- Геоинформационные технологии в системах территориального управления

Содержание
- 2. МЕТОДЫ ТЕМАТИЧЕСКОГО ДЕШИФРИРОВАНИЯ
- 3. СХЕМА ИНФОРМАЦИОННЫХ ПОТОКОВ в АСУРТ
- 4. ТЕХНОЛОГИЧЕСКАЯ СХЕМА КОСМИЧЕСКОГО МОНИТОРИНГА
- 5. Данные ДЗЗ являются косвенными наблюдениями, так как регистрируются не значения свойств реальных объектов, а интенсивность собственного
- 6. ТЕХНОЛОГИЧЕСКАЯ СХЕМА ОБРАБОТКИ ДАННЫХ ДЗЗ В СИСТЕМАХ КОСМИЧЕСКОГО МОНИТОРИНГА Чтобы перейти от яркостных характеристик пикселей изображения
- 7. ТЕХНОЛОГИЧЕСКАЯ СХЕМА ПРЕДВАРИТЕЛЬНОЙ ОБРАБОТКИ ДАННЫХ ДЗЗ
- 8. ПРЕДОБРАБОТКА Радиометрическая калибровка аппаратных погрешностей Геометрическая коррекция изображений с учетом суточного вращения и кривизны Земли, перемещения
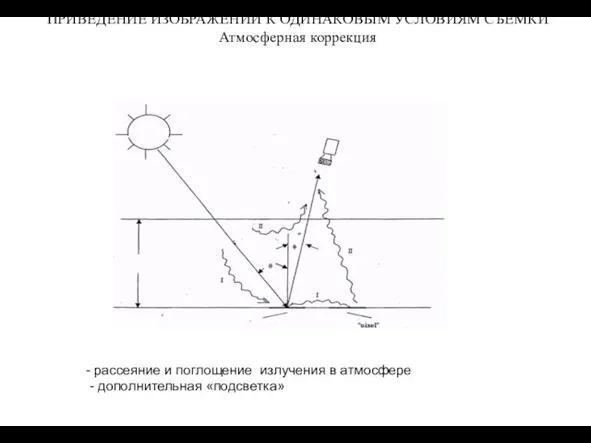
- 9. ПРИВЕДЕНИЕ ИЗОБРАЖЕНИЙ К ОДИНАКОВЫМ УСЛОВИЯМ СЪЕМКИ Атмосферная коррекция - рассеяние и поглощение излучения в атмосфере -
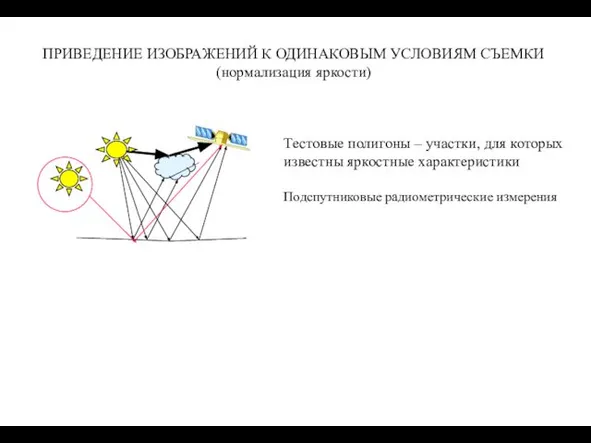
- 10. ПРИВЕДЕНИЕ ИЗОБРАЖЕНИЙ К ОДИНАКОВЫМ УСЛОВИЯМ СЪЕМКИ (нормализация яркости) Тестовые полигоны – участки, для которых известны яркостные
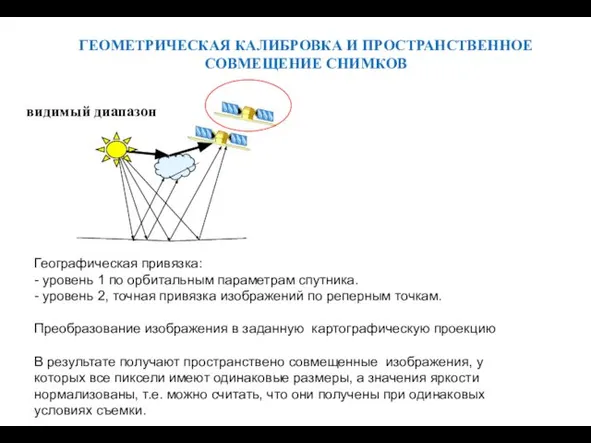
- 11. ГЕОМЕТРИЧЕСКАЯ КАЛИБРОВКА И ПРОСТРАНСТВЕННОЕ СОВМЕЩЕНИЕ СНИМКОВ видимый диапазон Географическая привязка: - уровень 1 по орбитальным параметрам
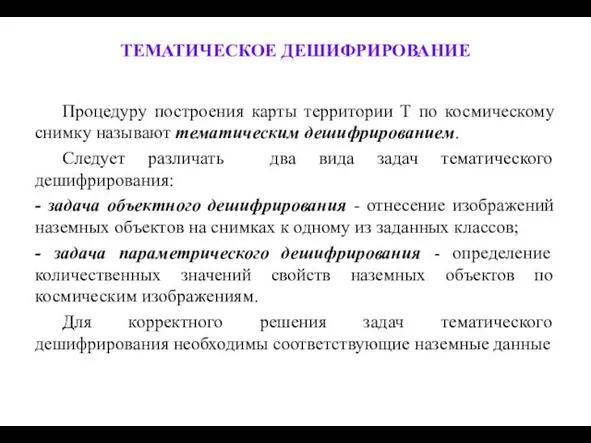
- 12. ТЕМАТИЧЕСКОЕ ДЕШИФРИРОВАНИЕ Процедуру построения карты территории Т по космическому снимку называют тематическим дешифрированием. Следует различать два
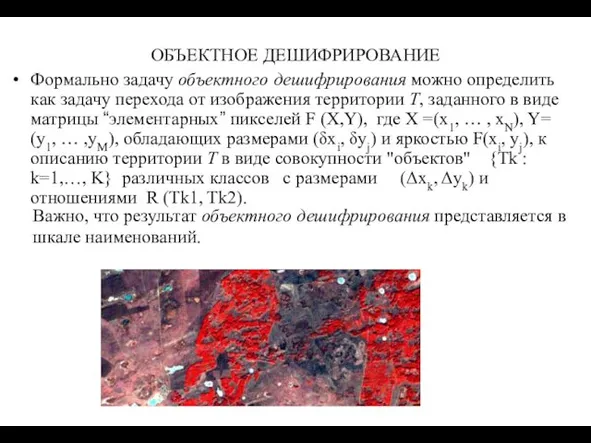
- 13. ОБЪЕКТНОЕ ДЕШИФРИРОВАНИЕ Формально задачу объектного дешифрирования можно определить как задачу перехода от изображения территории Т, заданного
- 14. Для корректного решения задачи объектного дешифрирования необходимо предварительно построить классификатор объектов подстилающей поверхности и их «спектральные
- 15. В результате объектного тематического дешифрирования формируется объектная карта территории (ОКТ ) А - исходный космический снимок
- 16. Возможны два варианта постановки этой задачи: - вариант «объект – пиксель», когда размеры пикселя изображения соответствуют
