- Теория механизмов и машин. Лекция 4

Содержание
- 2. Тема 5 Основные понятия кинематики механизмов понятия: кинематический анализ, задачи и методы кинематического анализа и синтеза.
- 3. * лекция 4 Графический метод планов скоростей Кинематический анализ механизмов Используется для нахождения скоростей точек и
- 4. * лекция 4 Алгоритм построения плана скоростей Предполагается, что у нас есть структурная схема, выполнен структурный
- 5. * лекция 4 План скоростей строится от точки, которая называется полюсом – центром скоростей. Эта точка
- 6. * лекция 4 Если задана угловая скорость первого звена ω1, то скорость точки В определяется: –
- 7. * лекция 4 Из полюса РV проводим линию, перпендикулярную к АВ, которая изображает скорость в точке
- 8. * лекция 4 Алгоритм построения плана скоростей Определим скорость в точке С. Для этого запишем векторное
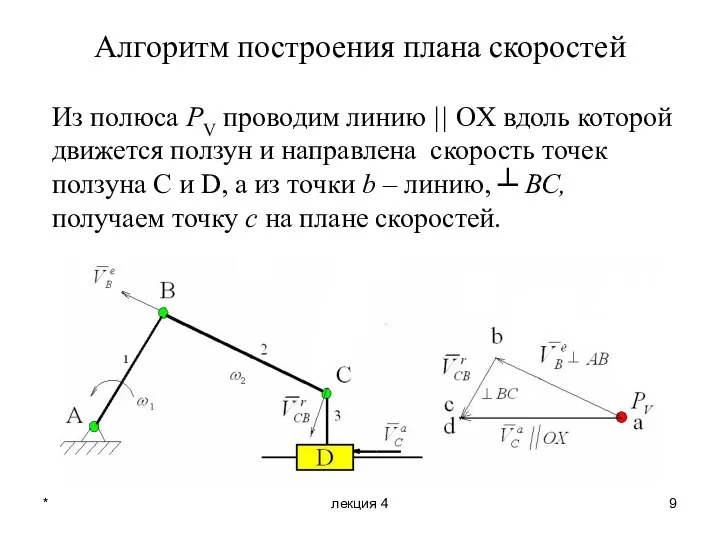
- 9. * лекция 4 Из полюса PV проводим линию || OX вдоль которой движется ползун и направлена
- 10. * лекция 4 Используя план скоростей, можно определить модуль скоростей: Подставим значение модуля относительной скорости в
