- Беспроводные сенсорные сети

Содержание
- 3. Сенсоры 21 ideas for the 21st century (Business Week, August 30, 1999). Беспроводные сенсорные сети (Wireless
- 4. История развития направления u-Korea, февраль 2005 года ICACT’2005 u-Россия, 21 апреля 2005 года, НТС ЦНИИС u-Japan,
- 5. Всепроникающие сенсорные сети
- 6. Архитектура сенсорной сети
- 7. Особенности сенсорных сетей Очень большое число узлов сети (больше 64000 в одной сети ZigBee, триллионные сети).
- 8. Структура БСС
- 9. Примеры сенсорных узлов Размеры Внешний вид с антенной
- 10. Структура сенсорного узла
- 11. Создание БСС
- 12. Проактивные и Реактивные БСС На основе способа функционирования и целевого применения сенсорных сетей они могут быть
- 13. Гомогенные и Гетерогенные БСС Сенсорные сети могут быть разделены на два основных типа Гомогенные (однородные) и
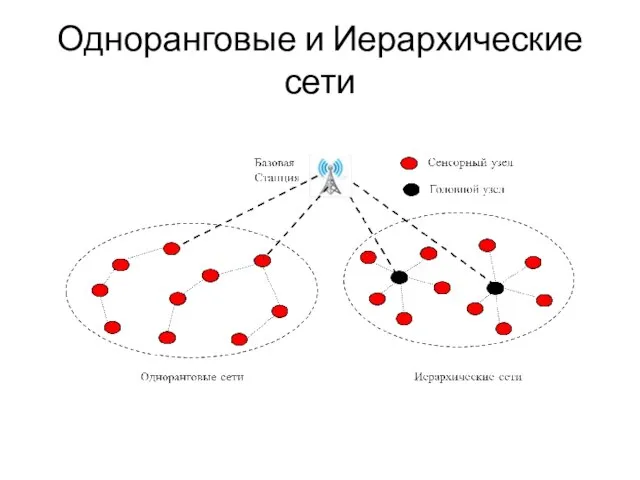
- 14. Одноранговые и Иерархические сети БСС могут быть классифицированы в зависимости от структуры сети на Одноранговые и
- 15. Одноранговые и Иерархические сети
- 16. Случайное и детерминированное размещение сенсорных узлов БСС могут быть классифицированы в зависимости от метода размещения сенсорных
- 17. Статичность и Мобильность Потребность в мониторинге людей, животных и вещей в целом вызывает необходимость применения мобильных
- 18. Двумерные и трехмерные беспроводные сенсорные сети БСС могут быть также классифицированы на двумерные и трехмерные беспроводные
- 19. Маршрутизация в беспроводных сенсорных сетях
- 20. Особенности маршрутизации в БСС (1) Традиционная адресация на основе IP-протоколов не может быть применена к БСС
- 21. Особенности маршрутизации в БСС (2) Ресурсы сенсорных узлов в беспроводных сенсорных сетях ограничены с точки зрения
- 22. Особенности маршрутизации в БСС (3) Сенсорные узлы как очень простые элементы зачастую ненадежны. Топология сенсорных сетей
- 23. Особенности маршрутизации в БСС (4) Некоторые узлы в сети осуществляют одни и те же цели, то
- 24. Протоколы USN 1. ZigBee. 2. 6LoWPAN (IPv6 Low energy protocol for Wireless Personal Area Networks, физический
- 25. Алгоритмы выбора головного узла
- 26. Потребление энергии (Энергетическая эффективность) Идеальный алгоритм должен обеспечить своевременную передачу информации с заданной точностью и c
- 27. Модель передачи данных Сбор и передача данных в БСС зависят от приложения и актуальности представления данных
- 28. Гетерогенные узлы В зависимости от применения сенсорный узел может играть различную роль в сети или иметь
- 29. Толерантность к отказам Некоторые сенсорные узлы могут выходить из строя или быть заблокированы вследствие недостаточного уровня
- 30. Масштабируемость В зависимости от решаемой задачи число сенсорных узлов в беспроводных сенсорных сетях, размещенных в сенсорном
- 31. Гибкость Алгоритмы в сенсорных сетях должны быть способны адаптироваться к различным приложениям БСС. Условия работы и
- 32. Средства передачи Характеристики окружающей среды также определяют метод радиосвязи для БСС. Например, для подводных беспроводных сенсорных
- 33. Связность Высокая плотность узлов в сенсорных сетях способствует поддержанию необходимого значения связности. Тем не менее, связность
- 34. Покрытие В беспроводных сенсорных сетях каждый сенсорный узел покрывает ограниченную физическую область окружающей среды. Доля покрытия
- 35. Мобильность Большинство приложений предполагает, что сенсорные узлы стационарны. Тем не менее, мобильность сенсорных узлов может быть
- 36. Двумерное и трехмерное пространство Сенсорные сети могут часто развертываться в трехмерном пространстве, например, в многоэтажных зданиях,
- 37. Агрегация данных Сенсорные узлы могут генерировать значительные избыточные данные, включая аналогичные сообщения о событиях от нескольких
- 38. Самоорганизация Сенсорные сети должны иметь возможность самоорганизации. Поэтому, вычислительные возможности, возможности обеспечения связи, возможности управления должны
- 39. Точность и латентность Обеспечение точной информацией в реальном времени – одна из главных задач приложений БСС.
- 40. Типы гетерогенных ресурсов (1) Вычислительная неоднородность Гетерогенный узел имеет более мощный микропроцессор и больше памяти, чем
- 41. Типы гетерогенных ресурсов (2) Неоднородность сетевых возможностей Гетерогенный узел имеет более высокую пропускную способность и более
- 42. Типы гетерогенных ресурсов (3) Неоднородность энергии Для гетерогенного сенсорного узла существует возможность либо постоянного электропитания от
- 43. Кластеризация в БСС
- 44. Раунд в кластеризации
- 45. Кластеризация в одноранговой и многошаговой сетях
- 46. Головной узел кластера (СН) Координация группы узлов, расположенных в границах кластера, агрегация данных от членов кластера
- 47. Базовая станция (BS) или шлюз Учитывая высокие возможности обработки информации и неограниченный источник энергии, БС может
- 48. Ретранслятор RN (Relay node) Транзитные узлы в многошаговых сетях, выполняющие функции передачи собранных или агрегированных данных
- 49. Типовой узел GN (General node) Большинство узлов в сети, которые только обеспечивают сбор данных, основанных на
- 50. АЛГОРИТМЫ ВЫБОРА ГОЛОВНОГО УЗЛА ДЛЯ ГОМОГЕННЫХ СЕТЕЙ
- 51. DT (Direct Transmission)
- 52. DT после 180 временных раундов
- 53. Кластеризация (LEACH)
- 54. Кластеризация (LEACH)
- 55. LEACH (Low-Energy Adaptive Clustering Hierarchy) В фазе формирования кластера каждый сенсорный узел генерирует случайное число от
- 56. Порог для LEACH
- 57. LEACH При выборе головного узла другие сенсорные узлы определяют, к какому кластеру они хотят присоединиться на
- 58. Архитектура сети LEACH
- 59. Недостатки алгоритма LEACH (1) LEACH выполняет только прямую передачу данных внутри кластера и непосредственно из головного
- 60. Недостатки алгоритма LEACH (2) Несмотря на ротацию головных узлов CH в каждом раунде, чтобы добиться балансировки
- 61. Недостатки алгоритма LEACH (3) Так как выборы СН выполняются в терминах вероятностей, трудно равномерно распределить СН
- 62. TEEN (Threshold-sensitive Energy Efficient Protocols Жесткий порог (Hard Threshold): Узел посылает информацию головному узлу только, если
- 63. Архитектура сети для алгоритма TEEN
- 64. Преимущества TEEN (1) Жесткий порог (НТ) сокращает количество сообщений, передавая информацию только тогда, когда собираемые данные
- 65. Преимущества TEEN (2) TEEN оперативно реагирует на большие изменения в собираемых данных, что подходит для реактивных
- 66. АЛГОРИТМЫ ВЫБОРА ГОЛОВНОГО УЗЛА ДЛЯ ГЕТЕРОГЕННЫХ СЕТЕЙ
- 67. SEP (Stable Election Protocol)
- 68. DEEC (Distributed Energy Efficient Clustering) Распределенный энергосберегающий алгоритм кластеризации для гетерогеных беспроводных многоуровневых сенсорных сетей.
