- Моделирование подражательного поведения и викарного научения в группах мобильных роботов

Содержание
- 2. ВВЕДЕНИЕ Компьютерные системы и сети Термины Викарное научение - усвоение формы поведения другой особи исходя из
- 3. ЦЕЛИ И ЗАДАЧИ Цель Компьютерные системы и сети Реализация модели подражательного поведения и викарного научения в
- 4. Научная новизна работы заключается в предложенном варианте решения задачи фуражировки на основе модели подражательного поведения и
- 5. ПОЛОЖЕНИЯ, ВЫНОСИМЫЕ НА ЗАЩИТУ Компьютерные системы и сети Алгоритм возвращения робота-разведчика домой после нахождения необходимого объекта.
- 6. ОБЗОР МОДЕЛЕЙ ПОДРАЖАТЕЛЬНОГО ПОВЕДЕНИЯ И ВИКАРНОГО НАУЧЕНИЯ В ГРУППОВОЙ РОБОТОТЕХНИКЕ Компьютерные системы и сети
- 7. ПРЕДЛАГАЕМЫЕ ПОДХОДЫ К РЕШЕНИЮ ЗАДАЧИ Задача для моделирования Компьютерные системы и сети Фуражировка, т.к. роль коммуникации
- 8. ПРЕДЛАГАЕМЫЕ МЕТОДЫ Компьютерные системы и сети Правила инициации поиска пищи. Правила формирования сведений об обратном маршруте
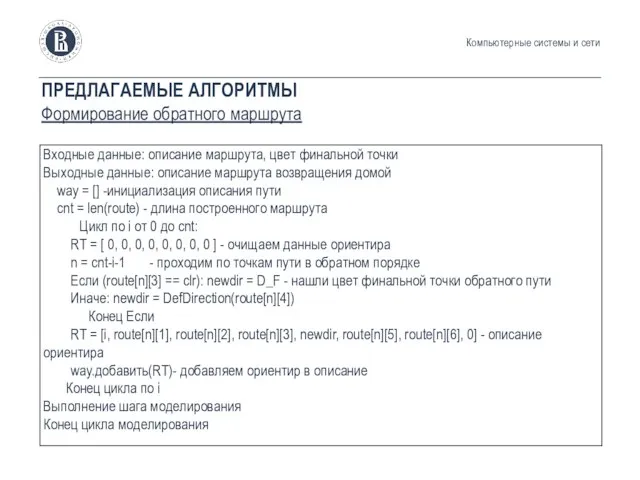
- 9. ПРЕДЛАГАЕМЫЕ АЛГОРИТМЫ Формирование обратного маршрута Компьютерные системы и сети
- 10. ПРЕДЛАГАЕМЫЕ АЛГОРИТМЫ Формирование обратного маршрута Компьютерные системы и сети
- 11. ПРЕДЛАГАЕМЫЕ АВТОМАТЫ УПРАВЛЕНИЯ ПОВЕДЕНИЕМ Инициация подражательного поведения Компьютерные системы и сети Схема автомата, управляющего роботом-разведчиком: привлечение
- 12. ПРЕДЛАГАЕМЫЕ АВТОМАТЫ УПРАВЛЕНИЯ ПОВЕДЕНИЕМ Формирование пути преследователя Компьютерные системы и сети Схема автомата, управляющего роботом-фуражиром при
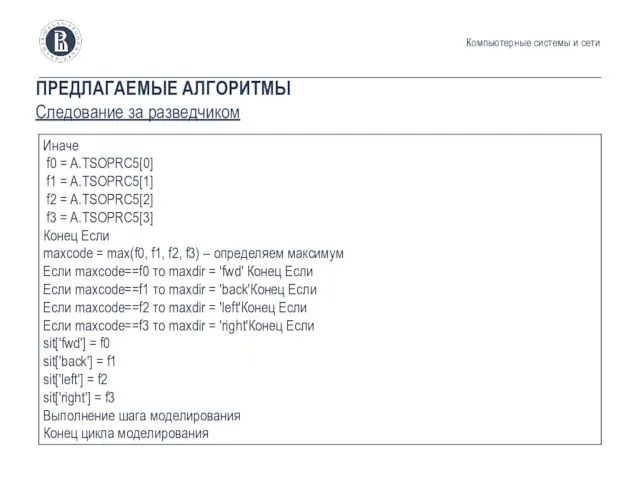
- 13. ПРЕДЛАГАЕМЫЕ АЛГОРИТМЫ Следование за разведчиком Компьютерные системы и сети