- 11. * лекция 4 Алгоритм построения плана скоростей Усложним задачу, определив скорость точки F.
- 12. * лекция 4 Алгоритм построения плана скоростей
- 13. * лекция 4 Свойства плана скоростей: Векторы, выходящие из полюса PV (см. план скоростей), представляют собой
- 14. * лекция 4 Результаты расчета наносят на кинематическую диаграмму (в РГР 12 точек). Алгоритм построения плана
- 15. * лекция 4 ?
- 16. * лекция 4 Графический метод планов ускорений Кинематический анализ механизмов Используется для нахождения ускорений точек и
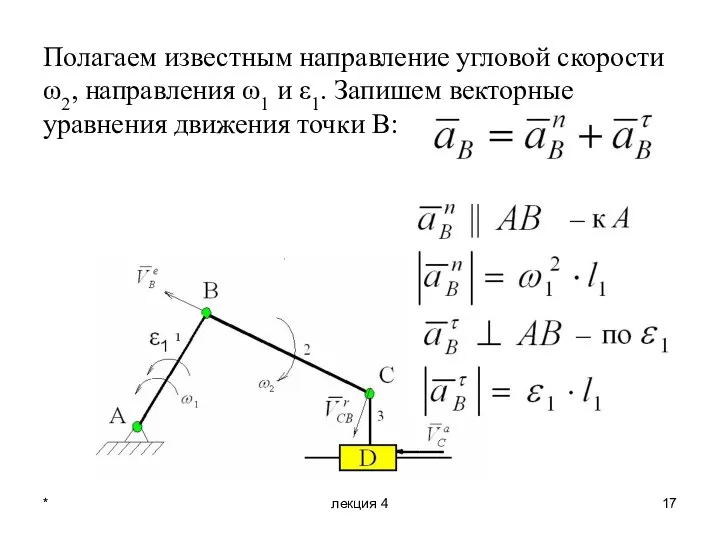
- 17. * лекция 4 Полагаем известным направление угловой скорости ω2, направления ω1 и ε1. Запишем векторные уравнения
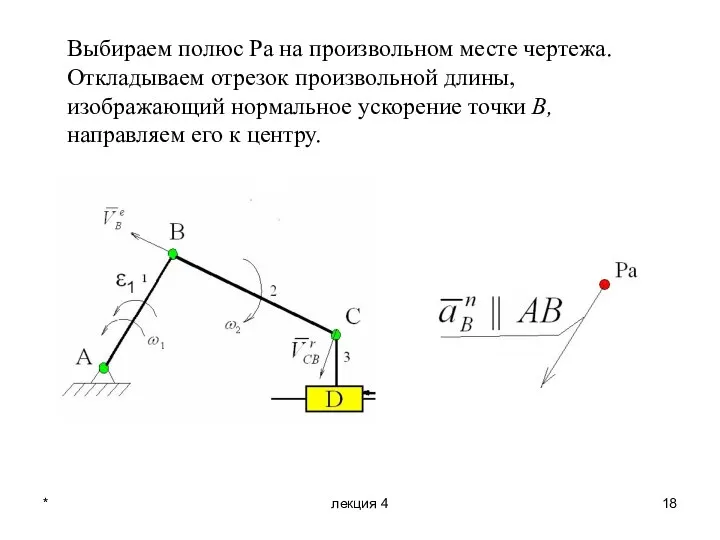
- 18. * лекция 4 Выбираем полюс Pа на произвольном месте чертежа. Откладываем отрезок произвольной длины, изображающий нормальное
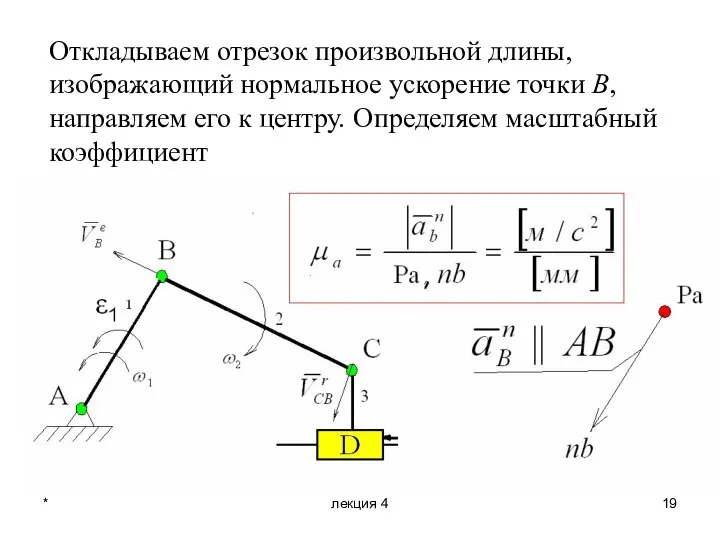
- 19. * лекция 4 Откладываем отрезок произвольной длины, изображающий нормальное ускорение точки В, направляем его к центру.
- 20. * лекция 4 Отрезком nb-b на плане ускорений изображается касательное ускорение – длина отрезка nb-b
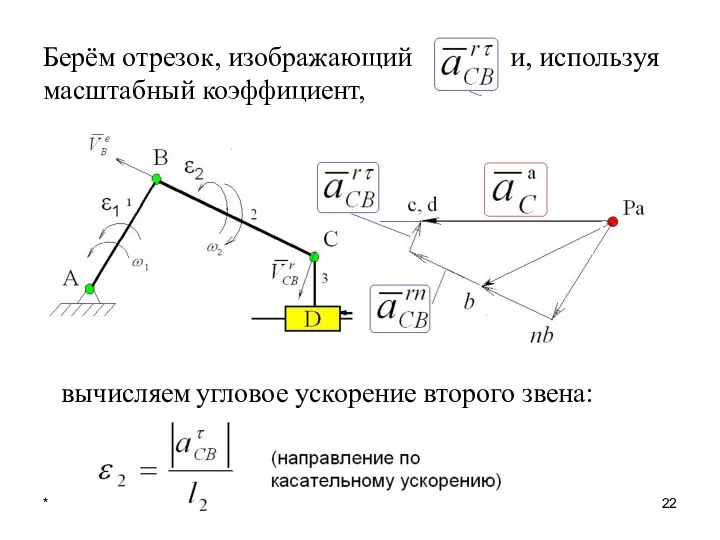
