- Проектная деятельность. Проект “Робокар”

Содержание
- 2. ЦЕЛЬ И ЗАДАЧИ Цель проекта: Изучение технологий беспилотного движения и модификация БПТС KIA ProCeed для участия
- 3. РОБОКРОСС «РОБОКРОСС – 2022» – это ежегодные соревнования, включающие испытания мобильных робототехнических систем – беспилотных транспортных
- 4. ЗАДАНИЯ РОБОКРОСС - Параллельная парковка, - Перпендикулярная парковка задним ходом, - Распознавание дорожных знаков и сигналов
- 5. ОБСЛЕДОВАНИЕ ЛОКАЛЬНЫХ СЕТЕЙ ПРОЕКТА ① Отсутствие локальной сети. Соединение по COM-порту. Удалось восстановить по файлам программ
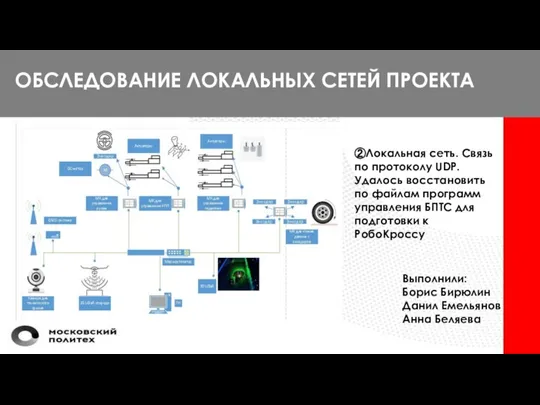
- 6. ОБСЛЕДОВАНИЕ ЛОКАЛЬНЫХ СЕТЕЙ ПРОЕКТА ②Локальная сеть. Связь по протоколу UDP. Удалось восстановить по файлам программ управления
- 7. СХЕМА РАЗРАБАТЫВАЕМОЙ ЛОКАЛЬНОЙ СЕТИ БПТС
- 8. Разработка СУП(Системы управления педалями) Выполнил: Вячеслав Крохалев
- 9. РАЗРАБОТКА КОРОБА Выполнил: Степан Кошкин, Сергей Воронин
- 10. Разработка системы управления КПП Выполнил: Олжас Куспаков
- 11. ОБСЛЕДОВАНИЕ ПРОГРАММЫ УПРАВЛЕНИЯ И РАЗРАБОТКА НОВОЙ ВЕРСИИ
- 13. Скачать презентацию
ЦЕЛЬ И ЗАДАЧИ
Цель проекта:
Изучение технологий беспилотного движения и модификация БПТС
ЦЕЛЬ И ЗАДАЧИ
Цель проекта:
Изучение технологий беспилотного движения и модификация БПТС
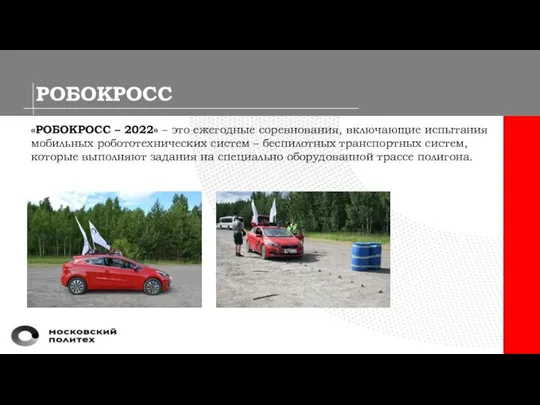
РОБОКРОСС
«РОБОКРОСС – 2022» – это ежегодные соревнования, включающие испытания мобильных робототехнических
РОБОКРОСС
«РОБОКРОСС – 2022» – это ежегодные соревнования, включающие испытания мобильных робототехнических
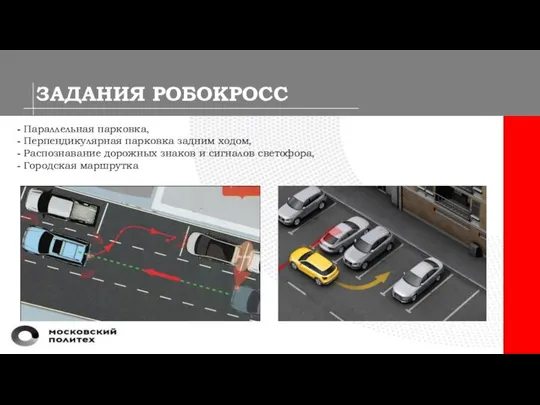
ЗАДАНИЯ РОБОКРОСС
- Параллельная парковка,
- Перпендикулярная парковка задним ходом,
- Распознавание дорожных знаков
ЗАДАНИЯ РОБОКРОСС
- Параллельная парковка,
- Перпендикулярная парковка задним ходом,
- Распознавание дорожных знаков
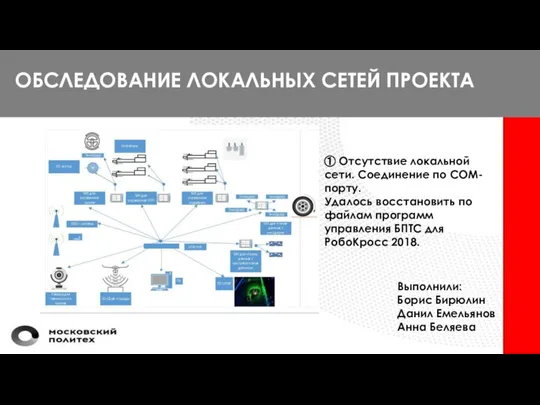
ОБСЛЕДОВАНИЕ ЛОКАЛЬНЫХ СЕТЕЙ ПРОЕКТА
① Отсутствие локальной сети. Соединение по COM-порту.
