- Типовые динамические звенья систем управления

Содержание
- 2. П Л А Н Л Е К Ц И И: 1. Характеристика и классификация звеньев САУ.
- 3. 3. ТОЖДЕСТВЕННЫЕ ПРЕОБРАЗОВАНИЯ СТРУКТУРНЫХ СХЕМ . ТИПОВЫЕ СОЕДИНЕНИЯ (последовательное, параллельное, параллельное-встречное). 4. ПОНЯТИЕ УСТОЙЧИВОСТИ. КРИТЕРИИ УСТОЙЧИВОСТИ.
- 4. Звеном СУ называется ее элемент, обладающий определенными свойствами в динамическом отношении. Звенья регулирования могут иметь разную
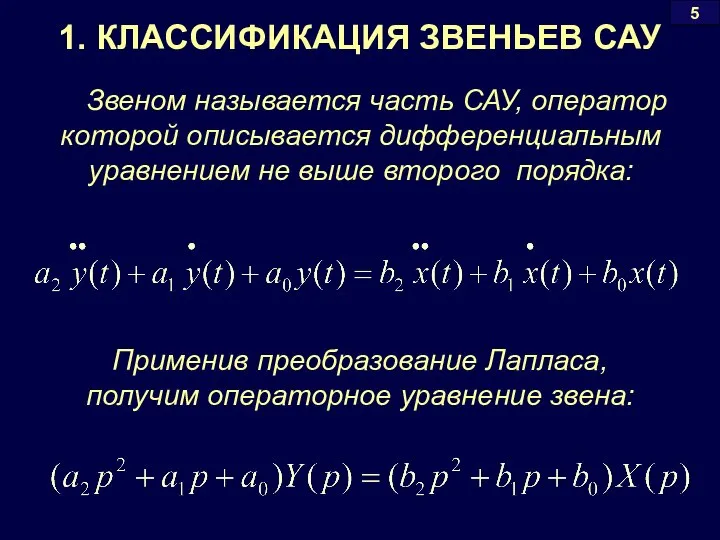
- 5. 1. КЛАССИФИКАЦИЯ ЗВЕНЬЕВ САУ Звеном называется часть САУ, оператор которой описывается дифференциальным уравнением не выше второго
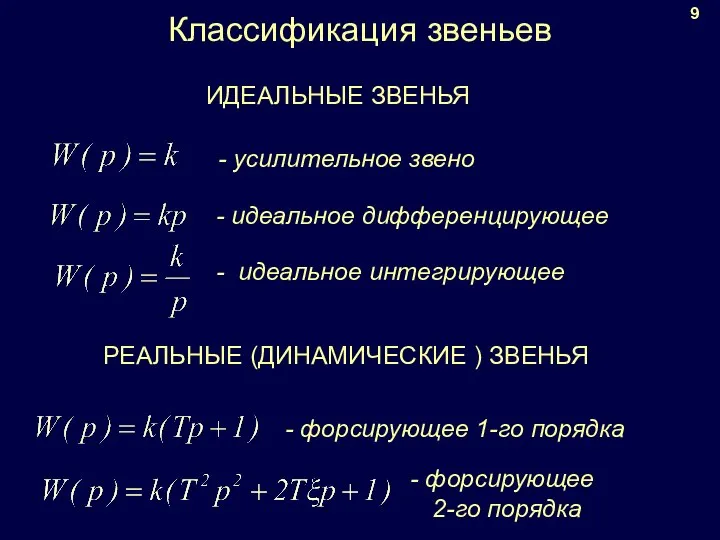
- 6. Классификация звеньев 9 - идеальное интегрирующее - усилительное звено - идеальное дифференцирующее ИДЕАЛЬНЫЕ ЗВЕНЬЯ РЕАЛЬНЫЕ (ДИНАМИЧЕСКИЕ
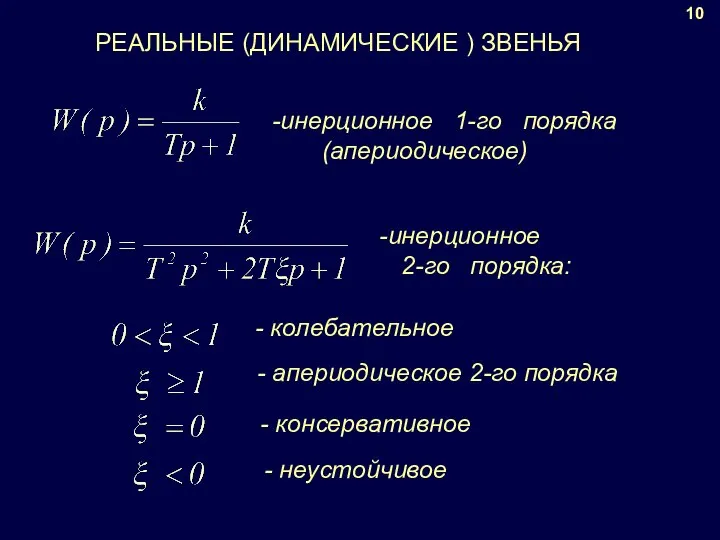
- 7. 10 РЕАЛЬНЫЕ (ДИНАМИЧЕСКИЕ ) ЗВЕНЬЯ инерционное 1-го порядка (апериодическое) инерционное 2-го порядка: колебательное апериодическое 2-го порядка
- 8. 2. ВРЕМЕННЫЕ ХАРАКТЕРИСТИКИ ЗВЕНЬЕВ САУ 11 2.1. Усилительное звено 1. Передаточная функция: 2. Операторное уравнение: 3.
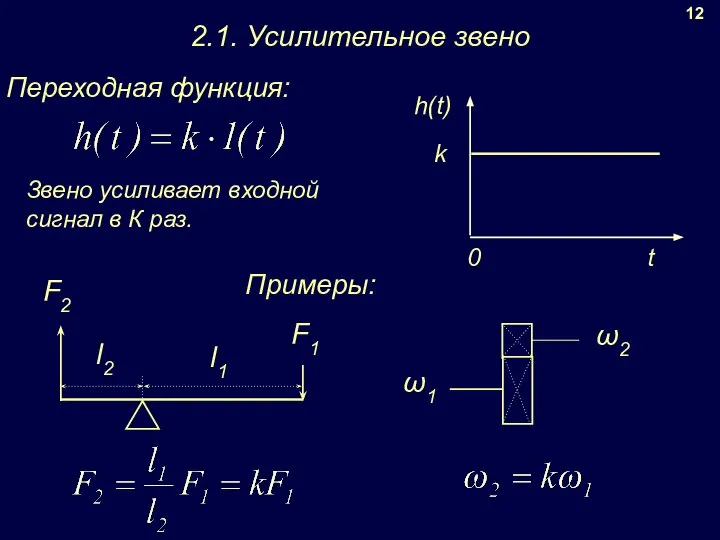
- 9. 12 2.1. Усилительное звено Примеры:
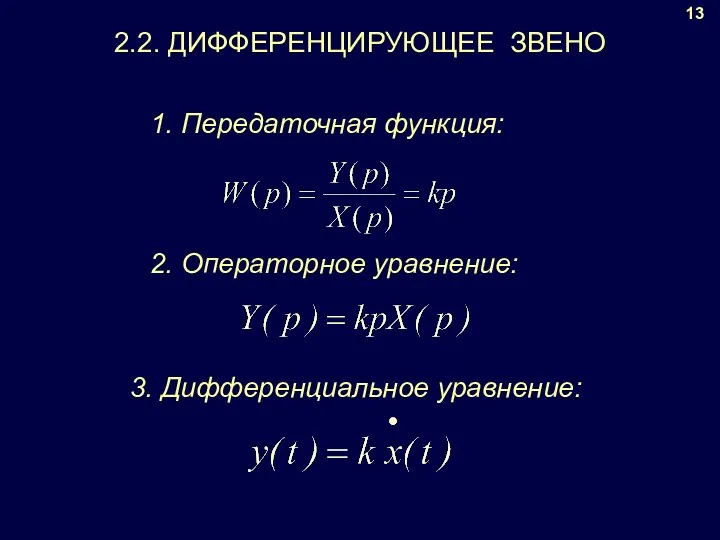
- 10. 13 1. Передаточная функция: 2. Операторное уравнение: 3. Дифференциальное уравнение: 2.2. ДИФФЕРЕНЦИРУЮЩЕЕ ЗВЕНО
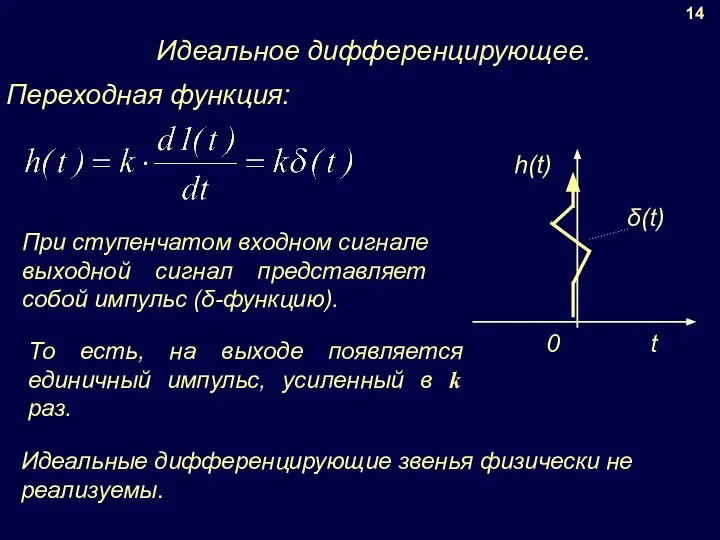
- 11. 14 Идеальное дифференцирующее. При ступенчатом входном сигнале выходной сигнал представляет собой импульс (δ-функцию). Идеальные дифференцирующие звенья
- 12. Большинство объектов, которые представляют собой дифференцирующие звенья, относятся к реальным дифференцирующим звеньям. 15
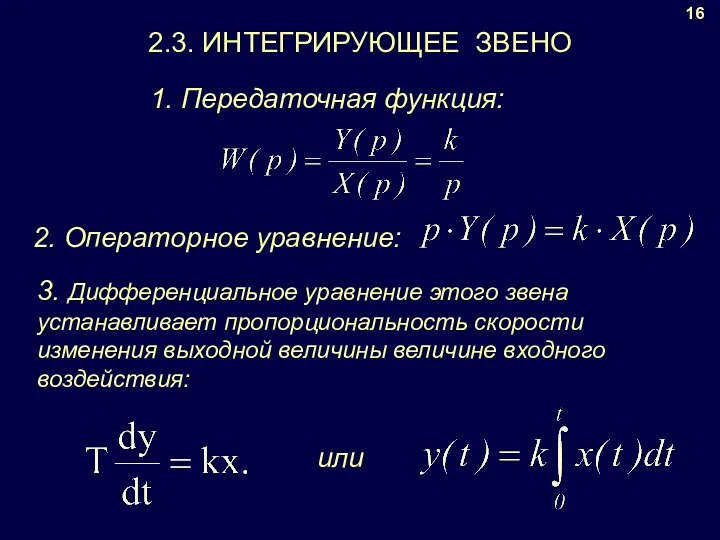
- 13. 16 1. Передаточная функция: 2. Операторное уравнение: 3. Дифференциальное уравнение этого звена устанавливает пропорциональность скорости изменения
