- ОПЕРАЦИОННЫЕ СИСТЕМЫ Ершов Б.Л.

Содержание
- 2. Тупики ОГЛАВЛЕНИЕ Понятие тупика Средства обнаружения тупиков Модель Холта Сеть Петри Модель пространства состояний Примеры поиска
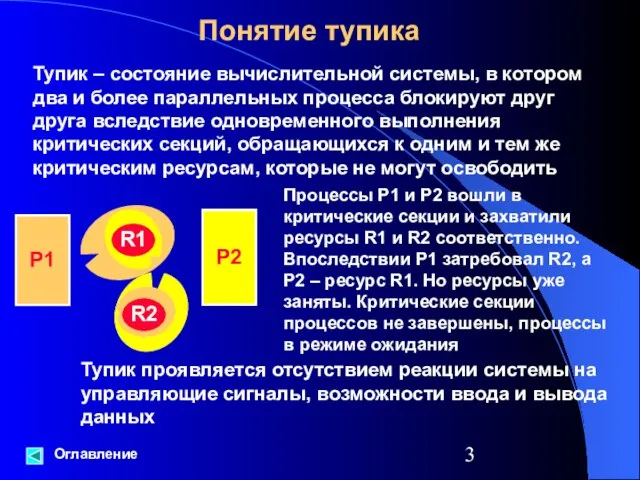
- 3. Понятие тупика Оглавление Тупик – состояние вычислительной системы, в котором два и более параллельных процесса блокируют
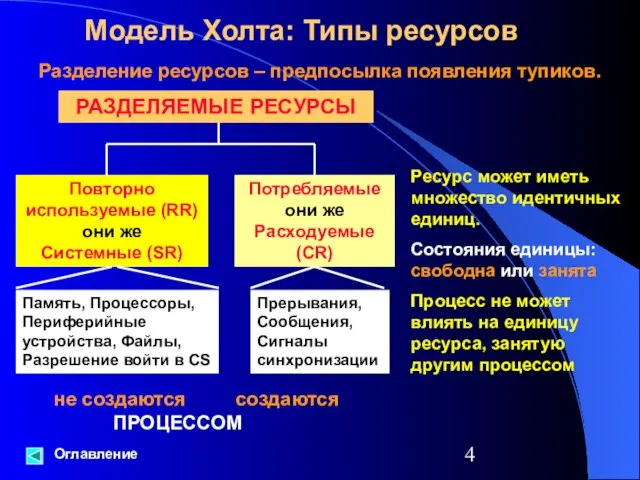
- 4. Модель Холта: Типы ресурсов Оглавление Разделение ресурсов – предпосылка появления тупиков. РАЗДЕЛЯЕМЫЕ РЕСУРСЫ Повторно используемые (RR)
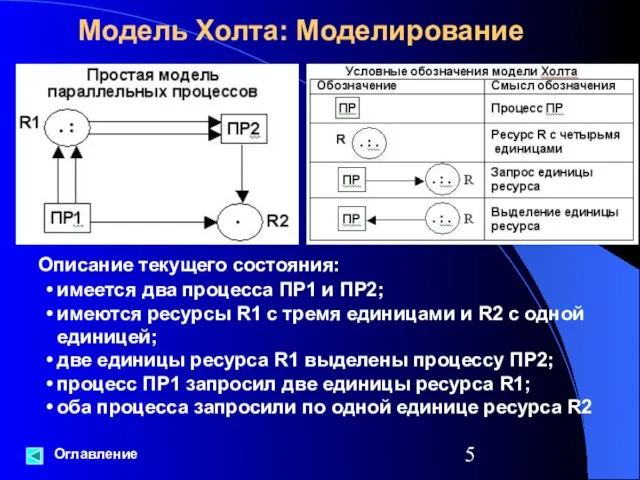
