- Математическое моделирование автоматических систем регулирования

Содержание
- 2. Математическое моделирование АСР В соответствии с этой концепцией изменение во времени любых переменных, в том числе
- 3. Математическое моделирование АСР Поскольку при регулировании такие отклонения невелики, то для математического описания возмущенного движения пригодны
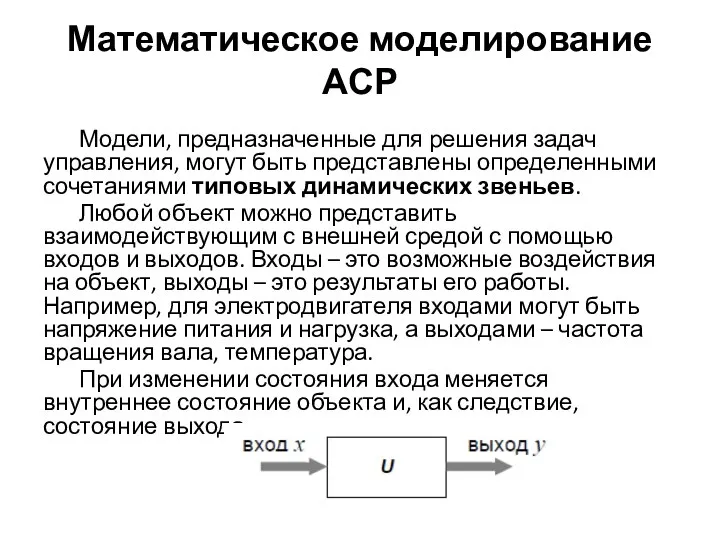
- 4. Математическое моделирование АСР Модели, предназначенные для решения задач управления, могут быть представлены определенными сочетаниями типовых динамических
- 5. Математическое моделирование АСР Типовое динамическое звено – это условное представление одной математической зависимости, с помощью которой
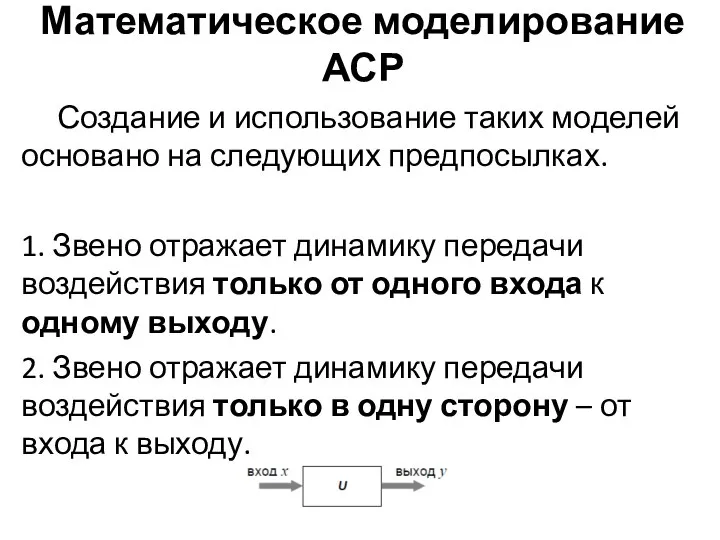
- 6. Математическое моделирование АСР Создание и использование таких моделей основано на следующих предпосылках. 1. Звено отражает динамику
- 7. Математическое моделирование АСР 3. Если необходимо учитывать влияние выхода на вход, как это обычно бывает, то
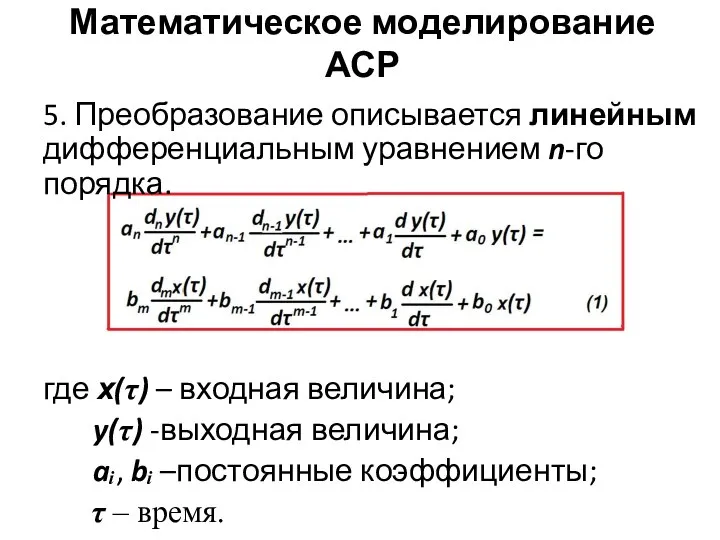
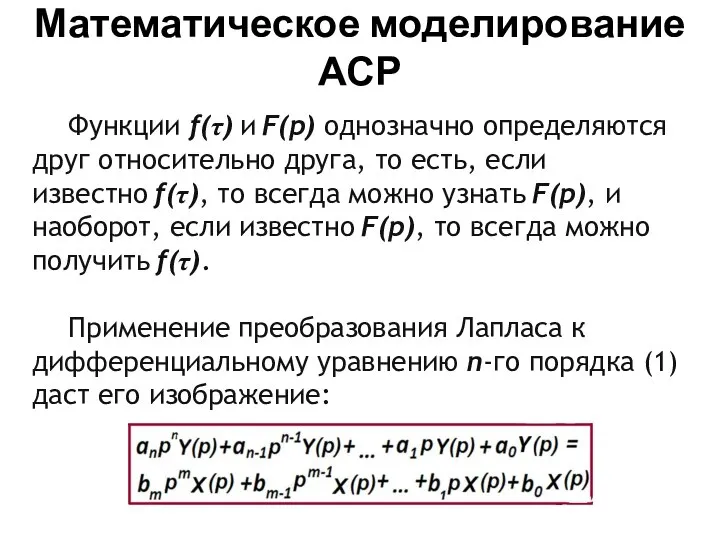
