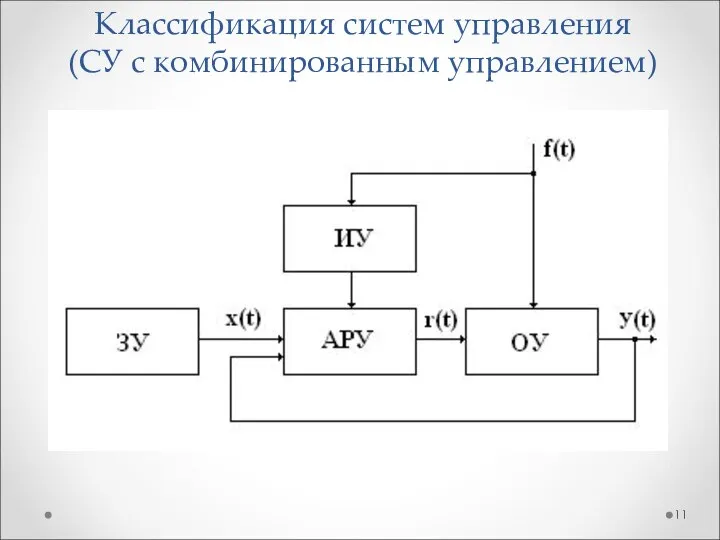
- 11. Классификация систем управления (СУ с комбинированным управлением)
- 12. Классификация систем управления (адаптивная СУ)
- 13. Классификация систем управления (Уровень автоматизации) Системы управления Автоматические Автоматизированные
- 14. Классификация систем управления (Задачи систем управления) Системы управления Стабилизация Программное управление Слежение
- 15. Классификация систем управления (По количеству входов и выходов) Системы управления Одномерные Многомерные
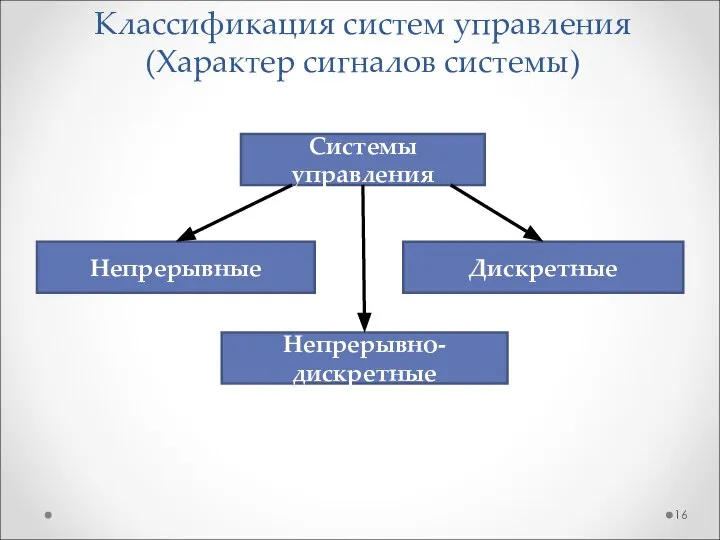
- 16. Классификация систем управления (Характер сигналов системы) Системы управления Непрерывные Дискретные Непрерывно-дискретные
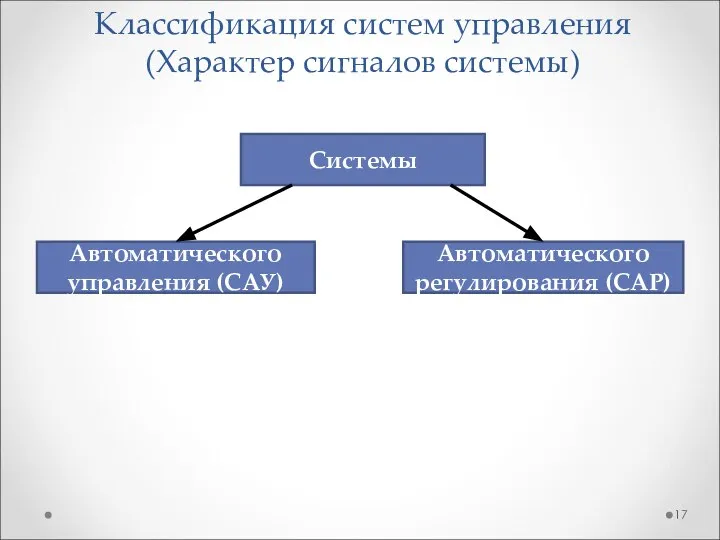
- 17. Классификация систем управления (Характер сигналов системы) Системы Автоматического управления (САУ) Автоматического регулирования (САР)
- 18. Математические модели
- 19. Линейность и нелинейность Цель любого управления – изменить состояние объекта нужным образом. Модель – это объект,
- 20. Описание элементов Способы описания динамических свойств: Дифференциальные уравнения; Передаточные функции W(p); Временные функции; Частотные характеристики. Режимы
- 21. Дифференциальные уравнения Здесь: y(t) – временная функция выходного сигнала; x(t) – временная функция входного сигнала; y(j)(t)
- 22. Передаточная функция Передаточная функция W(p) есть отношение выходного сигнала к входному сигналу, представленное в операторной форме:
- 23. Переходная характеристика Единичный ступеньчатый сигнал
- 24. Импульсная характеристика (весовая функция) Единичный импульсный сигнал
- 25. Разложение дроби на сумму элементарных дробей Имеем рациональную дробь R(x) вида: где степени m>n. Дробь такого
- 26. Таблица оригиналов и изображений (обратное/прямое преобразование Лапласа)
- 27. Частотные характеристики Частотные характеристики САУ характеризуют реакцию систем на синусоидальное входное воздействие в установившемся режиме. Частотные
- 28. Частотные характеристики Зная передаточную функцию W(p), можно получить амплитудно-фазовую частотную характеристику, путем замены оператора Лапласа –
- 29. Логарифмические частотные характеристики - ось ординат - ось абсцисс ЛАЧХ - ось ординат - ось абсцисс
- 30. Типовые динамические звенья
- 31. Усилитель - Передаточная функция - Переходная характеристика - Импульсная характеристика - АЧХ - ФЧХ, ЛФЧХ -
- 32. Апериодическое звено - Передаточная функция - Переходная характеристика - Импульсная характеристика - АФЧХ - ЛАЧХ
- 33. Апериодическое звено Переходная характеристика Импульсная характеристика АФЧХ ЛАЧХ ЛФЧХ
- 34. Колебательное звено - Передаточная функция - АФЧХ - ЛАЧХ