- 21. * лекция 4 Определим ускорение точки С, для этого запишем уравнение:
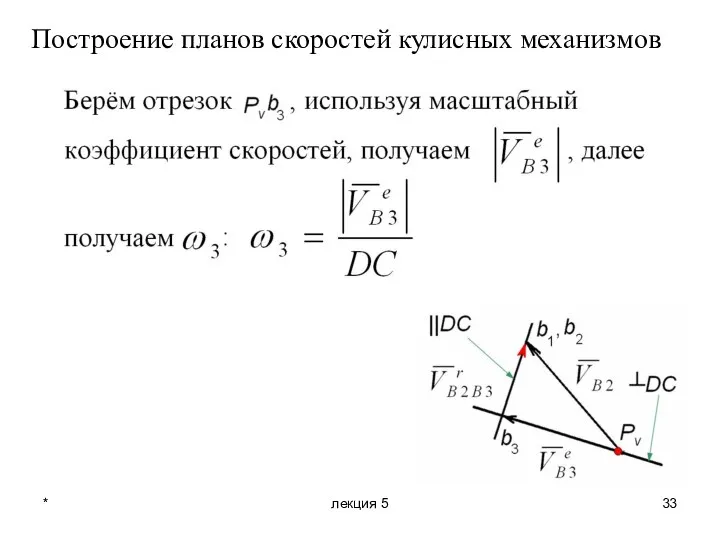
- 22. * лекция 4 Берём отрезок, изображающий и, используя масштабный коэффициент, вычисляем угловое ускорение второго звена:
- 23. * лекция 4 Результаты расчета наносят на кинематическую диаграмму (в РГР 2 точки).
- 24. * лекция 4 ?
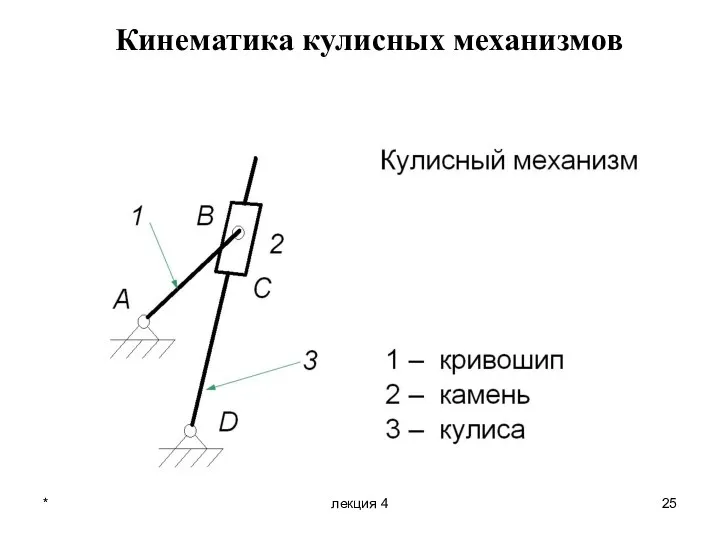
- 25. * лекция 4 Кинематика кулисных механизмов
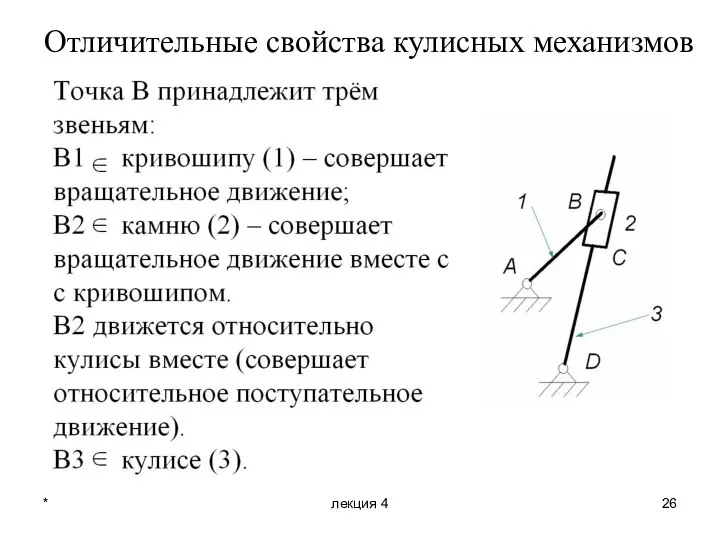
- 26. * лекция 4 Отличительные свойства кулисных механизмов
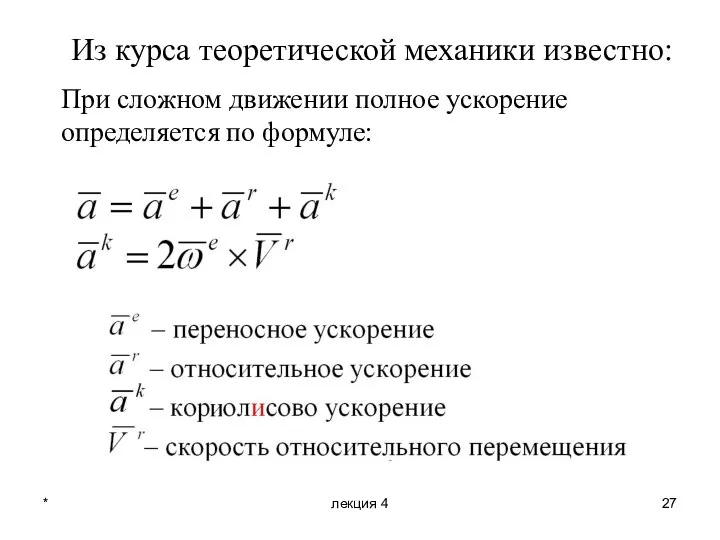
- 27. * лекция 4 Из курса теоретической механики известно: При сложном движении полное ускорение определяется по формуле:
- 28. * лекция 4 Из курса теоретической механики известно:
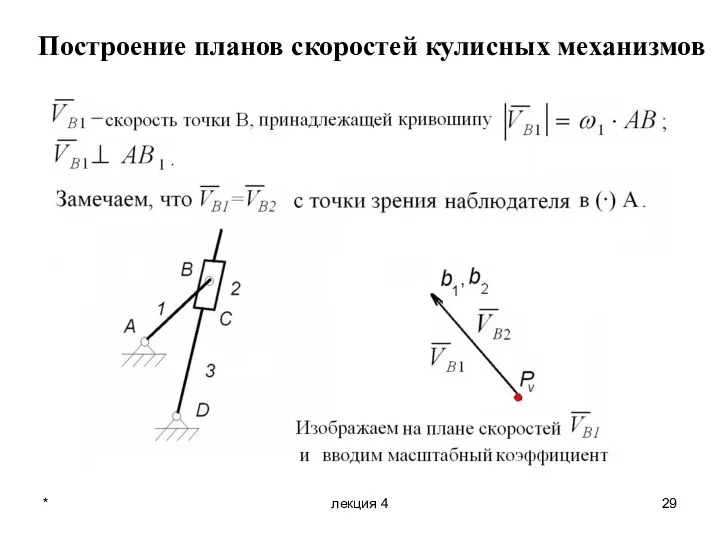
- 29. * лекция 4 Построение планов скоростей кулисных механизмов
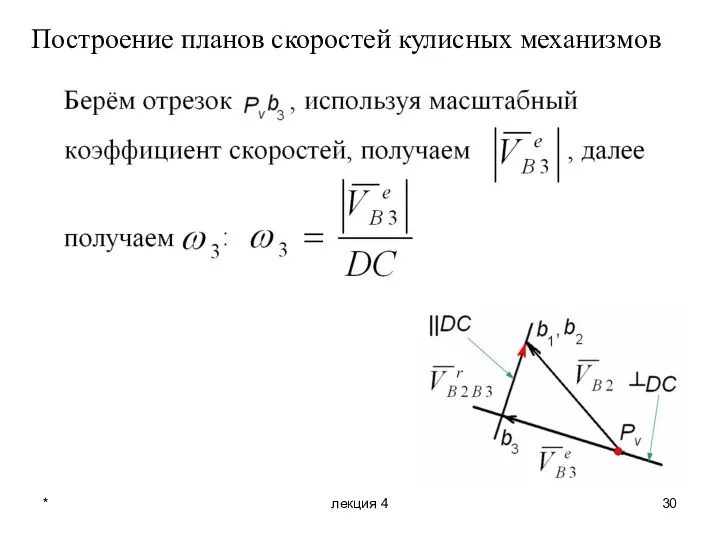
- 30. * лекция 4 Построение планов скоростей кулисных механизмов
- 31. * лекция 4 ?
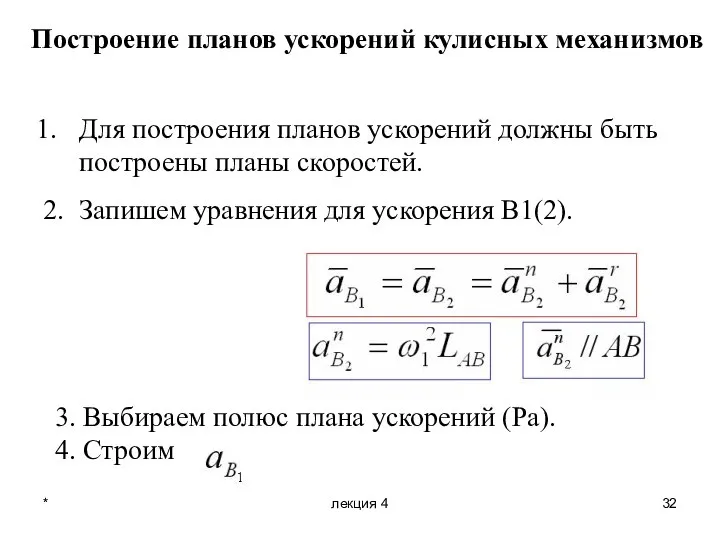
- 32. * лекция 4 Построение планов ускорений кулисных механизмов Для построения планов ускорений должны быть построены планы