- 8. Математическое моделирование АСР 5. Преобразование описывается линейным дифференциальным уравнением n-го порядка. где х(τ) – входная величина;
- 9. Математическое моделирование АСР Система расчленяется на отдельные динамические звенья так, чтобы они могли описывать переходные процессы
- 10. Математическое моделирование АСР Наиболее широко используются следующие типовые динамические звенья: Пропорциональное (усилительное) Интегрирующее Идеальное дифференцирующее Реальное
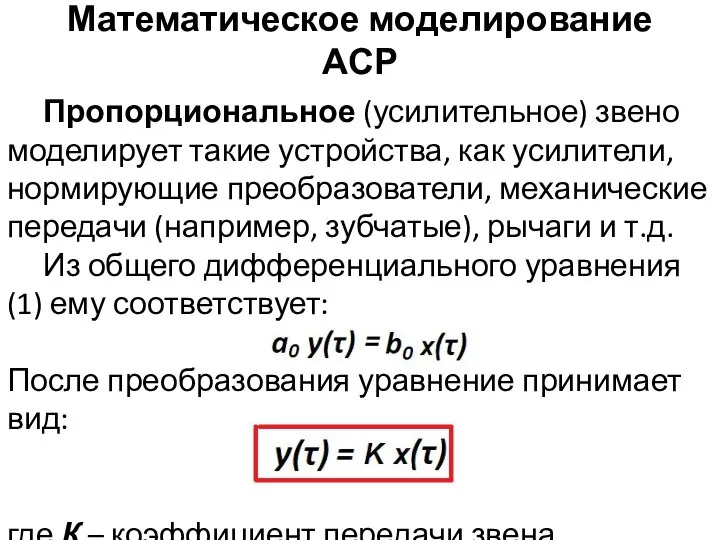
- 11. Математическое моделирование АСР Пропорциональное (усилительное) звено моделирует такие устройства, как усилители, нормирующие преобразователи, механические передачи (например,
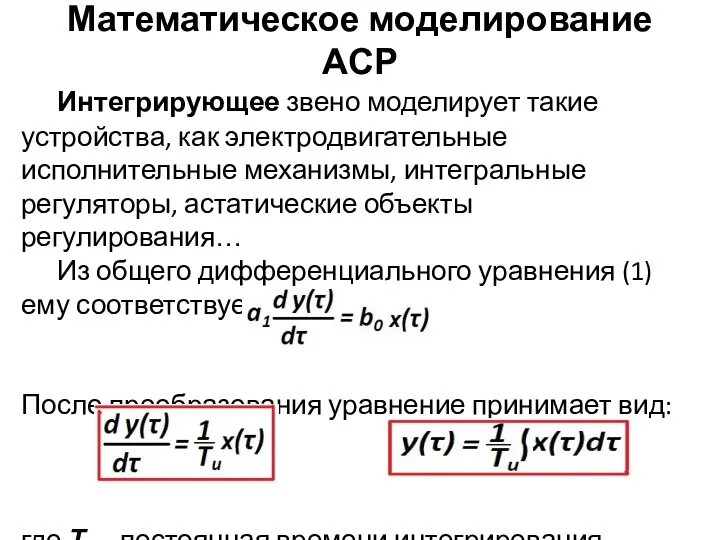
- 12. Математическое моделирование АСР Интегрирующее звено моделирует такие устройства, как электродвигательные исполнительные механизмы, интегральные регуляторы, астатические объекты
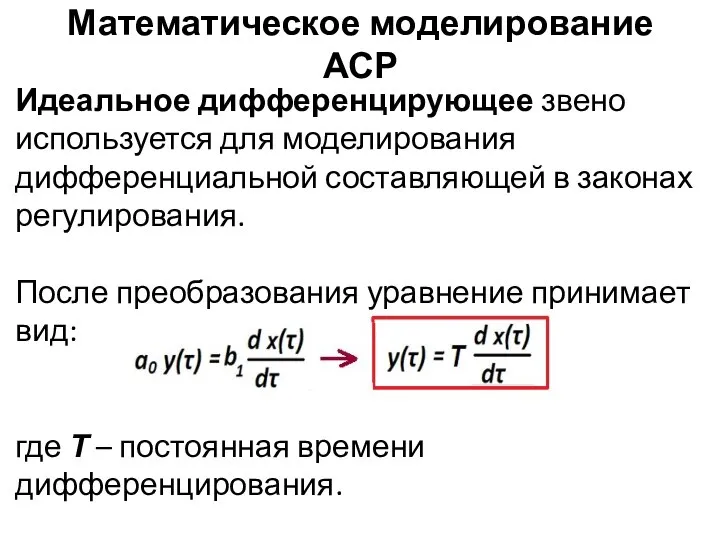
- 13. Математическое моделирование АСР Идеальное дифференцирующее звено используется для моделирования дифференциальной составляющей в законах регулирования. После преобразования
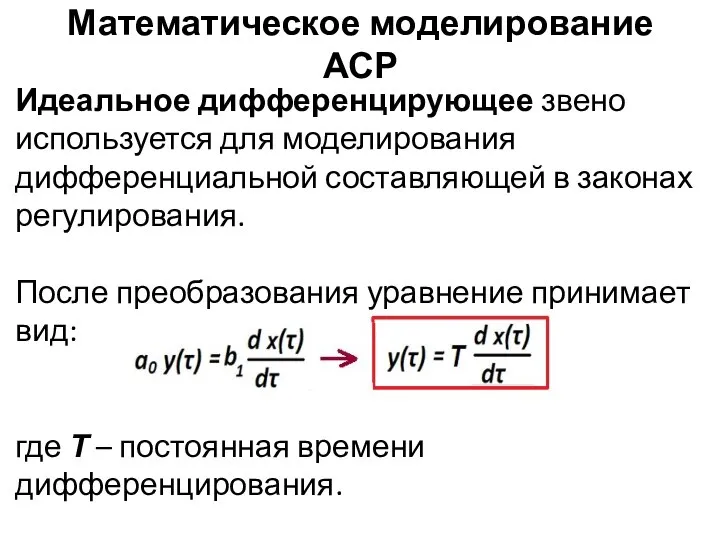
