- Моделирование систем синхронизации с использованием хаотических сигналов

Содержание
- 2. Цель дипломного проекта 4. Разработано программное обеспечение для проведения численных экспериментов по синхронизации нелинейных динамических систем,
- 3. Обзор методов синхронизации в системах связи Существует два типа модемов: когерентный и некогерентный. Когерентный модем требует
- 4. Синхронизация двух динамических систем Хаос имеет длительное непредсказуемое поведение. Это - обычно выражается математически как чувствительность
- 5. Примеры аттракторов Аттрактор (от англ. to attract – притягивать) – геометрическая структура, характеризующая поведение в фазовом
- 6. Метод точечных отображений Согласно этому методу, исследуют не фазовую траекторию системы, а ее отображение на секущую
- 7. Использование хаотических сигналов в телекоммуникациях Динамический хаос обладает следующими свойствами: Сплошной спектр мощности Экспоненциально спадающая корреляционная
- 8. Система Лоренца Первым по-настоящему выйти из плоскости удалось американскому метеорологу Эдварду Лоренцу в конце 1970-х годов.
- 9. Самосинхронизация систем Лоренца. Используя выше упомянутый пример, мы можем увидеть, на что похожа геометрия синхронных атракторов
- 10. Использование модель Лоренца для восстановления полезного сигнала на фоне хаотического процесса. Для наглядности проведем несколько экспериментов
- 11. Спектоктрограммы для синуса Спектр синуса Спектр синуса +хаотический сигнал Спектр после фильтра Винера.
- 12. Эксперимент №2 Эксперимент №3
- 13. Спектрограммы Эксперимента №3 Спектр речевого сигнала Р(t). Спектрограммы Эксперимента №2 Спектр речевого сигнала + хаотический Спектр
- 14. Ленточный график проведения исследования Структура затрат на проведение исследования Основные технико-экономические показатели проведения исследования Смета затрат