- 69. Энергия для DEEC Вероятность выбора головного узла Средняя энергия сети для произвольного раунда r
- 70. Показатели (1) Жизненный цикл Жизненный цикл БСС может быть определен с помощью следующих показателей: – длительность
- 71. Показатели (2) Стабильность Длительность интервала времени от начала функционирования БСС до момента гибели первого сенсорного узла.
- 72. Сравнение алгоритмов В первом сценарии сенсорные узлы случайно распределены на плоскости размером 100м*100м. Число узлов в
- 73. Модель сети
- 74. Период стабильности
- 75. Остаточная энергия
- 76. Число живущих узлов
- 77. Число погибших узлов
- 78. Сравнение для гетерогенных сетей В этом сценарии рассмотрим гетерогенную сенсорную сеть, в которой есть два типа
- 79. Модель гетерогенной сети
- 80. Период стабильности
- 81. Остаточная энергия
- 82. Число живущих узлов
- 83. Число погибших узлов
- 84. Многоуровневая гетерогенная сеть В этом сценарии рассмотрим многоуровневые по возможным энергетическим характеристикам сенсорных узлов гетерогенные сети.
- 85. Период стабильности
- 86. Остаточная энергия
- 87. Мобильные Беспроводные Сенсорные Сети (MWSN).
- 88. Мобильный узел для сбора информации Специальный мобильный узел или узлы участвуют в сборе информации с сенсорных
- 89. Мобильность базовой станции. Мобильная базовая станция может перемещаться между фрагментами сети, что так же, как и
- 90. Мобильность событий В БСС событие, которое должно наблюдаться, также может быть мобильным (например, в задачах поиска
- 91. Мобильность членов кластера и головного узла кластера. Мобильность членов кластера и головного узла кластера, оказывая в
- 92. Модели мобильности случайная мобильность предсказуемая мобильность управляемая мобильность.
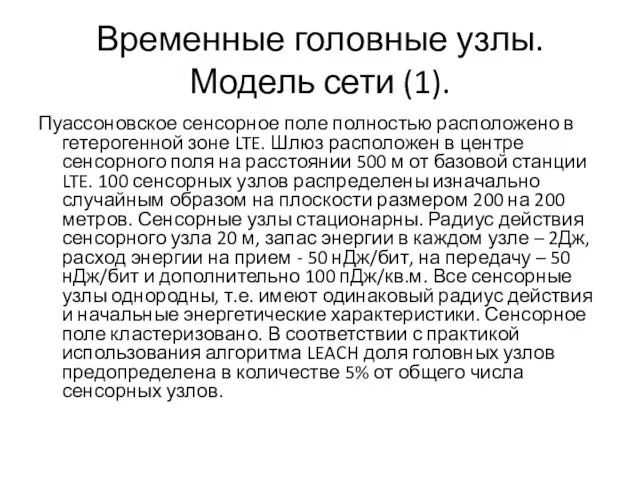
- 93. Временные головные узлы. Модель сети (1). Пуассоновское сенсорное поле полностью расположено в гетерогенной зоне LTE. Шлюз
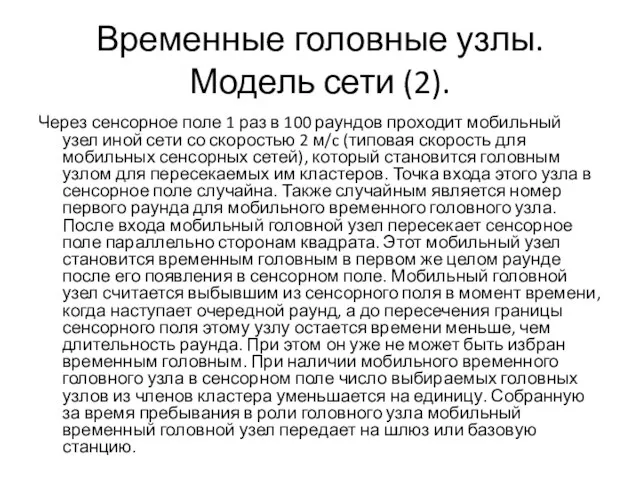
- 94. Временные головные узлы. Модель сети (2). Через сенсорное поле 1 раз в 100 раундов проходит мобильный
- 95. Изменение вероятности доступности временного мобильного головного узла от времени для разных скоростей его перемещения
- 96. Адаптивный алгоритм кластеризации для беспроводных сенсорных сетей с мобильными узлами (МАСА) В этом алгоритме кластеризации мобильный
- 97. Использование предикторов Исследованы три эвристических предиктора: простой точечный предиктор SPP (Single Point Predictor), линейный экстраполяционный предиктор
- 98. Архитектура сети при использовании алгоритма MACA
- 99. Стабильность кластера (1) Поскольку рассматриваемая сенсорная сеть состоит из мобильных узлов, то в фазе стационарного состояния
- 100. Стабильность кластера (2) Кроме того, головной узел кластера и БСУ имеют информацию о примерном времени передачи
- 101. Отказоустойчивый алгоритм кластеризации для БСС FT-TEEN Фаза формирования кластера Фаза передачи данных Обнаружение ошибки Процесс восстановления
- 102. Архитектура сети при использовании алгоритма FC-TEEN
- 103. Число успешно переданных пакетов от членов кластера на CH (Вероятность ошибки 10%)
- 104. Число успешно переданных пакетов от CH на базовую станцию каждый раунд (Вероятность ошибки 10%)
- 105. Число успешно переданных пакетов от членов кластера на CH
- 106. Алгоритмы выбора головного узла для трехмерного пространства П.Абакумов. Алгоритм MCA. Электросвязь №4, 2014. ICACT’2014.
- 107. Сравнение алгоритмов (1)
- 109. Скачать презентацию

Сенсоры
21 ideas for the 21st century
(Business Week, August 30, 1999).
Беспроводные сенсорные
Сенсоры
21 ideas for the 21st century
(Business Week, August 30, 1999).