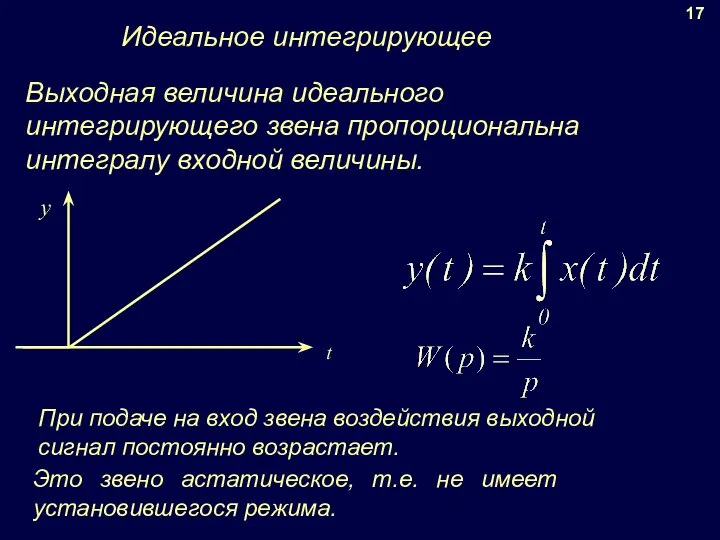
- 14. Идеальное интегрирующее Выходная величина идеального интегрирующего звена пропорциональна интегралу входной величины. При подаче на вход звена
- 15. Реальное интегрирующее. Примером интегрирующего звена является двигатель постоянного тока с независимым возбуждением, если в качестве входного
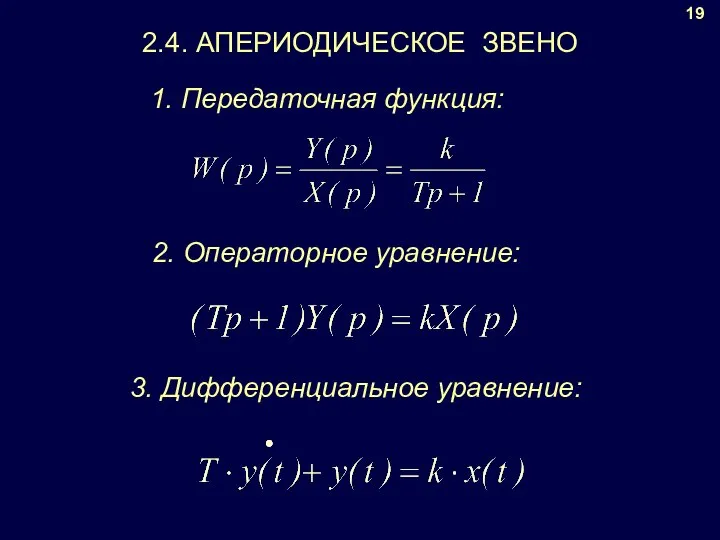
- 16. 19 1. Передаточная функция: 2. Операторное уравнение: 3. Дифференциальное уравнение: 2.4. АПЕРИОДИЧЕСКОЕ ЗВЕНО
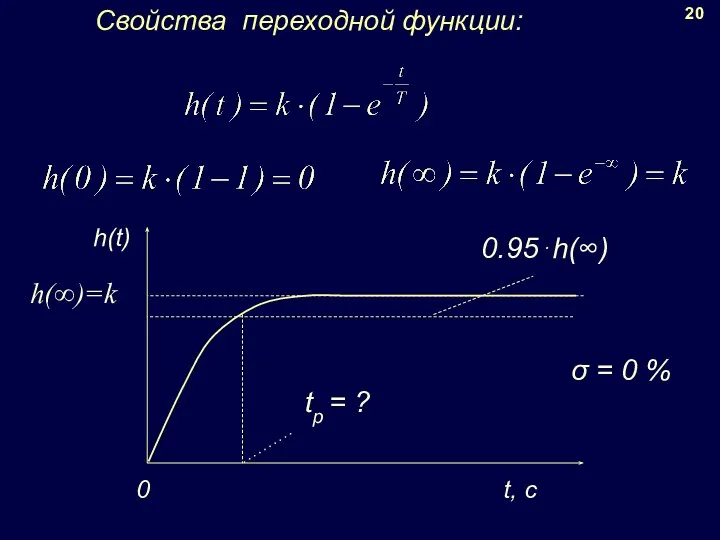
- 17. 20 Свойства переходной функции: h(∞)=k σ = 0 %
- 18. Определение времени регулирования: 21
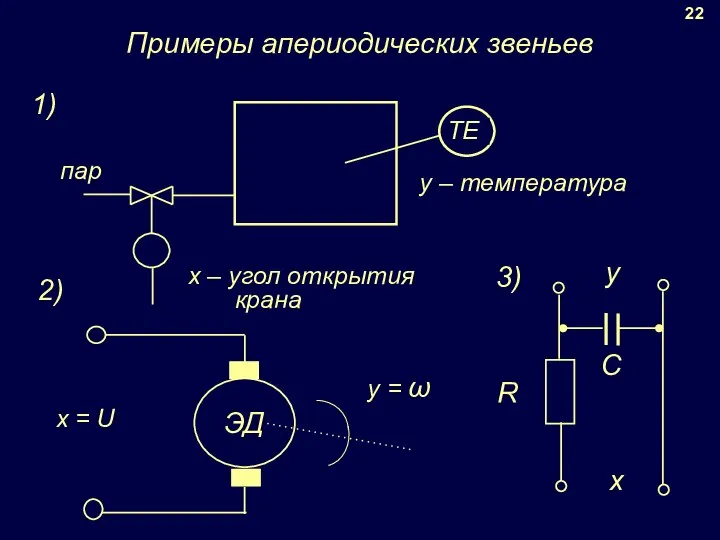
- 19. 22 Примеры апериодических звеньев x – угол открытия крана y – температура x = U 1)
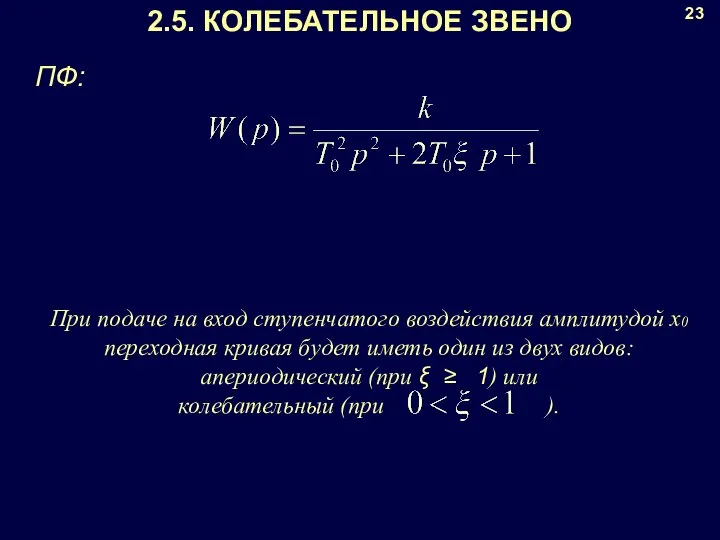
- 20. 23 2.5. КОЛЕБАТЕЛЬНОЕ ЗВЕНО ПФ: При подаче на вход ступенчатого воздействия амплитудой х0 переходная кривая будет
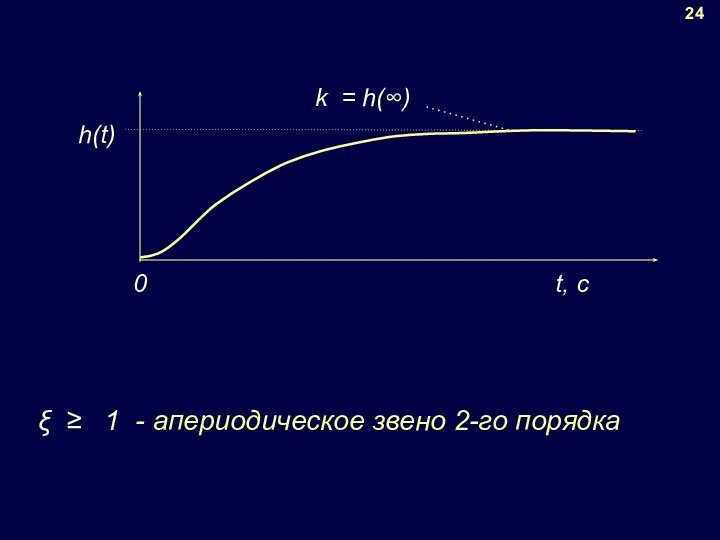
- 21. 24 ξ ≥ 1 - апериодическое звено 2-го порядка
- 22. k = h(∞) hmax1 25
- 23. Зависимость переходной функции от ξ 26
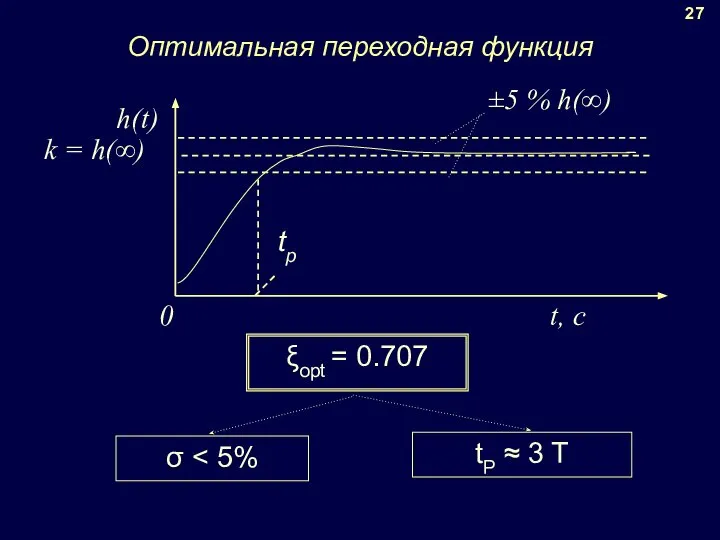
- 24. 27 Оптимальная переходная функция ξopt = 0.707 tР ≈ 3 T σ
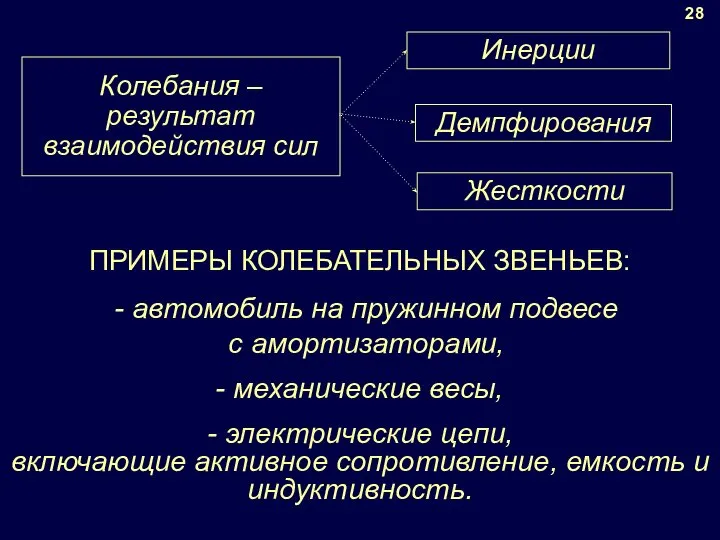
- 25. 28 ПРИМЕРЫ КОЛЕБАТЕЛЬНЫХ ЗВЕНЬЕВ: Колебания – результат взаимодействия сил - электрические цепи, включающие активное сопротивление, емкость
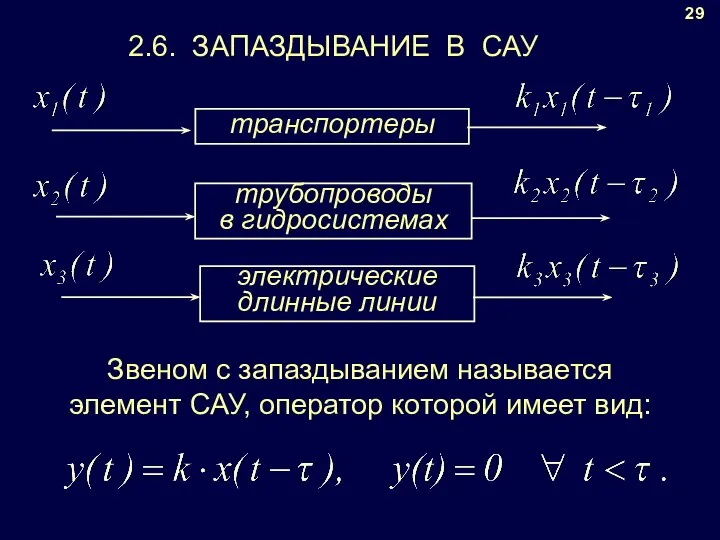
- 26. 2.6. ЗАПАЗДЫВАНИЕ В САУ 29 Звеном с запаздыванием называется элемент САУ, оператор которой имеет вид:
- 27. Переходная функция звена с запаздыванием 30 τ Передаточная функция звена τ - время запаздывания
- 28. Простейшие типовые звенья: усилительное, интегрирующее, дифференцирующее, апериодическое, колебательное, запаздывающее