- 17. Постановка задачи объектного дешифрирования предполагает, что в пределах территории Т, выбраны типичные участки, так называемые, тестовые
- 18. РЕШЕНИЕ ЗАДАЧИ ОБЪЕКТНОГО ДЕШИФРИРОВАНИЯ : 1. Обучение 2. Тестирование (Экзамен) Экстраполирование
- 19. ОБУЧЕНИЕ Обучение предусматривает определение критериев и правил распознавания объектов по их изображениям с использованием наземных наблюдений
- 20. Сложность решения задачи объектного дешифрирования определяется сложностью построения решающих правил, которая в свою очередь зависит от
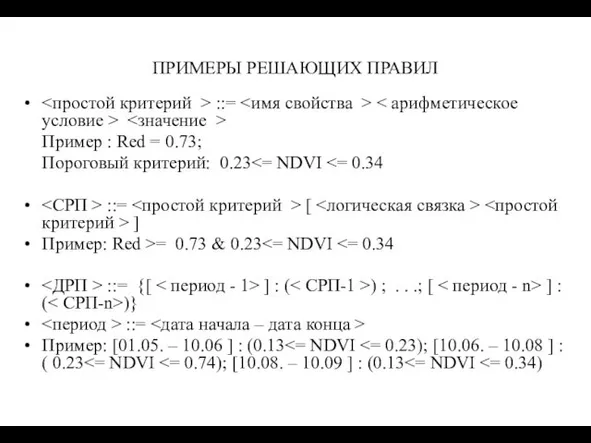
- 21. ПРИМЕРЫ РЕШАЮЩИХ ПРАВИЛ ::= Пример : Red = 0.73; Пороговый критерий: 0.23 ::= [ ] Пример:
- 22. Объектное дешифрирование без обучения На практике при объектном дешифрировании космических снимков часто прибегают к процедуре распознавания
- 23. В настоящее время большое число алгоритмов классификации и распознавания образов, включая и нейросетевые, встроены в стандартные
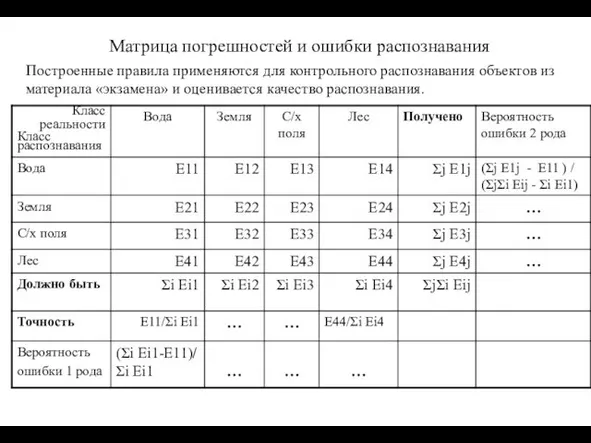
- 24. Матрица погрешностей и ошибки распознавания Построенные правила применяются для контрольного распознавания объектов из материала «экзамена» и
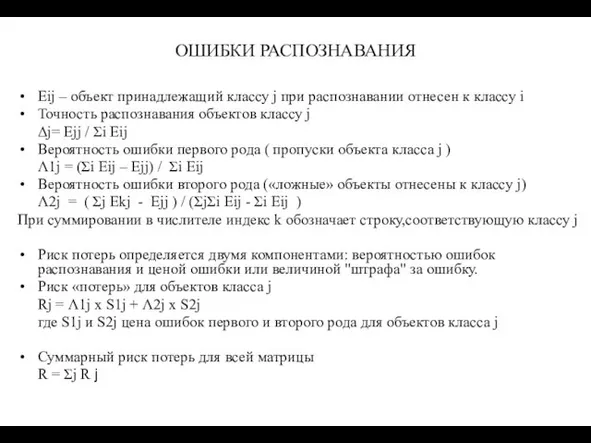
- 25. ОШИБКИ РАСПОЗНАВАНИЯ Еij – объект принадлежащий классу j при распознавании отнесен к классу i Точность распознавания
- 26. Пример матрицы погрешностей и ошибки распознавания
- 27. ОЦЕНКА КАЧЕСТВА РАСПОЗНАВАНИЯ «Обучения» продолжается до тех пор, пока на «экзамене» не будут минимизированы вероятности ошибок
- 28. ЭКСТРАПОЛИРОВАНИЕ. Правила, построенные для объектов тестовых полигонов, применяются для распознавания и картирования объектов на остальной территории
- 29. Параметрическое дешифрирование - перехода от изображения территории Т, заданного в виде “элементарных” пикселей F (X,Y), где
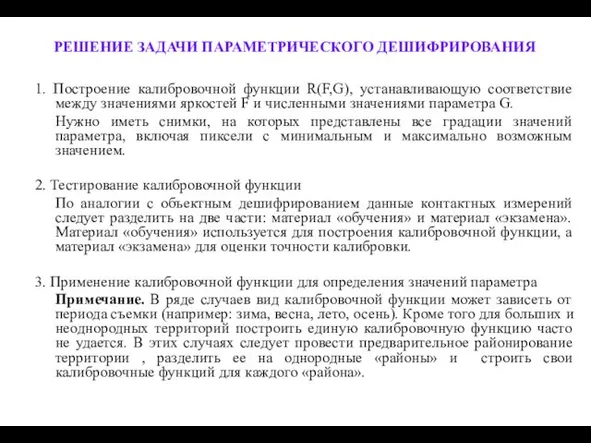
- 30. РЕШЕНИЕ ЗАДАЧИ ПАРАМЕТРИЧЕСКОГО ДЕШИФРИРОВАНИЯ 1. Построение калибровочной функции R(F,G), устанавливающую соответствие между значениями яркостей F и
- 31. Карта температуры подстилающей поверхности.
- 32. Частным случаем параметрического дешифрирования является задача построения рельефа местности по данным ДЗЗ. а) растровое представление, б)