Беспроводные сенсорные
История развития направления
u-Korea, февраль 2005 года ICACT’2005
u-Россия, 21 апреля 2005 года,
История развития направления
u-Korea, февраль 2005 года ICACT’2005
u-Россия, 21 апреля 2005 года,

Всепроникающие сенсорные сети
Всепроникающие сенсорные сети
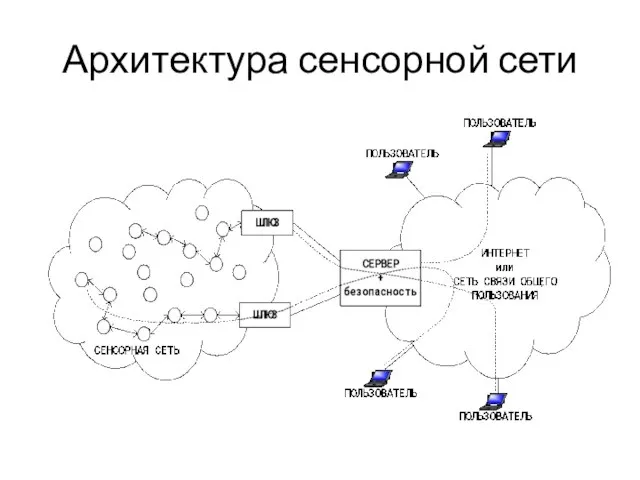
Архитектура сенсорной сети
Архитектура сенсорной сети
Особенности сенсорных сетей
Очень большое число узлов сети (больше 64000 в одной
Особенности сенсорных сетей
Очень большое число узлов сети (больше 64000 в одной
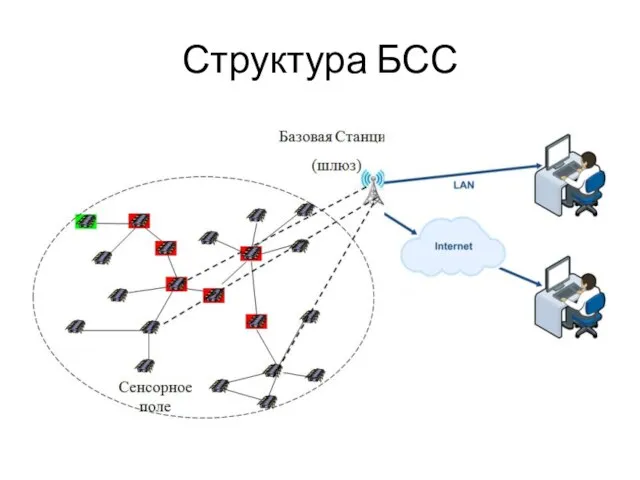
Структура БСС
Структура БСС

Примеры сенсорных узлов
Размеры
Внешний вид с антенной
Примеры сенсорных узлов
Размеры
Внешний вид с антенной

Структура сенсорного узла
Структура сенсорного узла
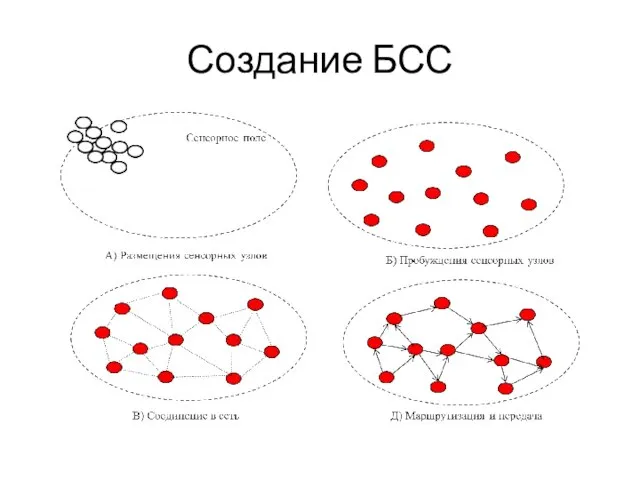
Создание БСС
Создание БСС
Проактивные и Реактивные БСС
На основе способа функционирования и целевого применения
Проактивные и Реактивные БСС
На основе способа функционирования и целевого применения
Гомогенные и Гетерогенные БСС
Сенсорные сети могут быть разделены на два основных
Гомогенные и Гетерогенные БСС
Сенсорные сети могут быть разделены на два основных
Одноранговые и Иерархические сети
БСС могут быть классифицированы в зависимости от
Одноранговые и Иерархические сети
БСС могут быть классифицированы в зависимости от
Одноранговые и Иерархические сети
Одноранговые и Иерархические сети
Случайное и детерминированное размещение сенсорных узлов
БСС могут быть классифицированы в зависимости
Случайное и детерминированное размещение сенсорных узлов
БСС могут быть классифицированы в зависимости
Статичность и Мобильность
Потребность в мониторинге людей, животных и вещей в целом
Статичность и Мобильность
Потребность в мониторинге людей, животных и вещей в целом
Двумерные и трехмерные беспроводные сенсорные сети
БСС могут быть также классифицированы на
Двумерные и трехмерные беспроводные сенсорные сети
БСС могут быть также классифицированы на
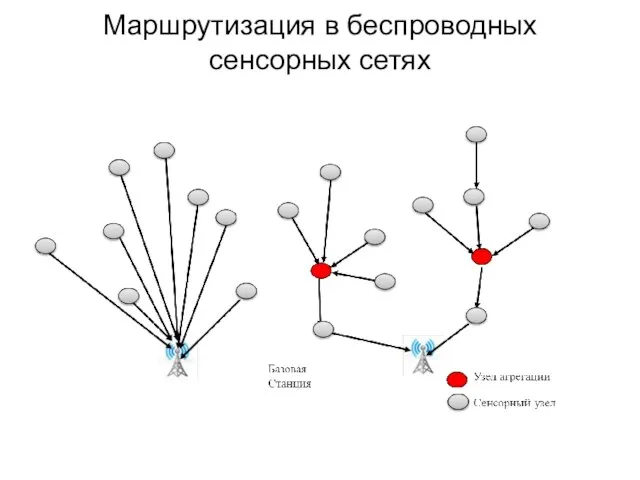
Маршрутизация в беспроводных сенсорных сетях
Маршрутизация в беспроводных сенсорных сетях

Особенности маршрутизации в БСС (1)
Традиционная адресация на основе IP-протоколов не может
Особенности маршрутизации в БСС (1)
Традиционная адресация на основе IP-протоколов не может
Особенности маршрутизации в БСС (2)
Ресурсы сенсорных узлов в беспроводных сенсорных сетях
Особенности маршрутизации в БСС (2)
Ресурсы сенсорных узлов в беспроводных сенсорных сетях
Особенности маршрутизации в БСС (3)
Сенсорные узлы как очень простые элементы
Особенности маршрутизации в БСС (3)
Сенсорные узлы как очень простые элементы
Особенности маршрутизации в БСС (4)
Некоторые узлы в сети осуществляют одни и
Особенности маршрутизации в БСС (4)
Некоторые узлы в сети осуществляют одни и
Протоколы USN
1. ZigBee.
2. 6LoWPAN (IPv6 Low energy protocol for
Протоколы USN
1. ZigBee.
2. 6LoWPAN (IPv6 Low energy protocol for
Алгоритмы выбора головного узла
Алгоритмы выбора головного узла
Потребление энергии (Энергетическая эффективность)
Идеальный алгоритм должен обеспечить своевременную передачу информации с
Потребление энергии (Энергетическая эффективность)
Идеальный алгоритм должен обеспечить своевременную передачу информации с
Модель передачи данных
Сбор и передача данных в БСС зависят от приложения
Модель передачи данных
Сбор и передача данных в БСС зависят от приложения
Гетерогенные узлы
В зависимости от применения сенсорный узел может играть различную роль
Гетерогенные узлы
В зависимости от применения сенсорный узел может играть различную роль
Толерантность к отказам
Некоторые сенсорные узлы могут выходить из строя или
Толерантность к отказам
Некоторые сенсорные узлы могут выходить из строя или
Масштабируемость
В зависимости от решаемой задачи число сенсорных узлов в беспроводных сенсорных
Масштабируемость
В зависимости от решаемой задачи число сенсорных узлов в беспроводных сенсорных
Гибкость
Алгоритмы в сенсорных сетях должны быть способны адаптироваться к различным приложениям
Гибкость
Алгоритмы в сенсорных сетях должны быть способны адаптироваться к различным приложениям
Средства передачи
Характеристики окружающей среды также определяют метод радиосвязи для БСС. Например,
Средства передачи
Характеристики окружающей среды также определяют метод радиосвязи для БСС. Например,
Связность
Высокая плотность узлов в сенсорных сетях способствует поддержанию необходимого значения связности.
Связность
Высокая плотность узлов в сенсорных сетях способствует поддержанию необходимого значения связности.