- 29. 1. Понятие об устойчивости САР 1.1.Определение устойчивости движения 1) устойчивое 2) неустойчивое 3) нейтральное Устойчивость состояния
- 30. Выдающийся русский ученый А.М.Ляпунов основоположник учения об устойчивости движения, в качестве аналога состоянию покоя выбрал невозмущенное
- 31. В САУ, работающей по отклонению, регулятор изменяет управляющий сигнал после того, как регулируемый параметр отклонился от
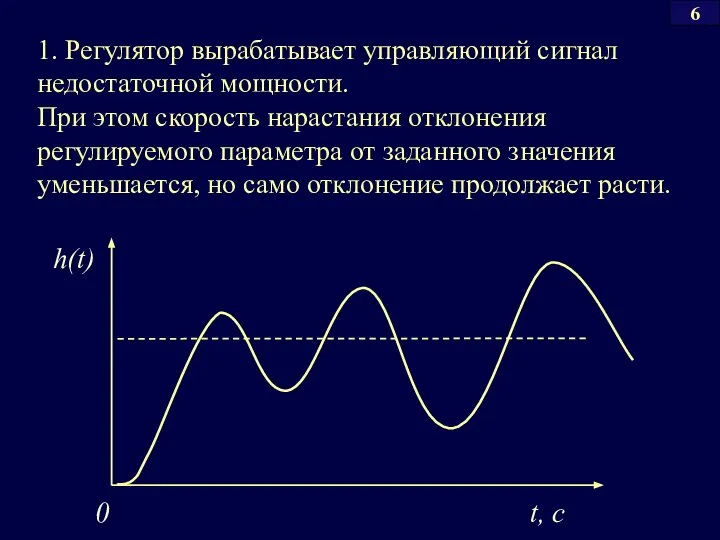
- 32. 1. Регулятор вырабатывает управляющий сигнал недостаточной мощности. При этом скорость нарастания отклонения регулируемого параметра от заданного
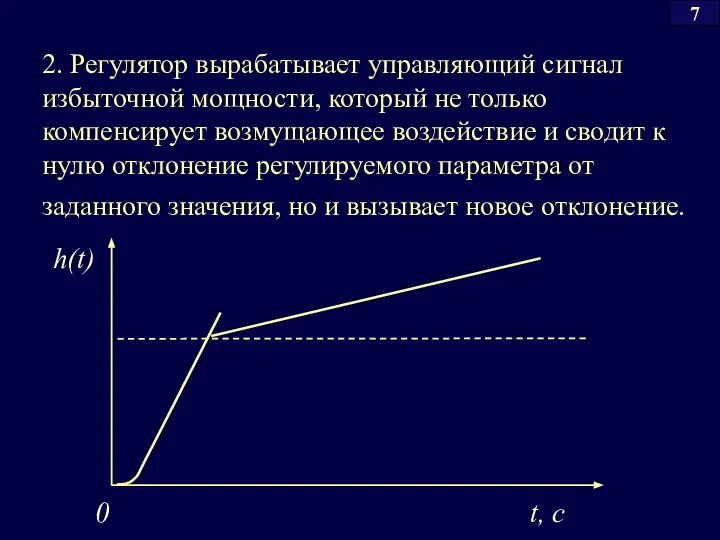
- 33. 2. Регулятор вырабатывает управляющий сигнал избыточной мощности, который не только компенсирует возмущающее воздействие и сводит к
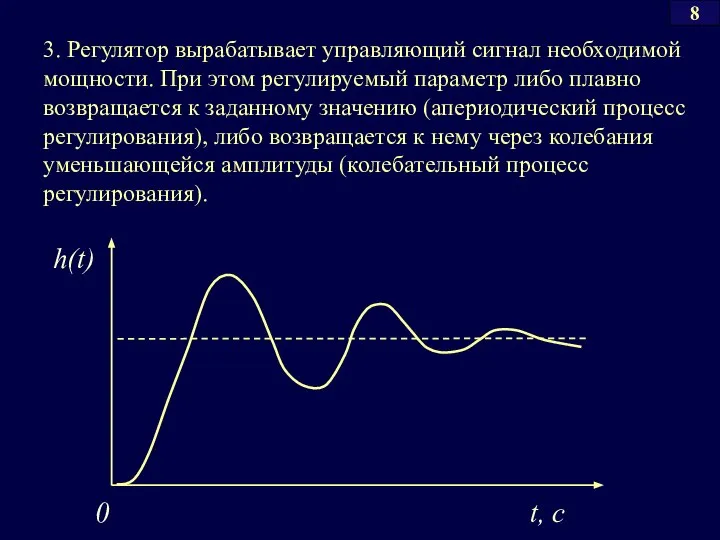
- 34. 3. Регулятор вырабатывает управляющий сигнал необходимой мощности. При этом регулируемый параметр либо плавно возвращается к заданному
- 35. 4.Понятие устойчивости. Критерии устойчивости. САР называется асимптотически устойчивой, если при указанных выше условиях она приходит строго
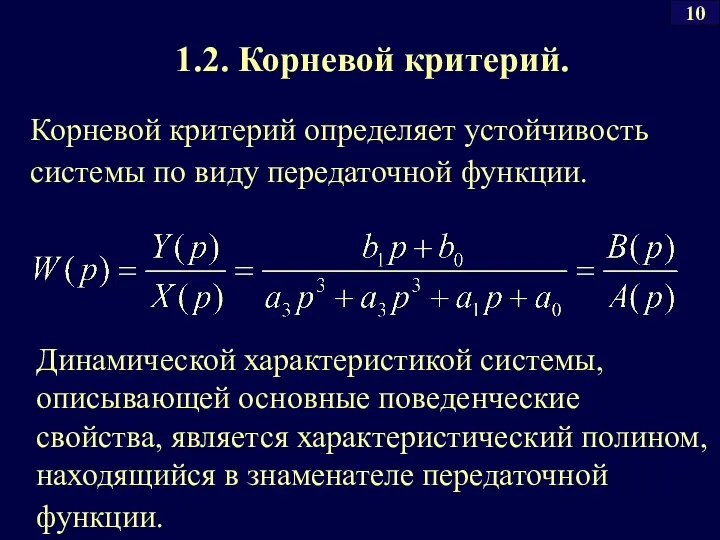
- 36. 1.2. Корневой критерий. Корневой критерий определяет устойчивость системы по виду передаточной функции. Динамической характеристикой системы, описывающей
- 37. Путем приравнивания знаменателя к нулю можно получить характеристическое уравнение, по корням которого определить устойчивость. Корни характеристического
- 38. ( Символом обозначены корни уравнения). Виды корней характеристического уравнения: - Действительные: положительные (корень 1); отрицательные (2);
- 39. (находились слева от мнимой оси на комплексной плоскости ). 1.3. Необходимые и достаточные условия устойчивости САР
- 40. 14 Если часть корней характеристического уравнения САР находятся на мнимой оси, а все остальные корни расположены