- 33. Пример неправильного использования результатов дешифрирования (распознавание дат сева)
- 34. ТЕХНОЛОГИЧЕСКАЯ СХЕМА ОБРАБОТКИ ДАННЫХ ДЗЗ ДЛЯ БОЛЬШИХ ТЕРРИТОРИЙ Предварительная обработка отдельных сцен Формирование групповых сцен (мозаик)
- 35. ОПИСАНИЕ ТЕРРИТОРИЙ В ГИС Результаты дешифрирования могут быть преобразованы в векторные карты и сохранены в ГИС
- 36. БД ГИС- ТЕРРИТОРИИ БД ГИС- территории представляет собой временной ряд ОКТ описывающих состояния территории, начиная с
- 37. Временной ряд значений декадных VCI в вегетационном сезоне 2010 года май июнь июль август сентябрь 1
- 38. Динамика декадных значений VCI за 2012 г.
- 39. Динамика IVСI территории Казахстана за период 2000-2013гг
- 40. Картографическая и атрибутивная информация, хранящаяся в ГИС, используется для последующей аналитической обработки, включая, распознавание изменений, анализ
- 41. Распознавание изменений в городской застройке
- 42. Картирование изменений Аман-Карагайского лесного массива на территории Костанайской области за 2005-2009 гг. (данные MODIS – разрешение
- 43. Изменение площади посевных земель и паров на территории Костанайской области
- 44. А – система озер Тоболо-Убаганского водороздела; В – система озер Тургайской ложбины; С – система озер
- 45. Геопортал ИТЦ Сканэкс http://www.kosmosnimki.ru/ http://osm.kosmosnimki.ru/ https://scihub.copernicus.eu/
- 47. Скачать презентацию
МЕТОДЫ ТЕМАТИЧЕСКОГО ДЕШИФРИРОВАНИЯ
МЕТОДЫ ТЕМАТИЧЕСКОГО ДЕШИФРИРОВАНИЯ

СХЕМА ИНФОРМАЦИОННЫХ ПОТОКОВ в АСУРТ
СХЕМА ИНФОРМАЦИОННЫХ ПОТОКОВ в АСУРТ

ТЕХНОЛОГИЧЕСКАЯ СХЕМА КОСМИЧЕСКОГО МОНИТОРИНГА
ТЕХНОЛОГИЧЕСКАЯ СХЕМА КОСМИЧЕСКОГО МОНИТОРИНГА
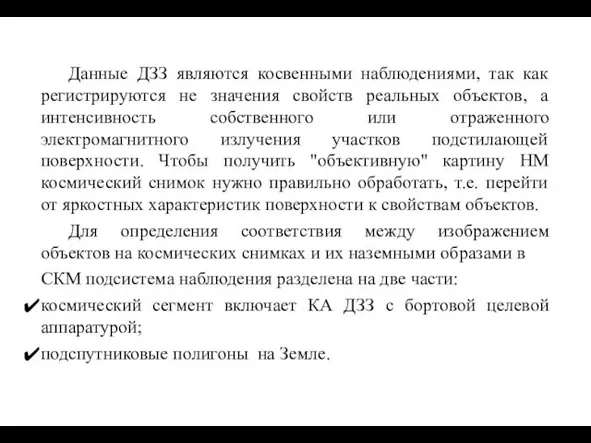
Данные ДЗЗ являются косвенными наблюдениями, так как регистрируются не значения свойств
Данные ДЗЗ являются косвенными наблюдениями, так как регистрируются не значения свойств
ТЕХНОЛОГИЧЕСКАЯ СХЕМА ОБРАБОТКИ ДАННЫХ ДЗЗ В СИСТЕМАХ КОСМИЧЕСКОГО МОНИТОРИНГА
Чтобы перейти от
ТЕХНОЛОГИЧЕСКАЯ СХЕМА ОБРАБОТКИ ДАННЫХ ДЗЗ В СИСТЕМАХ КОСМИЧЕСКОГО МОНИТОРИНГА
Чтобы перейти от
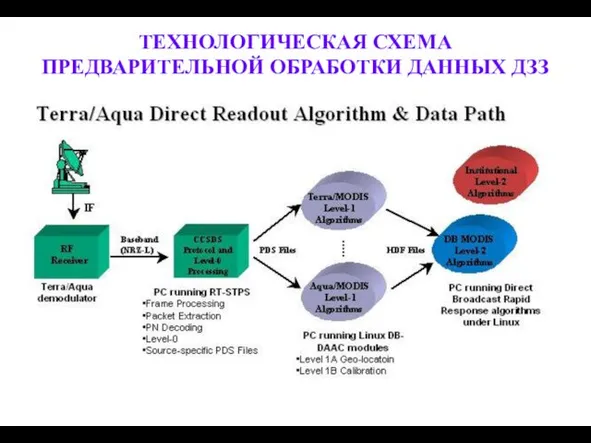
ТЕХНОЛОГИЧЕСКАЯ СХЕМА ПРЕДВАРИТЕЛЬНОЙ ОБРАБОТКИ ДАННЫХ ДЗЗ