- 5. Модель Холта: Моделирование Оглавление Описание текущего состояния: имеется два процесса ПР1 и ПР2; имеются ресурсы R1
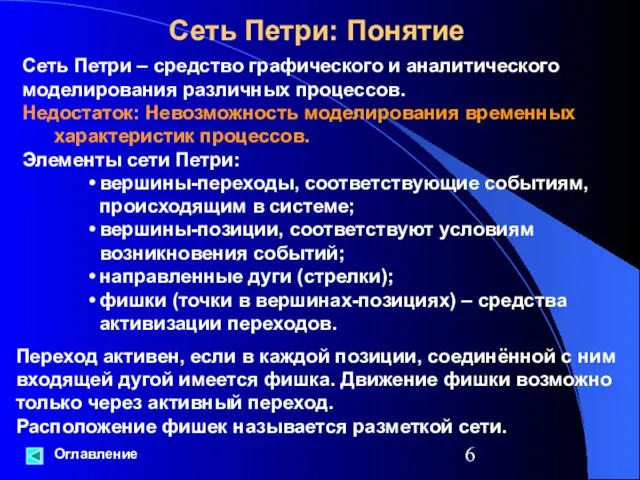
- 6. Сеть Петри: Понятие Оглавление Сеть Петри – средство графического и аналитического моделирования различных процессов. Недостаток: Невозможность
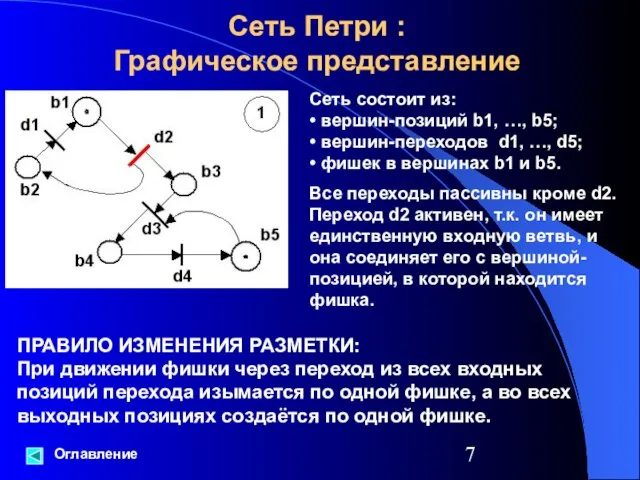
- 7. Сеть Петри : Графическое представление Оглавление Сеть состоит из: • вершин-позиций b1, …, b5; • вершин-переходов
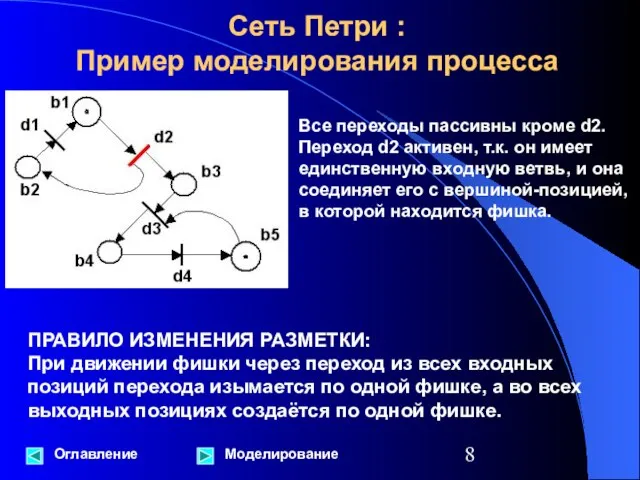
- 8. Сеть Петри : Пример моделирования процесса Оглавление Все переходы пассивны кроме d2. Переход d2 активен, т.к.