- 35. Колебательное звено Переходная характеристика Импульсная характеристика АФЧХ ЛАЧХ ЛФЧХ
- 36. Интегрирующее звено - Передаточная функция - Переходная характеристика - Импульсная характеристика - АФЧХ - ЛАЧХ
- 37. Интегрирующее звено Переходная характеристика Импульсная характеристика АФЧХ ЛАЧХ ЛФЧХ
- 38. Идеально дифференцирующее звено - Передаточная функция - Переходная характеристика - Импульсная характеристика - АФЧХ - ЛАЧХ
- 39. Идеально дифференцирующее звено Переходная характеристика АФЧХ ЛАЧХ ЛФЧХ
- 40. Форсирующее звено - Передаточная функция - Переходная характеристика Физически не реализуемое - АФЧХ - ЛАЧХ
- 41. Форсирующее звено Переходная характеристика АФЧХ ЛАЧХ ЛФЧХ
- 42. Построение ЛАЧХ Рассмотрим звено второго порядка с передаточной функцией: 1)Представим данную передаточную функцию в виде произведения
- 43. Структурные схемы
- 44. Структурное преобразование схем Разветвление сигнала: Параллельное и последовательное соединение звеньев:
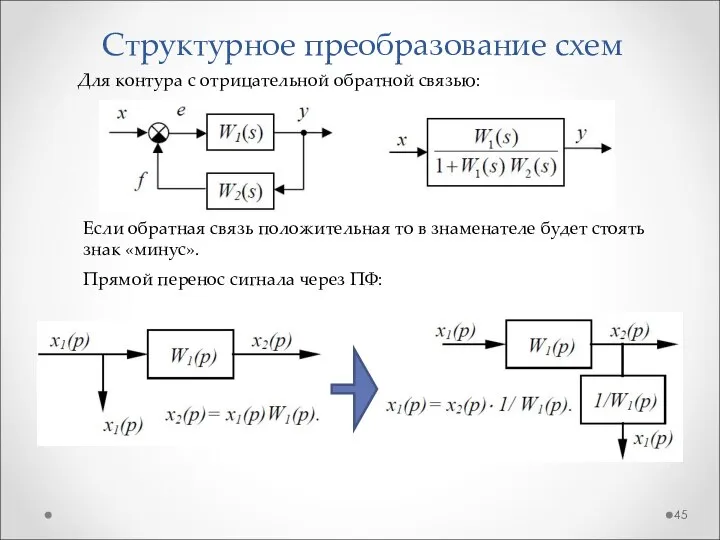
- 45. Структурное преобразование схем Для контура с отрицательной обратной связью: Если обратная связь положительная то в знаменателе
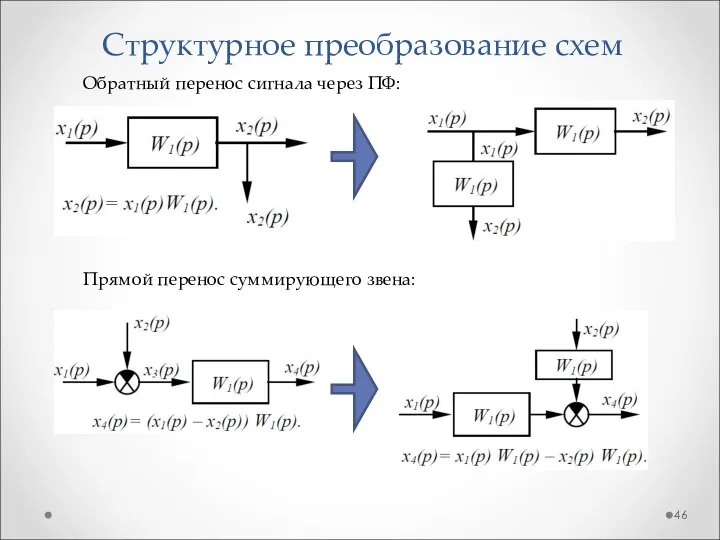
- 46. Структурное преобразование схем Прямой перенос суммирующего звена: Обратный перенос сигнала через ПФ:
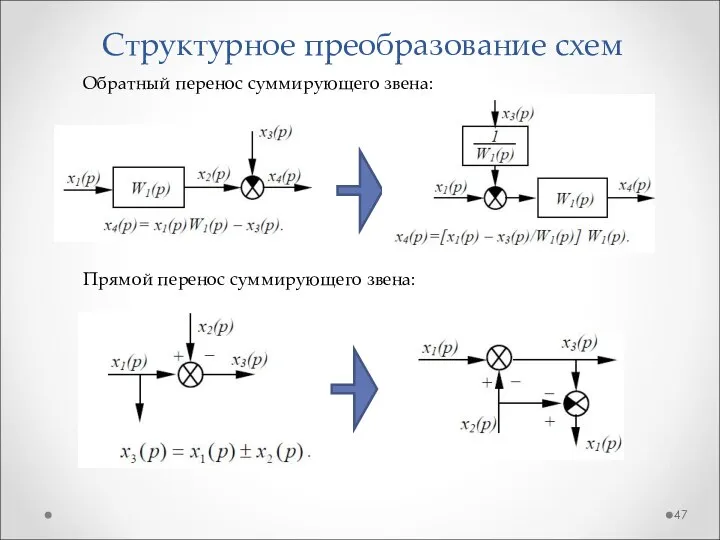
- 47. Структурное преобразование схем Прямой перенос суммирующего звена: Обратный перенос суммирующего звена:
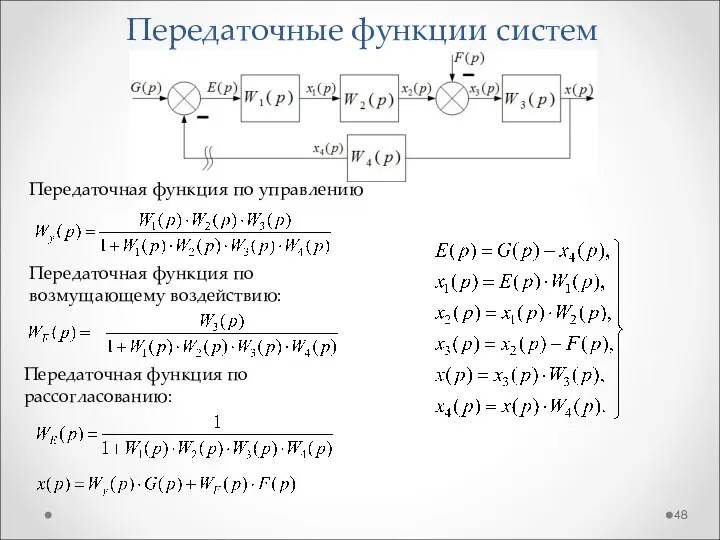
- 48. Передаточные функции систем Передаточная функция по возмущающему воздействию: Передаточная функция по управлению Передаточная функция по рассогласованию:
- 49. Анализ САУ
- 50. Анализ САУ Требования к управлению Точность Качество Устойчивость Работоспособность
- 51. Критерии устойчивости (критерий Гурвица) Пример для полинома пятого порядка (n=5): Все корни полинома Δ(s) имеют отрицательные
- 53. Скачать презентацию
План курса
1.Комплексные числа (напоминание).
2.Общие сведения о системах управления.
3. Математические модели.
4.
План курса
1.Комплексные числа (напоминание).
2.Общие сведения о системах управления.
3. Математические модели.
4.
Комплексные числа
Комплексные числа
Теория автоматического управления (ТАУ):
1.Принцип управления
(как нужно управлять).
2.Математические модели.
3.Устойчивость работы.
4.Качество управления.
Теория автоматического управления (ТАУ):
1.Принцип управления
(как нужно управлять).
2.Математические модели.
3.Устойчивость работы.
4.Качество управления.
Общие сведения о системах управления
Общие сведения о системах управления
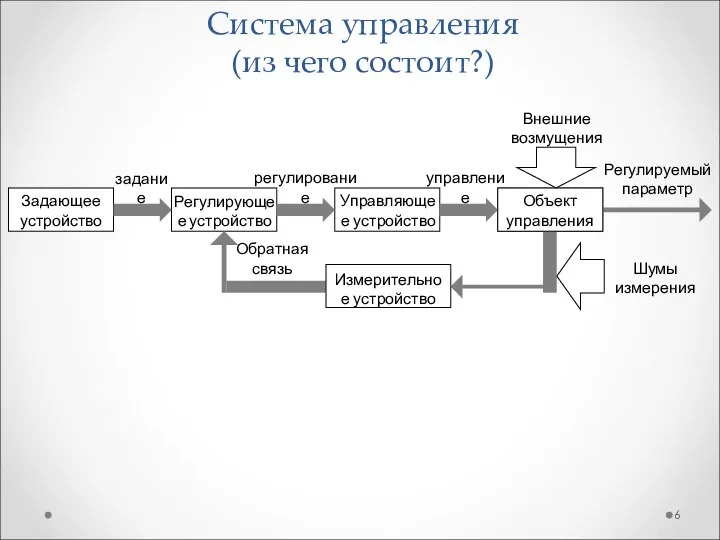
Система управления
(из чего состоит?)
Система управления
(из чего состоит?)