- 33. * лекция 5 Построение планов скоростей кулисных механизмов
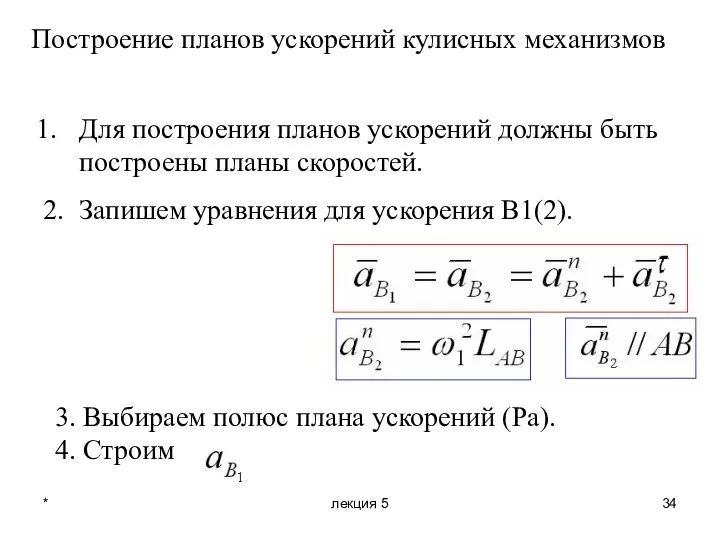
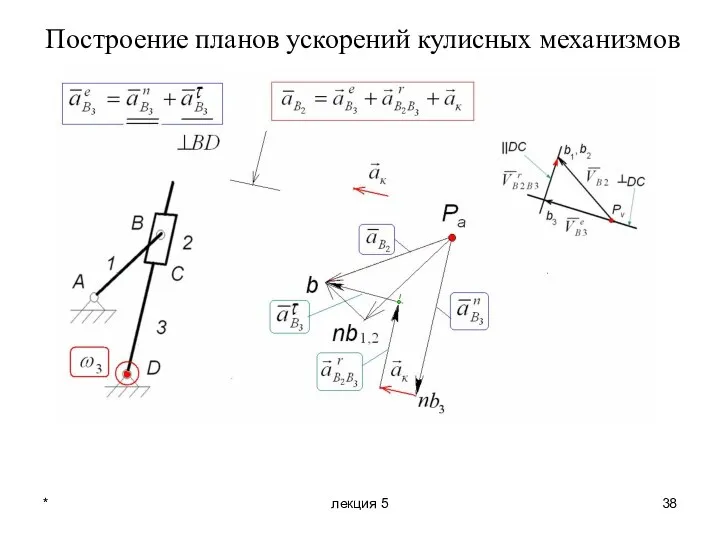
- 34. * лекция 5 Построение планов ускорений кулисных механизмов Для построения планов ускорений должны быть построены планы
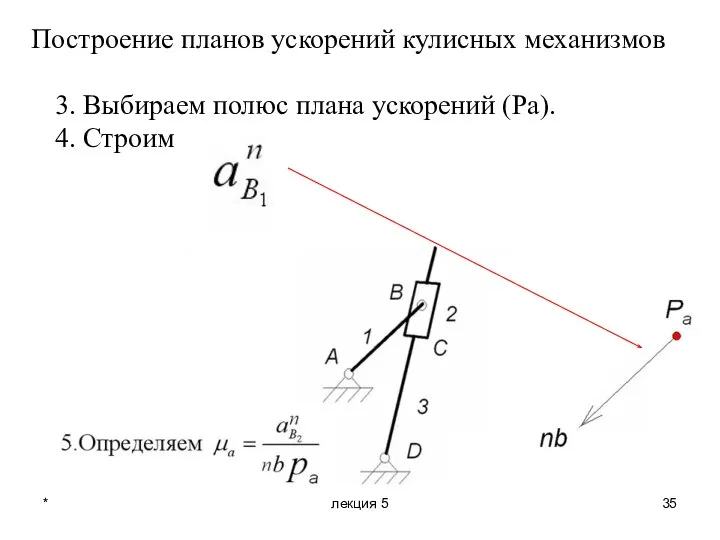
- 35. * лекция 5 3. Выбираем полюс плана ускорений (Ра). 4. Строим Построение планов ускорений кулисных механизмов
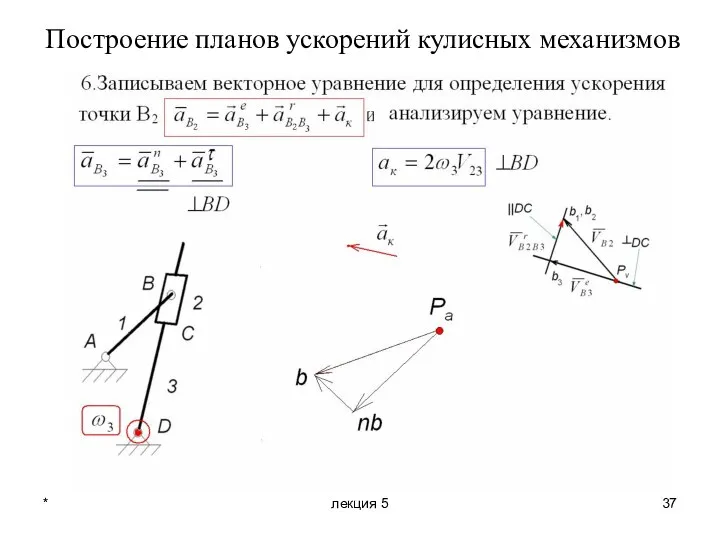
- 36. * лекция 5 Построение планов ускорений кулисных механизмов
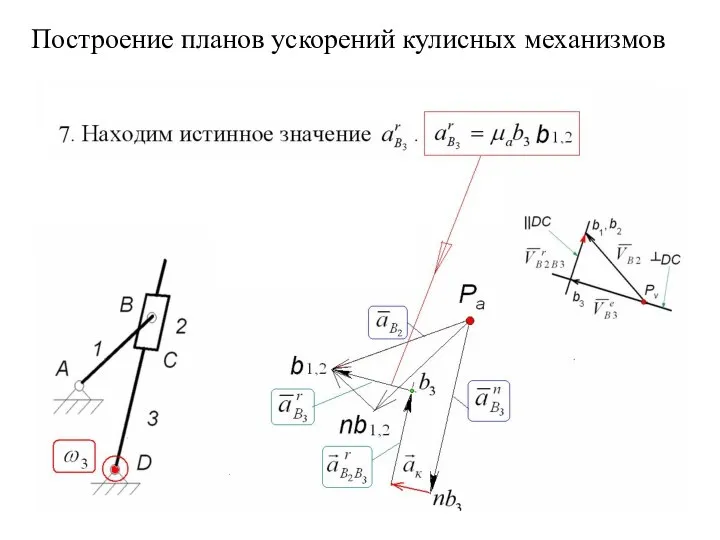
- 37. * лекция 5 Построение планов ускорений кулисных механизмов
- 38. * лекция 5 Построение планов ускорений кулисных механизмов
- 39. * лекция 4 Построение планов ускорений кулисных механизмов
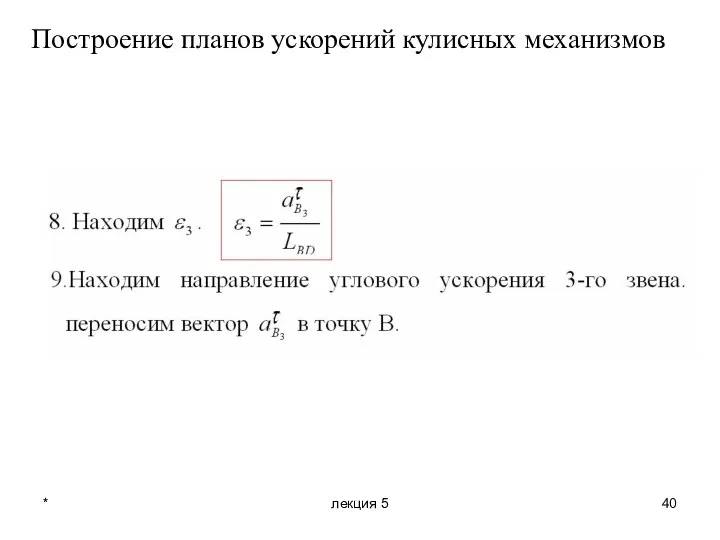
- 40. * лекция 5 Построение планов ускорений кулисных механизмов
- 42. Скачать презентацию
Тема 5
Основные понятия кинематики механизмов
понятия: кинематический анализ, задачи и методы кинематического
Тема 5
Основные понятия кинематики механизмов
понятия: кинематический анализ, задачи и методы кинематического