- 14. ПРЕДЛАГАЕМЫЕ АЛГОРИТМЫ Следование за разведчиком Компьютерные системы и сети
- 15. ПРОГРАММНАЯ РЕАЛИЗАЦИЯ Компьютерные системы и сети Система моделирования Kvorum[5], которая работает под управлением фреймворка ROS (Robot
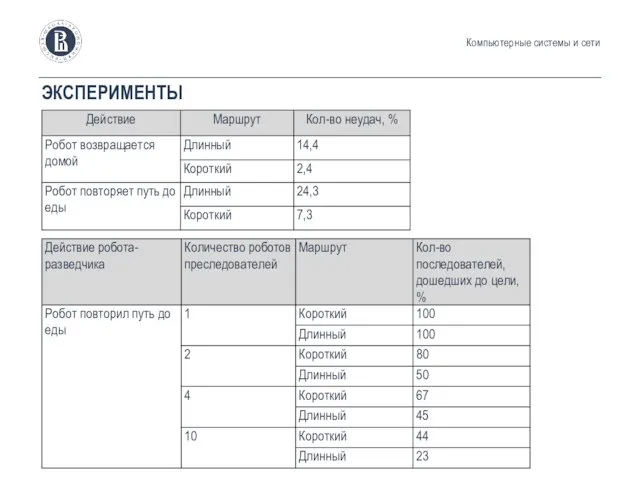
- 16. ЭКСПЕРИМЕНТЫ Компьютерные системы и сети
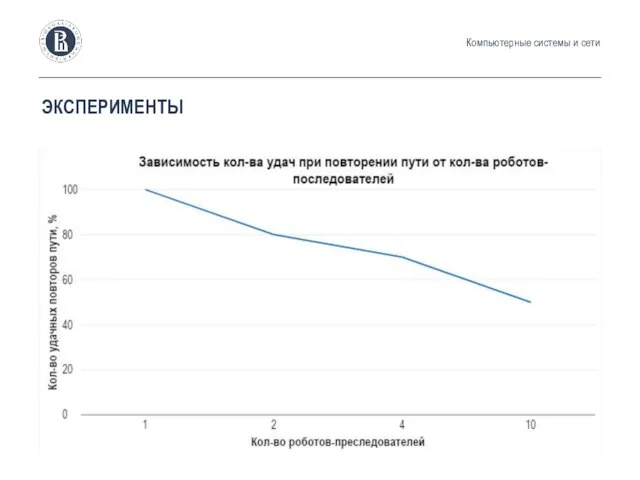
- 17. ЭКСПЕРИМЕНТЫ Компьютерные системы и сети
- 18. ЭКСПЕРИМЕНТЫ Компьютерные системы и сети
- 19. ЗАКЛЮЧЕНИЕ Проведен обзор моделей подражательного поведения и викарного научения при решении задач ГРТ. Произведен выбор и
- 20. ОСНОВНАЯ ЛИТЕРАТУРА Карпов В. Э. Модели социального поведения в групповой роботехнике [Статья] // Управление большими системами.
- 22. Скачать презентацию
ВВЕДЕНИЕ
Компьютерные системы и сети
Термины
Викарное научение - усвоение формы поведения другой особи
ВВЕДЕНИЕ
Компьютерные системы и сети
Термины
Викарное научение - усвоение формы поведения другой особи
ЦЕЛИ И ЗАДАЧИ
Цель
Компьютерные системы и сети
Реализация модели подражательного поведения и викарного
ЦЕЛИ И ЗАДАЧИ
Цель
Компьютерные системы и сети
Реализация модели подражательного поведения и викарного
Научная новизна работы заключается в предложенном варианте решения задачи фуражировки на
Научная новизна работы заключается в предложенном варианте решения задачи фуражировки на
ПОЛОЖЕНИЯ, ВЫНОСИМЫЕ НА ЗАЩИТУ
Компьютерные системы и сети
Алгоритм возвращения робота-разведчика домой после
ПОЛОЖЕНИЯ, ВЫНОСИМЫЕ НА ЗАЩИТУ
Компьютерные системы и сети
Алгоритм возвращения робота-разведчика домой после
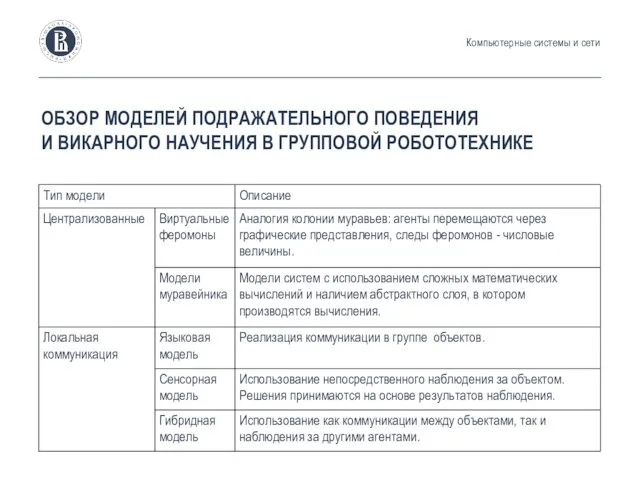
ОБЗОР МОДЕЛЕЙ ПОДРАЖАТЕЛЬНОГО ПОВЕДЕНИЯ
И ВИКАРНОГО НАУЧЕНИЯ В ГРУППОВОЙ РОБОТОТЕХНИКЕ
Компьютерные системы
ОБЗОР МОДЕЛЕЙ ПОДРАЖАТЕЛЬНОГО ПОВЕДЕНИЯ
И ВИКАРНОГО НАУЧЕНИЯ В ГРУППОВОЙ РОБОТОТЕХНИКЕ