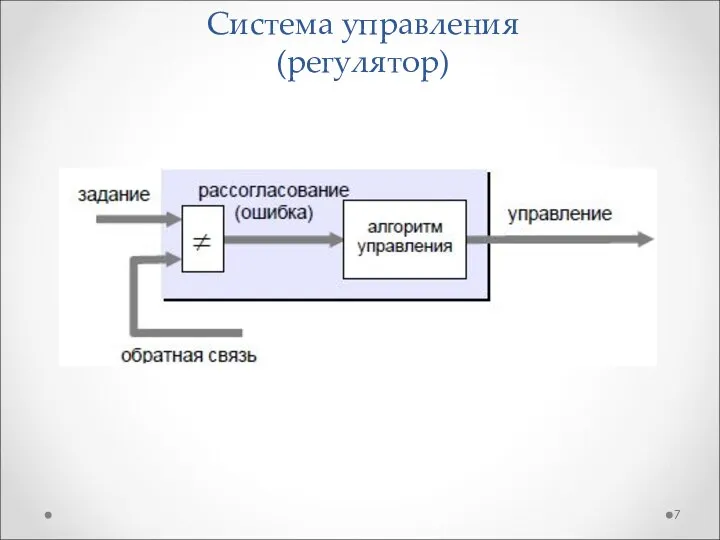
Система управления
(регулятор)
Система управления
(регулятор)
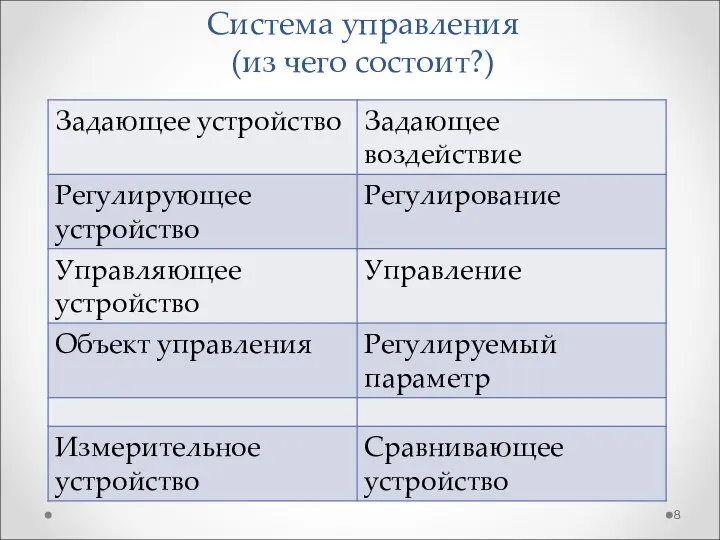
Система управления
(из чего состоит?)
Система управления
(из чего состоит?)
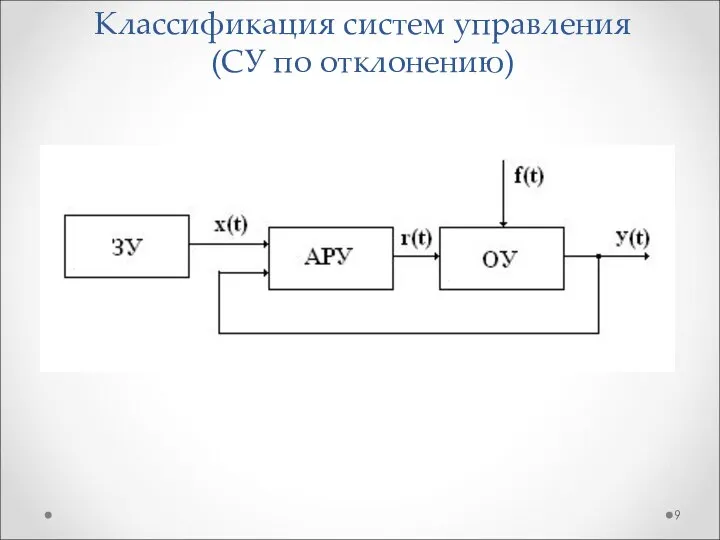
Классификация систем управления
(СУ по отклонению)
Классификация систем управления
(СУ по отклонению)
Классификация систем управления
(СУ по возмущению)
Классификация систем управления
(СУ по возмущению)
Классификация систем управления
(СУ с комбинированным управлением)
Классификация систем управления
(СУ с комбинированным управлением)

Классификация систем управления
(адаптивная СУ)
Классификация систем управления
(адаптивная СУ)
Классификация систем управления
(Уровень автоматизации)
Системы управления
Автоматические
Автоматизированные
Классификация систем управления
(Уровень автоматизации)
Системы управления
Автоматические
Автоматизированные

Классификация систем управления
(Задачи систем управления)
Системы управления
Стабилизация
Программное управление
Слежение
Классификация систем управления
(Задачи систем управления)
Системы управления
Стабилизация
Программное управление
Слежение
Классификация систем управления
(По количеству входов и выходов)
Системы управления
Одномерные
Многомерные
Классификация систем управления
(По количеству входов и выходов)
Системы управления
Одномерные
Многомерные
Классификация систем управления
(Характер сигналов системы)
Системы управления
Непрерывные
Дискретные
Непрерывно-дискретные
Классификация систем управления
(Характер сигналов системы)
Системы управления
Непрерывные
Дискретные
Непрерывно-дискретные
Классификация систем управления
(Характер сигналов системы)
Системы
Автоматического управления (САУ)
Автоматического регулирования (САР)
Классификация систем управления
(Характер сигналов системы)
Системы
Автоматического управления (САУ)
Автоматического регулирования (САР)
Математические модели
Математические модели
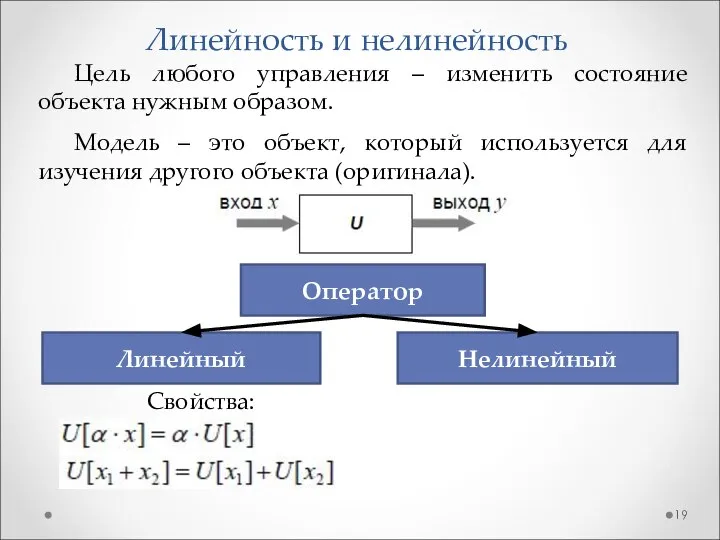
Линейность и нелинейность
Цель любого управления – изменить состояние объекта нужным образом.
Модель
Линейность и нелинейность
Цель любого управления – изменить состояние объекта нужным образом.
Модель
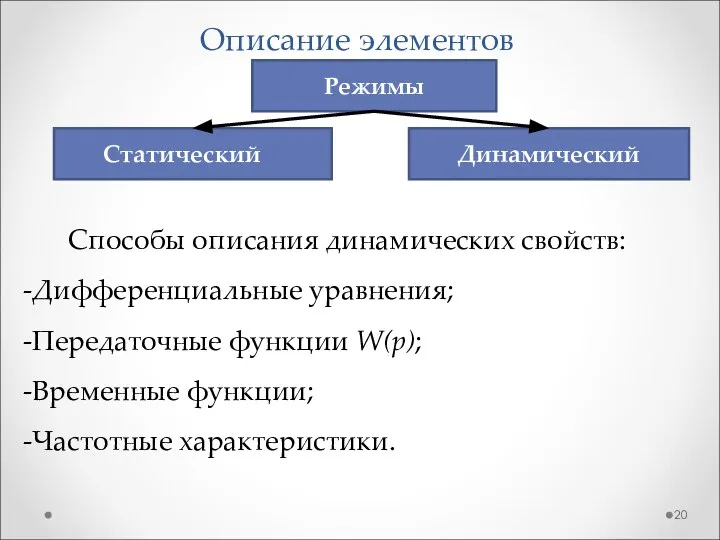
Описание элементов
Способы описания динамических свойств:
Дифференциальные уравнения;
Передаточные функции W(p);
Временные функции;
Частотные характеристики.
Режимы
Статический
Динамический
Описание элементов
Способы описания динамических свойств:
Дифференциальные уравнения;
Передаточные функции W(p);
Временные функции;
Частотные характеристики.