*
лекция 4
Графический метод планов скоростей
Кинематический анализ механизмов
Используется для нахождения скоростей точек
*
лекция 4
Графический метод планов скоростей
Кинематический анализ механизмов
Используется для нахождения скоростей точек
*
лекция 4
Алгоритм построения плана скоростей
Предполагается, что у нас есть структурная схема,
*
лекция 4
Алгоритм построения плана скоростей
Предполагается, что у нас есть структурная схема,
*
лекция 4
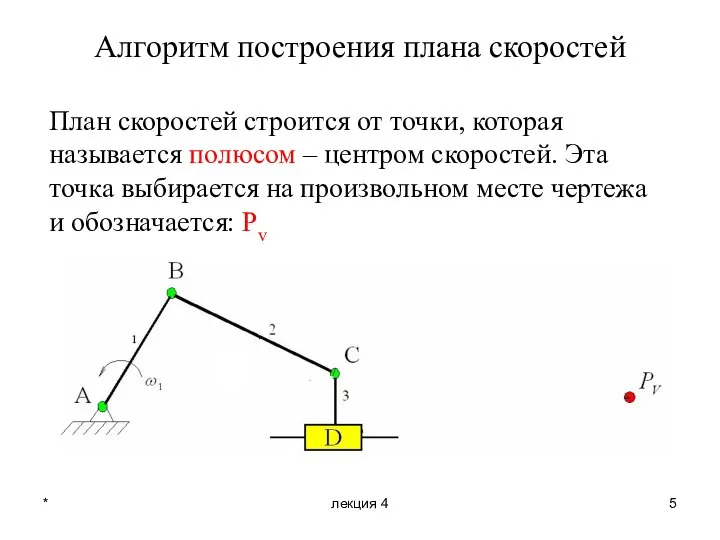
План скоростей строится от точки, которая называется полюсом – центром
*
лекция 4
План скоростей строится от точки, которая называется полюсом – центром