- 16. Скачать презентацию
Цель дипломного проекта
4. Разработано программное обеспечение для проведения численных экспериментов по
Цель дипломного проекта
4. Разработано программное обеспечение для проведения численных экспериментов по
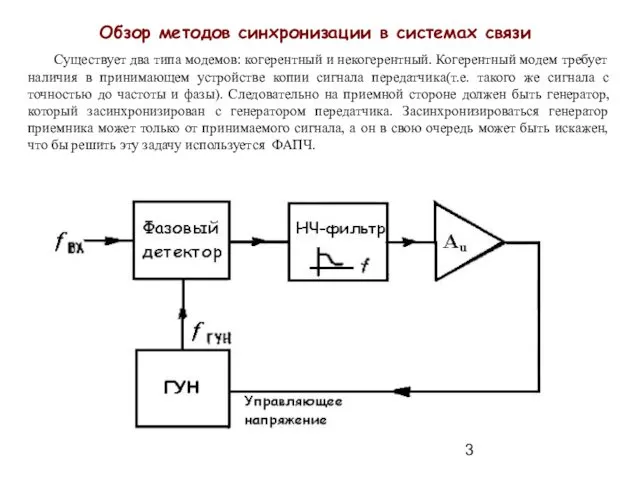
Обзор методов синхронизации в системах связи
Существует два типа модемов: когерентный
Обзор методов синхронизации в системах связи
Существует два типа модемов: когерентный

Синхронизация двух динамических систем
Хаос имеет длительное непредсказуемое поведение. Это
Синхронизация двух динамических систем
Хаос имеет длительное непредсказуемое поведение. Это
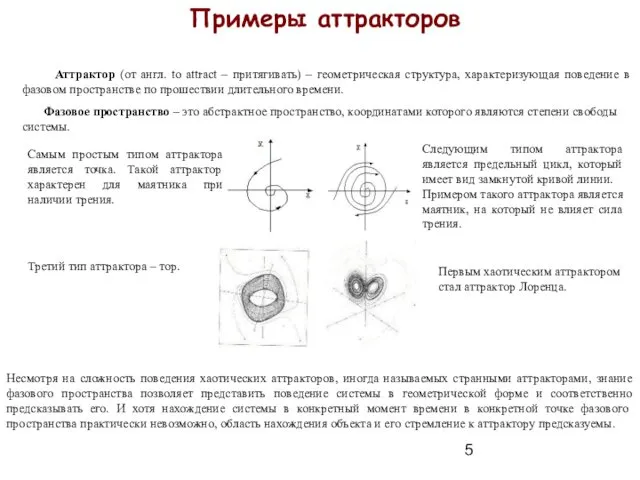
Примеры аттракторов
Аттрактор (от англ. to attract – притягивать) – геометрическая
Примеры аттракторов
Аттрактор (от англ. to attract – притягивать) – геометрическая
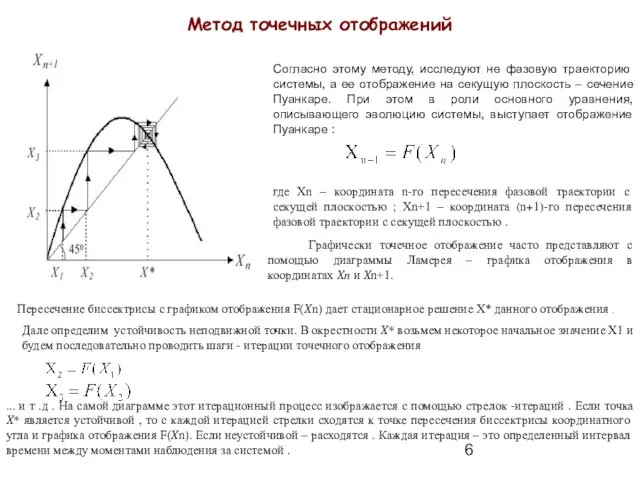
Метод точечных отображений
Согласно этому методу, исследуют не фазовую траекторию системы, а
Метод точечных отображений
Согласно этому методу, исследуют не фазовую траекторию системы, а
Использование хаотических сигналов в телекоммуникациях
Динамический хаос обладает следующими свойствами:
Сплошной спектр
Использование хаотических сигналов в телекоммуникациях
Динамический хаос обладает следующими свойствами:
Сплошной спектр
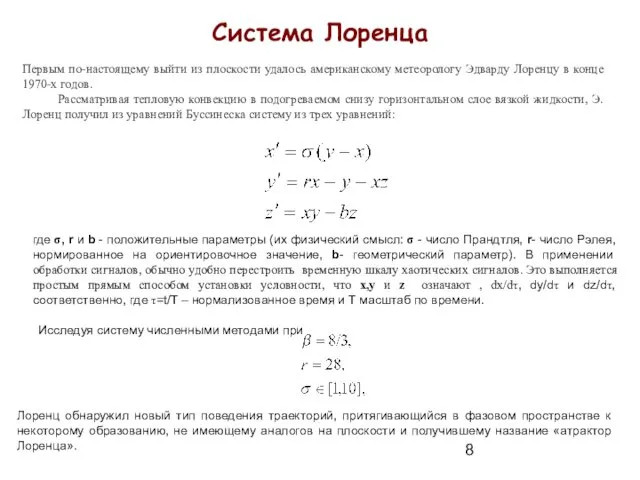
Система Лоренца
Первым по-настоящему выйти из плоскости удалось американскому метеорологу Эдварду Лоренцу
Система Лоренца
Первым по-настоящему выйти из плоскости удалось американскому метеорологу Эдварду Лоренцу
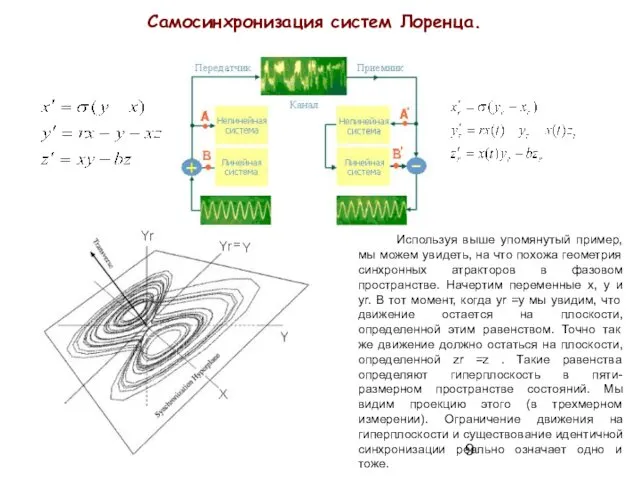
Самосинхронизация систем Лоренца.
Используя выше упомянутый пример, мы можем увидеть, на
Самосинхронизация систем Лоренца.