Режимы
Статический
Динамический
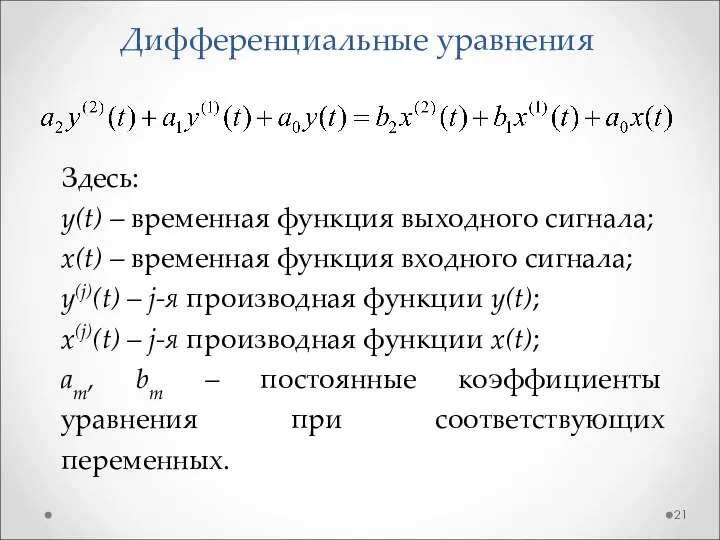
Дифференциальные уравнения
Здесь:
y(t) – временная функция выходного сигнала;
x(t) – временная функция входного
Дифференциальные уравнения
Здесь:
y(t) – временная функция выходного сигнала;
x(t) – временная функция входного
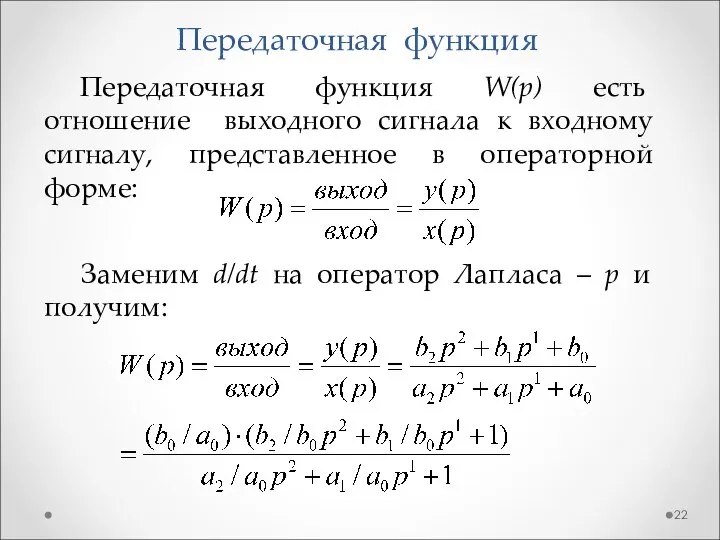
Передаточная функция
Передаточная функция W(p) есть отношение выходного сигнала к входному сигналу,
Передаточная функция
Передаточная функция W(p) есть отношение выходного сигнала к входному сигналу,
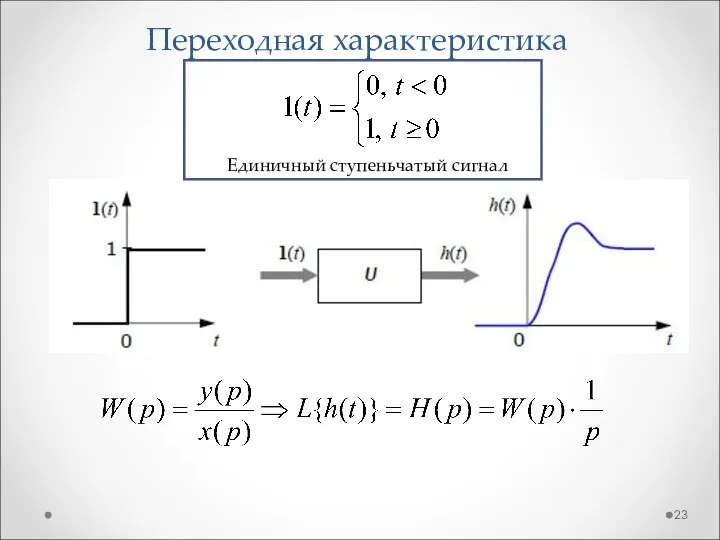
Переходная характеристика
Единичный ступеньчатый сигнал
Переходная характеристика
Единичный ступеньчатый сигнал
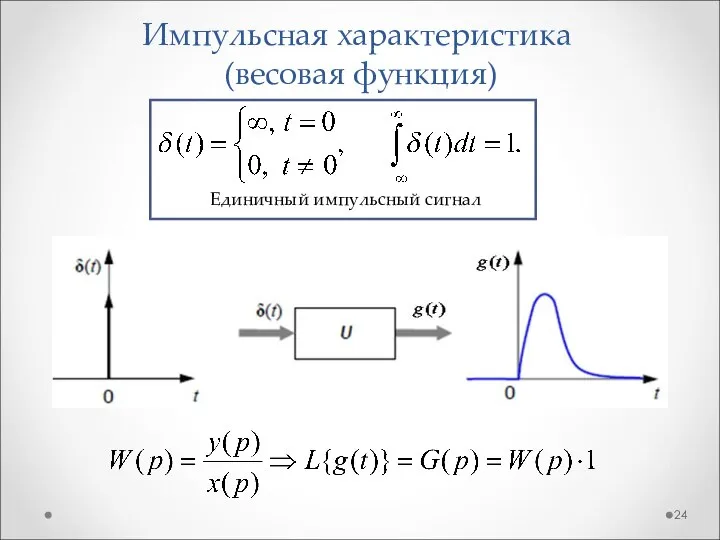
Импульсная характеристика
(весовая функция)
Единичный импульсный сигнал
Импульсная характеристика
(весовая функция)
Единичный импульсный сигнал
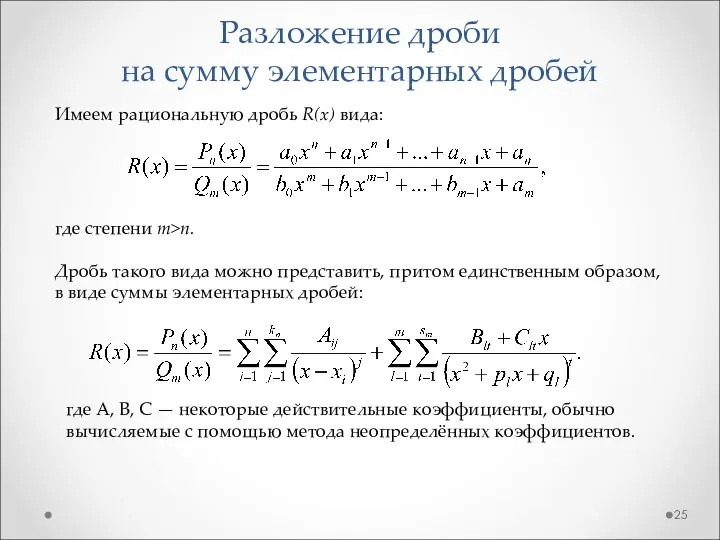
Разложение дроби
на сумму элементарных дробей
Имеем рациональную дробь R(x) вида:
где степени
Разложение дроби
на сумму элементарных дробей
Имеем рациональную дробь R(x) вида:
где степени
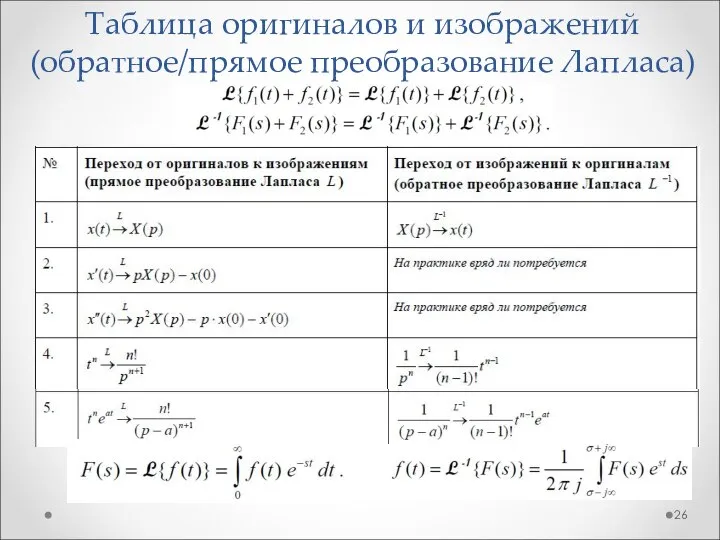
Таблица оригиналов и изображений (обратное/прямое преобразование Лапласа)
Таблица оригиналов и изображений (обратное/прямое преобразование Лапласа)
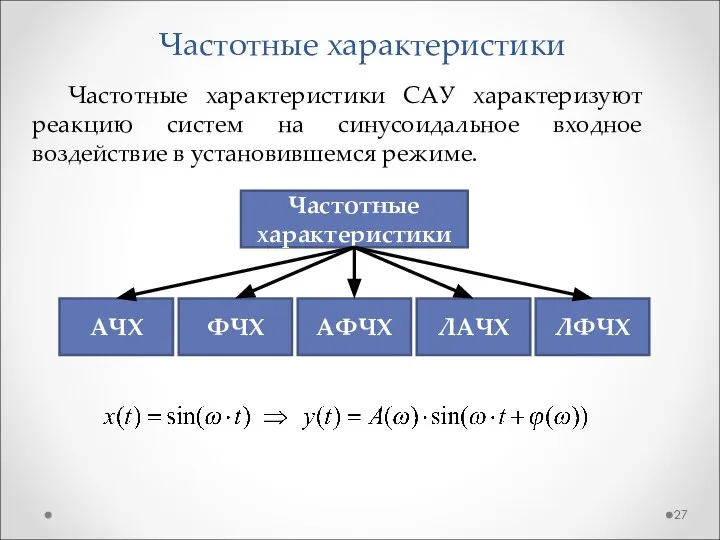
Частотные характеристики
Частотные характеристики САУ характеризуют реакцию систем на синусоидальное входное воздействие
Частотные характеристики
Частотные характеристики САУ характеризуют реакцию систем на синусоидальное входное воздействие
Частотные характеристики
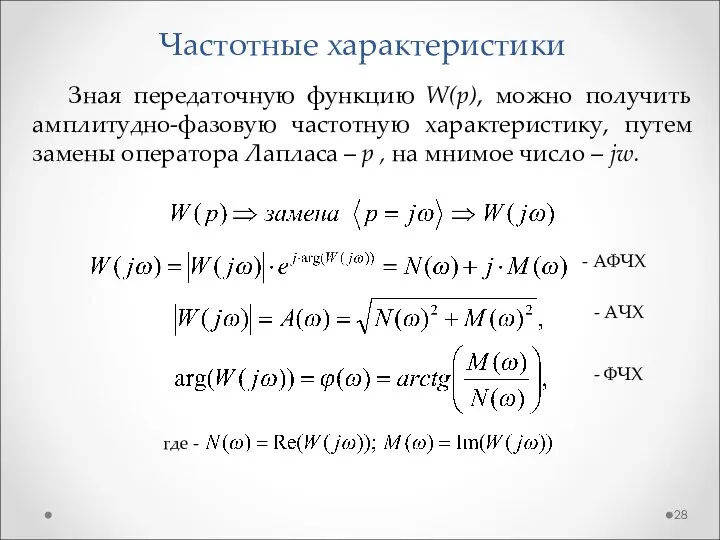
Зная передаточную функцию W(p), можно получить амплитудно-фазовую частотную характеристику, путем
Частотные характеристики
Зная передаточную функцию W(p), можно получить амплитудно-фазовую частотную характеристику, путем
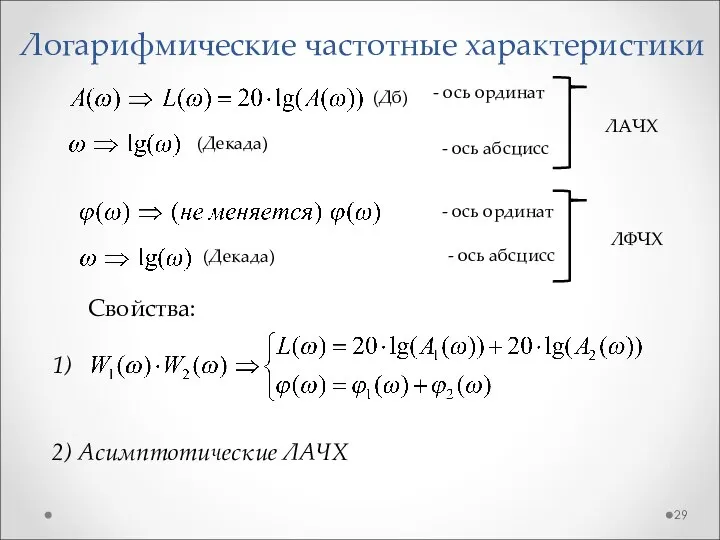
Логарифмические частотные характеристики