- 41. устойчивая неустойчивая 15
- 42. A(p) = anpn + an-1pn-1 + ...+ a1p + a0 = 0. 16
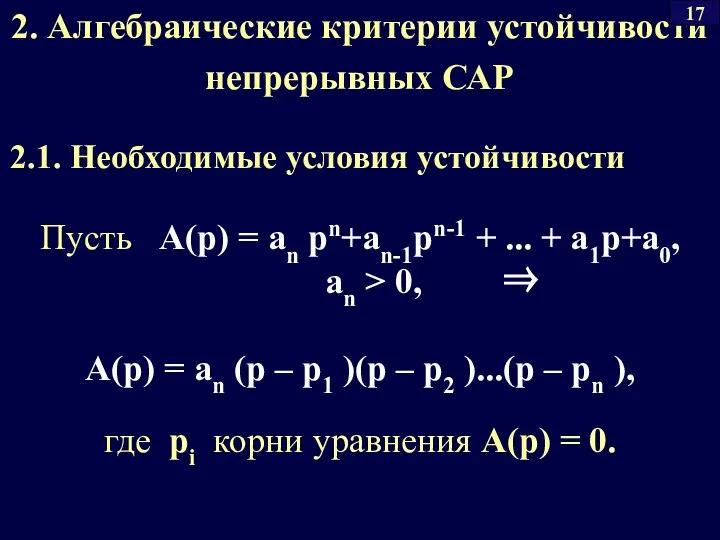
- 43. 2. Алгебраические критерии устойчивости непрерывных САР 2.1. Необходимые условия устойчивости Пусть A(p) = an pn+an-1pn-1 +
- 44. A(p) = an (p – p1 )(p – p2 )...(p – pn ), Если p1 =
- 45. Необходимые условия устойчивости : Если линейная стационарная САР устойчива, то все коэффициенты её характеристического полинома больше
- 46. САР неустойчива - a2 A(p) = p3 + 4 p + 4 - 3) A(p) =
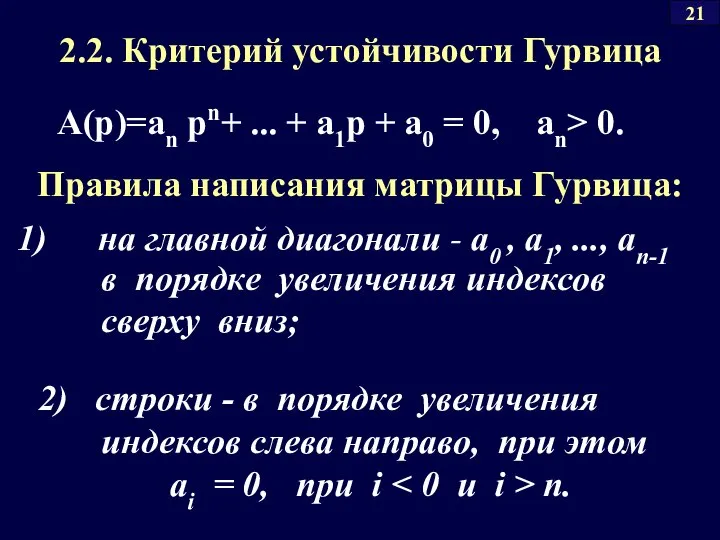
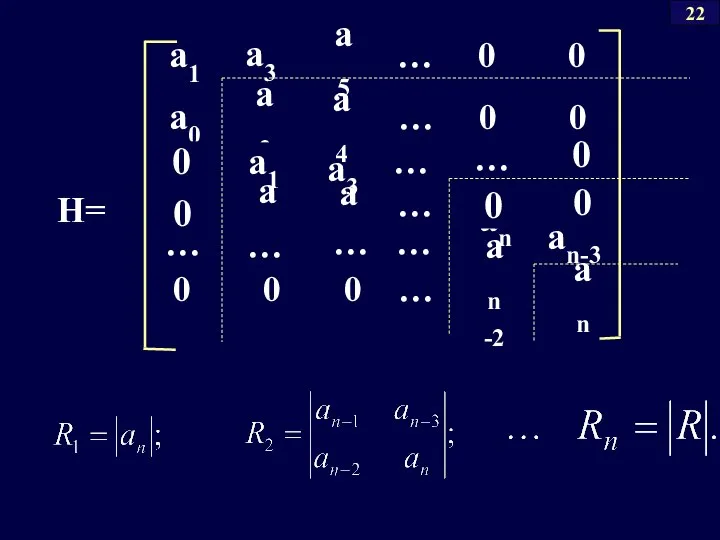
- 47. 2.2. Критерий устойчивости Гурвица A(p)=an pn+ ... + a1p + a0 = 0, an> 0. Правила
- 48. an-1 a1 an a2 a3 … a2 a0 0 0 0 an-3 0 0 0 …
- 49. Критерий Гурвица: Для того, чтобы корни характеристического уравнения САР при аn > 0 имели отрицательные действительные
- 50. Критерий Гурвица САР 2-го порядка. A(p) = a2 p2 + a1 p + a0, a2 >
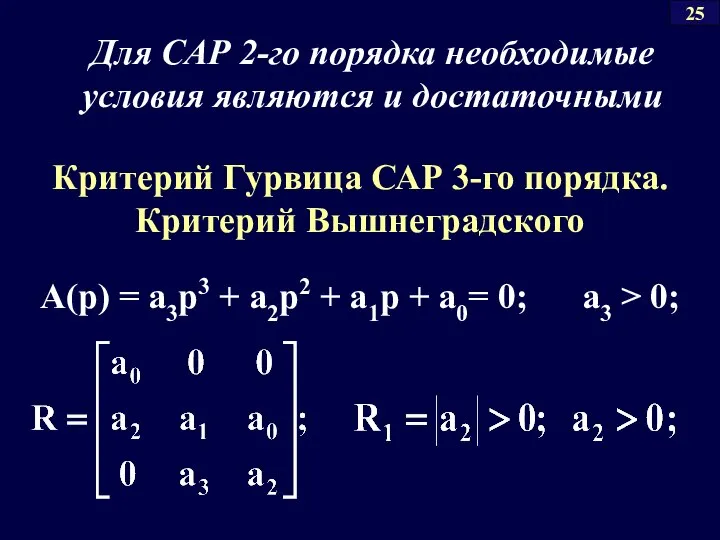
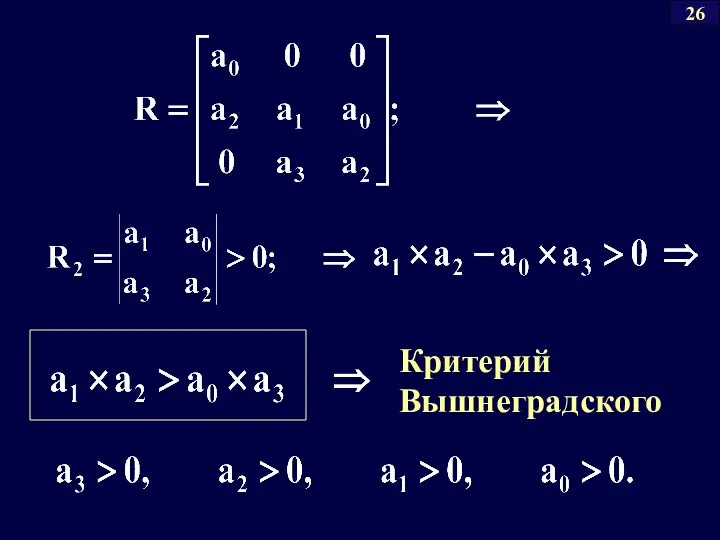
- 51. Для САР 2-го порядка необходимые условия являются и достаточными Критерий Гурвица САР 3-го порядка. Критерий Вышнеградского
- 52. Критерий Вышнеградского 26
- 53. Для того, чтобы САР 3-го порядка была устойчивой, необходимо и достаточно, чтобы все коэффициенты ее характеристического
- 54. 3. Области устойчивости САР Как влияют на устойчивость САР ее параметры? Пространство параметров, внутри которого САР
- 55. . Границы области устойчивости имеют штриховку, направленную в сторону области устойчивости. Пример. Дано: область устойчивости замкнутой
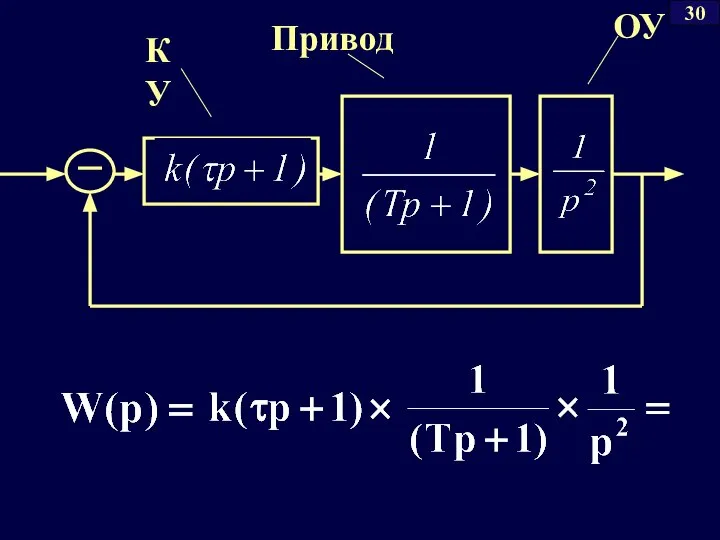
- 56. 30
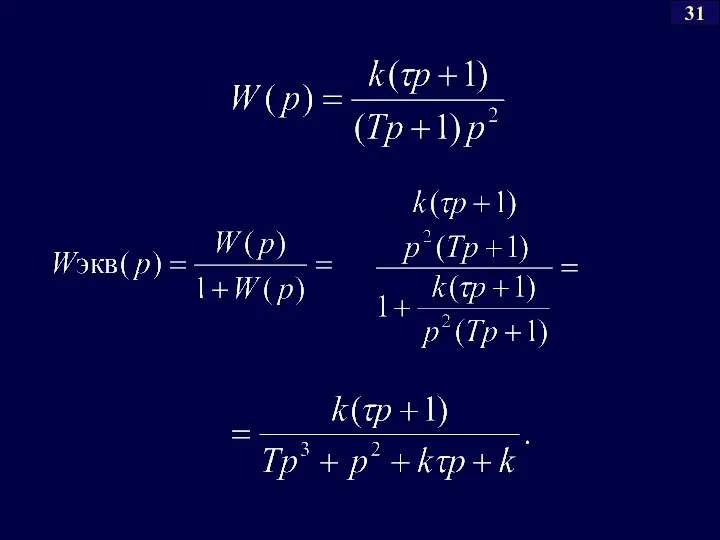
- 57. 31
- 58. По критерию Вышнеградского: Из необходимых условий ⇒ k > 0, τ > 0, k τ >
- 60. Скачать презентацию
П Л А Н Л Е К Ц И И:
1.