ТЕХНОЛОГИЧЕСКАЯ СХЕМА ПРЕДВАРИТЕЛЬНОЙ ОБРАБОТКИ ДАННЫХ ДЗЗ
ПРЕДОБРАБОТКА
Радиометрическая калибровка аппаратных погрешностей
Геометрическая коррекция изображений с учетом суточного вращения
ПРЕДОБРАБОТКА
Радиометрическая калибровка аппаратных погрешностей
Геометрическая коррекция изображений с учетом суточного вращения
ПРИВЕДЕНИЕ ИЗОБРАЖЕНИЙ К ОДИНАКОВЫМ УСЛОВИЯМ СЪЕМКИ
Атмосферная коррекция
- рассеяние и поглощение излучения
ПРИВЕДЕНИЕ ИЗОБРАЖЕНИЙ К ОДИНАКОВЫМ УСЛОВИЯМ СЪЕМКИ
Атмосферная коррекция
- рассеяние и поглощение излучения
ПРИВЕДЕНИЕ ИЗОБРАЖЕНИЙ К ОДИНАКОВЫМ УСЛОВИЯМ СЪЕМКИ
(нормализация яркости)
Тестовые полигоны – участки, для
ПРИВЕДЕНИЕ ИЗОБРАЖЕНИЙ К ОДИНАКОВЫМ УСЛОВИЯМ СЪЕМКИ
(нормализация яркости)
Тестовые полигоны – участки, для
ГЕОМЕТРИЧЕСКАЯ КАЛИБРОВКА И ПРОСТРАНСТВЕННОЕ СОВМЕЩЕНИЕ СНИМКОВ
видимый диапазон
Географическая привязка:
- уровень 1
ГЕОМЕТРИЧЕСКАЯ КАЛИБРОВКА И ПРОСТРАНСТВЕННОЕ СОВМЕЩЕНИЕ СНИМКОВ
видимый диапазон
Географическая привязка:
- уровень 1
ТЕМАТИЧЕСКОЕ ДЕШИФРИРОВАНИЕ
Процедуру построения карты территории Т по космическому снимку называют тематическим
ТЕМАТИЧЕСКОЕ ДЕШИФРИРОВАНИЕ
Процедуру построения карты территории Т по космическому снимку называют тематическим
ОБЪЕКТНОЕ ДЕШИФРИРОВАНИЕ
Формально задачу объектного дешифрирования можно определить как задачу перехода от
ОБЪЕКТНОЕ ДЕШИФРИРОВАНИЕ
Формально задачу объектного дешифрирования можно определить как задачу перехода от
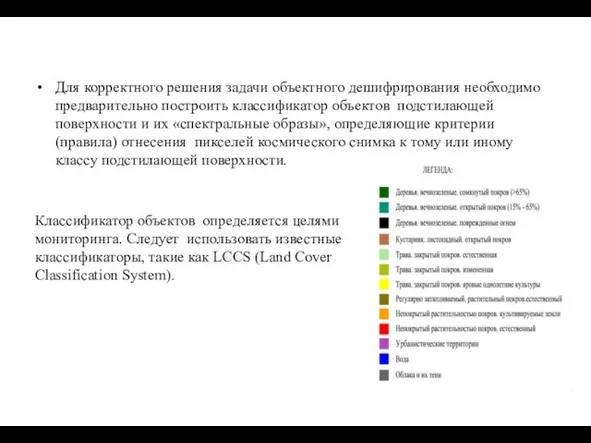
Для корректного решения задачи объектного дешифрирования необходимо предварительно построить классификатор объектов
Для корректного решения задачи объектного дешифрирования необходимо предварительно построить классификатор объектов
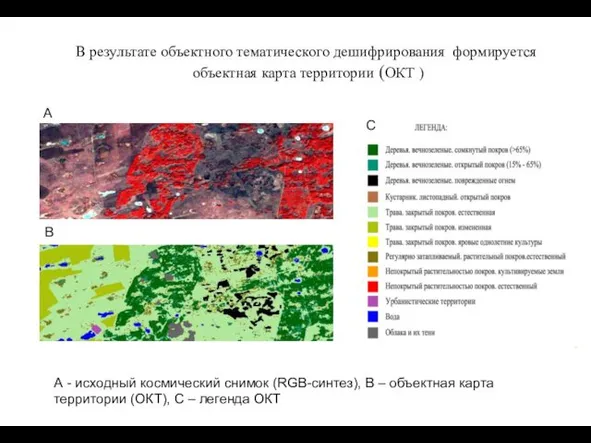
В результате объектного тематического дешифрирования формируется объектная карта территории (ОКТ )
А
В результате объектного тематического дешифрирования формируется объектная карта территории (ОКТ )
А
Возможны два варианта постановки этой задачи:
- вариант «объект – пиксель», когда
Возможны два варианта постановки этой задачи:
- вариант «объект – пиксель», когда
Постановка задачи объектного дешифрирования предполагает, что в пределах территории Т, выбраны