- ось ординат
- ось абсцисс
ЛАЧХ
- ось ординат
- ось абсцисс
ЛФЧХ
(Дб)
(Декада)
(Декада)
Свойства:
1)
2)
Логарифмические частотные характеристики
- ось ординат
- ось абсцисс
ЛАЧХ
- ось ординат
- ось абсцисс
ЛФЧХ
(Дб)
(Декада)
(Декада)
Свойства:
1)
2)
Типовые динамические звенья
Типовые динамические звенья
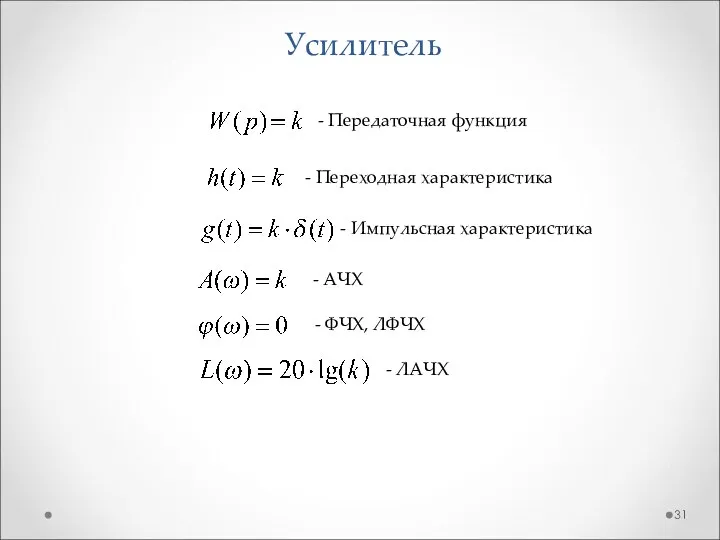
Усилитель
- Передаточная функция
- Переходная характеристика
- Импульсная характеристика
- АЧХ
- ФЧХ, ЛФЧХ
- ЛАЧХ
Усилитель
- Передаточная функция
- Переходная характеристика
- Импульсная характеристика
- АЧХ
- ФЧХ, ЛФЧХ
- ЛАЧХ
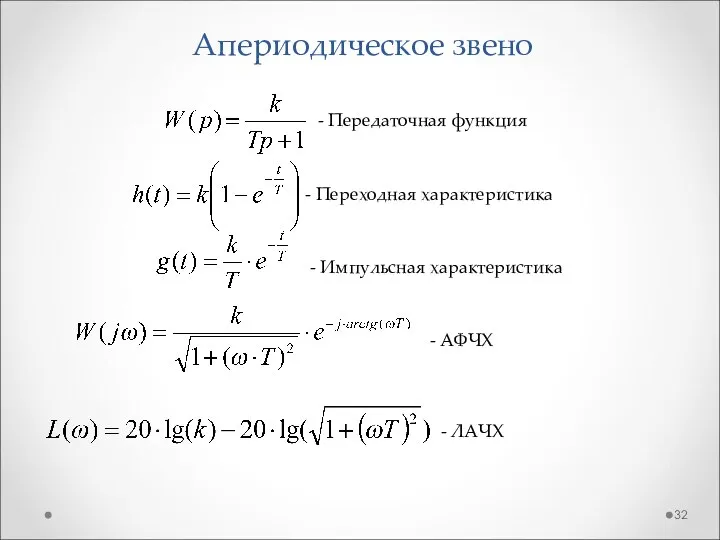
Апериодическое звено
- Передаточная функция
- Переходная характеристика
- Импульсная характеристика
- АФЧХ
- ЛАЧХ
Апериодическое звено
- Передаточная функция
- Переходная характеристика
- Импульсная характеристика
- АФЧХ
- ЛАЧХ
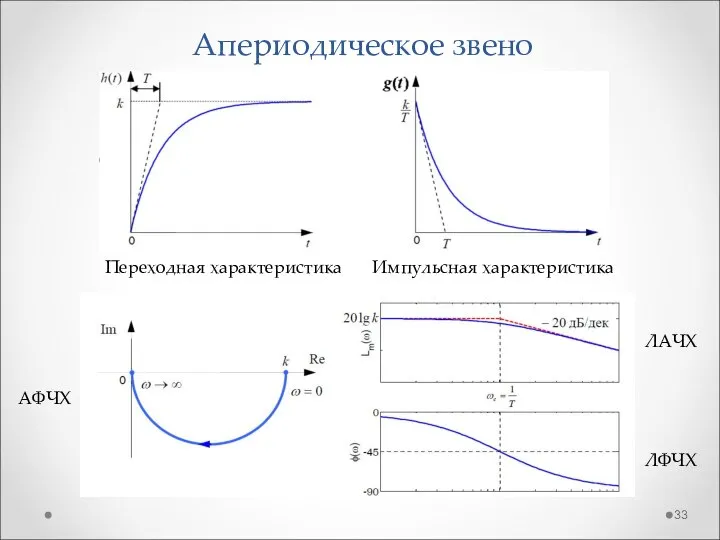
Апериодическое звено
Переходная характеристика
Импульсная характеристика
АФЧХ
ЛАЧХ
ЛФЧХ
Апериодическое звено
Переходная характеристика
Импульсная характеристика
АФЧХ
ЛАЧХ
ЛФЧХ
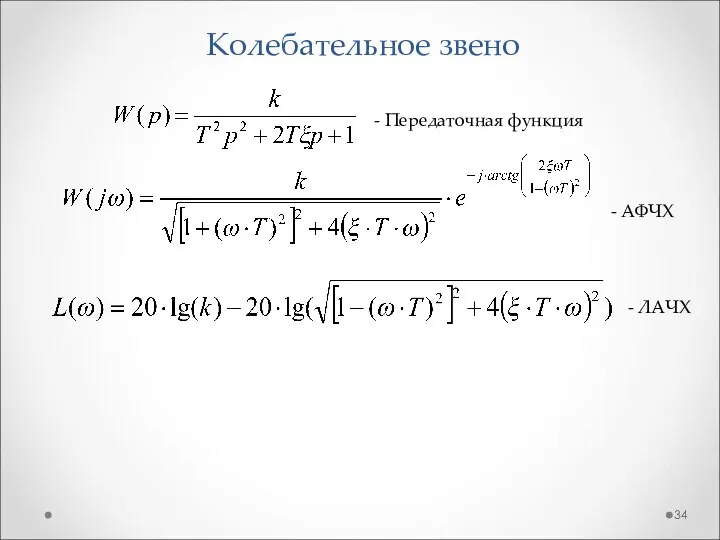
Колебательное звено
- Передаточная функция
- АФЧХ
- ЛАЧХ
Колебательное звено
- Передаточная функция
- АФЧХ
- ЛАЧХ
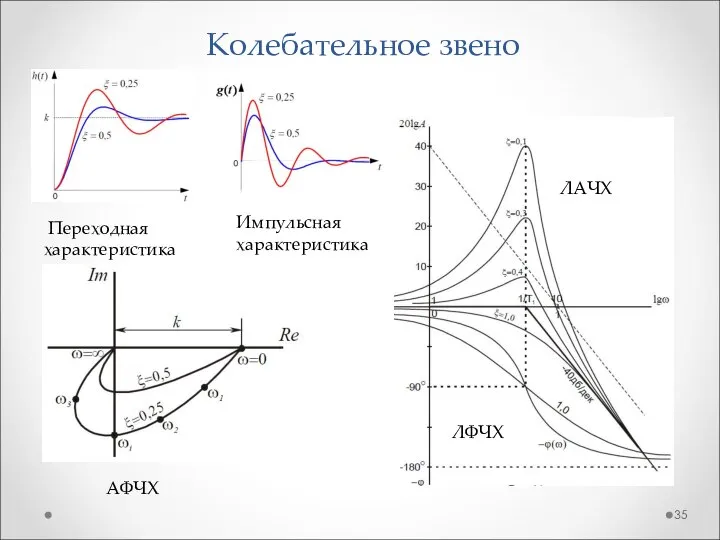
Колебательное звено
Переходная характеристика
Импульсная характеристика
АФЧХ
ЛАЧХ
ЛФЧХ
Колебательное звено
Переходная характеристика
Импульсная характеристика
АФЧХ
ЛАЧХ
ЛФЧХ
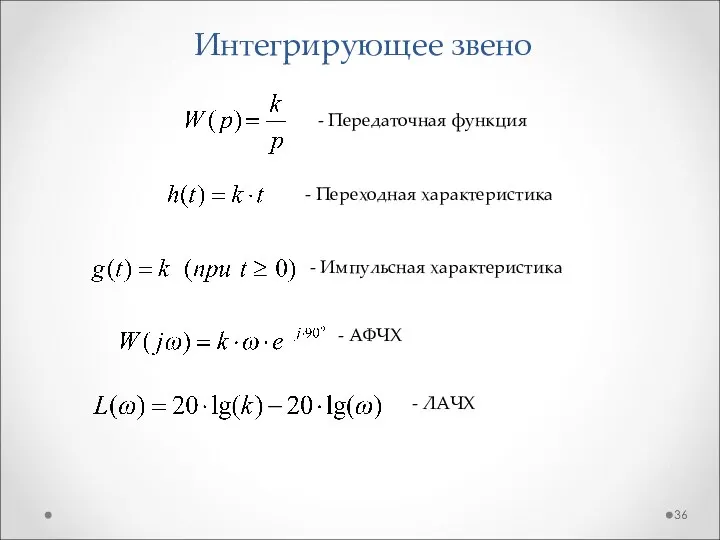
Интегрирующее звено
- Передаточная функция
- Переходная характеристика
- Импульсная характеристика
- АФЧХ
- ЛАЧХ
Интегрирующее звено
- Передаточная функция
- Переходная характеристика
- Импульсная характеристика
- АФЧХ
- ЛАЧХ
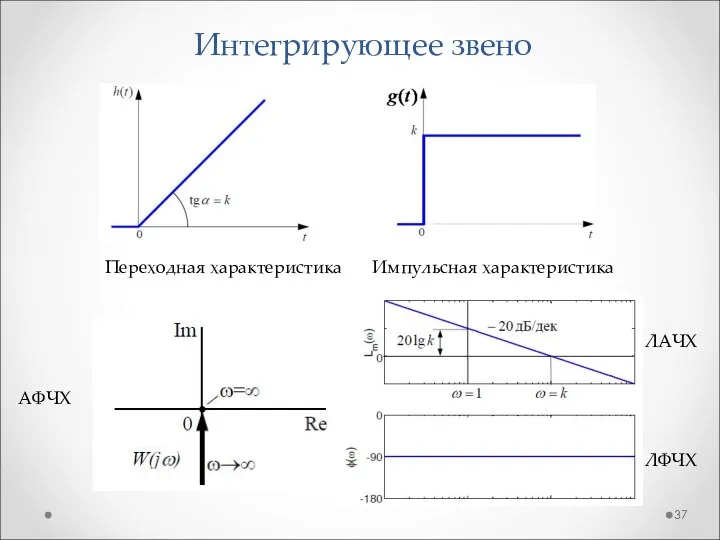
Интегрирующее звено
Переходная характеристика
Импульсная характеристика
АФЧХ
ЛАЧХ
ЛФЧХ
Интегрирующее звено
Переходная характеристика
Импульсная характеристика
АФЧХ
ЛАЧХ
ЛФЧХ
