- Вращение твердого тела. (Лекция 5)

Содержание
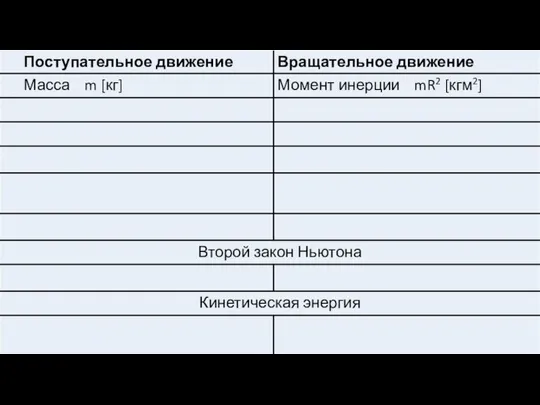
- 7. Мы видим, что формулы динамики поступательного и вращательного движения по форме похожи друг на друга. Для
- 10. Волчок (юла) всем известная игрушка, которая будучи раскрученной вокруг своей оси не падает при постановке ее
- 11. Вектор этого момента, будет перпенди-кулярен плоскости, в которой находятся векторы r и mg. Поэтому приращение вектора
- 13. Чем больше момент импульса вращающегося волчка, тем меньше скорость его прецессии. Уменьшая момент внешних сил –
- 14. Это обеспечивается законом сохранения момента импульса, поскольку внешний вращающий момент, действующий на ротор, очень мал. Даже
- 15. Земля не является инерциальной системой отсчета. Причиной этого является ее суточное вращение. Ось гироскопа, оставаясь неподвижной
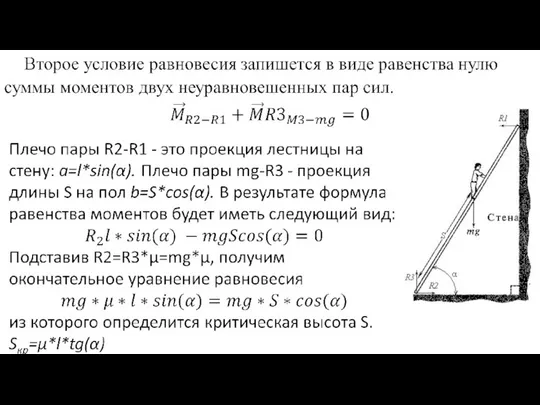
- 16. Статика - это раздел механики, который можно назвать противоположностью динамики. Если динамика изучает законы движения тел,
- 18. Поэтому, важным этапом решения является упрощение исходной конфигурации сил, приложенных к телу. Упрощение основано на преобразовании
- 19. В простейшем случае система сил состоит из одной силы F, которая определяется величиной (модулем), направлением, и
- 21. Если на тело действует уравновешенная пара сил, то при перемещении точки приложения любой из сил по