Постановка задачи объектного дешифрирования предполагает, что в пределах территории Т, выбраны
РЕШЕНИЕ ЗАДАЧИ ОБЪЕКТНОГО ДЕШИФРИРОВАНИЯ :
1. Обучение
2. Тестирование (Экзамен)
Экстраполирование
РЕШЕНИЕ ЗАДАЧИ ОБЪЕКТНОГО ДЕШИФРИРОВАНИЯ :
1. Обучение
2. Тестирование (Экзамен)
Экстраполирование
ОБУЧЕНИЕ
Обучение предусматривает определение критериев и правил распознавания объектов по их изображениям
ОБУЧЕНИЕ
Обучение предусматривает определение критериев и правил распознавания объектов по их изображениям
Сложность решения задачи объектного дешифрирования определяется сложностью построения решающих правил, которая
Сложность решения задачи объектного дешифрирования определяется сложностью построения решающих правил, которая
ПРИМЕРЫ РЕШАЮЩИХ ПРАВИЛ
<простой критерий > ::= <имя свойства > < арифметическое
ПРИМЕРЫ РЕШАЮЩИХ ПРАВИЛ
<простой критерий > ::= <имя свойства > < арифметическое
Объектное дешифрирование без обучения
На практике при объектном дешифрировании космических снимков часто
Объектное дешифрирование без обучения
На практике при объектном дешифрировании космических снимков часто
В настоящее время большое число алгоритмов классификации и распознавания образов, включая
В настоящее время большое число алгоритмов классификации и распознавания образов, включая
Матрица погрешностей и ошибки распознавания
Построенные правила применяются для контрольного распознавания объектов
Матрица погрешностей и ошибки распознавания
Построенные правила применяются для контрольного распознавания объектов
ОШИБКИ РАСПОЗНАВАНИЯ
Еij – объект принадлежащий классу j при распознавании отнесен к
ОШИБКИ РАСПОЗНАВАНИЯ
Еij – объект принадлежащий классу j при распознавании отнесен к
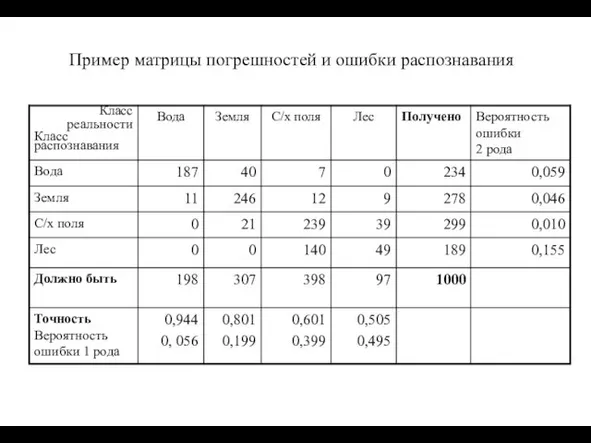
Пример матрицы погрешностей и ошибки распознавания
Пример матрицы погрешностей и ошибки распознавания
ОЦЕНКА КАЧЕСТВА РАСПОЗНАВАНИЯ
«Обучения» продолжается до тех пор, пока на
ОЦЕНКА КАЧЕСТВА РАСПОЗНАВАНИЯ
«Обучения» продолжается до тех пор, пока на
ЭКСТРАПОЛИРОВАНИЕ.
Правила, построенные для объектов тестовых полигонов, применяются для распознавания и картирования
ЭКСТРАПОЛИРОВАНИЕ.