Покрытие
В беспроводных сенсорных сетях каждый сенсорный узел покрывает ограниченную физическую область
Покрытие
В беспроводных сенсорных сетях каждый сенсорный узел покрывает ограниченную физическую область
Мобильность
Большинство приложений предполагает, что сенсорные узлы стационарны. Тем не менее, мобильность
Мобильность
Большинство приложений предполагает, что сенсорные узлы стационарны. Тем не менее, мобильность
Двумерное и трехмерное пространство
Сенсорные сети могут часто развертываться в трехмерном пространстве,
Двумерное и трехмерное пространство
Сенсорные сети могут часто развертываться в трехмерном пространстве,
Агрегация данных
Сенсорные узлы могут генерировать значительные избыточные данные, включая аналогичные сообщения
Агрегация данных
Сенсорные узлы могут генерировать значительные избыточные данные, включая аналогичные сообщения
Самоорганизация
Сенсорные сети должны иметь возможность самоорганизации. Поэтому, вычислительные возможности, возможности обеспечения
Самоорганизация
Сенсорные сети должны иметь возможность самоорганизации. Поэтому, вычислительные возможности, возможности обеспечения
Точность и латентность
Обеспечение точной информацией в реальном времени – одна из
Точность и латентность
Обеспечение точной информацией в реальном времени – одна из
Типы гетерогенных ресурсов (1)
Вычислительная неоднородность
Гетерогенный узел имеет более мощный
Типы гетерогенных ресурсов (1)
Вычислительная неоднородность
Гетерогенный узел имеет более мощный
Типы гетерогенных ресурсов (2)
Неоднородность сетевых возможностей
Гетерогенный узел имеет более
Типы гетерогенных ресурсов (2)
Неоднородность сетевых возможностей
Гетерогенный узел имеет более
Типы гетерогенных ресурсов (3)
Неоднородность энергии
Для гетерогенного сенсорного узла существует
Типы гетерогенных ресурсов (3)
Неоднородность энергии
Для гетерогенного сенсорного узла существует
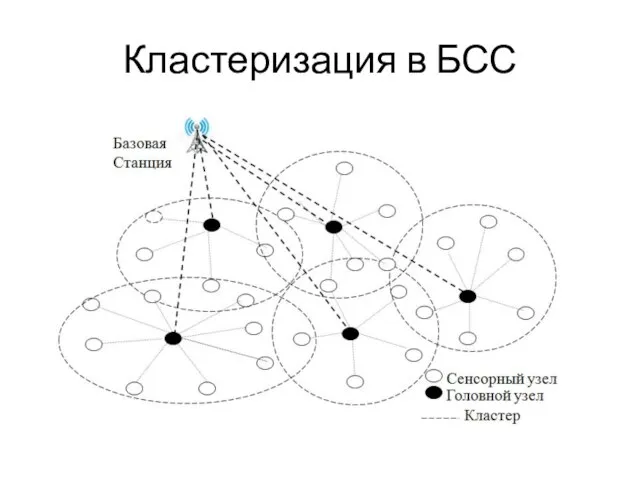
Кластеризация в БСС
Кластеризация в БСС

Раунд в кластеризации
Раунд в кластеризации
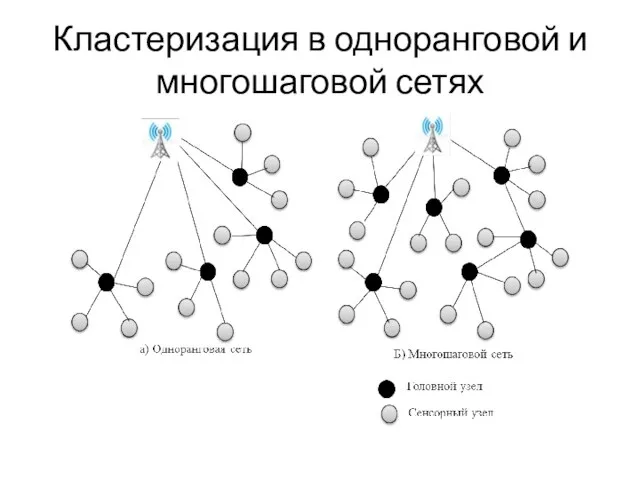
Кластеризация в одноранговой и многошаговой сетях
Кластеризация в одноранговой и многошаговой сетях
Головной узел кластера (СН)
Координация группы узлов, расположенных в границах кластера, агрегация
Головной узел кластера (СН)
Координация группы узлов, расположенных в границах кластера, агрегация
Базовая станция (BS) или шлюз
Учитывая высокие возможности обработки информации и неограниченный
Базовая станция (BS) или шлюз
Учитывая высокие возможности обработки информации и неограниченный
Ретранслятор RN (Relay node)
Транзитные узлы в многошаговых сетях, выполняющие функции передачи
Ретранслятор RN (Relay node)
Транзитные узлы в многошаговых сетях, выполняющие функции передачи