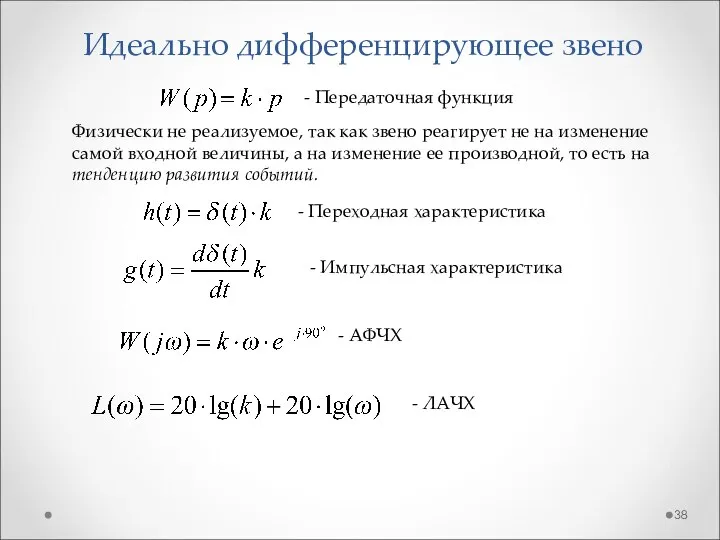
Идеально дифференцирующее звено
- Передаточная функция
- Переходная характеристика
- Импульсная характеристика
- АФЧХ
- ЛАЧХ
Физически
Идеально дифференцирующее звено
- Передаточная функция
- Переходная характеристика
- Импульсная характеристика
- АФЧХ
- ЛАЧХ
Физически
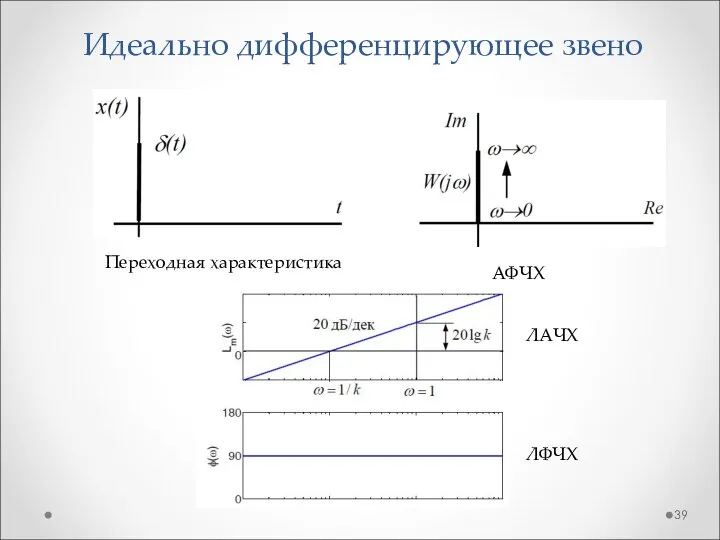
Идеально дифференцирующее звено
Переходная характеристика
АФЧХ
ЛАЧХ
ЛФЧХ
Идеально дифференцирующее звено
Переходная характеристика
АФЧХ
ЛАЧХ
ЛФЧХ
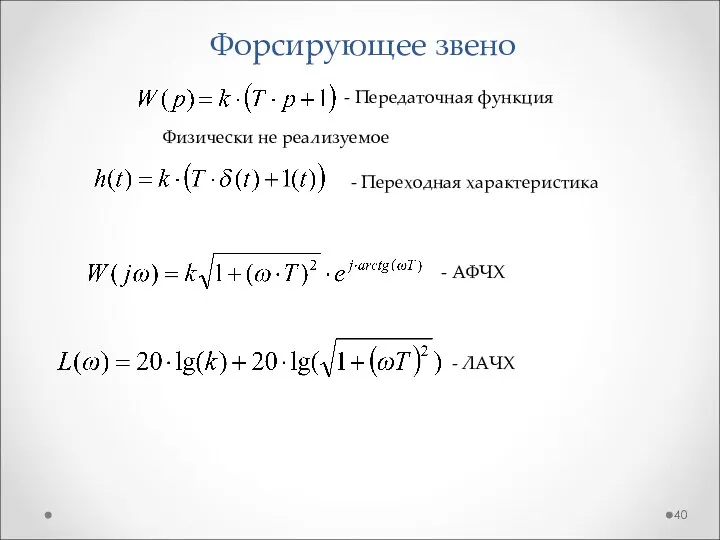
Форсирующее звено
- Передаточная функция
- Переходная характеристика
Физически не реализуемое
- АФЧХ
- ЛАЧХ
Форсирующее звено
- Передаточная функция
- Переходная характеристика
Физически не реализуемое
- АФЧХ
- ЛАЧХ
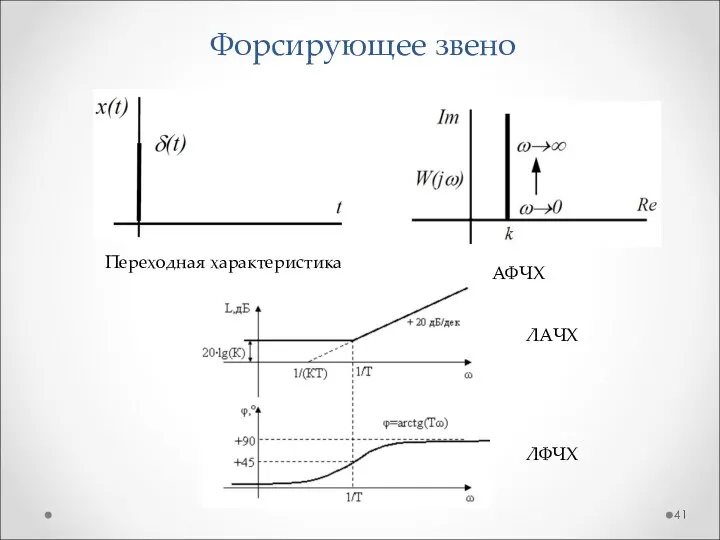
Форсирующее звено
Переходная характеристика
АФЧХ
ЛАЧХ
ЛФЧХ
Форсирующее звено
Переходная характеристика
АФЧХ
ЛАЧХ
ЛФЧХ
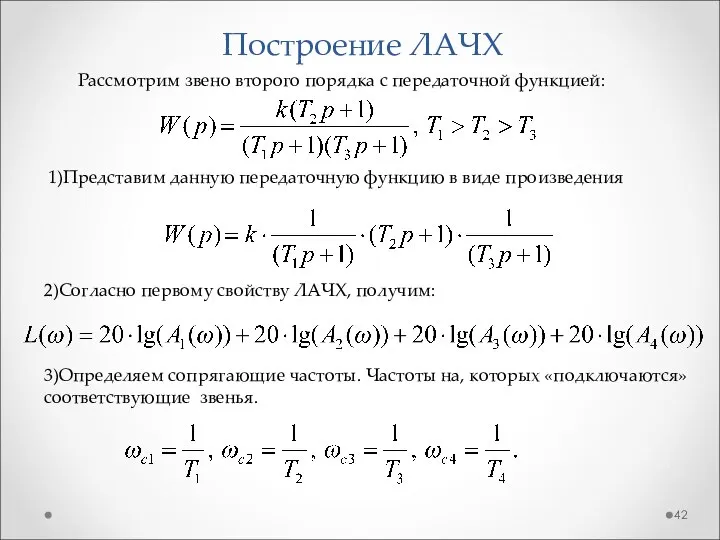
Построение ЛАЧХ
Рассмотрим звено второго порядка с передаточной функцией:
1)Представим данную передаточную
Построение ЛАЧХ
Рассмотрим звено второго порядка с передаточной функцией:
1)Представим данную передаточную

Структурные схемы
Структурные схемы
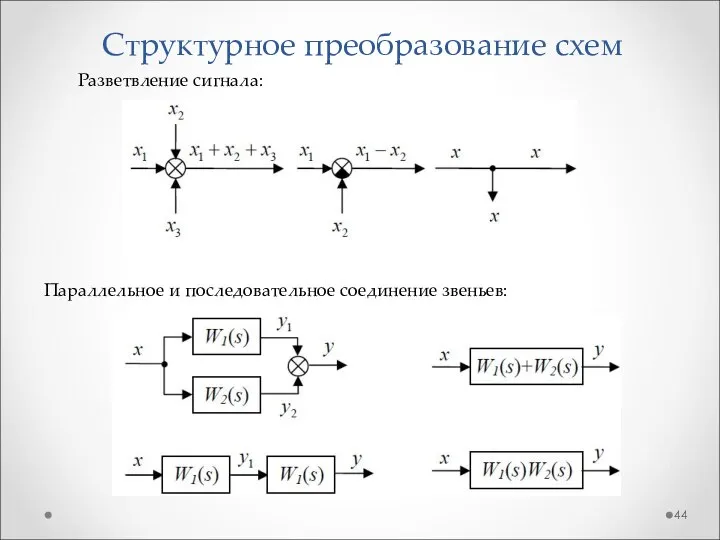
Структурное преобразование схем
Разветвление сигнала:
Параллельное и последовательное соединение звеньев:
Структурное преобразование схем
Разветвление сигнала:
Параллельное и последовательное соединение звеньев:
Структурное преобразование схем
Для контура с отрицательной обратной связью:
Если обратная связь
Структурное преобразование схем
Для контура с отрицательной обратной связью:
Если обратная связь
Структурное преобразование схем
Прямой перенос суммирующего звена:
Обратный перенос сигнала через ПФ:
Структурное преобразование схем
Прямой перенос суммирующего звена:
Обратный перенос сигнала через ПФ:
Структурное преобразование схем
Прямой перенос суммирующего звена:
Обратный перенос суммирующего звена:
Структурное преобразование схем
Прямой перенос суммирующего звена:
Обратный перенос суммирующего звена:
Передаточные функции систем
Передаточная функция по возмущающему воздействию:
Передаточная функция по управлению
Передаточная
Передаточные функции систем
Передаточная функция по возмущающему воздействию:
Передаточная функция по управлению
Передаточная
Анализ САУ
Анализ САУ

Анализ САУ
Требования к управлению
Точность
Качество
Устойчивость
Работоспособность
Анализ САУ
Требования к управлению
Точность
Качество
Устойчивость
Работоспособность
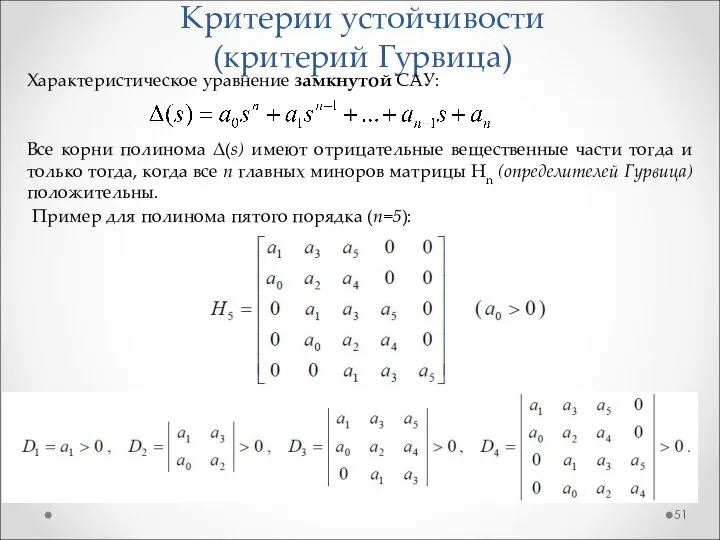
Критерии устойчивости
(критерий Гурвица)
Пример для полинома пятого порядка (n=5):
Все корни полинома Δ(s)
Критерии устойчивости
(критерий Гурвица)
Пример для полинома пятого порядка (n=5):
Все корни полинома Δ(s)
 Столкновения Абсолютно упругий удар
Столкновения Абсолютно упругий удар  Базовая электрика. Основы
Базовая электрика. Основы Тема 3: ВТОРОЙ ЗАКОН ТЕРМОДИНАМИКИ 3.1. ЭНЕРГИЯ И ЭНТРОПИЯ Второй закон устанавливает, что самопроизвольные процессы возможн
Тема 3: ВТОРОЙ ЗАКОН ТЕРМОДИНАМИКИ 3.1. ЭНЕРГИЯ И ЭНТРОПИЯ Второй закон устанавливает, что самопроизвольные процессы возможн Спектроскопия органических соединений
Спектроскопия органических соединений Соединение проводников
Соединение проводников Динамика судна. Общие понятия гидромеханики
Динамика судна. Общие понятия гидромеханики Прямолинейное и криволинейное движение. Движение тела по окружности
Прямолинейное и криволинейное движение. Движение тела по окружности Управління потоками реактивної енергії (вибір потужності компенсуючих установок та їх розміщення у системі електропостачання)
Управління потоками реактивної енергії (вибір потужності компенсуючих установок та їх розміщення у системі електропостачання) « МОУ Липковская Средняя Школа №3» Презентация на тему: « Диффузия» ПОДГОТОВИЛИ: НИКИТИНА НАДЕЖДА И ХАЛИМОВА ЕКАТЕРИНА