- 22. Действительно, если на тело действует сила Р (Рис. а), то добавив уравновешенную пару сил Р' -
- 23. Если точка приложения силы переносится не по линии ее действия, то используется следующая Лемма о параллельном
- 24. Силы реакции. Тело называется свободным, если его перемещения ничем не ограничены. Тело, перемещения которого ограничены другими
- 25. Принцип освобождаемоcти. Всякое несвободное тело можно рассматривать как свободное, если действие связей заменить их реакциями, приложенными
- 29. Скачать презентацию
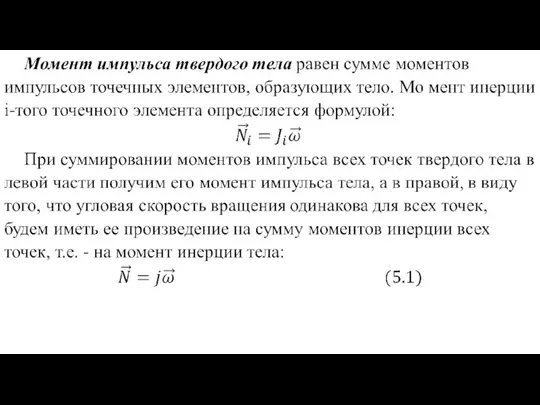
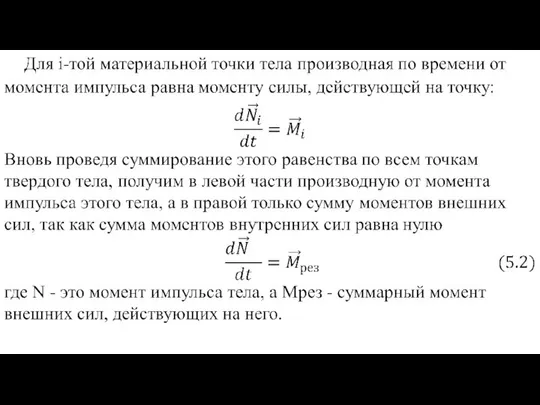
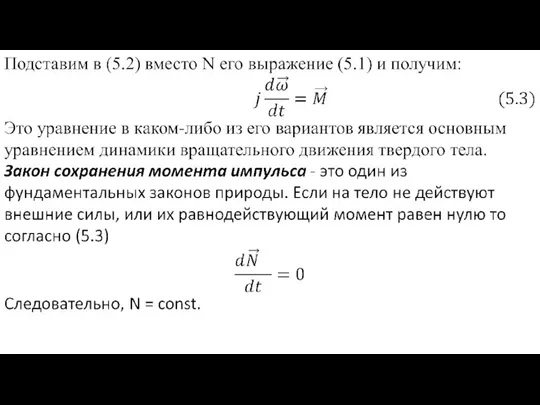
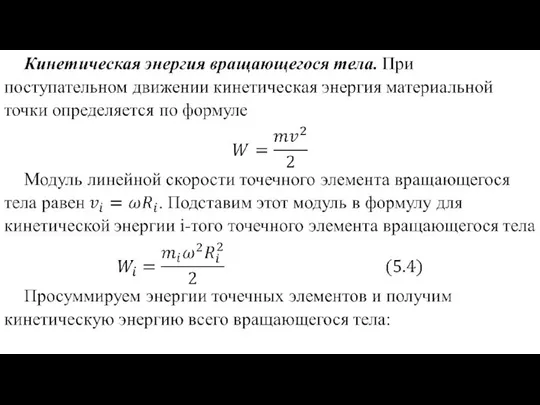

Мы видим, что формулы динамики поступательного и вращательного движения по форме
Мы видим, что формулы динамики поступательного и вращательного движения по форме
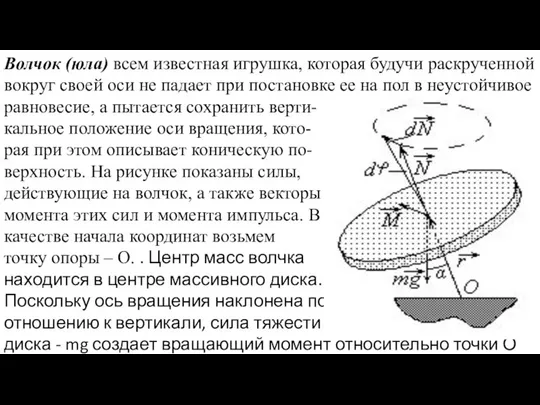
Волчок (юла) всем известная игрушка, которая будучи раскрученной вокруг своей оси
Волчок (юла) всем известная игрушка, которая будучи раскрученной вокруг своей оси
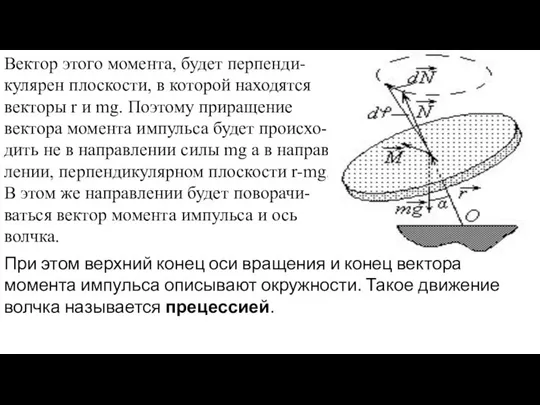
Вектор этого момента, будет перпенди-кулярен плоскости, в которой находятся векторы r
Вектор этого момента, будет перпенди-кулярен плоскости, в которой находятся векторы r
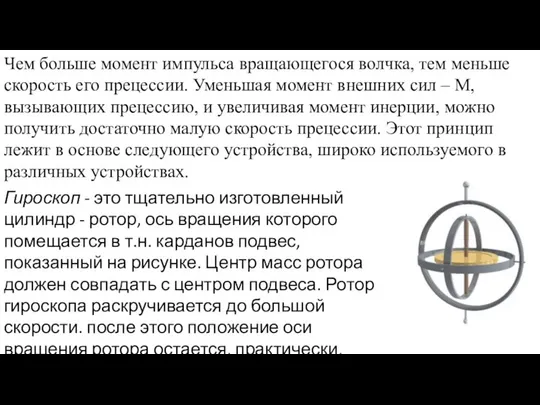
Чем больше момент импульса вращающегося волчка, тем меньше скорость его прецессии.