П Л А Н Л Е К Ц И И: 1.

3. ТОЖДЕСТВЕННЫЕ ПРЕОБРАЗОВАНИЯ СТРУКТУРНЫХ СХЕМ . ТИПОВЫЕ СОЕДИНЕНИЯ (последовательное, параллельное, параллельное-встречное).
4.
3. ТОЖДЕСТВЕННЫЕ ПРЕОБРАЗОВАНИЯ СТРУКТУРНЫХ СХЕМ . ТИПОВЫЕ СОЕДИНЕНИЯ (последовательное, параллельное, параллельное-встречное).
4.
Звеном СУ называется ее элемент, обладающий определенными свойствами в динамическом отношении.
Звеном СУ называется ее элемент, обладающий определенными свойствами в динамическом отношении.
1. КЛАССИФИКАЦИЯ ЗВЕНЬЕВ САУ
Звеном называется часть САУ, оператор которой описывается
1. КЛАССИФИКАЦИЯ ЗВЕНЬЕВ САУ
Звеном называется часть САУ, оператор которой описывается
Классификация звеньев
9
- идеальное интегрирующее
- усилительное звено
- идеальное дифференцирующее
ИДЕАЛЬНЫЕ ЗВЕНЬЯ
РЕАЛЬНЫЕ (ДИНАМИЧЕСКИЕ
Классификация звеньев
9
- идеальное интегрирующее
- усилительное звено
- идеальное дифференцирующее
ИДЕАЛЬНЫЕ ЗВЕНЬЯ
РЕАЛЬНЫЕ (ДИНАМИЧЕСКИЕ
10
РЕАЛЬНЫЕ (ДИНАМИЧЕСКИЕ ) ЗВЕНЬЯ
инерционное 1-го порядка
(апериодическое)
инерционное
2-го порядка:
колебательное
10
РЕАЛЬНЫЕ (ДИНАМИЧЕСКИЕ ) ЗВЕНЬЯ
инерционное 1-го порядка
(апериодическое)
инерционное
2-го порядка:
колебательное
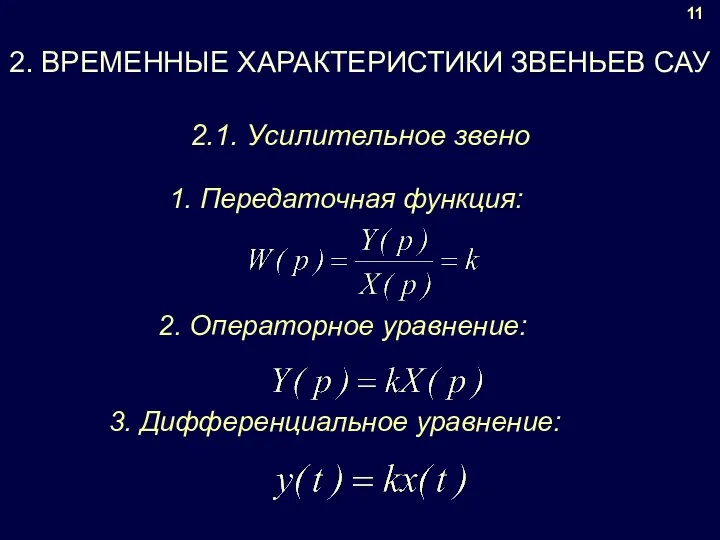
2. ВРЕМЕННЫЕ ХАРАКТЕРИСТИКИ ЗВЕНЬЕВ САУ
11
2.1. Усилительное звено
1. Передаточная функция:
2. Операторное уравнение:
3.
2. ВРЕМЕННЫЕ ХАРАКТЕРИСТИКИ ЗВЕНЬЕВ САУ
11
2.1. Усилительное звено
1. Передаточная функция:
2. Операторное уравнение:
3.
12
2.1. Усилительное звено
Примеры:
12
2.1. Усилительное звено
Примеры:
13
1. Передаточная функция:
2. Операторное уравнение:
3. Дифференциальное уравнение:
2.2. ДИФФЕРЕНЦИРУЮЩЕЕ ЗВЕНО
13
1. Передаточная функция:
2. Операторное уравнение:
3. Дифференциальное уравнение:
2.2. ДИФФЕРЕНЦИРУЮЩЕЕ ЗВЕНО
14
Идеальное дифференцирующее.
При ступенчатом входном сигнале выходной сигнал представляет собой импульс
14
Идеальное дифференцирующее.
При ступенчатом входном сигнале выходной сигнал представляет собой импульс
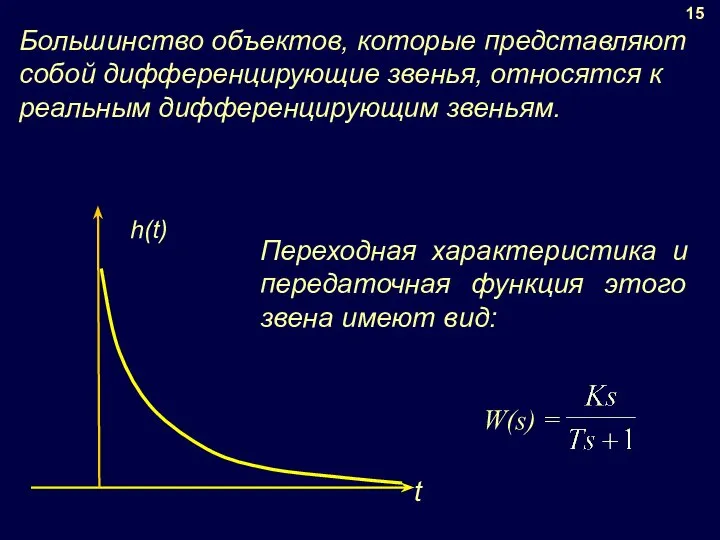
Большинство объектов, которые представляют собой дифференцирующие звенья, относятся к реальным дифференцирующим
Большинство объектов, которые представляют собой дифференцирующие звенья, относятся к реальным дифференцирующим
16
1. Передаточная функция:
2. Операторное уравнение:
3. Дифференциальное уравнение этого звена устанавливает пропорциональность
16
1. Передаточная функция:
2. Операторное уравнение:
3. Дифференциальное уравнение этого звена устанавливает пропорциональность
Идеальное интегрирующее
Выходная величина идеального интегрирующего звена пропорциональна интегралу входной величины.
Идеальное интегрирующее
Выходная величина идеального интегрирующего звена пропорциональна интегралу входной величины.
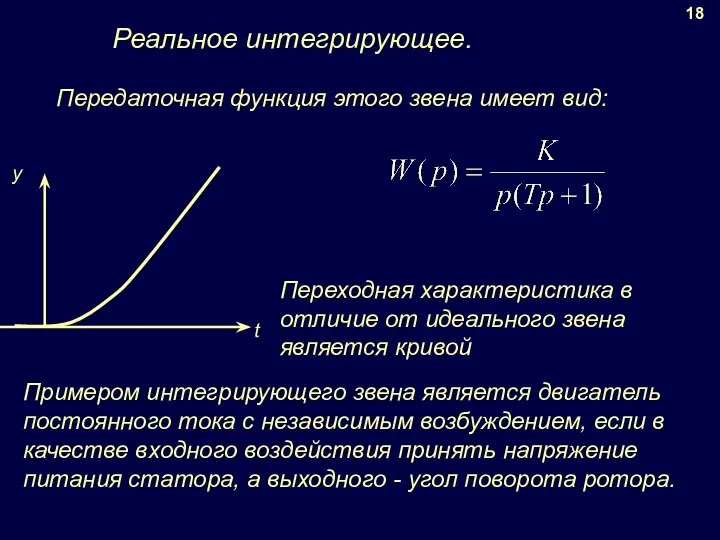
Реальное интегрирующее.
Примером интегрирующего звена является двигатель постоянного тока с независимым
Реальное интегрирующее.