« МОУ Липковская Средняя Школа №3» Презентация на тему: « Диффузия» ПОДГОТОВИЛИ: НИКИТИНА НАДЕЖДА И ХАЛИМОВА ЕКАТЕРИНА Электр тізбектеріндегі өтпелі үрдістер
Электр тізбектеріндегі өтпелі үрдістер Законы постоянного тока
Законы постоянного тока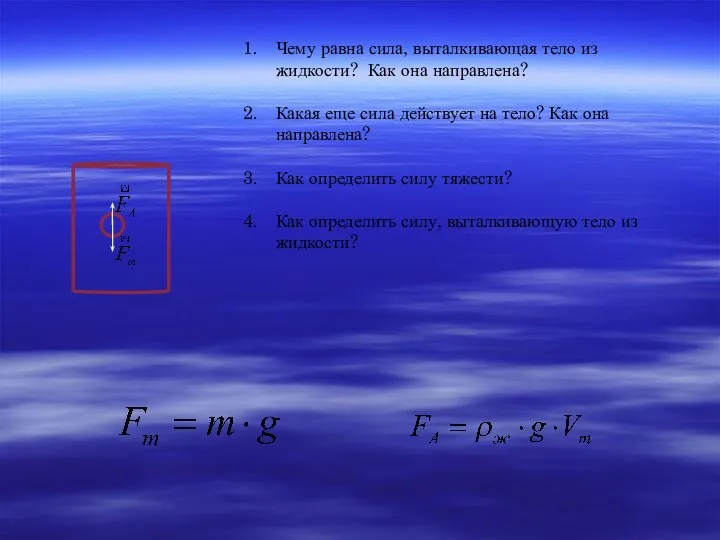 Плавление тел
Плавление тел Сила трения
Сила трения Лазер. Области применения лазеров
Лазер. Области применения лазеров Arduino. Электрическая схема
Arduino. Электрическая схема Задачи по физике
Задачи по физике харчування під час радіоактивної небезпеки Підготувала учениця 302 групи Авіакосмічного ліцею ім.І.Сікорського НАУ Гріднєва А
харчування під час радіоактивної небезпеки Підготувала учениця 302 групи Авіакосмічного ліцею ім.І.Сікорського НАУ Гріднєва А Методы травления материалов электронной техники
Методы травления материалов электронной техники Электрические цепи постоянного тока
Электрические цепи постоянного тока Энергетические ресурсы Мирового океана
Энергетические ресурсы Мирового океана Макс Планк Презентация по физике ученицы 12а класса Рижской Гризинькалнской средней шк. им. И. Г. Гердера Максимовой Татьяны
Макс Планк Презентация по физике ученицы 12а класса Рижской Гризинькалнской средней шк. им. И. Г. Гердера Максимовой Татьяны  Уравнение адиабатического процесса для идеального газа
Уравнение адиабатического процесса для идеального газа Закон Архимеда
Закон Архимеда Турбины ТЭС и АЭС. Теория теплового процесса. Основные уравнения теории
Турбины ТЭС и АЭС. Теория теплового процесса. Основные уравнения теории Вес тела
Вес тела Парообразование. Конденсация
Парообразование. Конденсация Презентация по физике "Физика-наука о природе" - скачать
Презентация по физике "Физика-наука о природе" - скачать  Презентация по физике на тему «Производство электроэнергии. Передача электроэнергии на расстоянии.» Ученицы 9 класса «В» Зениной
Презентация по физике на тему «Производство электроэнергии. Передача электроэнергии на расстоянии.» Ученицы 9 класса «В» Зениной