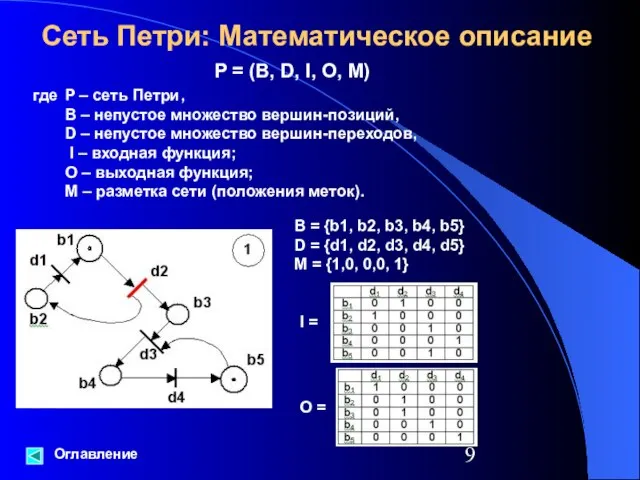
- 9. Сеть Петри: Математическое описание Оглавление P = (B, D, I, O, M) где P – сеть
- 10. Сеть Петри: Решаемые задачи и недостатки Оглавление С помощью сетей Петри решаются следующие задачи:
- 11. Модель пространства состояний Оглавление Модель пространственных состояний описывает состояния процессов на двух временных шкалах, соответствующих процессам
- 12. Исходные данные Системным ресурсом процессов ПР1 и ПР2 являются семафоры, описанные программным кодом (рис.1). Модель Холта
- 13. Примеры поиска тупиков Оглавление Поиск тупика на системных ресурсах SR с помощью моделей Холта и пространственных
- 14. Условия возникновения тупика Оглавление Для появления тупиков должны одновременно выполняться четыре условия: взаимное исключение не запрещает
- 15. Тупик Оглавление Тупик проявляется отсутствием реакции системы на управляющие сигналы, возможности ввода и вывода данных
- 16. Тупик Оглавление Тупик проявляется отсутствием реакции системы на управляющие сигналы, возможности ввода и вывода данных
- 17. Тупик Оглавление Тупик проявляется отсутствием реакции системы на управляющие сигналы, возможности ввода и вывода данных
- 18. СПРАВОЧНАЯ СИСТЕМА
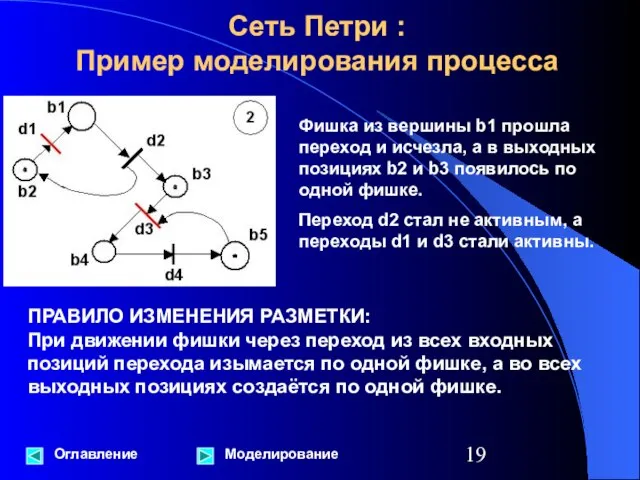
- 19. Сеть Петри : Пример моделирования процесса Оглавление Фишка из вершины b1 прошла переход и исчезла, а
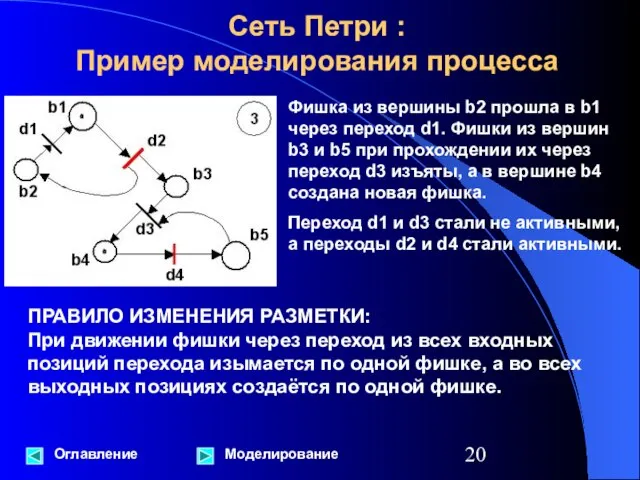
- 20. Сеть Петри : Пример моделирования процесса Оглавление Фишка из вершины b2 прошла в b1 через переход
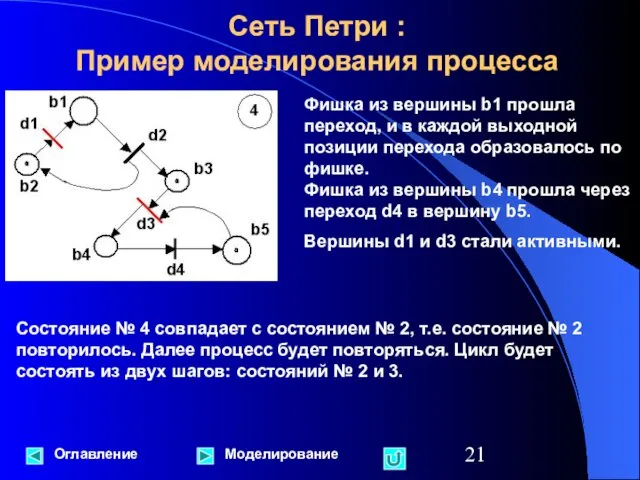
- 21. Сеть Петри : Пример моделирования процесса Оглавление Фишка из вершины b1 прошла переход, и в каждой
- 22. про
- 23. Начало справки Начало 1 кадр
- 24. Обычная страница справки Начало 1 кадр
- 25. Заключительная страница справки Начало 1 кадр Следующий параграф
- 27. Скачать презентацию
Тупики
ОГЛАВЛЕНИЕ
Понятие тупика
Средства обнаружения тупиков
Модель Холта
Сеть Петри
Модель пространства состояний
Примеры
Тупики
ОГЛАВЛЕНИЕ
Понятие тупика
Средства обнаружения тупиков
Модель Холта
Сеть Петри
Модель пространства состояний