Примером интегрирующего звена является двигатель постоянного тока с независимым
19
1. Передаточная функция:
2. Операторное уравнение:
3. Дифференциальное уравнение:
2.4. АПЕРИОДИЧЕСКОЕ ЗВЕНО
19
1. Передаточная функция:
2. Операторное уравнение:
3. Дифференциальное уравнение:
2.4. АПЕРИОДИЧЕСКОЕ ЗВЕНО
20
Свойства переходной функции:
h(∞)=k
σ = 0 %
20
Свойства переходной функции:
h(∞)=k
σ = 0 %
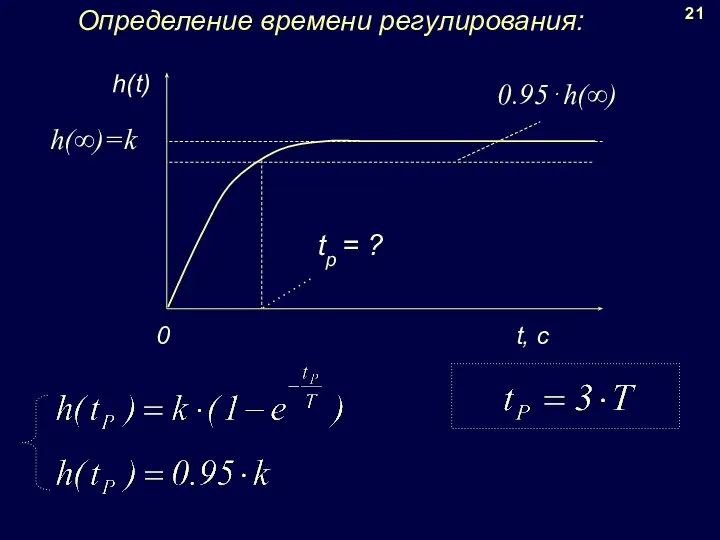
Определение времени регулирования:
21
Определение времени регулирования:
21
22
Примеры апериодических звеньев
x – угол открытия крана
y – температура
22
Примеры апериодических звеньев
x – угол открытия крана
y – температура
23
2.5. КОЛЕБАТЕЛЬНОЕ ЗВЕНО
ПФ:
При подаче на вход ступенчатого воздействия амплитудой х0
23
2.5. КОЛЕБАТЕЛЬНОЕ ЗВЕНО
ПФ:
При подаче на вход ступенчатого воздействия амплитудой х0
24
ξ ≥ 1 - апериодическое звено 2-го порядка
24
ξ ≥ 1 - апериодическое звено 2-го порядка
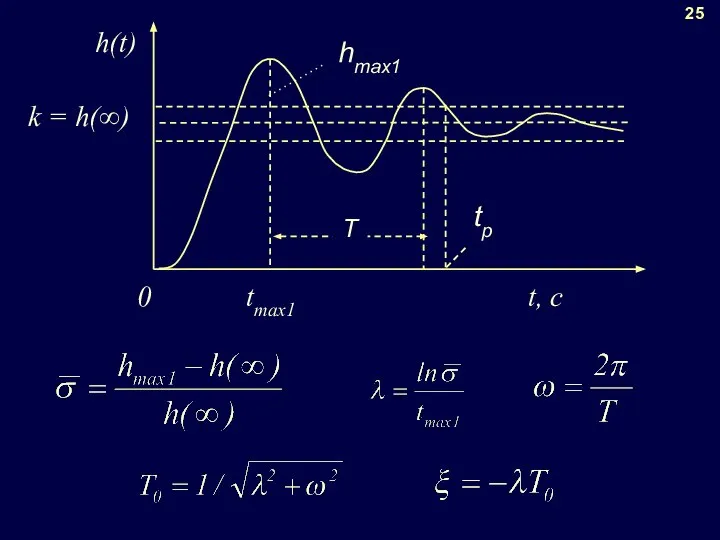
k = h(∞)
hmax1
25
k = h(∞)
hmax1
25
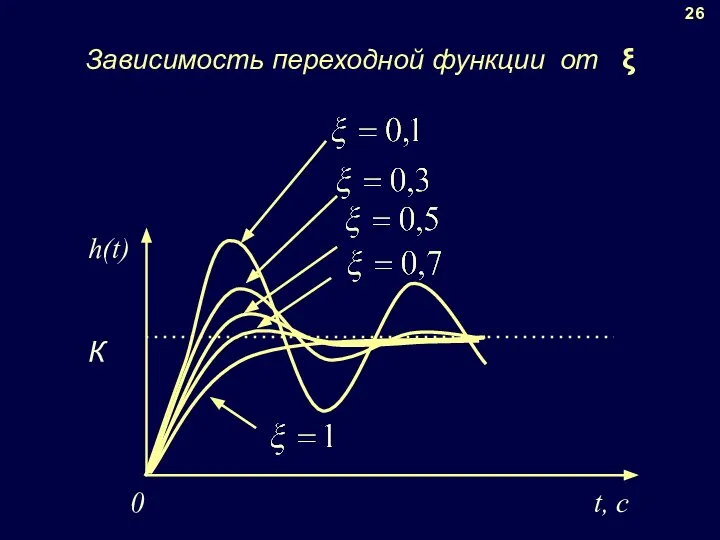
Зависимость переходной функции от ξ
26
Зависимость переходной функции от ξ
26
27
Оптимальная переходная функция
ξopt = 0.707
tР ≈ 3 T
σ < 5%
27
Оптимальная переходная функция
ξopt = 0.707
tР ≈ 3 T
σ < 5%
28
ПРИМЕРЫ КОЛЕБАТЕЛЬНЫХ ЗВЕНЬЕВ:
Колебания –
результат
взаимодействия сил
- электрические цепи,
включающие активное сопротивление, емкость
28
ПРИМЕРЫ КОЛЕБАТЕЛЬНЫХ ЗВЕНЬЕВ:
Колебания –
результат
взаимодействия сил
- электрические цепи,
включающие активное сопротивление, емкость
2.6. ЗАПАЗДЫВАНИЕ В САУ
29
Звеном с запаздыванием называется
элемент САУ, оператор
2.6. ЗАПАЗДЫВАНИЕ В САУ
29
Звеном с запаздыванием называется
элемент САУ, оператор
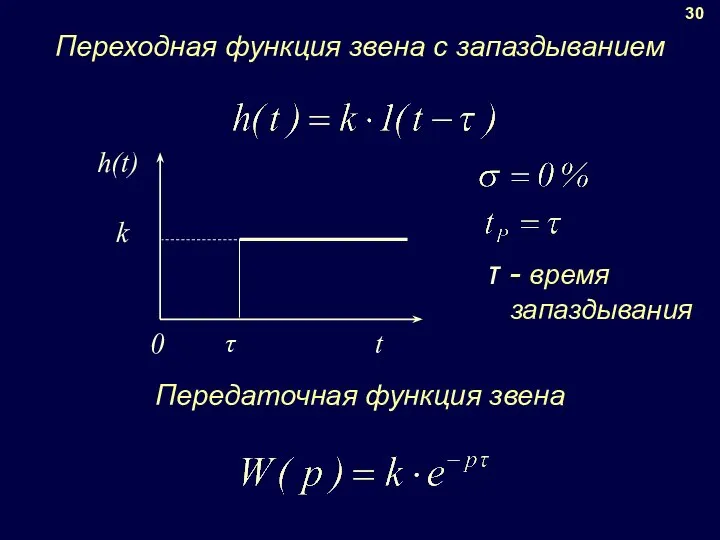
Переходная функция звена с запаздыванием
30
τ
Передаточная функция звена
τ - время
запаздывания
Переходная функция звена с запаздыванием
30
τ
Передаточная функция звена
τ - время
запаздывания
Простейшие типовые звенья:
усилительное,
интегрирующее,
дифференцирующее,
апериодическое,
колебательное,
запаздывающее
Простейшие типовые звенья:
усилительное,
интегрирующее,
дифференцирующее,
апериодическое,
колебательное,
запаздывающее
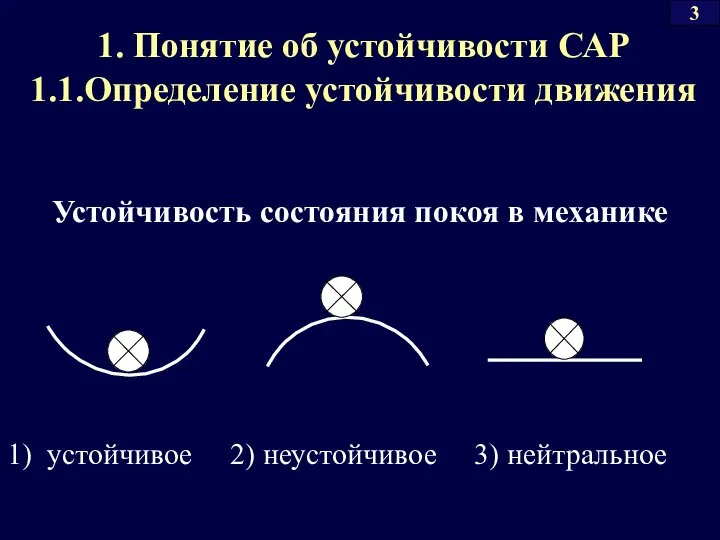
1. Понятие об устойчивости САР
1.1.Определение устойчивости движения
1) устойчивое 2) неустойчивое 3)
1.1.Определение устойчивости движения
1) устойчивое 2) неустойчивое 3)
Выдающийся русский ученый А.М.Ляпунов
основоположник учения об устойчивости
движения, в
Выдающийся русский ученый А.М.Ляпунов
основоположник учения об устойчивости
движения, в
В САУ, работающей по отклонению, регулятор изменяет управляющий сигнал после того,
В САУ, работающей по отклонению, регулятор изменяет управляющий сигнал после того,
1. Регулятор вырабатывает управляющий сигнал недостаточной мощности.
При этом скорость нарастания
1. Регулятор вырабатывает управляющий сигнал недостаточной мощности.