Типовой узел GN (General node)
Большинство узлов в сети, которые только обеспечивают
Типовой узел GN (General node)
Большинство узлов в сети, которые только обеспечивают
АЛГОРИТМЫ ВЫБОРА ГОЛОВНОГО УЗЛА ДЛЯ ГОМОГЕННЫХ СЕТЕЙ
АЛГОРИТМЫ ВЫБОРА ГОЛОВНОГО УЗЛА ДЛЯ ГОМОГЕННЫХ СЕТЕЙ
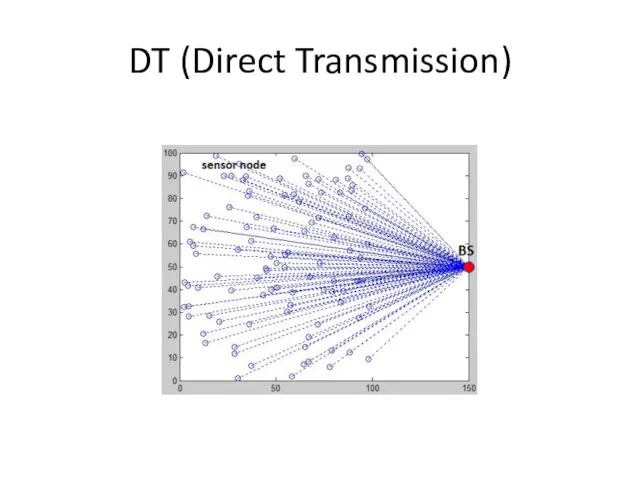
DT (Direct Transmission)
DT (Direct Transmission)

DT после 180 временных раундов
DT после 180 временных раундов
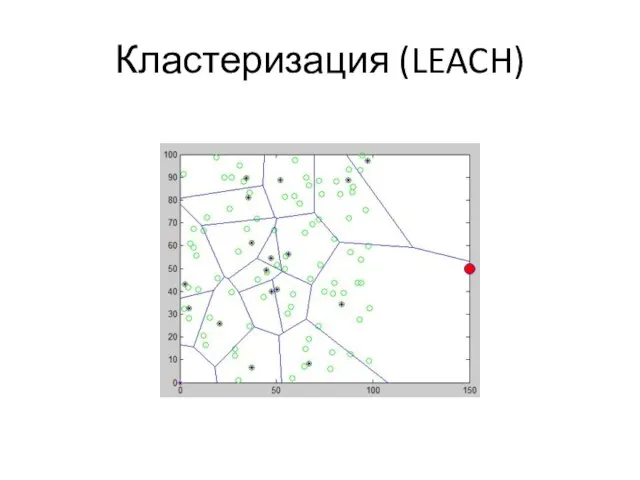
Кластеризация (LEACH)
Кластеризация (LEACH)

Кластеризация (LEACH)
Кластеризация (LEACH)
LEACH (Low-Energy Adaptive Clustering Hierarchy)
В фазе формирования кластера каждый сенсорный узел
LEACH (Low-Energy Adaptive Clustering Hierarchy)
В фазе формирования кластера каждый сенсорный узел
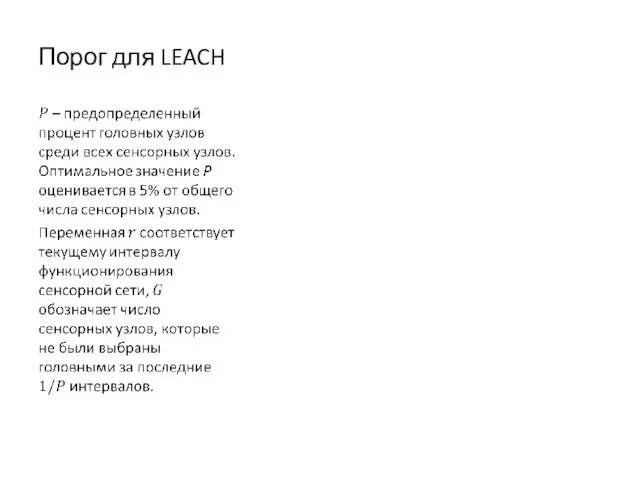
Порог для LEACH
Порог для LEACH
LEACH
При выборе головного узла другие сенсорные узлы определяют, к какому кластеру
LEACH
При выборе головного узла другие сенсорные узлы определяют, к какому кластеру

Архитектура сети LEACH
Архитектура сети LEACH
Недостатки алгоритма LEACH (1)
LEACH выполняет только прямую передачу данных внутри
Недостатки алгоритма LEACH (1)
LEACH выполняет только прямую передачу данных внутри
Недостатки алгоритма LEACH (2)
Несмотря на ротацию головных узлов CH в
Недостатки алгоритма LEACH (2)
Несмотря на ротацию головных узлов CH в
Недостатки алгоритма LEACH (3)
Так как выборы СН выполняются в терминах
Недостатки алгоритма LEACH (3)
Так как выборы СН выполняются в терминах
TEEN (Threshold-sensitive Energy Efficient Protocols
Жесткий порог (Hard Threshold): Узел посылает информацию
TEEN (Threshold-sensitive Energy Efficient Protocols
Жесткий порог (Hard Threshold): Узел посылает информацию
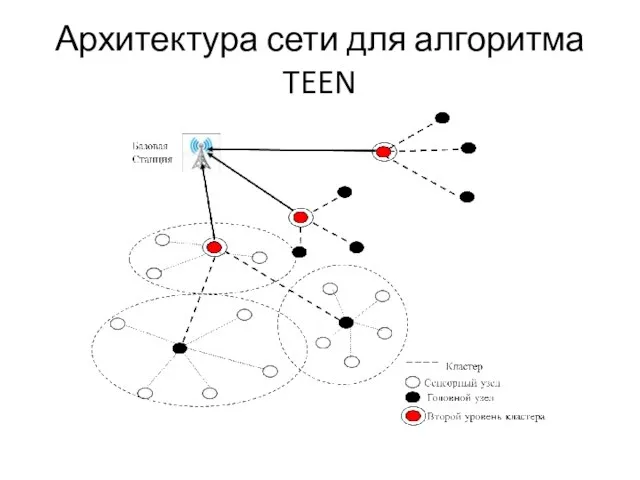
Архитектура сети для алгоритма TEEN
Архитектура сети для алгоритма TEEN
Преимущества TEEN (1)
Жесткий порог (НТ) сокращает количество сообщений, передавая информацию только
Преимущества TEEN (1)
Жесткий порог (НТ) сокращает количество сообщений, передавая информацию только
Преимущества TEEN (2)
TEEN оперативно реагирует на большие изменения в собираемых данных,
Преимущества TEEN (2)
TEEN оперативно реагирует на большие изменения в собираемых данных,
АЛГОРИТМЫ ВЫБОРА ГОЛОВНОГО УЗЛА ДЛЯ ГЕТЕРОГЕННЫХ СЕТЕЙ
АЛГОРИТМЫ ВЫБОРА ГОЛОВНОГО УЗЛА ДЛЯ ГЕТЕРОГЕННЫХ СЕТЕЙ
SEP (Stable Election Protocol)
SEP (Stable Election Protocol)
DEEC (Distributed Energy Efficient Clustering)
Распределенный энергосберегающий алгоритм кластеризации для гетерогеных беспроводных
DEEC (Distributed Energy Efficient Clustering)
Распределенный энергосберегающий алгоритм кластеризации для гетерогеных беспроводных
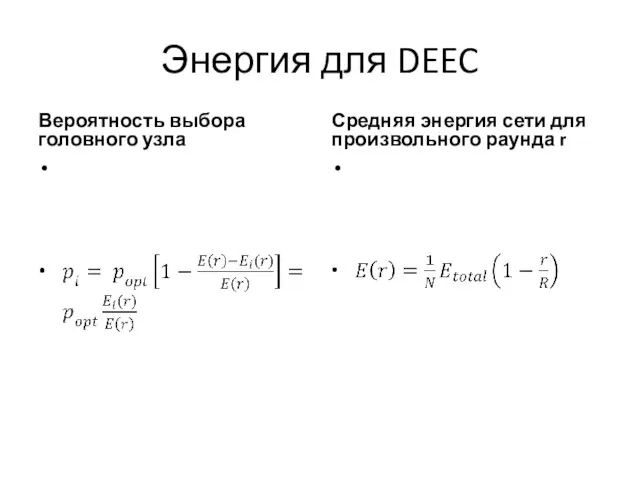
Энергия для DEEC