*
лекция 4
Если задана угловая скорость первого звена ω1, то скорость точки
*
лекция 4
Если задана угловая скорость первого звена ω1, то скорость точки
*
лекция 4
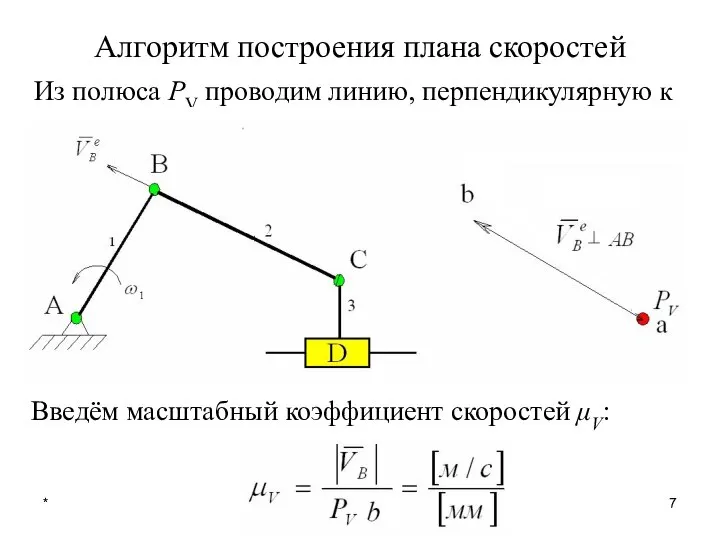
Из полюса РV проводим линию, перпендикулярную к АВ, которая изображает
*
лекция 4
Из полюса РV проводим линию, перпендикулярную к АВ, которая изображает