Используя выше упомянутый пример, мы можем увидеть, на
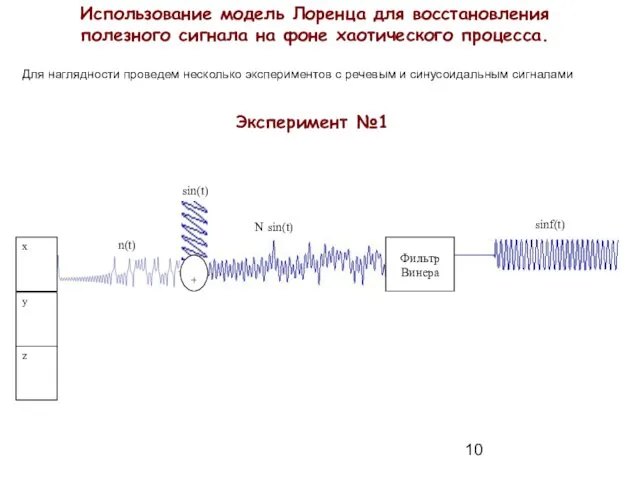
Использование модель Лоренца для восстановления полезного сигнала на фоне хаотического процесса.
Для
Использование модель Лоренца для восстановления полезного сигнала на фоне хаотического процесса.
Для
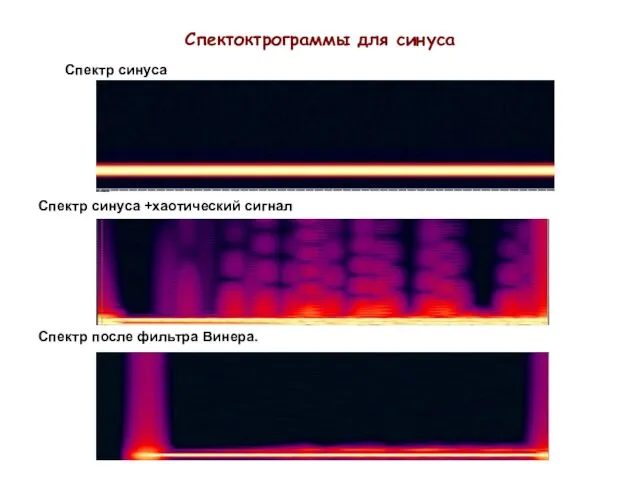
Спектоктрограммы для синуса
Спектр синуса
Спектр синуса +хаотический сигнал
Спектр после фильтра Винера.
Спектоктрограммы для синуса
Спектр синуса
Спектр синуса +хаотический сигнал
Спектр после фильтра Винера.
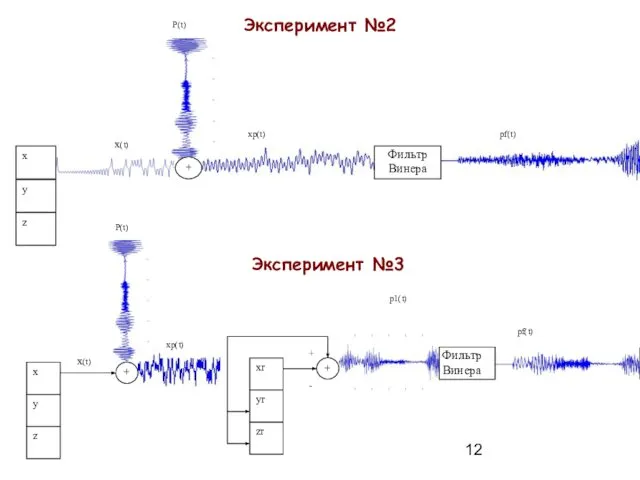
Эксперимент №2
Эксперимент №3
Эксперимент №2
Эксперимент №3
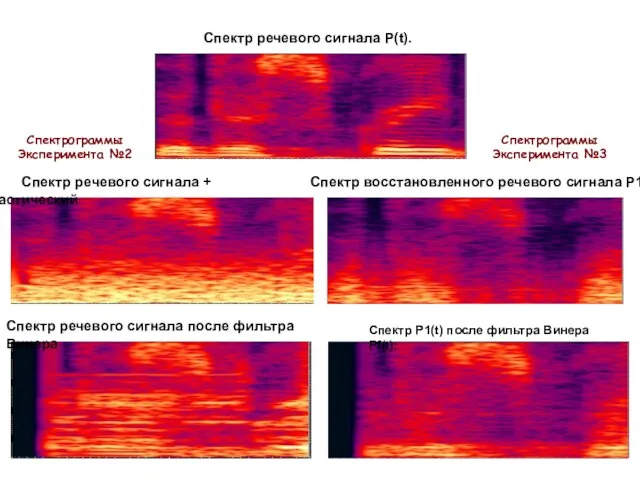
Спектрограммы
Эксперимента №3
Спектр речевого сигнала Р(t).