Правила, построенные для объектов тестовых полигонов, применяются для распознавания и картирования
Параметрическое дешифрирование - перехода от изображения территории Т, заданного в виде
Параметрическое дешифрирование - перехода от изображения территории Т, заданного в виде
РЕШЕНИЕ ЗАДАЧИ ПАРАМЕТРИЧЕСКОГО ДЕШИФРИРОВАНИЯ
1. Построение калибровочной функции R(F,G), устанавливающую соответствие между
РЕШЕНИЕ ЗАДАЧИ ПАРАМЕТРИЧЕСКОГО ДЕШИФРИРОВАНИЯ
1. Построение калибровочной функции R(F,G), устанавливающую соответствие между
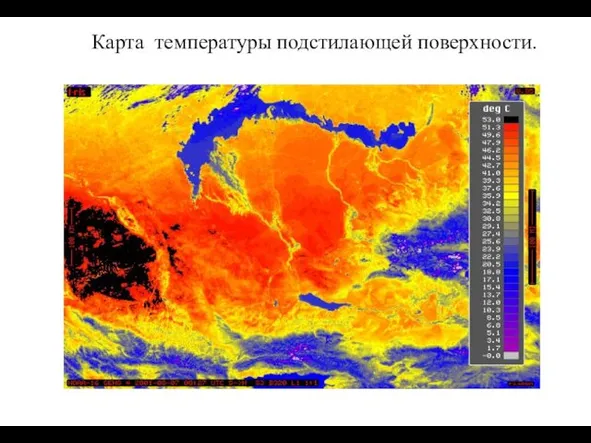
Карта температуры подстилающей поверхности.
Карта температуры подстилающей поверхности.
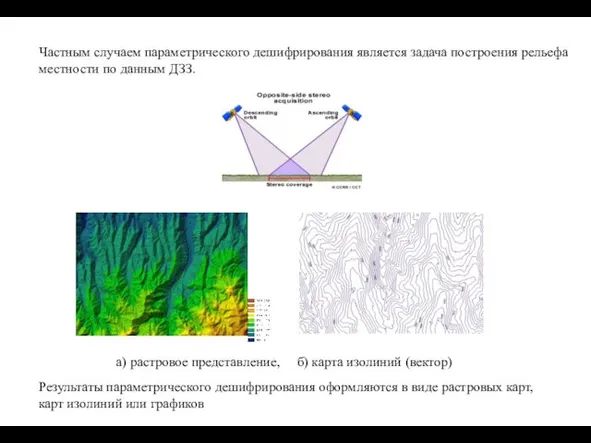
Частным случаем параметрического дешифрирования является задача построения рельефа местности по данным
Частным случаем параметрического дешифрирования является задача построения рельефа местности по данным
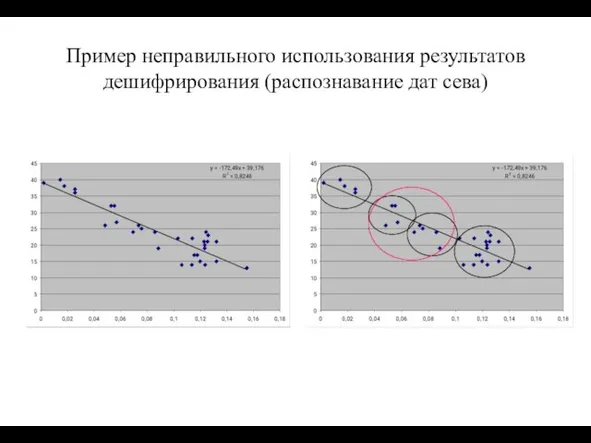
Пример неправильного использования результатов дешифрирования (распознавание дат сева)
Пример неправильного использования результатов дешифрирования (распознавание дат сева)
ТЕХНОЛОГИЧЕСКАЯ СХЕМА ОБРАБОТКИ ДАННЫХ ДЗЗ
ДЛЯ БОЛЬШИХ ТЕРРИТОРИЙ
Предварительная обработка отдельных сцен
Формирование
ТЕХНОЛОГИЧЕСКАЯ СХЕМА ОБРАБОТКИ ДАННЫХ ДЗЗ
ДЛЯ БОЛЬШИХ ТЕРРИТОРИЙ
Предварительная обработка отдельных сцен
Формирование
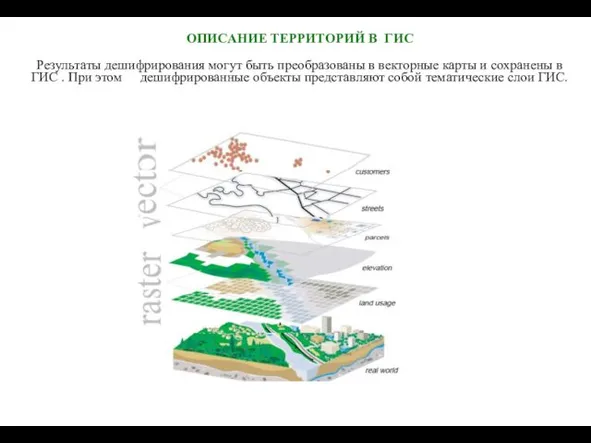
ОПИСАНИЕ ТЕРРИТОРИЙ В ГИС
Результаты дешифрирования могут быть преобразованы в векторные
ОПИСАНИЕ ТЕРРИТОРИЙ В ГИС Результаты дешифрирования могут быть преобразованы в векторные
БД ГИС- ТЕРРИТОРИИ
БД ГИС- территории представляет собой временной ряд ОКТ
БД ГИС- ТЕРРИТОРИИ
БД ГИС- территории представляет собой временной ряд ОКТ
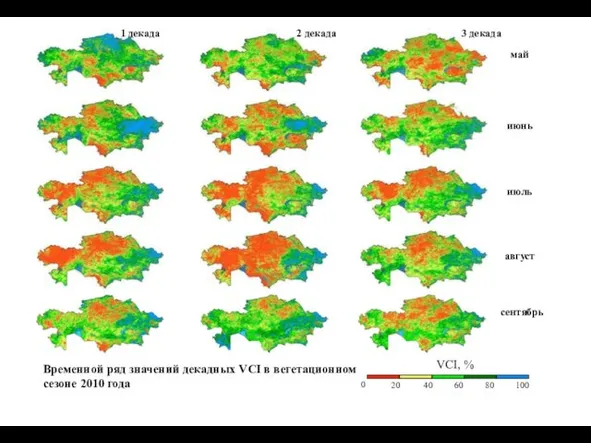
Временной ряд значений декадных VCI в вегетационном сезоне 2010 года
май
июнь
июль
август
сентябрь
1 декада
3
Временной ряд значений декадных VCI в вегетационном сезоне 2010 года
май
июнь
июль
август
сентябрь
1 декада
3
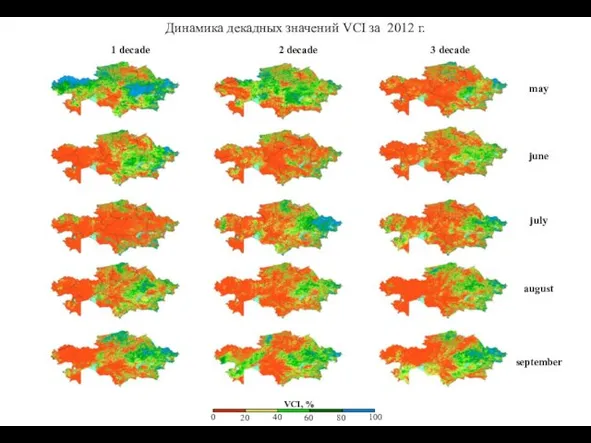
Динамика декадных значений VCI за 2012 г.