Вероятность выбора головного узла
Средняя энергия сети для произвольного раунда
Энергия для DEEC
Вероятность выбора головного узла
Средняя энергия сети для произвольного раунда
Показатели (1)
Жизненный цикл
Жизненный цикл БСС может быть определен с помощью
Показатели (1)
Жизненный цикл
Жизненный цикл БСС может быть определен с помощью
Показатели (2)
Стабильность
Длительность интервала времени от начала функционирования БСС до момента
Показатели (2)
Стабильность
Длительность интервала времени от начала функционирования БСС до момента
Сравнение алгоритмов
В первом сценарии сенсорные узлы случайно распределены на плоскости размером
Сравнение алгоритмов
В первом сценарии сенсорные узлы случайно распределены на плоскости размером
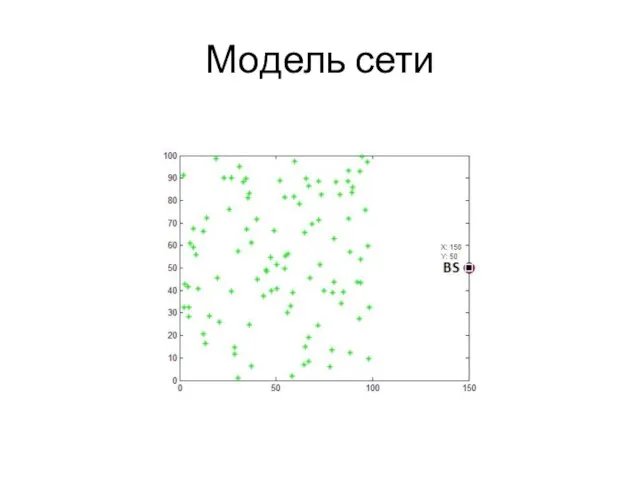
Модель сети
Модель сети
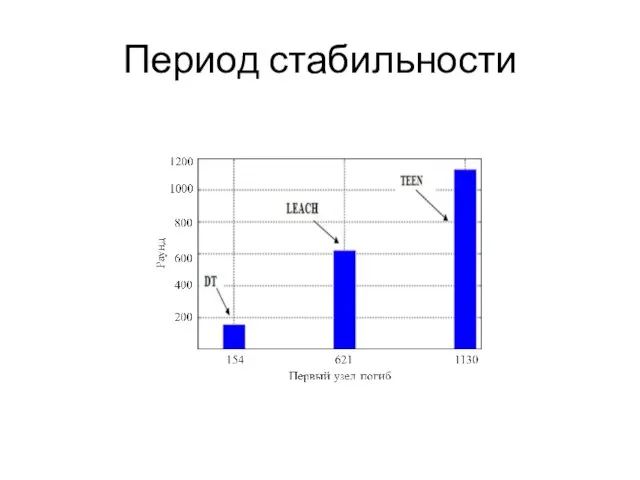
Период стабильности
Период стабильности
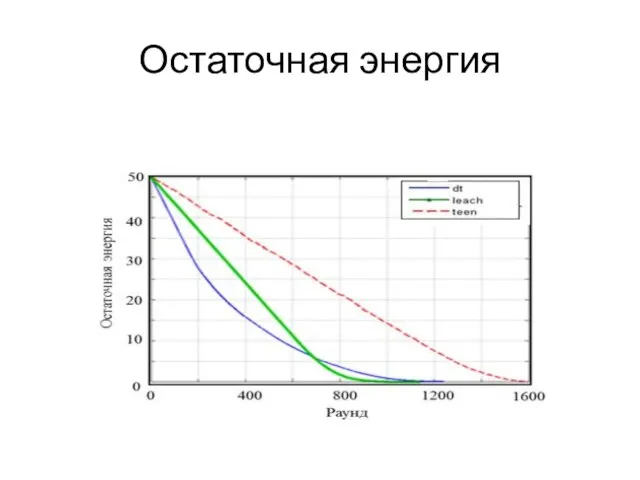
Остаточная энергия
Остаточная энергия
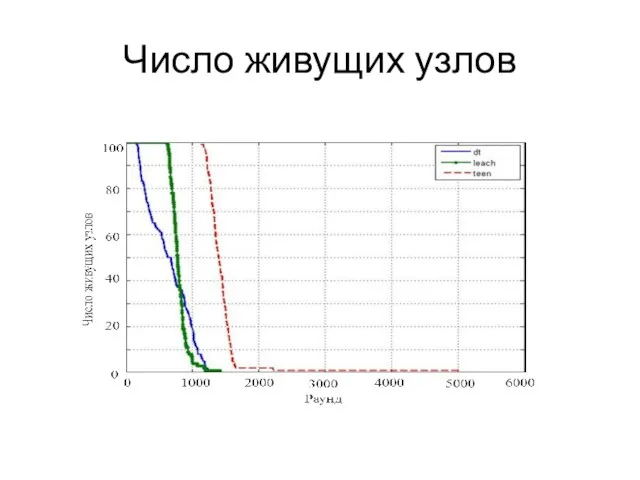
Число живущих узлов
Число живущих узлов
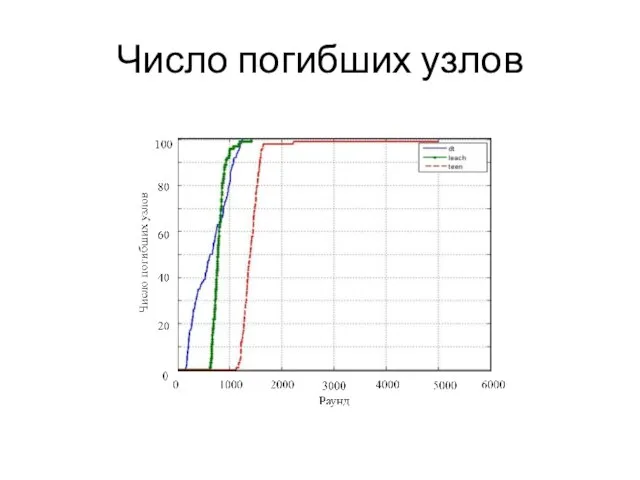
Число погибших узлов
Число погибших узлов
Сравнение для гетерогенных сетей
В этом сценарии рассмотрим гетерогенную сенсорную сеть, в
Сравнение для гетерогенных сетей
В этом сценарии рассмотрим гетерогенную сенсорную сеть, в
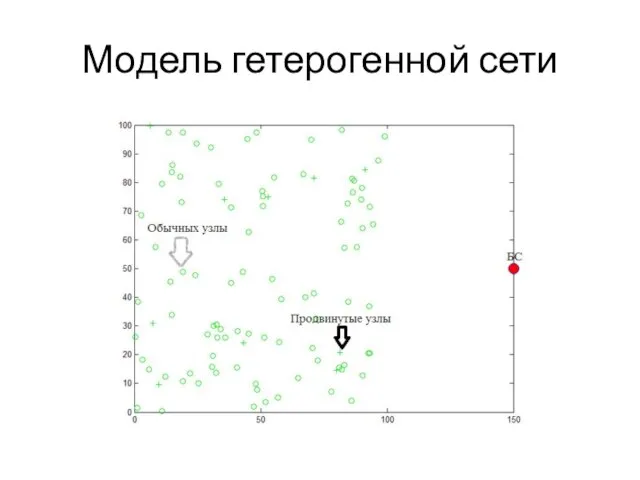
Модель гетерогенной сети
Модель гетерогенной сети
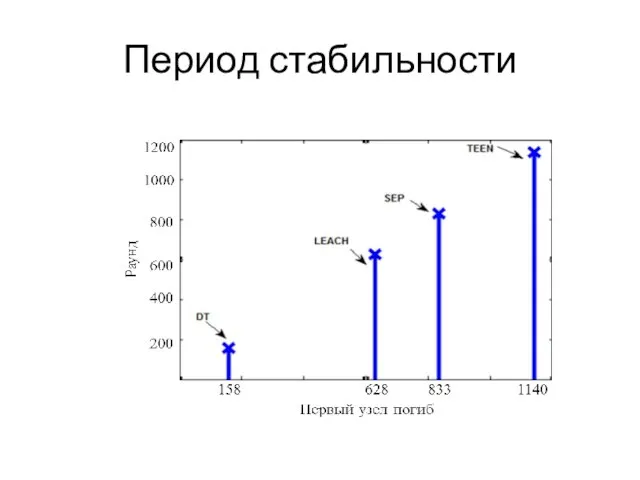
Период стабильности
Период стабильности

Остаточная энергия
Остаточная энергия
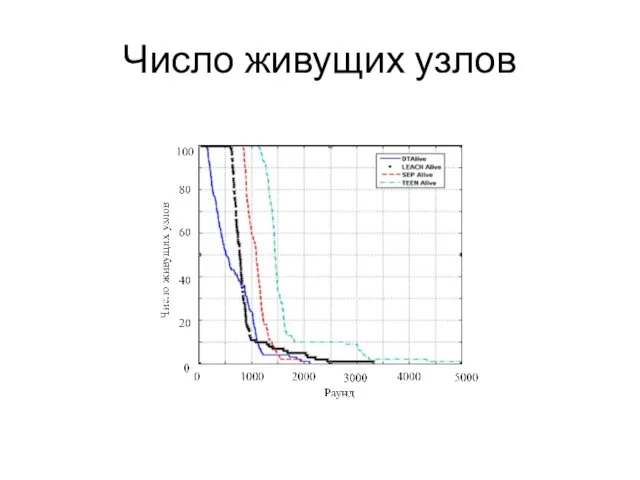
Число живущих узлов
Число живущих узлов
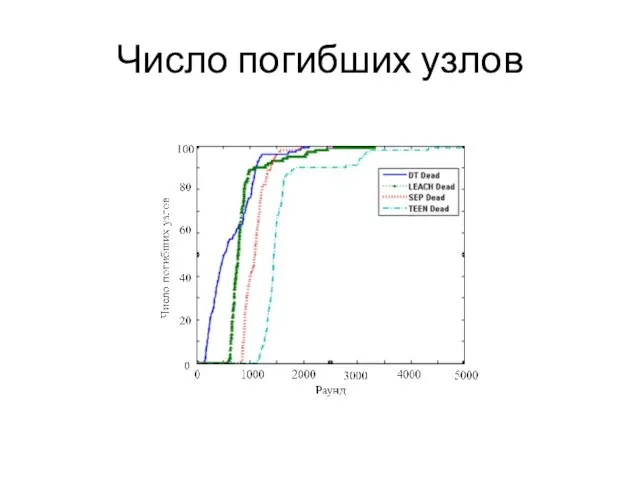
Число погибших узлов
Число погибших узлов
Многоуровневая гетерогенная сеть
В этом сценарии рассмотрим многоуровневые по возможным энергетическим характеристикам
Многоуровневая гетерогенная сеть
В этом сценарии рассмотрим многоуровневые по возможным энергетическим характеристикам
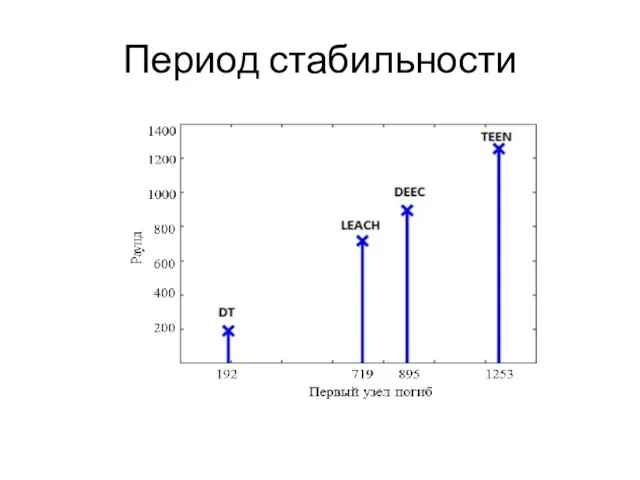
Период стабильности
Период стабильности
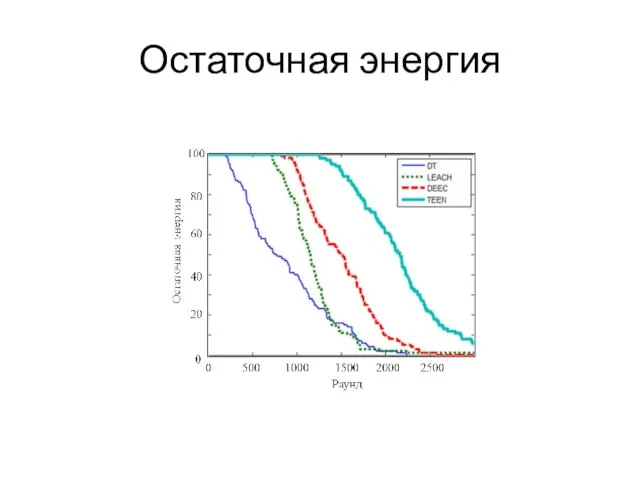
Остаточная энергия
Остаточная энергия
Мобильные Беспроводные Сенсорные Сети (MWSN).
Мобильные Беспроводные Сенсорные Сети (MWSN).
Мобильный узел для сбора информации
Специальный мобильный узел или узлы участвуют в
Мобильный узел для сбора информации
Специальный мобильный узел или узлы участвуют в
Мобильность базовой станции.
Мобильная базовая станция может перемещаться между фрагментами сети,
Мобильность базовой станции.
Мобильная базовая станция может перемещаться между фрагментами сети,

Мобильность событий
В БСС событие, которое должно наблюдаться, также может быть мобильным
Мобильность событий
В БСС событие, которое должно наблюдаться, также может быть мобильным