Удалось восстановить
ОБСЛЕДОВАНИЕ ЛОКАЛЬНЫХ СЕТЕЙ ПРОЕКТА
① Отсутствие локальной сети. Соединение по COM-порту.
Удалось восстановить
ОБСЛЕДОВАНИЕ ЛОКАЛЬНЫХ СЕТЕЙ ПРОЕКТА
②Локальная сеть. Связь по протоколу UDP.
Удалось восстановить по
ОБСЛЕДОВАНИЕ ЛОКАЛЬНЫХ СЕТЕЙ ПРОЕКТА
②Локальная сеть. Связь по протоколу UDP.
Удалось восстановить по

СХЕМА РАЗРАБАТЫВАЕМОЙ ЛОКАЛЬНОЙ СЕТИ БПТС
СХЕМА РАЗРАБАТЫВАЕМОЙ ЛОКАЛЬНОЙ СЕТИ БПТС
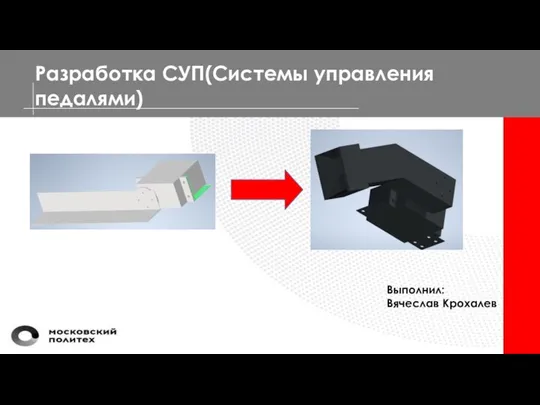
Разработка СУП(Системы управления педалями)
Выполнил:
Вячеслав Крохалев
Разработка СУП(Системы управления педалями)
Выполнил:
Вячеслав Крохалев
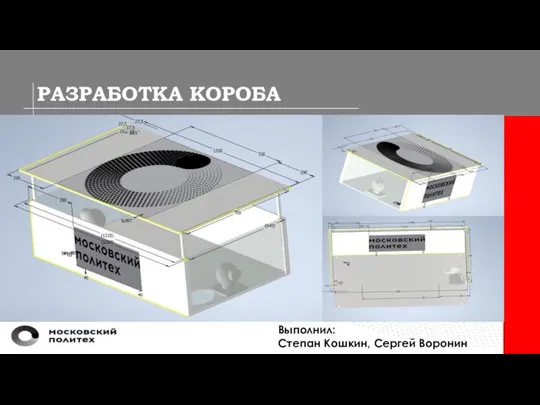
РАЗРАБОТКА КОРОБА
Выполнил:
Степан Кошкин, Сергей Воронин
РАЗРАБОТКА КОРОБА
Выполнил:
Степан Кошкин, Сергей Воронин
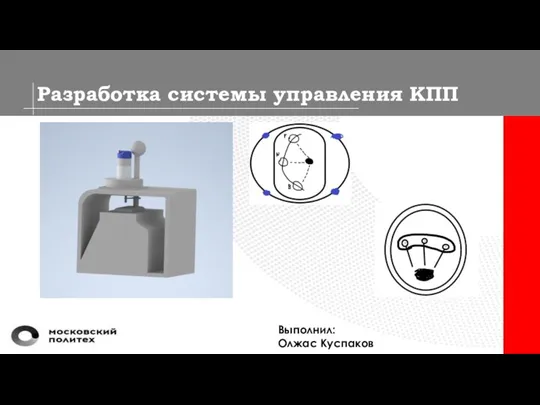
Разработка системы управления КПП
Выполнил:
Олжас Куспаков
Разработка системы управления КПП
Выполнил:
Олжас Куспаков
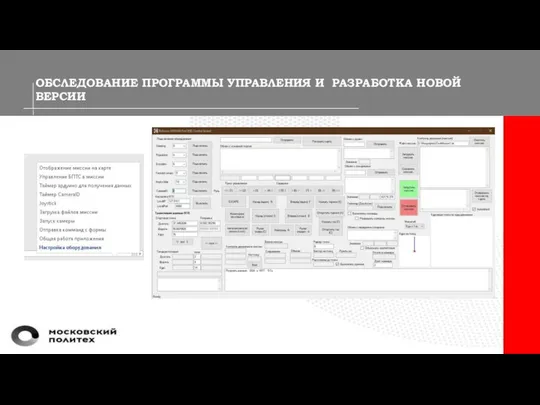
ОБСЛЕДОВАНИЕ ПРОГРАММЫ УПРАВЛЕНИЯ И РАЗРАБОТКА НОВОЙ ВЕРСИИ
ОБСЛЕДОВАНИЕ ПРОГРАММЫ УПРАВЛЕНИЯ И РАЗРАБОТКА НОВОЙ ВЕРСИИ
 Алгоритм с ветвлениями или разветвляющийся
Алгоритм с ветвлениями или разветвляющийся Подготовка макета к печати, требования. Орнамент линейный
Подготовка макета к печати, требования. Орнамент линейный Системы счисления. Математические основы информатики. (8 класс)
Системы счисления. Математические основы информатики. (8 класс) Разработка электронного портфолио по дисциплине История и общество
Разработка электронного портфолио по дисциплине История и общество Основы программирования на языке Пролог
Основы программирования на языке Пролог Значение переменной b после выполнения фрагмента алгоритма
Значение переменной b после выполнения фрагмента алгоритма Разработка АСОИ учёта основных средств завода Электродвигатель
Разработка АСОИ учёта основных средств завода Электродвигатель Презентация "Компьютер" - скачать презентации по Информатике