Чем больше момент импульса вращающегося волчка, тем меньше скорость его прецессии.
Это обеспечивается законом сохранения момента импульса, поскольку внешний вращающий момент,
Это обеспечивается законом сохранения момента импульса, поскольку внешний вращающий момент,
Земля не является инерциальной системой отсчета. Причиной этого является ее суточное
Земля не является инерциальной системой отсчета. Причиной этого является ее суточное
Статика - это раздел механики, который можно назвать противоположностью динамики. Если
Статика - это раздел механики, который можно назвать противоположностью динамики. Если
Поэтому, важным этапом решения является упрощение исходной конфигурации сил, приложенных к
Поэтому, важным этапом решения является упрощение исходной конфигурации сил, приложенных к
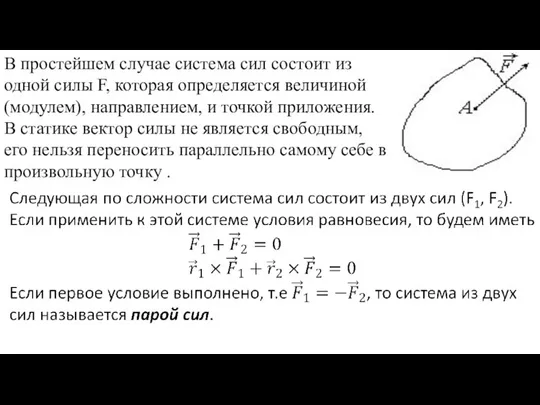
В простейшем случае система сил состоит из одной силы F, которая
В простейшем случае система сил состоит из одной силы F, которая
Если на тело действует уравновешенная пара сил, то при перемещении точки
Если на тело действует уравновешенная пара сил, то при перемещении точки
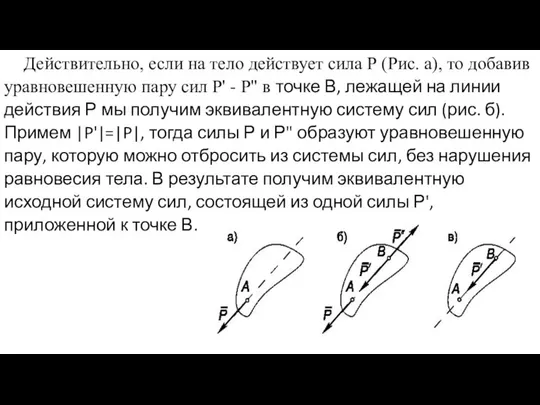
Действительно, если на тело действует сила Р (Рис. а), то добавив
Действительно, если на тело действует сила Р (Рис. а), то добавив
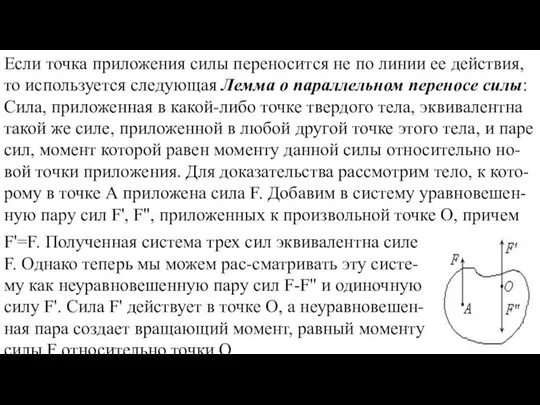
Если точка приложения силы переносится не по линии ее действия, то
Если точка приложения силы переносится не по линии ее действия, то
Силы реакции. Тело называется свободным, если его перемещения ничем не ограничены.
Силы реакции. Тело называется свободным, если его перемещения ничем не ограничены.