Мобильность членов кластера и головного узла кластера.
Мобильность членов кластера и
Мобильность членов кластера и головного узла кластера.
Мобильность членов кластера и
Модели мобильности
случайная мобильность
предсказуемая мобильность
управляемая мобильность.
Модели мобильности
случайная мобильность
предсказуемая мобильность
управляемая мобильность.
Временные головные узлы. Модель сети (1).
Пуассоновское сенсорное поле полностью расположено в
Временные головные узлы. Модель сети (1).
Пуассоновское сенсорное поле полностью расположено в
Временные головные узлы. Модель сети (2).
Через сенсорное поле 1 раз в
Временные головные узлы. Модель сети (2).
Через сенсорное поле 1 раз в
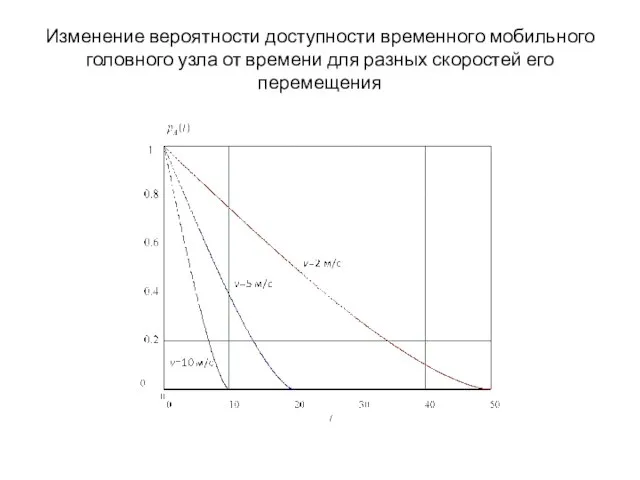
Изменение вероятности доступности временного мобильного головного узла от времени для разных
Изменение вероятности доступности временного мобильного головного узла от времени для разных
Адаптивный алгоритм кластеризации для беспроводных сенсорных сетей с мобильными узлами (МАСА)
В
Адаптивный алгоритм кластеризации для беспроводных сенсорных сетей с мобильными узлами (МАСА)
В

Использование предикторов
Исследованы три эвристических предиктора: простой точечный предиктор SPP (Single Point
Использование предикторов
Исследованы три эвристических предиктора: простой точечный предиктор SPP (Single Point
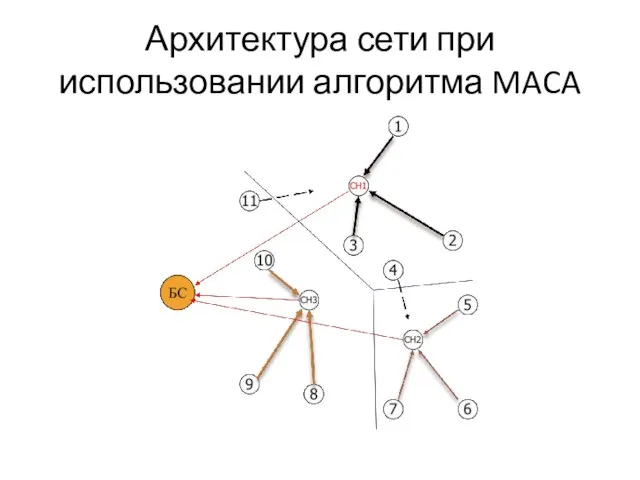
Архитектура сети при использовании алгоритма MACA
Архитектура сети при использовании алгоритма MACA
Стабильность кластера (1)
Поскольку рассматриваемая сенсорная сеть состоит из мобильных узлов, то
Стабильность кластера (1)
Поскольку рассматриваемая сенсорная сеть состоит из мобильных узлов, то
Стабильность кластера (2)
Кроме того, головной узел кластера и БСУ имеют информацию
Стабильность кластера (2)
Кроме того, головной узел кластера и БСУ имеют информацию
Отказоустойчивый алгоритм кластеризации для БСС FT-TEEN
Фаза формирования кластера
Фаза передачи данных
Обнаружение
Отказоустойчивый алгоритм кластеризации для БСС FT-TEEN
Фаза формирования кластера
Фаза передачи данных
Обнаружение
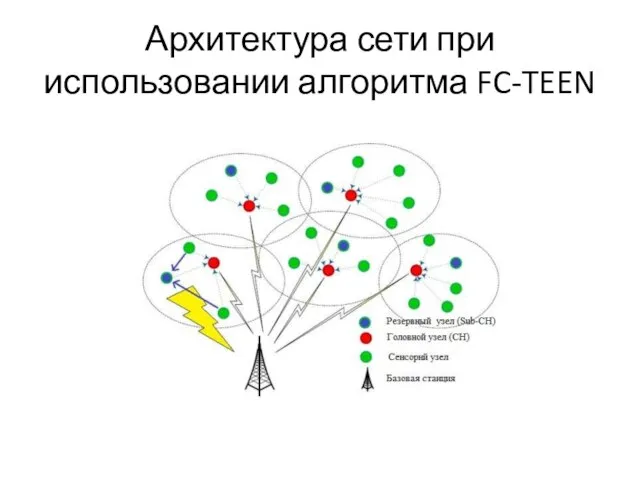
Архитектура сети при использовании алгоритма FC-TEEN
Архитектура сети при использовании алгоритма FC-TEEN
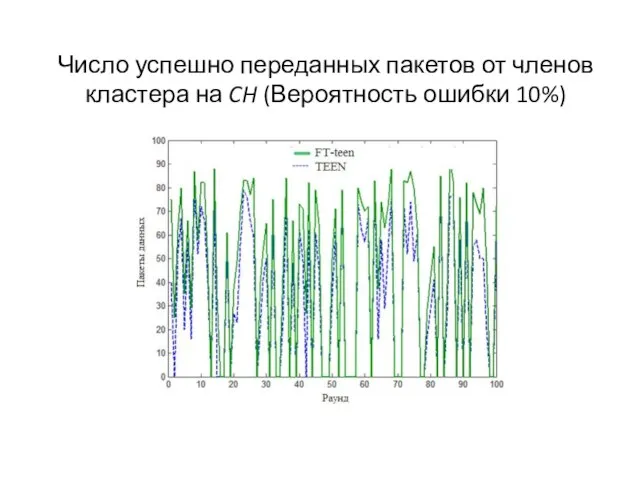
Число успешно переданных пакетов от членов кластера на CH (Вероятность ошибки
Число успешно переданных пакетов от членов кластера на CH (Вероятность ошибки
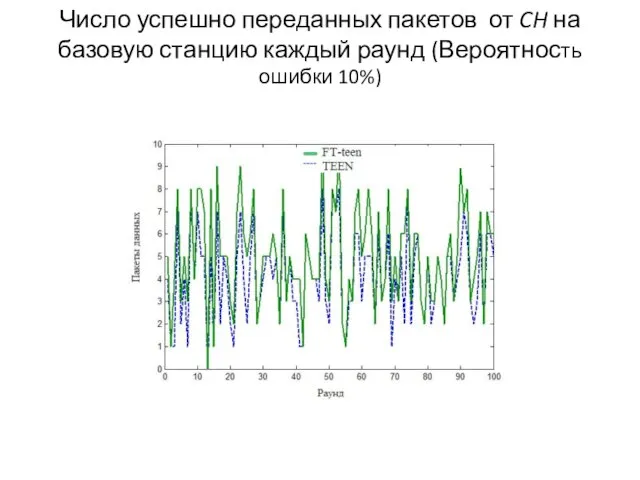
Число успешно переданных пакетов от CH на базовую станцию каждый раунд
Число успешно переданных пакетов от CH на базовую станцию каждый раунд
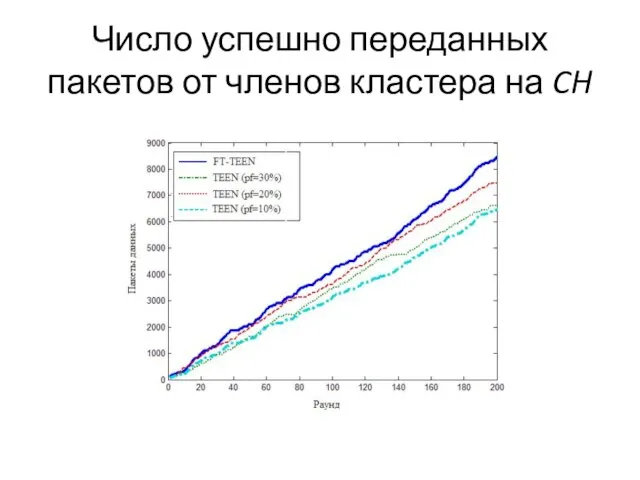
Число успешно переданных пакетов от членов кластера на CH
Число успешно переданных пакетов от членов кластера на CH