- 14. Математическое моделирование АСР Идеальное дифференцирующее звено используется для моделирования дифференциальной составляющей в законах регулирования. После преобразования
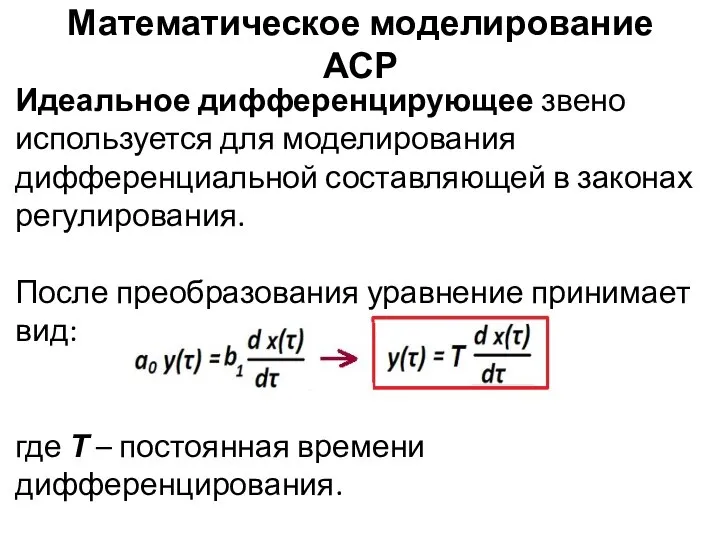
- 15. Математическое моделирование АСР Идеальное дифференцирующее звено используется для моделирования дифференциальной составляющей в законах регулирования. После преобразования
- 16. Математическое моделирование АСР Инерционное (апериодическое) звено 1-го порядка используется для моделирования объектов с самовыравниванием, некоторых датчиков,
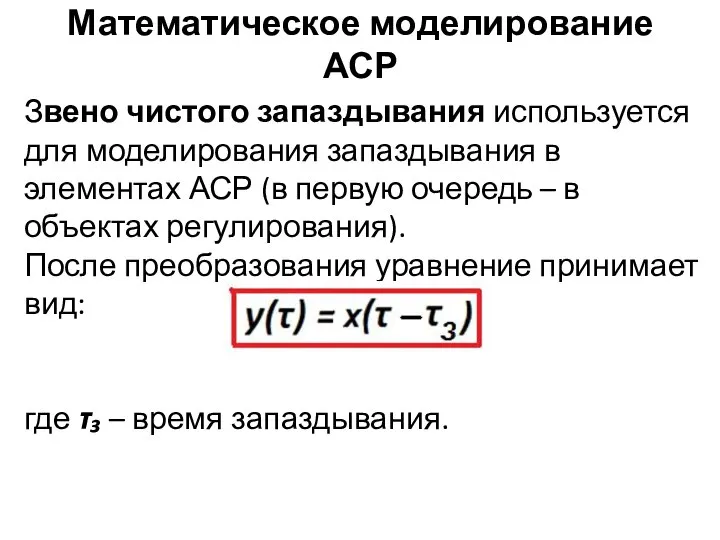
- 17. Математическое моделирование АСР Звено чистого запаздывания используется для моделирования запаздывания в элементах АСР (в первую очередь
- 18. Математическое моделирование АСР Использование преобразования Лапласа для моделирования ТДЗ и систем Преобразование Лапласа - интегральное преобразование,
- 19. Математическое моделирование АСР Функции f(τ) и F(p) однозначно определяются друг относительно друга, то есть, если известно