*
лекция 4
Алгоритм построения плана скоростей
Определим скорость в точке С. Для этого
*
лекция 4
Алгоритм построения плана скоростей
Определим скорость в точке С. Для этого
*
лекция 4
Из полюса PV проводим линию || OX вдоль которой движется
*
лекция 4
Из полюса PV проводим линию || OX вдоль которой движется

*
лекция 4
Используя план скоростей, можно определить модуль скоростей:
Подставим значение модуля относительной
*
лекция 4
Используя план скоростей, можно определить модуль скоростей:
Подставим значение модуля относительной

*
лекция 4
Алгоритм построения плана скоростей
Усложним задачу, определив скорость точки F.
*
лекция 4
Алгоритм построения плана скоростей
Усложним задачу, определив скорость точки F.

*
лекция 4
Алгоритм построения плана скоростей
*
лекция 4
Алгоритм построения плана скоростей

*
лекция 4
Свойства плана скоростей:
Векторы, выходящие из полюса PV (см. план скоростей),
*
лекция 4
Свойства плана скоростей:
Векторы, выходящие из полюса PV (см. план скоростей),

*
лекция 4
Результаты расчета наносят на кинематическую диаграмму (в РГР 12 точек).
*
лекция 4
Результаты расчета наносят на кинематическую диаграмму (в РГР 12 точек).

*
лекция 4
?
*
лекция 4
?
*
лекция 4
Графический метод планов ускорений
Кинематический анализ механизмов
Используется для нахождения ускорений точек
*
лекция 4
Графический метод планов ускорений
Кинематический анализ механизмов
Используется для нахождения ускорений точек
*
лекция 4
Полагаем известным направление угловой скорости ω2, направления ω1 и ε1.
*
лекция 4
Полагаем известным направление угловой скорости ω2, направления ω1 и ε1.
*
лекция 4
Выбираем полюс Pа на произвольном месте чертежа.
Откладываем отрезок произвольной
*
лекция 4
Выбираем полюс Pа на произвольном месте чертежа.
Откладываем отрезок произвольной
*
лекция 4
Откладываем отрезок произвольной длины, изображающий нормальное ускорение точки В, направляем
*
лекция 4
Откладываем отрезок произвольной длины, изображающий нормальное ускорение точки В, направляем

*
лекция 4
Отрезком nb-b на плане ускорений изображается касательное ускорение
– длина отрезка
*
лекция 4
Отрезком nb-b на плане ускорений изображается касательное ускорение
– длина отрезка

*
лекция 4
Определим ускорение точки С, для этого запишем уравнение:
*
лекция 4
Определим ускорение точки С, для этого запишем уравнение:
*
лекция 4
Берём отрезок, изображающий и, используя масштабный коэффициент,
вычисляем угловое ускорение второго
*
лекция 4
Берём отрезок, изображающий и, используя масштабный коэффициент,
вычисляем угловое ускорение второго

*
лекция 4
Результаты расчета наносят на кинематическую диаграмму (в РГР 2 точки).
*
лекция 4
Результаты расчета наносят на кинематическую диаграмму (в РГР 2 точки).

*
лекция 4
?
*
лекция 4
?
*
лекция 4
Кинематика кулисных механизмов
*
лекция 4
Кинематика кулисных механизмов
*
лекция 4
Отличительные свойства кулисных механизмов
*
лекция 4
Отличительные свойства кулисных механизмов
*
лекция 4
Из курса теоретической механики известно:
При сложном движении полное ускорение определяется
*
лекция 4
Из курса теоретической механики известно:
При сложном движении полное ускорение определяется

*
лекция 4
Из курса теоретической механики известно:
*
лекция 4
Из курса теоретической механики известно:
*
лекция 4
Построение планов скоростей кулисных механизмов
*
лекция 4
Построение планов скоростей кулисных механизмов
*
лекция 4
Построение планов скоростей кулисных механизмов
*
лекция 4
Построение планов скоростей кулисных механизмов

*
лекция 4
?
*
лекция 4
?
*
лекция 4
Построение планов ускорений кулисных механизмов
Для построения планов ускорений должны быть
*
лекция 4
Построение планов ускорений кулисных механизмов
Для построения планов ускорений должны быть
*
лекция 5
Построение планов скоростей кулисных механизмов
*
лекция 5
Построение планов скоростей кулисных механизмов
*
лекция 5
Построение планов ускорений кулисных механизмов
Для построения планов ускорений должны быть
*
лекция 5
Построение планов ускорений кулисных механизмов
Для построения планов ускорений должны быть
*
лекция 5
3. Выбираем полюс плана ускорений (Ра).
4. Строим
Построение планов ускорений
*
лекция 5
3. Выбираем полюс плана ускорений (Ра).
4. Строим
Построение планов ускорений