Примеры
Понятие тупика
Оглавление
Тупик – состояние вычислительной системы, в котором два и более
Понятие тупика
Оглавление
Тупик – состояние вычислительной системы, в котором два и более
Модель Холта: Типы ресурсов
Оглавление
Разделение ресурсов – предпосылка появления тупиков.
РАЗДЕЛЯЕМЫЕ РЕСУРСЫ
Повторно
используемые
Модель Холта: Типы ресурсов
Оглавление
Разделение ресурсов – предпосылка появления тупиков.
РАЗДЕЛЯЕМЫЕ РЕСУРСЫ
Повторно используемые
Модель Холта: Моделирование
Оглавление
Описание текущего состояния:
имеется два процесса ПР1 и ПР2;
имеются ресурсы
Модель Холта: Моделирование
Оглавление
Описание текущего состояния:
имеется два процесса ПР1 и ПР2;
имеются ресурсы
Сеть Петри: Понятие
Оглавление
Сеть Петри – средство графического и аналитического моделирования различных
Сеть Петри: Понятие
Оглавление
Сеть Петри – средство графического и аналитического моделирования различных
Сеть Петри :
Графическое представление
Оглавление
Сеть состоит из:
• вершин-позиций b1, …,
Сеть Петри :
Графическое представление
Оглавление
Сеть состоит из: • вершин-позиций b1, …,
Сеть Петри :
Пример моделирования процесса
Оглавление
Все переходы пассивны кроме d2.
Переход d2
Сеть Петри :
Пример моделирования процесса
Оглавление
Все переходы пассивны кроме d2. Переход d2
Сеть Петри: Математическое описание
Оглавление
P = (B, D, I, O, M)
где P
Сеть Петри: Математическое описание
Оглавление
P = (B, D, I, O, M)
где P
Сеть Петри:
Решаемые задачи и недостатки
Оглавление
С помощью сетей Петри решаются следующие
Сеть Петри:
Решаемые задачи и недостатки
Оглавление
С помощью сетей Петри решаются следующие
Модель пространства состояний
Оглавление
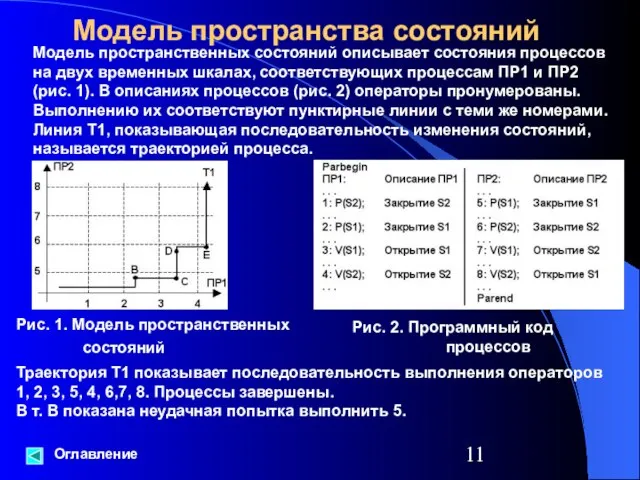
Модель пространственных состояний описывает состояния процессов на двух временных
Модель пространства состояний
Оглавление
Модель пространственных состояний описывает состояния процессов на двух временных
Исходные данные
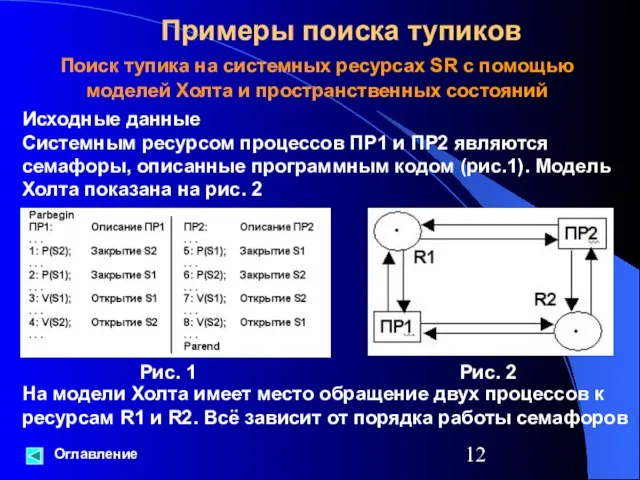
Системным ресурсом процессов ПР1 и ПР2 являются семафоры, описанные программным