Презентация "Компьютер" - скачать презентации по Информатике Файлы и файловые структуры
Файлы и файловые структуры Двумерный массив. Занятие 10, 11
Двумерный массив. Занятие 10, 11 Библиотека МГУ
Библиотека МГУ Архитектура компьютера. Внешние устройства. Виды программного обеспечения компьютера
Архитектура компьютера. Внешние устройства. Виды программного обеспечения компьютера Арбитраж трафика через тематические аккаунты
Арбитраж трафика через тематические аккаунты Презентация на тему Основы работы с файловым менеджером total comander
Презентация на тему Основы работы с файловым менеджером total comander Персональные данные работников
Персональные данные работников Представление данных в памяти компьютера. Двоичное кодирование
Представление данных в памяти компьютера. Двоичное кодирование Презентация на тему : «Модели» Выполнила ученица 10 класса МОУ СОШ № 9 Слесарева Алла
Презентация на тему : «Модели» Выполнила ученица 10 класса МОУ СОШ № 9 Слесарева Алла http://www.apkpro.ru
http://www.apkpro.ru Режимы работы PowerPoint
Режимы работы PowerPoint Исследование эффективности механизмов защиты электронного документооборота в системе 1c
Исследование эффективности механизмов защиты электронного документооборота в системе 1c Система управления версиями Git, Github аnd Github Flow
Система управления версиями Git, Github аnd Github Flow Моделирование и формализация. Информация и информационные процессы
Моделирование и формализация. Информация и информационные процессы Всероссийская олимпиада школьников 2019-2020 учебного года
Всероссийская олимпиада школьников 2019-2020 учебного года Топологии компьютерных сетей
Топологии компьютерных сетей Разработка информационно-программного комплекса выявления плагиата в курсовых проектах по технологиям БД
Разработка информационно-программного комплекса выявления плагиата в курсовых проектах по технологиям БД РАБОТА В СЕТИ ИНТЕРНЕТ Учебный курс
РАБОТА В СЕТИ ИНТЕРНЕТ Учебный курс  531764
531764 Беспроводная связь. Интернет.
Беспроводная связь. Интернет.