Компьютерные системы
ПРЕДЛАГАЕМЫЕ ПОДХОДЫ К РЕШЕНИЮ ЗАДАЧИ
Задача для моделирования
Компьютерные системы и сети
Фуражировка, т.к.
ПРЕДЛАГАЕМЫЕ ПОДХОДЫ К РЕШЕНИЮ ЗАДАЧИ
Задача для моделирования
Компьютерные системы и сети
Фуражировка, т.к.
ПРЕДЛАГАЕМЫЕ МЕТОДЫ
Компьютерные системы и сети
Правила инициации поиска пищи.
Правила формирования сведений об
ПРЕДЛАГАЕМЫЕ МЕТОДЫ
Компьютерные системы и сети
Правила инициации поиска пищи.
Правила формирования сведений об
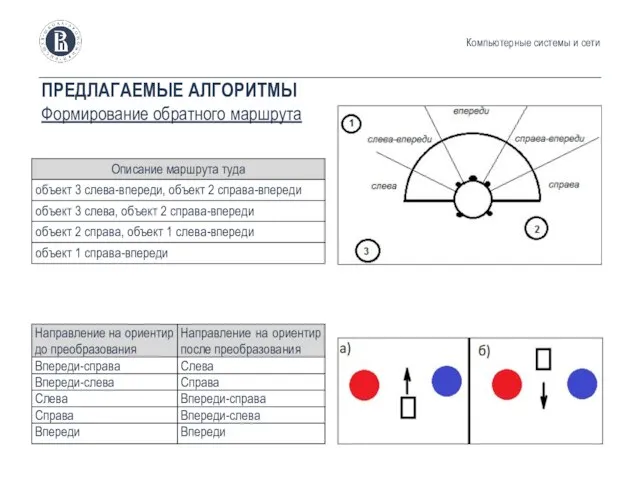
ПРЕДЛАГАЕМЫЕ АЛГОРИТМЫ
Формирование обратного маршрута
Компьютерные системы и сети
ПРЕДЛАГАЕМЫЕ АЛГОРИТМЫ
Формирование обратного маршрута
Компьютерные системы и сети
ПРЕДЛАГАЕМЫЕ АЛГОРИТМЫ
Формирование обратного маршрута
Компьютерные системы и сети
ПРЕДЛАГАЕМЫЕ АЛГОРИТМЫ
Формирование обратного маршрута
Компьютерные системы и сети
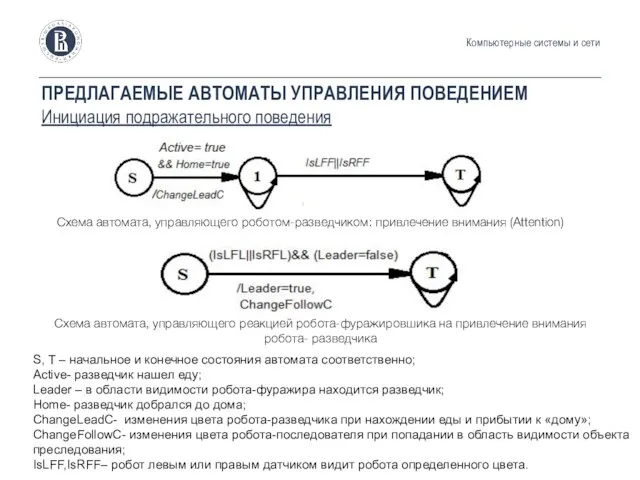
ПРЕДЛАГАЕМЫЕ АВТОМАТЫ УПРАВЛЕНИЯ ПОВЕДЕНИЕМ
Инициация подражательного поведения
Компьютерные системы и сети
Схема автомата, управляющего
ПРЕДЛАГАЕМЫЕ АВТОМАТЫ УПРАВЛЕНИЯ ПОВЕДЕНИЕМ
Инициация подражательного поведения
Компьютерные системы и сети
Схема автомата, управляющего
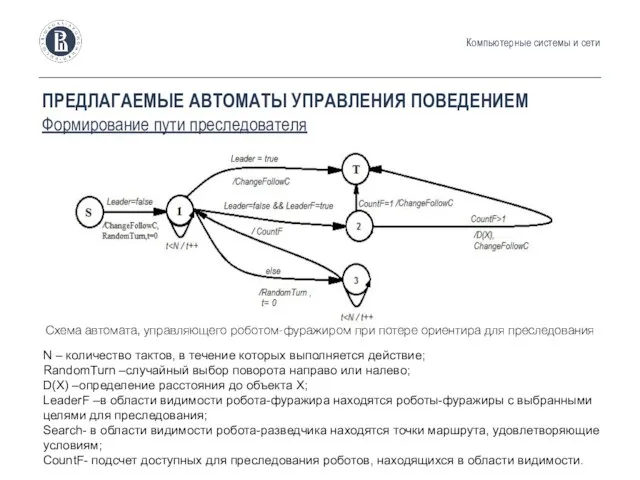
ПРЕДЛАГАЕМЫЕ АВТОМАТЫ УПРАВЛЕНИЯ ПОВЕДЕНИЕМ
Формирование пути преследователя
Компьютерные системы и сети
Схема автомата,
ПРЕДЛАГАЕМЫЕ АВТОМАТЫ УПРАВЛЕНИЯ ПОВЕДЕНИЕМ
Формирование пути преследователя
Компьютерные системы и сети
Схема автомата,
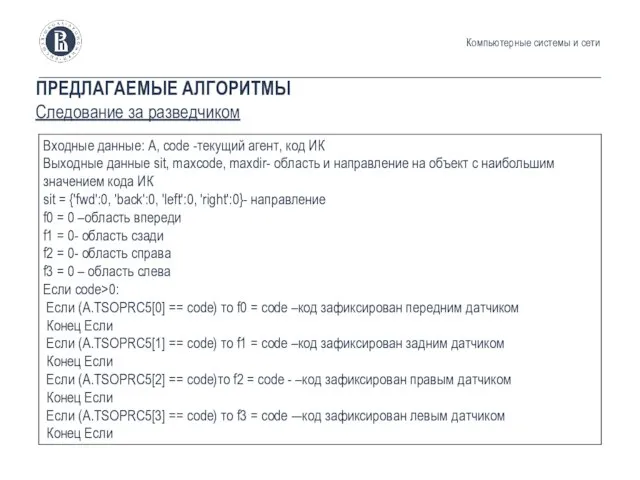
ПРЕДЛАГАЕМЫЕ АЛГОРИТМЫ
Следование за разведчиком
Компьютерные системы и сети
ПРЕДЛАГАЕМЫЕ АЛГОРИТМЫ
Следование за разведчиком
Компьютерные системы и сети
ПРЕДЛАГАЕМЫЕ АЛГОРИТМЫ
Следование за разведчиком
Компьютерные системы и сети