Исходные данные Системным ресурсом процессов ПР1 и ПР2 являются семафоры, описанные программным
Примеры поиска тупиков
Оглавление
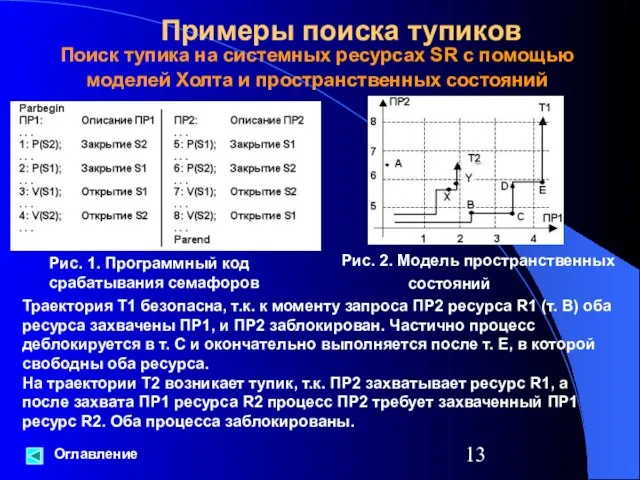
Поиск тупика на системных ресурсах SR с помощью моделей
Примеры поиска тупиков
Оглавление
Поиск тупика на системных ресурсах SR с помощью моделей
Условия возникновения тупика
Оглавление
Для появления тупиков должны одновременно выполняться четыре условия:
взаимное исключение
Условия возникновения тупика
Оглавление
Для появления тупиков должны одновременно выполняться четыре условия:
взаимное исключение
Тупик
Оглавление
Тупик проявляется отсутствием реакции системы на управляющие сигналы, возможности ввода и
Тупик
Оглавление
Тупик проявляется отсутствием реакции системы на управляющие сигналы, возможности ввода и
Тупик
Оглавление
Тупик проявляется отсутствием реакции системы на управляющие сигналы, возможности ввода и
Тупик
Оглавление
Тупик проявляется отсутствием реакции системы на управляющие сигналы, возможности ввода и
Тупик
Оглавление
Тупик проявляется отсутствием реакции системы на управляющие сигналы, возможности ввода и
Тупик
Оглавление
Тупик проявляется отсутствием реакции системы на управляющие сигналы, возможности ввода и
СПРАВОЧНАЯ
СИСТЕМА
СПРАВОЧНАЯ
СИСТЕМА
Сеть Петри :
Пример моделирования процесса
Оглавление
Фишка из вершины b1 прошла переход
Сеть Петри :
Пример моделирования процесса
Оглавление
Фишка из вершины b1 прошла переход
Сеть Петри :
Пример моделирования процесса
Оглавление
Фишка из вершины b2 прошла в
Сеть Петри :
Пример моделирования процесса
Оглавление
Фишка из вершины b2 прошла в
Сеть Петри :
Пример моделирования процесса
Оглавление
Фишка из вершины b1 прошла переход,
Сеть Петри :
Пример моделирования процесса
Оглавление
Фишка из вершины b1 прошла переход,
про
про
Начало справки
Начало
1 кадр
Начало справки
Начало
1 кадр
Обычная страница справки
Начало
1 кадр
Обычная страница справки
Начало
1 кадр
Заключительная страница справки
Начало
1 кадр
Следующий параграф
Заключительная страница справки
Начало
1 кадр
Следующий параграф
 Структура вооруженных сил России