Динамика декадных значений VCI за 2012 г.
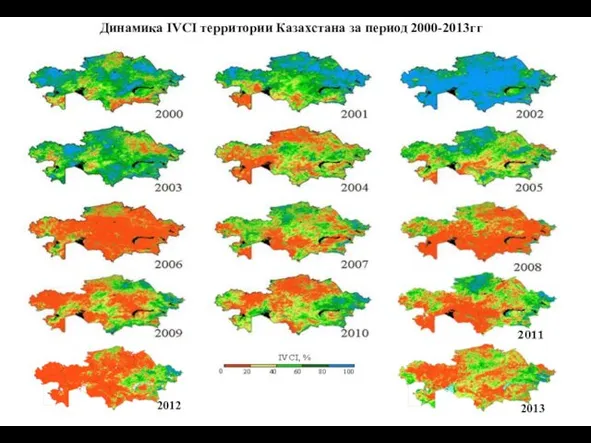
Динамика IVСI территории Казахстана за период 2000-2013гг
Динамика IVСI территории Казахстана за период 2000-2013гг
Картографическая и атрибутивная информация, хранящаяся в ГИС, используется для последующей аналитической
Картографическая и атрибутивная информация, хранящаяся в ГИС, используется для последующей аналитической
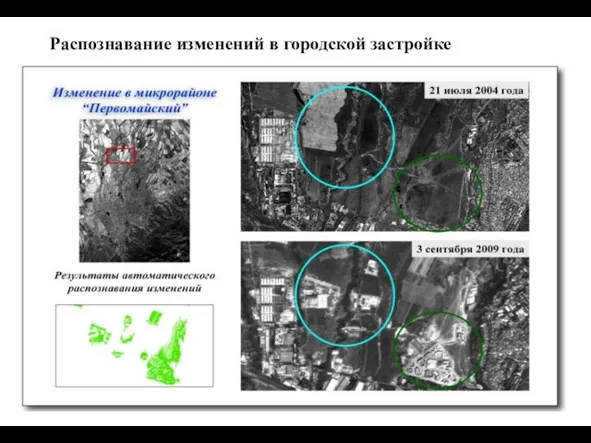
Распознавание изменений в городской застройке
Распознавание изменений в городской застройке
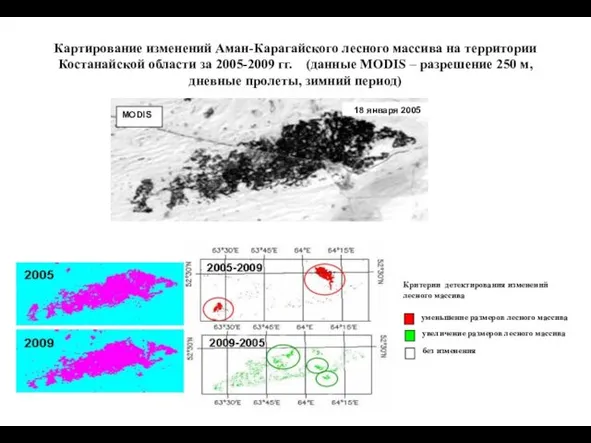
Картирование изменений Аман-Карагайского лесного массива на территории Костанайской области за 2005-2009
Картирование изменений Аман-Карагайского лесного массива на территории Костанайской области за 2005-2009
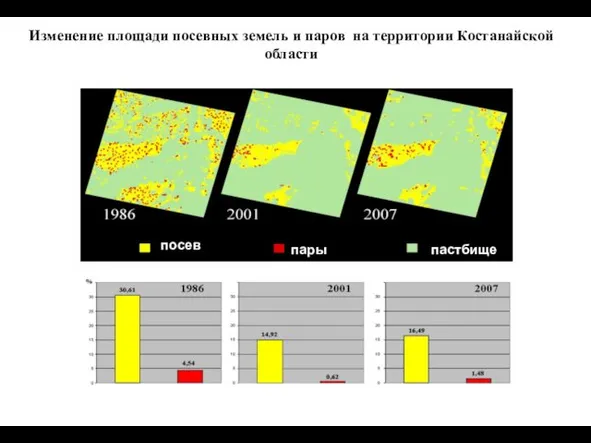
Изменение площади посевных земель и паров на территории Костанайской области
Изменение площади посевных земель и паров на территории Костанайской области
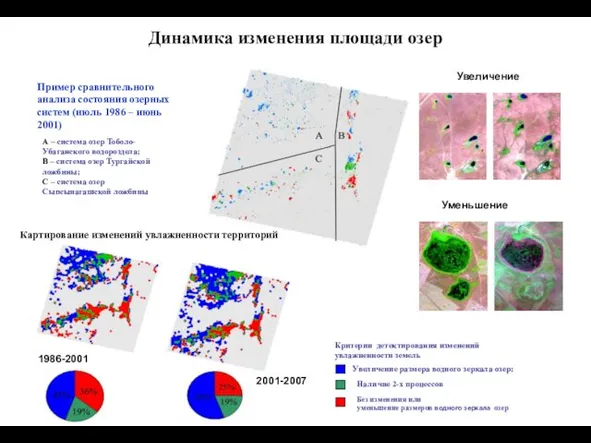
А – система озер Тоболо-Убаганского водороздела;
В – система озер Тургайской ложбины;
А – система озер Тоболо-Убаганского водороздела; В – система озер Тургайской ложбины;
Геопортал ИТЦ Сканэкс
http://www.kosmosnimki.ru/
http://osm.kosmosnimki.ru/
https://scihub.copernicus.eu/
Геопортал ИТЦ Сканэкс
http://www.kosmosnimki.ru/
http://osm.kosmosnimki.ru/
https://scihub.copernicus.eu/
 Презентация "MSC.Flightloads 6.2" - скачать презентации по Информатике
Презентация "MSC.Flightloads 6.2" - скачать презентации по Информатике Мікропроцесорна техніка в електроенергетиці
Мікропроцесорна техніка в електроенергетиці Алгоритмы сортировки на массивах
Алгоритмы сортировки на массивах Презентация на тему "Двумерные массивы"
Презентация на тему "Двумерные массивы" Базы данных - 4
Базы данных - 4 SQL запросы
SQL запросы Теория информации
Теория информации Форматы графических изображений
Форматы графических изображений Структура ИСЭ. Типы и модели предприятий. Подходы к разработке ИСЭ. Моделирование в ИСЭ