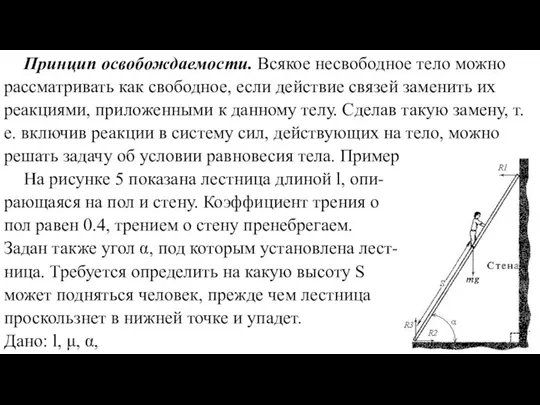
Принцип освобождаемоcти. Всякое несвободное тело можно рассматривать как свободное, если действие
Принцип освобождаемоcти. Всякое несвободное тело можно рассматривать как свободное, если действие
 План трассы. Вписывание круговых кривых с переходными кривыми
План трассы. Вписывание круговых кривых с переходными кривыми Презентация по физике "Системы цветопередачи" - скачать
Презентация по физике "Системы цветопередачи" - скачать  Внесок українських вчених у розвиток науки. Історія фізики
Внесок українських вчених у розвиток науки. Історія фізики Молекуляроно-кинетическая теория
Молекуляроно-кинетическая теория Делимость электрического заряда. Электрон
Делимость электрического заряда. Электрон Оборудование АЭС
Оборудование АЭС Кроссворды по физике
Кроссворды по физике Магнитооптика ферромагнитных металлов
Магнитооптика ферромагнитных металлов Презентация по физике Молекулярная физика и термодинамика
Презентация по физике Молекулярная физика и термодинамика  Последовательное соединение проводников
Последовательное соединение проводников Кривошипно-шатунный механизм. Назначение
Кривошипно-шатунный механизм. Назначение ПЕРВОЕ НАЧАЛО ТЕРМОДИНАМИКИ. ВНУТРЕННЯЯ ЭНЕРГИЯ. РАБОТА И ТЕПЛОТА 1. Внутренняя энергия. Работа и теплота 2. Теплоёмкость идеал
ПЕРВОЕ НАЧАЛО ТЕРМОДИНАМИКИ. ВНУТРЕННЯЯ ЭНЕРГИЯ. РАБОТА И ТЕПЛОТА 1. Внутренняя энергия. Работа и теплота 2. Теплоёмкость идеал Идеальный газ в молекулярно-кинетической теории. Среднее значение квадрата скорости молекул
Идеальный газ в молекулярно-кинетической теории. Среднее значение квадрата скорости молекул Sbs – silicon bidirectional switch
Sbs – silicon bidirectional switch Тест по физике Выполнил ученик 11 «А» класса Серый Константин
Тест по физике Выполнил ученик 11 «А» класса Серый Константин Тепловые электростанции
Тепловые электростанции  Сохранение импульса. Момент сил. Силы инерции. (Лекция 6)
Сохранение импульса. Момент сил. Силы инерции. (Лекция 6) Сила пружності. Закон Гука
Сила пружності. Закон Гука Математические модели и методы оптимизации процессов пространственного маневрирования морских подвижных объектов
Математические модели и методы оптимизации процессов пространственного маневрирования морских подвижных объектов Урок технологии 5 класс раздел: Элементы машиноведения
Урок технологии 5 класс раздел: Элементы машиноведения Лекция 2. Моделирование технологических процессов. Аналитические аппроксимации распределения ионов
Лекция 2. Моделирование технологических процессов. Аналитические аппроксимации распределения ионов Соединения деталей машин Соединения деталей машин Сварные соединения Классификация и разновидности сварных соединений (швов) С
Соединения деталей машин Соединения деталей машин Сварные соединения Классификация и разновидности сварных соединений (швов) С Строение и свойства кристаллических тел
Строение и свойства кристаллических тел Физика колебаний
Физика колебаний Соединение проводников
Соединение проводников Применение первого закона термодинамики к различным процессам
Применение первого закона термодинамики к различным процессам Изучение конструкции и исследование цилиндрическими редуктора зубчатыми колесами
Изучение конструкции и исследование цилиндрическими редуктора зубчатыми колесами Физика в мультфильмах
Физика в мультфильмах