- 20. Математическое моделирование АСР Понятие о передаточной функции. Передаточные функции основных ТДЗ Из уравнения (2) можно выразить
- 21. Математическое моделирование АСР Передаточная функция является динамической характеристикой того звена (комбинации звеньев, системы), к которой она
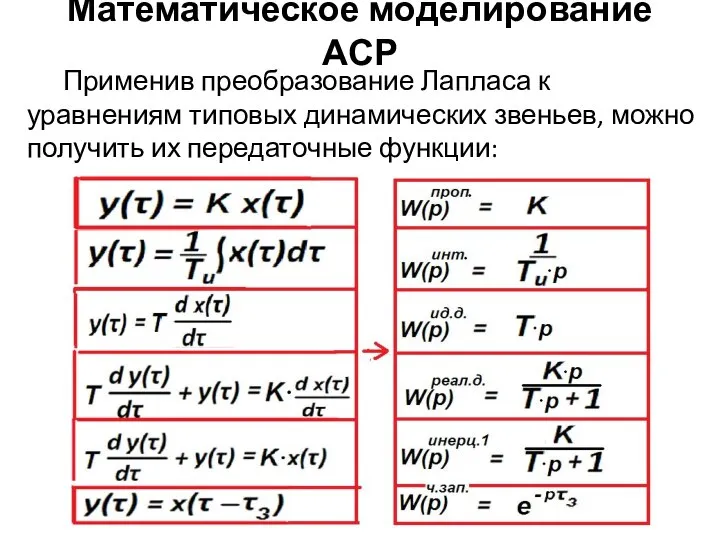
- 22. Математическое моделирование АСР Применив преобразование Лапласа к уравнениям типовых динамических звеньев, можно получить их передаточные функции:
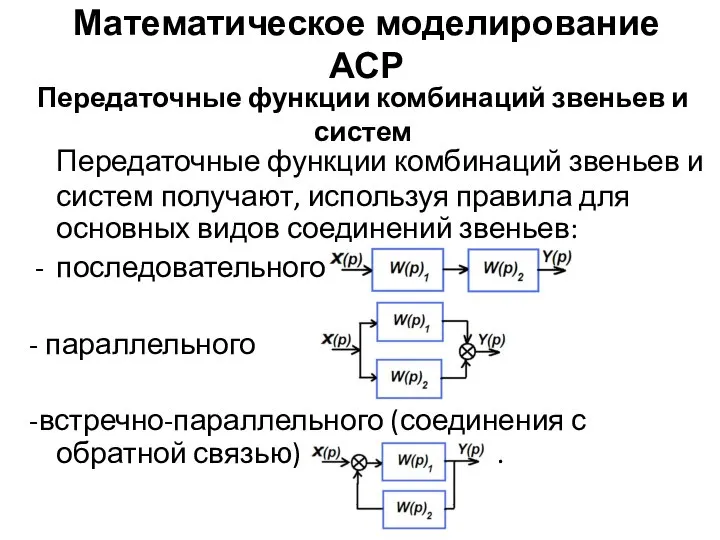
- 23. Математическое моделирование АСР Передаточные функции комбинаций звеньев и систем получают, используя правила для основных видов соединений
- 24. Математическое моделирование АСР Передаточная функция при последовательном соединении равна произведению передаточных функций звеньев: Для n звеньев:
- 25. Математическое моделирование АСР Передаточная функция при параллельном соединении равна сумме передаточных функций звеньев: Для n звеньев:
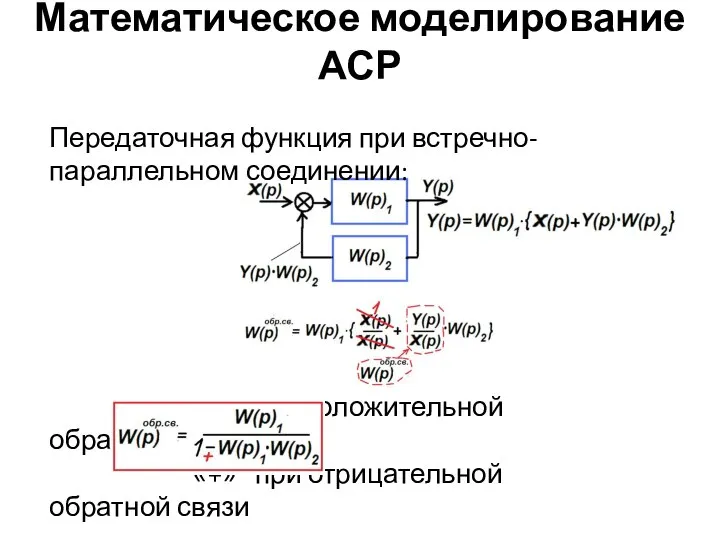
- 26. Математическое моделирование АСР Передаточная функция при встречно-параллельном соединении: «-» при положительной обратной связи «+» при отрицательной
- 27. Математическое моделирование АСР Передаточные функции регуляторов: пропорционального W(p) = Кр интегрального W(p) = 1/(Tи∙p) пропорционально-интегрального W(p)
- 29. Скачать презентацию
Математическое моделирование АСР
В соответствии с этой концепцией изменение во времени любых
Математическое моделирование АСР
В соответствии с этой концепцией изменение во времени любых

Математическое моделирование АСР
Поскольку при регулировании такие отклонения невелики, то для математического
Математическое моделирование АСР
Поскольку при регулировании такие отклонения невелики, то для математического
Математическое моделирование АСР
Модели, предназначенные для решения задач управления, могут быть представлены
Математическое моделирование АСР
Модели, предназначенные для решения задач управления, могут быть представлены

Математическое моделирование АСР
Типовое динамическое звено – это условное представление одной математической
Математическое моделирование АСР
Типовое динамическое звено – это условное представление одной математической
Математическое моделирование АСР
Создание и использование таких моделей основано на следующих предпосылках.