При этом скорость нарастания
2. Регулятор вырабатывает управляющий сигнал избыточной мощности, который не только компенсирует
2. Регулятор вырабатывает управляющий сигнал избыточной мощности, который не только компенсирует
3. Регулятор вырабатывает управляющий сигнал необходимой мощности. При этом регулируемый параметр
3. Регулятор вырабатывает управляющий сигнал необходимой мощности. При этом регулируемый параметр
4.Понятие устойчивости. Критерии устойчивости.
САР называется асимптотически
устойчивой, если при указанных выше
4.Понятие устойчивости. Критерии устойчивости.
САР называется асимптотически
устойчивой, если при указанных выше
1.2. Корневой критерий.
Корневой критерий определяет устойчивость системы по виду передаточной функции.
1.2. Корневой критерий.
Корневой критерий определяет устойчивость системы по виду передаточной функции.
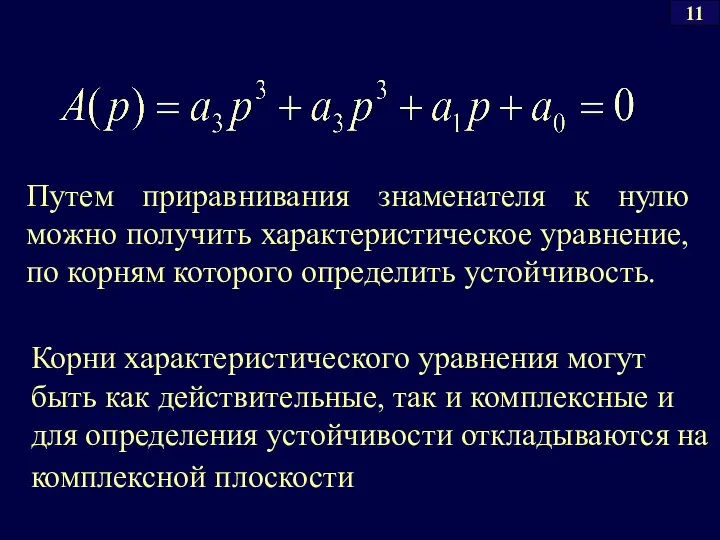
Путем приравнивания знаменателя к нулю можно получить характеристическое уравнение, по корням
Путем приравнивания знаменателя к нулю можно получить характеристическое уравнение, по корням
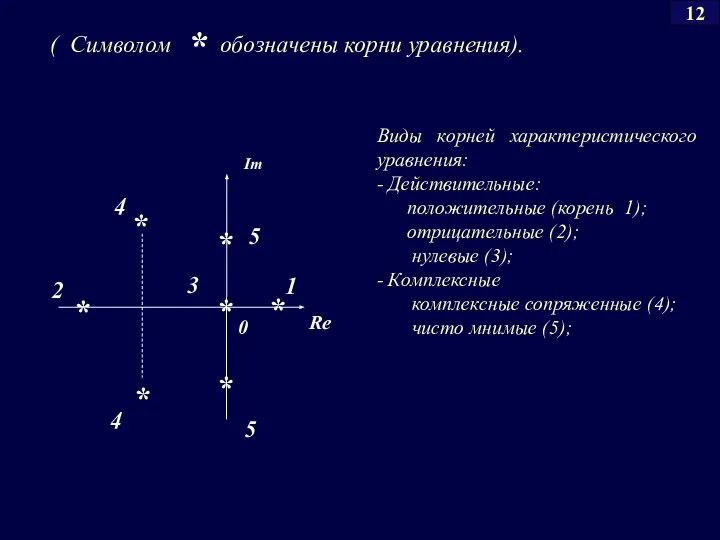
( Символом обозначены корни уравнения).
Виды корней характеристического уравнения:
- Действительные:
положительные (корень
( Символом обозначены корни уравнения).
Виды корней характеристического уравнения:
- Действительные:
положительные (корень
(находились слева от мнимой оси на комплексной плоскости ).
1.3. Необходимые
(находились слева от мнимой оси на комплексной плоскости ).
1.3. Необходимые

14
Если часть корней характеристического
уравнения САР находятся на мнимой оси, а
14
Если часть корней характеристического
уравнения САР находятся на мнимой оси, а
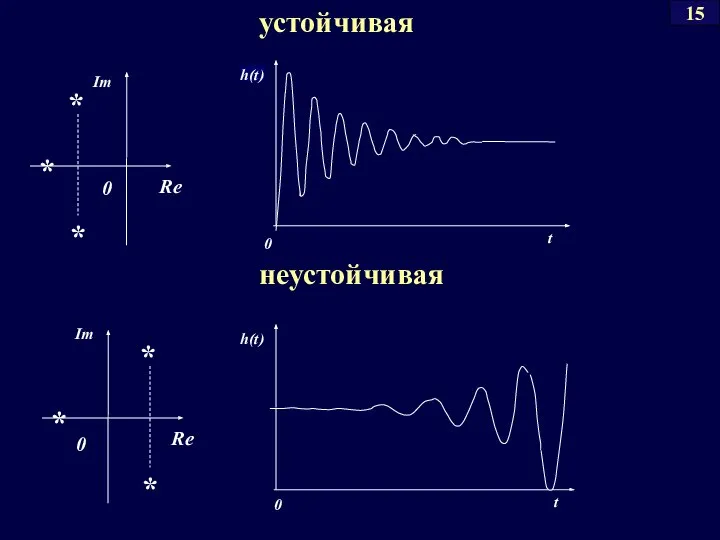
устойчивая
неустойчивая
15
устойчивая
неустойчивая
15
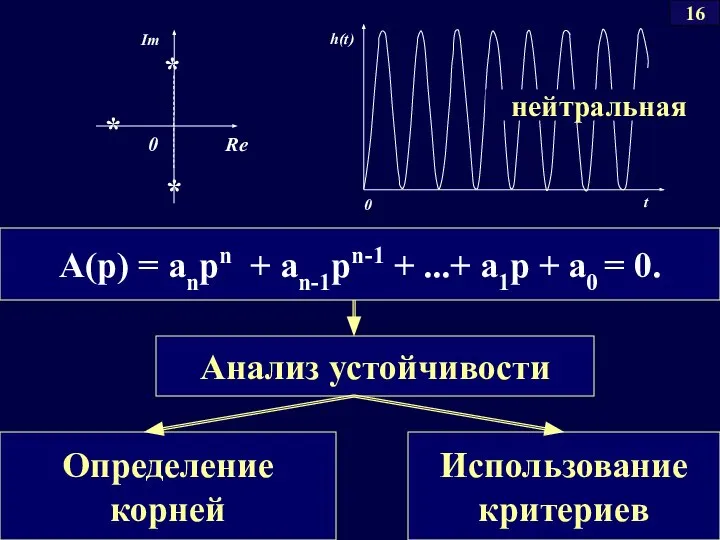
A(p) = anpn + an-1pn-1 + ...+ a1p + a0 =
A(p) = anpn + an-1pn-1 + ...+ a1p + a0 =
2. Алгебраические критерии устойчивости непрерывных САР
2.1. Необходимые условия устойчивости
Пусть A(p) =
2. Алгебраические критерии устойчивости непрерывных САР
2.1. Необходимые условия устойчивости
Пусть A(p) =
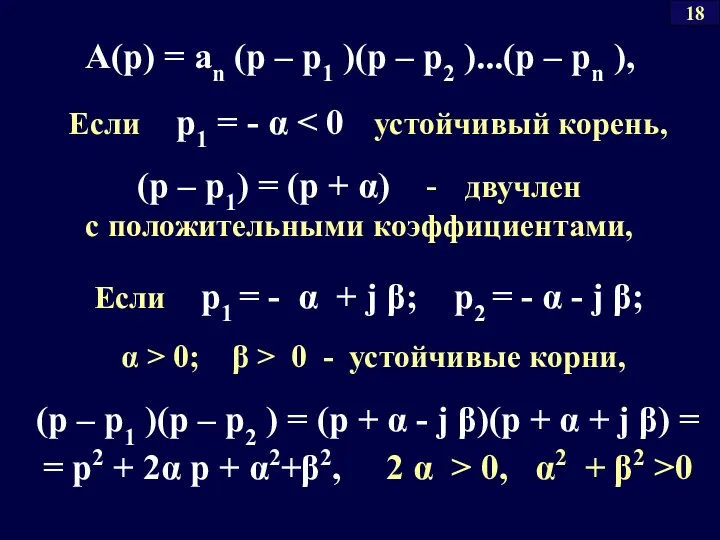
A(p) = an (p – p1 )(p – p2 )...(p –
A(p) = an (p – p1 )(p – p2 )...(p –
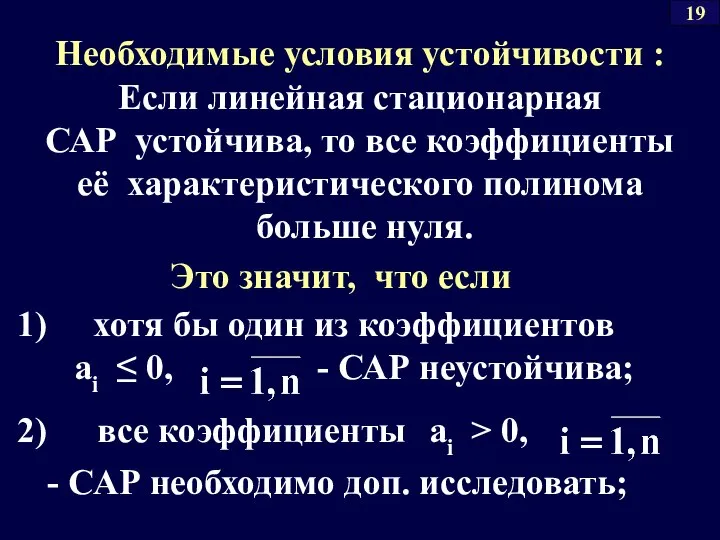
Необходимые условия устойчивости : Если линейная стационарная
САР устойчива, то все
Необходимые условия устойчивости : Если линейная стационарная
САР устойчива, то все
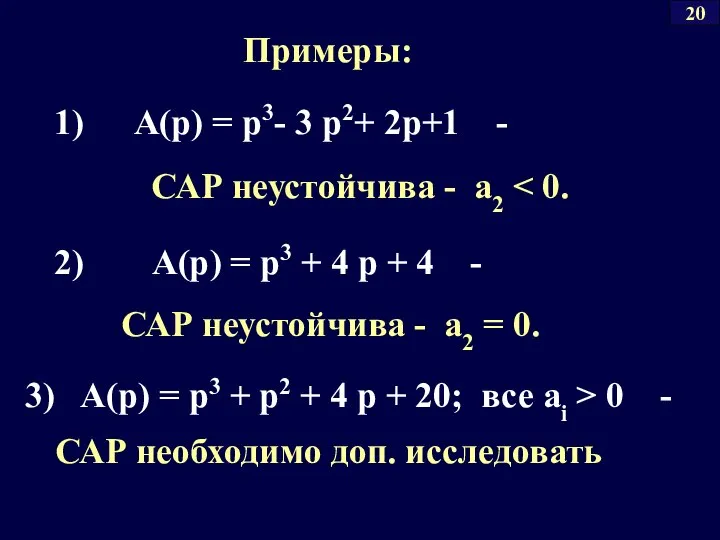
САР неустойчива - a2 < 0.