Структура ИСЭ. Типы и модели предприятий. Подходы к разработке ИСЭ. Моделирование в ИСЭ Презентация "ПОКОЛЕНИЯ ЭВМ" - скачать презентации по Информатике_
Презентация "ПОКОЛЕНИЯ ЭВМ" - скачать презентации по Информатике_ Онлайн покер
Онлайн покер Створення, редагування та форматування графічних об’єктів в текстовому документі
Створення, редагування та форматування графічних об’єктів в текстовому документі Работа на цель. Проведение конкурсов в сети, обеспечивающих достижение конкретных целей
Работа на цель. Проведение конкурсов в сети, обеспечивающих достижение конкретных целей Unique service of alcohol sale directly from the manufacturer paid for by popular cryptocurrencies
Unique service of alcohol sale directly from the manufacturer paid for by popular cryptocurrencies Презентация "Информационная безопасность" - скачать презентации по Информатике
Презентация "Информационная безопасность" - скачать презентации по Информатике Функции СИ
Функции СИ Безопасное использование сети интернет
Безопасное использование сети интернет GameCore. Monogame
GameCore. Monogame Градиенты. Множественные фоны
Градиенты. Множественные фоны Общие сведения о языке программирования python начала программирования
Общие сведения о языке программирования python начала программирования Презентация "Авторские системы мультимедиа" - скачать презентации по Информатике
Презентация "Авторские системы мультимедиа" - скачать презентации по Информатике Работа с векторными изображениями
Работа с векторными изображениями Презентация "одномерный массиы" - скачать презентации по Информатике
Презентация "одномерный массиы" - скачать презентации по Информатике Почему мне надо купить ноутбук MSI
Почему мне надо купить ноутбук MSI Проектирование баз данных
Проектирование баз данных КИС как составляющая современной инфраструктуры организации
КИС как составляющая современной инфраструктуры организации Формат графического файла
Формат графического файла Разработка пользовательской части игры для студентов колледжа
Разработка пользовательской части игры для студентов колледжа