1.
Математическое моделирование АСР
Создание и использование таких моделей основано на следующих предпосылках.
1.
Математическое моделирование АСР
3. Если необходимо учитывать влияние выхода на вход, как это
Математическое моделирование АСР
3. Если необходимо учитывать влияние выхода на вход, как это
Математическое моделирование АСР
5. Преобразование описывается линейным дифференциальным уравнением n-го порядка.
где х(τ)
Математическое моделирование АСР
5. Преобразование описывается линейным дифференциальным уравнением n-го порядка.
где х(τ)
Математическое моделирование АСР
Система расчленяется на отдельные динамические звенья так, чтобы они
Математическое моделирование АСР
Система расчленяется на отдельные динамические звенья так, чтобы они

Математическое моделирование АСР
Наиболее широко используются следующие типовые динамические звенья:
Пропорциональное (усилительное)
Интегрирующее
Идеальное дифференцирующее
Реальное
Математическое моделирование АСР
Наиболее широко используются следующие типовые динамические звенья:
Пропорциональное (усилительное)
Интегрирующее
Идеальное дифференцирующее
Реальное
Математическое моделирование АСР
Пропорциональное (усилительное) звено моделирует такие устройства, как усилители, нормирующие
Математическое моделирование АСР
Пропорциональное (усилительное) звено моделирует такие устройства, как усилители, нормирующие
Математическое моделирование АСР
Интегрирующее звено моделирует такие устройства, как электродвигательные исполнительные механизмы,
Математическое моделирование АСР
Интегрирующее звено моделирует такие устройства, как электродвигательные исполнительные механизмы,
Математическое моделирование АСР
Идеальное дифференцирующее звено используется для моделирования дифференциальной составляющей в
Математическое моделирование АСР
Идеальное дифференцирующее звено используется для моделирования дифференциальной составляющей в
Математическое моделирование АСР
Идеальное дифференцирующее звено используется для моделирования дифференциальной составляющей в
Математическое моделирование АСР
Идеальное дифференцирующее звено используется для моделирования дифференциальной составляющей в
Математическое моделирование АСР
Идеальное дифференцирующее звено используется для моделирования дифференциальной составляющей в
Математическое моделирование АСР
Идеальное дифференцирующее звено используется для моделирования дифференциальной составляющей в

Математическое моделирование АСР
Инерционное (апериодическое) звено 1-го порядка используется для моделирования объектов
Математическое моделирование АСР
Инерционное (апериодическое) звено 1-го порядка используется для моделирования объектов
Математическое моделирование АСР
Звено чистого запаздывания используется для моделирования запаздывания в элементах
Математическое моделирование АСР
Звено чистого запаздывания используется для моделирования запаздывания в элементах

Математическое моделирование АСР
Использование преобразования Лапласа для моделирования ТДЗ и систем
Преобразование Лапласа -
Математическое моделирование АСР
Использование преобразования Лапласа для моделирования ТДЗ и систем
Преобразование Лапласа -
Математическое моделирование АСР
Функции f(τ) и F(p) однозначно определяются друг относительно друга, то есть,
Математическое моделирование АСР
Функции f(τ) и F(p) однозначно определяются друг относительно друга, то есть,

Математическое моделирование АСР
Понятие о передаточной функции. Передаточные функции основных ТДЗ
Из уравнения
Математическое моделирование АСР
Понятие о передаточной функции. Передаточные функции основных ТДЗ
Из уравнения

Математическое моделирование АСР
Передаточная функция является динамической характеристикой того звена (комбинации звеньев,