Алгоритмы выбора головного узла для трехмерного пространства
П.Абакумов. Алгоритм MCA. Электросвязь №4,
Алгоритмы выбора головного узла для трехмерного пространства
П.Абакумов. Алгоритм MCA. Электросвязь №4,
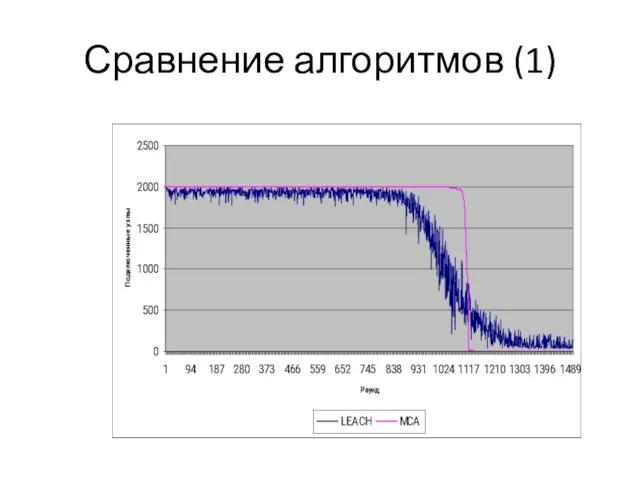
Сравнение алгоритмов (1)
Сравнение алгоритмов (1)
 Сервисы сети Интернет
Сервисы сети Интернет Презентация "Досвід" - скачать презентации по Информатике
Презентация "Досвід" - скачать презентации по Информатике HTML
HTML ГРАФИКИ И ДИАГРАММЫ
ГРАФИКИ И ДИАГРАММЫ  Интернет
Интернет Аббревиатуры в интернете
Аббревиатуры в интернете Составление запросов для поисковых систем с использованием логических выражений
Составление запросов для поисковых систем с использованием логических выражений Функциональная схема компьютера
Функциональная схема компьютера Работа в системе: Партнер - Онлайн Оценка
Работа в системе: Партнер - Онлайн Оценка Файловый сервер Samba
Файловый сервер Samba Проект поэтажной навигации НТГИК в технологии VENUE
Проект поэтажной навигации НТГИК в технологии VENUE Презентация "«Состав персонального компьютера»" - скачать презентации по Информатике
Презентация "«Состав персонального компьютера»" - скачать презентации по Информатике Основные принципы защиты информации в компьютерных системах. Антонова И.М. гр. И-411
Основные принципы защиты информации в компьютерных системах. Антонова И.М. гр. И-411  Коммуникационные технологии
Коммуникационные технологии Интерфейсы
Интерфейсы Лабароторная работа 3
Лабароторная работа 3 lektsia_1
lektsia_1 Решение заданий на позиционные системы счисления Подготовка к ЕГЭ Задания В8
Решение заданий на позиционные системы счисления Подготовка к ЕГЭ Задания В8 Безопасность школьников в сети интернета
Безопасность школьников в сети интернета Влияние социальных сетей и интернета на речь молодежи
Влияние социальных сетей и интернета на речь молодежи Укрощение электрона История развития мониторов
Укрощение электрона История развития мониторов Редактирование и корректура документов
Редактирование и корректура документов Системы счисления. (Лекция 3)
Системы счисления. (Лекция 3) Системы конструкторского и технологического проектирования (лекция 3)
Системы конструкторского и технологического проектирования (лекция 3) Локальные и глобальные сети ЭВМ
Локальные и глобальные сети ЭВМ Презентация "Этапы разработки и исследования моделей на компьютере" - скачать презентации по Информатике
Презентация "Этапы разработки и исследования моделей на компьютере" - скачать презентации по Информатике Презентация "КОМПЬЮТЕРНАЯ ГРАФИКА" - скачать презентации по Информатике
Презентация "КОМПЬЮТЕРНАЯ ГРАФИКА" - скачать презентации по Информатике Что такое алгоритм. Жизненные задачи
Что такое алгоритм. Жизненные задачи