A(p) = p3 +
САР неустойчива - a2 < 0.
A(p) = p3 +
2.2. Критерий устойчивости Гурвица
A(p)=an pn+ ... + a1p + a0
2.2. Критерий устойчивости Гурвица
A(p)=an pn+ ... + a1p + a0
an-1
a1
an
a2
a3
…
a2
a0
0
0
0
an-3
0 0 0 …
22
an-2
a0
… 0 0
a4
…
…
…
…
0
a1
…
…
0
Н=
an-1
a1
an
a2
a3
…
a2
a0
0
0
0
an-3
0 0 0 …
22
an-2
a0
… 0 0
a4
…
…
…
…
0
a1
…
…
0
Н=
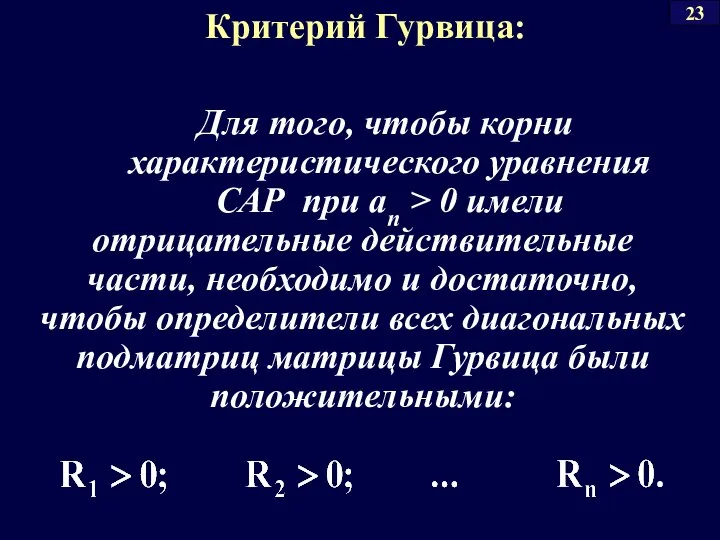
Критерий Гурвица:
Для того, чтобы корни
характеристического уравнения
САР при аn
Критерий Гурвица:
Для того, чтобы корни
характеристического уравнения
САР при аn
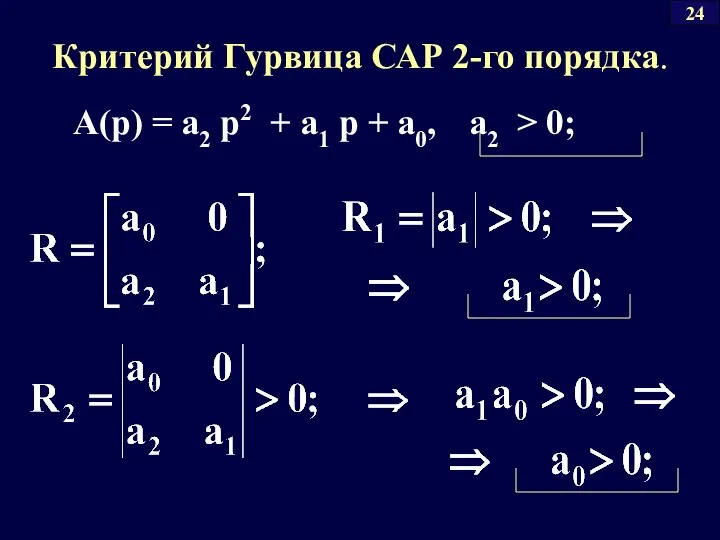
Критерий Гурвица САР 2-го порядка.
A(p) = a2 p2 + a1 p
Критерий Гурвица САР 2-го порядка.
A(p) = a2 p2 + a1 p
Для САР 2-го порядка необходимые
условия являются и достаточными
Критерий Гурвица САР 3-го
Для САР 2-го порядка необходимые
условия являются и достаточными
Критерий Гурвица САР 3-го
Критерий Вышнеградского
26
Критерий Вышнеградского
26

Для того, чтобы САР 3-го порядка была устойчивой, необходимо и достаточно,
Для того, чтобы САР 3-го порядка была устойчивой, необходимо и достаточно,
3. Области устойчивости САР
Как влияют на устойчивость САР
ее параметры?
Пространство параметров,
3. Области устойчивости САР
Как влияют на устойчивость САР
ее параметры?
Пространство параметров,
. Границы области устойчивости имеют штриховку, направленную в сторону области устойчивости.
Пример.
Дано:
область
. Границы области устойчивости имеют штриховку, направленную в сторону области устойчивости.
Пример.
Дано:
область
30
30
31
31
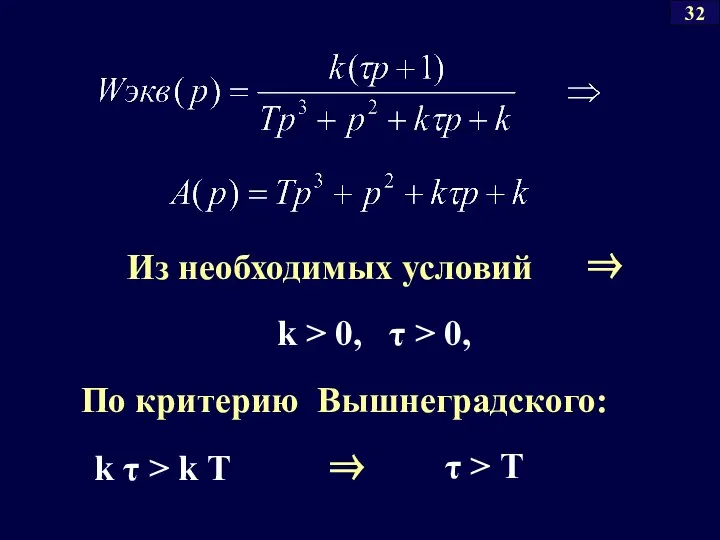
По критерию Вышнеградского:
Из необходимых условий ⇒
k > 0, τ >
По критерию Вышнеградского:
Из необходимых условий ⇒
k > 0, τ >
 Оптические методы изучения вещества
Оптические методы изучения вещества Интерференция волн
Интерференция волн Топки. Пылеприготовление. Котельные установки
Топки. Пылеприготовление. Котельные установки Волны Эллиотта
Волны Эллиотта Система сходящихся сил. Основные понятия статики
Система сходящихся сил. Основные понятия статики Методи дослідження наносистем: спектроскопічні та дифракційні методи
Методи дослідження наносистем: спектроскопічні та дифракційні методи Отражение звука
Отражение звука Характеристика систем электроснабжения воздушных судов. Состав, назначение и классификация систем электроснабжения. (Тема 1.1)
Характеристика систем электроснабжения воздушных судов. Состав, назначение и классификация систем электроснабжения. (Тема 1.1) Механическое движение тела
Механическое движение тела Кинематический расчет механизмов металлорежущих станков
Кинематический расчет механизмов металлорежущих станков Тепловые электростанции
Тепловые электростанции  Основные принципы современного естетсвозанния. Происхождение и структура Вселенной. Уровень элементарных частиц
Основные принципы современного естетсвозанния. Происхождение и структура Вселенной. Уровень элементарных частиц Презентация по физике "Эволюция учения об атоме" - скачать
Презентация по физике "Эволюция учения об атоме" - скачать  Радиация. Ионизирующее излучение
Радиация. Ионизирующее излучение Влияние научных трудов Х.Эрстеда, М.Фарадея, Д.Максвелла и Г.Герца на возникновение радиотехники
Влияние научных трудов Х.Эрстеда, М.Фарадея, Д.Максвелла и Г.Герца на возникновение радиотехники Основные понятия и законы электрических цепей
Основные понятия и законы электрических цепей Рентгенівське випромінювання
Рентгенівське випромінювання  Постоянный ток. Электрическая цепь постоянного тока
Постоянный ток. Электрическая цепь постоянного тока Альберт Эйнштейн и специальная теория относительности
Альберт Эйнштейн и специальная теория относительности Поверхностное натяжение и поверхностная энергия жидкостей
Поверхностное натяжение и поверхностная энергия жидкостей Первое начало термодинамики. Температура. (Лекция 3)
Первое начало термодинамики. Температура. (Лекция 3) Тема: «Различные методы исследования законов постоянного тока» Цель урока: проверить известные зависимости R(L), R(S), R(ρ), I(U),I(R) и уст
Тема: «Различные методы исследования законов постоянного тока» Цель урока: проверить известные зависимости R(L), R(S), R(ρ), I(U),I(R) и уст «Основы термодинамики»
«Основы термодинамики» Звуковые волны
Звуковые волны Работа и мощность электрического тока
Работа и мощность электрического тока Проведение технического обслуживания и ремонта МТП с восстановлением работоспособности плуга ПН-5-35 в сельскохоз. предприятии
Проведение технического обслуживания и ремонта МТП с восстановлением работоспособности плуга ПН-5-35 в сельскохоз. предприятии Методы получения изображений видимого излучения
Методы получения изображений видимого излучения Состав и схемы автоматических систем
Состав и схемы автоматических систем