ПРЕДЛАГАЕМЫЕ АЛГОРИТМЫ
Следование за разведчиком
Компьютерные системы и сети
![ПРОГРАММНАЯ РЕАЛИЗАЦИЯ Компьютерные системы и сети Система моделирования Kvorum[5], которая работает](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/616071/slide-14.jpg)
ПРОГРАММНАЯ РЕАЛИЗАЦИЯ
Компьютерные системы и сети
Система моделирования Kvorum[5], которая работает под управлением
ПРОГРАММНАЯ РЕАЛИЗАЦИЯ
Компьютерные системы и сети
Система моделирования Kvorum[5], которая работает под управлением

ЭКСПЕРИМЕНТЫ
Компьютерные системы и сети
ЭКСПЕРИМЕНТЫ
Компьютерные системы и сети
ЭКСПЕРИМЕНТЫ
Компьютерные системы и сети
ЭКСПЕРИМЕНТЫ
Компьютерные системы и сети
ЭКСПЕРИМЕНТЫ
Компьютерные системы и сети
ЭКСПЕРИМЕНТЫ
Компьютерные системы и сети
ЗАКЛЮЧЕНИЕ
Проведен обзор моделей подражательного поведения и викарного научения при решении задач
ЗАКЛЮЧЕНИЕ
Проведен обзор моделей подражательного поведения и викарного научения при решении задач
ОСНОВНАЯ ЛИТЕРАТУРА
Карпов В. Э. Модели социального поведения в групповой роботехнике [Статья]
ОСНОВНАЯ ЛИТЕРАТУРА
Карпов В. Э. Модели социального поведения в групповой роботехнике [Статья]
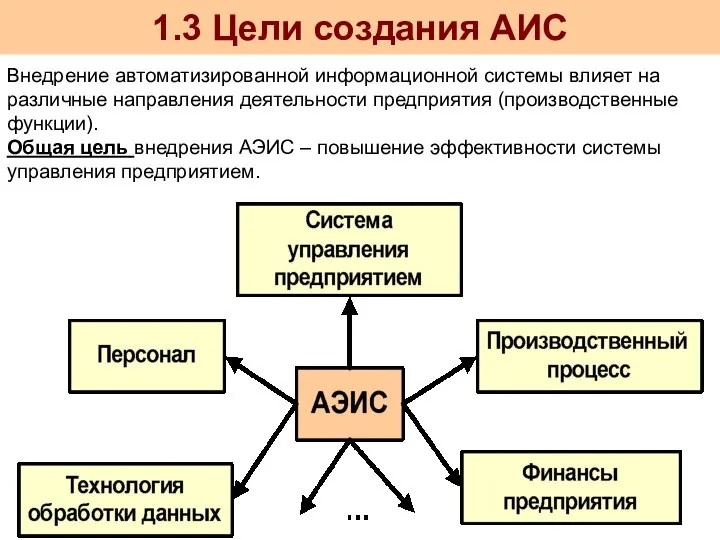 Цели создания АИС
Цели создания АИС Презентация по информатике Дискретные и непрерывные сигналы носители информации
Презентация по информатике Дискретные и непрерывные сигналы носители информации  Лекция 1-2. Регулирование температуры перегрева пара
Лекция 1-2. Регулирование температуры перегрева пара особенности Mac ОС и Linux
особенности Mac ОС и Linux Разработка пользовательских интерфейсов сайта хоккейной команды Ментол Минск
Разработка пользовательских интерфейсов сайта хоккейной команды Ментол Минск Алгоритм как модель деятельности
Алгоритм как модель деятельности Системы счисления