Спектрограммы
Эксперимента №2
Спектр речевого сигнала + хаотический
Спектр
Спектрограммы
Эксперимента №3
Спектр речевого сигнала Р(t).
Спектрограммы
Эксперимента №2
Спектр речевого сигнала + хаотический
Спектр
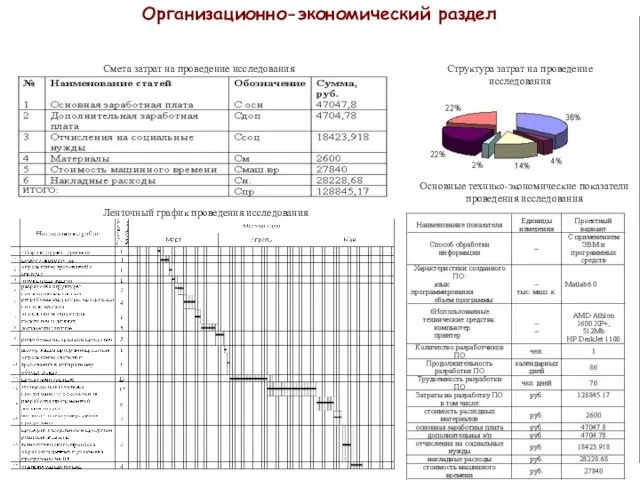
Ленточный график проведения исследования
Структура затрат на проведение исследования
Основные технико-экономические показатели проведения
Ленточный график проведения исследования
Структура затрат на проведение исследования
Основные технико-экономические показатели проведения
 Ғаламтормен дұрыс жұмыс жасау - мәдениет
Ғаламтормен дұрыс жұмыс жасау - мәдениет Компьютерлік модель. Компьютерде модельдерді зерттеу
Компьютерлік модель. Компьютерде модельдерді зерттеу Информация вокруг нас
Информация вокруг нас Разработка базы данных «Магазин канцелярских товаров» в СУБД MS ACCESS
Разработка базы данных «Магазин канцелярских товаров» в СУБД MS ACCESS Организация вычислений в электронных таблицах
Организация вычислений в электронных таблицах Количество информации. Единицы измерения количества информации
Количество информации. Единицы измерения количества информации Программирование на Python. Введение в программирование
Программирование на Python. Введение в программирование Модель. Моделювання. (Лекция 2)
Модель. Моделювання. (Лекция 2) Управление целостностью данных. (Лекция 5)
Управление целостностью данных. (Лекция 5) Основные логические операции
Основные логические операции История развития вычислительной техники
История развития вычислительной техники Основы работы с базами данных
Основы работы с базами данных Средства разработки презентаций. Назначение и возможности Power Point
Средства разработки презентаций. Назначение и возможности Power Point Программа Microsoft Word. (Тема 4)
Программа Microsoft Word. (Тема 4) Speaking practice
Speaking practice Курсовой проект. Разработка интерфейса проектируемого приложения для работы с базой данных
Курсовой проект. Разработка интерфейса проектируемого приложения для работы с базой данных Устройства компьютера
Устройства компьютера Перевод чисел в различные системы счисления
Перевод чисел в различные системы счисления Использование интернет-ресурсов
Использование интернет-ресурсов Каскадное информирование
Каскадное информирование ПРАВОВАЯ ИНФОРМАТИКА
ПРАВОВАЯ ИНФОРМАТИКА Условный оператор среда Исполнители Учитель информатики МБОУ СОШ №1 с. Александров-Гай Саратовской области Гуреева Е.А.
Условный оператор среда Исполнители Учитель информатики МБОУ СОШ №1 с. Александров-Гай Саратовской области Гуреева Е.А. Особенности автоматизации бухгалтерского учета
Особенности автоматизации бухгалтерского учета Инструкция для заполнения заявления и согласия
Инструкция для заполнения заявления и согласия Мобильные вирусы
Мобильные вирусы Презентация "Повышение квалификации по ИКТ" - скачать презентации по Информатике
Презентация "Повышение квалификации по ИКТ" - скачать презентации по Информатике Диаграммы классов - UML
Диаграммы классов - UML Использование голосового помощника Маруся в образовательной и внеучебной жизни класса
Использование голосового помощника Маруся в образовательной и внеучебной жизни класса