*
лекция 5
Построение планов ускорений кулисных механизмов
*
лекция 5
Построение планов ускорений кулисных механизмов
*
лекция 5
Построение планов ускорений кулисных механизмов
*
лекция 5
Построение планов ускорений кулисных механизмов
*
лекция 5
Построение планов ускорений кулисных механизмов
*
лекция 5
Построение планов ускорений кулисных механизмов
*
лекция 4
Построение планов ускорений кулисных механизмов
*
лекция 4
Построение планов ускорений кулисных механизмов
*
лекция 5
Построение планов ускорений кулисных механизмов
*
лекция 5
Построение планов ускорений кулисных механизмов
 Электростатическое поле в веществе
Электростатическое поле в веществе Презентация по физике Давление. Единицы давления
Презентация по физике Давление. Единицы давления Ожэ-электронная спектроскопия
Ожэ-электронная спектроскопия Титрование с применением флюоресцентных индикаторов
Титрование с применением флюоресцентных индикаторов Теоретичские основы теплотехники
Теоретичские основы теплотехники Динамика вращательного движения. (Лекция 5)
Динамика вращательного движения. (Лекция 5) Квантовая и ядерная физика. Раздел Молекулярные спектры
Квантовая и ядерная физика. Раздел Молекулярные спектры Термодинамика. Работа в термодинамике
Термодинамика. Работа в термодинамике Урок № 41. Задачи
Урок № 41. Задачи Презентация Изопроцессы в газах 10 класс
Презентация Изопроцессы в газах 10 класс  Опыты Герца Физика 11 класс
Опыты Герца Физика 11 класс  Равноускоренное прямолинейное движение
Равноускоренное прямолинейное движение Презентация на тему Трансформатор. Передача электрической энергии на расстояние.
Презентация на тему Трансформатор. Передача электрической энергии на расстояние. Поляризация света
Поляризация света Arduino. Электрическая схема
Arduino. Электрическая схема Микроосновы взаимозаменяемости деталей
Микроосновы взаимозаменяемости деталей Давление. Единицы давления. Способы уменьшения и увеличения давления Методическая разработка Васенина Н.Д. учителя физики
Давление. Единицы давления. Способы уменьшения и увеличения давления Методическая разработка Васенина Н.Д. учителя физики  Сравнение энергоисточников
Сравнение энергоисточников Температуралық тепе-теңдік күйіндегі денелердің сәуле шығаруы. Қара дененің сәуле шығару заңдары. (Лекция 14)
Температуралық тепе-теңдік күйіндегі денелердің сәуле шығаруы. Қара дененің сәуле шығару заңдары. (Лекция 14) Аттестационная работа. Физика. Домашняя лаборатория. 7 класс
Аттестационная работа. Физика. Домашняя лаборатория. 7 класс Явление электромагнитной индукции. Магнитный поток. Закон электромагнитной индукции
Явление электромагнитной индукции. Магнитный поток. Закон электромагнитной индукции Презентация ШКАЛА ЭЛЕКТРОМАГНИТНЫХ ИЗЛУЧЕНИЙ
Презентация ШКАЛА ЭЛЕКТРОМАГНИТНЫХ ИЗЛУЧЕНИЙ  Метод поиска решений творческих задач. Метод фокальных объектов
Метод поиска решений творческих задач. Метод фокальных объектов Терагерцевое излучение
Терагерцевое излучение Основные характеристики линий передачи
Основные характеристики линий передачи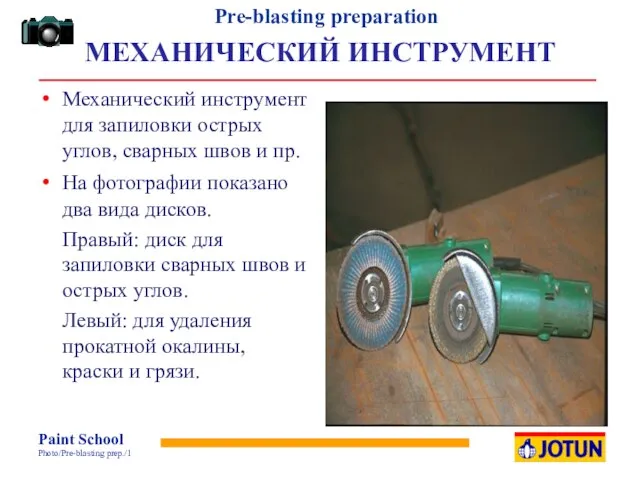 Механический инструмент для запиловки острых углов, сварных швов
Механический инструмент для запиловки острых углов, сварных швов Уравнение Бернулли Подъемная сила крыла
Уравнение Бернулли Подъемная сила крыла  Викторина по физике Выполнила : Морозова Л. В-учитель физики школы №18, г. Кемерово
Викторина по физике Выполнила : Морозова Л. В-учитель физики школы №18, г. Кемерово