Системы счисления Структура электронных таблиц
Структура электронных таблиц Создание веб-сайтов
Создание веб-сайтов Shortest paths and spanning trees in graphs
Shortest paths and spanning trees in graphs Расчет адресов сети IPv4. Основы сетей телекоммуникаций. Деление на подсети с использованием масок
Расчет адресов сети IPv4. Основы сетей телекоммуникаций. Деление на подсети с использованием масок Вероятностный или содержательный подход к определению количества информации
Вероятностный или содержательный подход к определению количества информации Information resources
Information resources Алгоритмы поиска
Алгоритмы поиска BumerBoom
BumerBoom Интерфейсы
Интерфейсы Информационная безопасность в сети интернет
Информационная безопасность в сети интернет Разработка сайтов
Разработка сайтов Привлечение аудитории в Instagram
Привлечение аудитории в Instagram Основы SQL. Соединения и теоретико-множественные операции над отношениями
Основы SQL. Соединения и теоретико-множественные операции над отношениями Smeshariki Hack and Fakt
Smeshariki Hack and Fakt Сервис проверки первичной медицинской документации
Сервис проверки первичной медицинской документации Семинары по подготовке к Олимпиаде D-Link по сетевым технологиям
Семинары по подготовке к Олимпиаде D-Link по сетевым технологиям Разметка Cloud.megafon.ru
Разметка Cloud.megafon.ru Среда программирования Free Pascal
Среда программирования Free Pascal Автор: Гортунова Надежда 1 курс начальное образование
Автор: Гортунова Надежда 1 курс начальное образование Групповая деятельность на уроках информатики
Групповая деятельность на уроках информатики Компьютерная графика и области её применения
Компьютерная графика и области её применения