Математическое моделирование АСР
Передаточная функция является динамической характеристикой того звена (комбинации звеньев,
Математическое моделирование АСР
Применив преобразование Лапласа к уравнениям типовых динамических звеньев, можно
Математическое моделирование АСР
Применив преобразование Лапласа к уравнениям типовых динамических звеньев, можно
Математическое моделирование АСР
Передаточные функции комбинаций звеньев и систем получают, используя правила
Математическое моделирование АСР
Передаточные функции комбинаций звеньев и систем получают, используя правила

Математическое моделирование АСР
Передаточная функция при последовательном соединении равна произведению передаточных функций
Математическое моделирование АСР
Передаточная функция при последовательном соединении равна произведению передаточных функций

Математическое моделирование АСР
Передаточная функция при параллельном соединении равна сумме передаточных функций
Математическое моделирование АСР
Передаточная функция при параллельном соединении равна сумме передаточных функций
Математическое моделирование АСР
Передаточная функция при встречно-параллельном соединении:
«-» при положительной обратной
Математическое моделирование АСР
Передаточная функция при встречно-параллельном соединении:
«-» при положительной обратной

Математическое моделирование АСР
Передаточные функции регуляторов:
пропорционального W(p) = Кр
интегрального W(p)
Математическое моделирование АСР
Передаточные функции регуляторов:
пропорционального W(p) = Кр
интегрального W(p)
 Табличные информационные модели
Табличные информационные модели Тригонометрические уравнения
Тригонометрические уравнения Понятие обратной функции
Понятие обратной функции Письменное умножение двух чисел, оканчивающихся нулями
Письменное умножение двух чисел, оканчивающихся нулями Принак подобия треугольников. Урок 33
Принак подобия треугольников. Урок 33 Нахождение 2 чисел по их сумме и разности (в рыбном царстве). Урок 3
Нахождение 2 чисел по их сумме и разности (в рыбном царстве). Урок 3 Специальные распределения. χ2 -распределение
Специальные распределения. χ2 -распределение Корреляционный анализ. Парная корреляция
Корреляционный анализ. Парная корреляция Таблица умножения. Тренажер
Таблица умножения. Тренажер Параллельные прямые. Игра "Русское лото"
Параллельные прямые. Игра "Русское лото" Сравнение дробей
Сравнение дробей Парабола и ее применение
Парабола и ее применение Смешанные числа
Смешанные числа Координатная прямая
Координатная прямая Сумма углов треугольника
Сумма углов треугольника Таблица умножения и деления на 2
Таблица умножения и деления на 2 Математическая викторина для 5-6 классов
Математическая викторина для 5-6 классов Методы обработки данных и способы их представления в научном исследовании
Методы обработки данных и способы их представления в научном исследовании Умножение чисел с разными знаками
Умножение чисел с разными знаками Объединение множеств
Объединение множеств Число и цифра 5. Состав числа 5. Сложение и вычитание в пределах 5. Пятиугольник
Число и цифра 5. Состав числа 5. Сложение и вычитание в пределах 5. Пятиугольник История чисел
История чисел Решение задач по теме «Правильный многоугольник»
Решение задач по теме «Правильный многоугольник» Треугольники. Подготовка к ОГЭ. Задание 16
Треугольники. Подготовка к ОГЭ. Задание 16 Приведение дробей к общему знаменателю
Приведение дробей к общему знаменателю Построение эскизов кривых в декартовых координатах. (Семинар 3)
Построение эскизов кривых в декартовых координатах. (Семинар 3) Решение игр в смешанных стратегиях
Решение игр в смешанных стратегиях Двугранный угол (ЕГЭ)
Двугранный угол (ЕГЭ)