Структура вооруженных сил России  DOI Digital Object Identifier
DOI Digital Object Identifier Обзор методов оптимизации
Обзор методов оптимизации Design Concepts. Chapter 8
Design Concepts. Chapter 8 Телевизионная журналистика
Телевизионная журналистика Реализация основных и дополнительных общеобразовательных программ в сетевой форме
Реализация основных и дополнительных общеобразовательных программ в сетевой форме Файловая система
Файловая система Теория рефлексивных игр
Теория рефлексивных игр Социальная сеть групповой работы по НИОКР проектам
Социальная сеть групповой работы по НИОКР проектам Моделирование как метод познания. Виды информационных моделей и их назначение
Моделирование как метод познания. Виды информационных моделей и их назначение Импортозамещение. Инфраструктурное ПО на замену
Импортозамещение. Инфраструктурное ПО на замену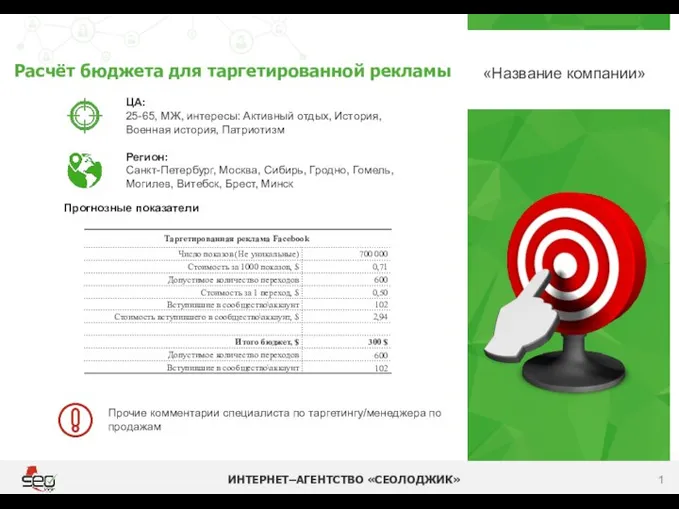 Раcчёт бюджета для таргетированной рекламы
Раcчёт бюджета для таргетированной рекламы Дизайн современной газеты
Дизайн современной газеты Annual Reviews, инструкция
Annual Reviews, инструкция Бриф на форму записи
Бриф на форму записи Лекции 7 – 8. Оператор вызова функций
Лекции 7 – 8. Оператор вызова функций Библиографические основы научных исследований
Библиографические основы научных исследований Информационные системы
Информационные системы Презентация Носители информации
Презентация Носители информации Формы для ввода и редактирования данных
Формы для ввода и редактирования данных Сетевые удаленные ресурсы (СУР) в библиотеках
Сетевые удаленные ресурсы (СУР) в библиотеках Информационные жанры журналистики
Информационные жанры журналистики Всемирная компьютерная сеть интернет. IP-адрес
Всемирная компьютерная сеть интернет. IP-адрес Источники Aviation Data
Источники Aviation Data Современный урок информатики в основной школе с учетом требований ФГОС
Современный урок информатики в основной школе с учетом требований ФГОС Типы баз данных (иерархические, сетевые, реляционные)
Типы баз данных (иерархические, сетевые, реляционные) Web-камера
Web-камера Двоичное кодирование
Двоичное кодирование