- Обработка результатов эксперимента. Матричное исчисление

Содержание
- 2. Регрессионный анализ Это статистический метод проверки гипотезы о пригодности модели и значимости коэффициентов. Он основывается на
- 3. Матричные исчисления в многомерной статистике Для нахождения коэффициента регрессии в матричном исчис-лении необходимо решить следующие уравнения:
- 4. Решим матрицу относительно В Умножив обе части равенства на транспонированную матрицу: Получим информационную матрицу Фишера Ее
- 5. Чтобы найти коэффициент уравнения, необходимо, чтобы в левой части получилась единичная матрица, тогда правая часть будет
- 6. Каждый bi определяется по следующей формуле При ортогональном планировании: Аналогичны рассуждения при проверке дисперсии экспериментов
- 7. Ковариация Если ковариация положительна, то с ростом значений одной случайной величины, значения второй имеют тенденцию возрастать,
- 8. КРИТЕРИИ ОПТИМАЛЬНОСТИ ПЛАНОВ
- 9. Требования к матрице ковариаций Построение плана эксперимента можно интерпретировать как выбор строк матрицы х, их числа
- 10. Первая группа 1.1. Ортогональность. а). диагональность матрицы дисперсии – ковариации. б). направление главных осей эллипсоида рассеяния
- 11. 1.4. Е – оптимальные планы (minmax). а). minmax собственного значения матриц дисперсии, ковариации. б). min максимальной
- 12. Вторая группа 2.1. ротатабельность. а). , где ρ - сферическая координата. в). одинаковая точность предсказаний для
- 13. Критерии насыщенности и композиционности плана. Насыщенность плана обеспечивает минимум числа опытов. Минимум задается числом коэффициентов модели.
- 14. ПЛАНЫ ВТОРОГО ПОРЯДКА
- 15. Особенности планов второго порядка При наличии в исследуемой области не более одного экстремума в качестве модели
- 16. Планы типа 3n Планы с числом степеней свободы, достаточным для получения оценок всех коэффициентов данной модели,
- 17. Коэффициенты модели где A, B, C, D – некоторые коэффициенты, взятые из таблицы. Ошибки оценок коэффициентов
- 18. Центральные композиционные планы Планы второго порядка, построенные на базе линейных факторных планов типа 2n добавлением к
- 19. Параметры ортогональных композиционных панов
- 20. Расчет коэффициентов моделей
- 21. Влияние композицоинности плана Если в центре плана поставить не один эксперимент, то может быть определено такое
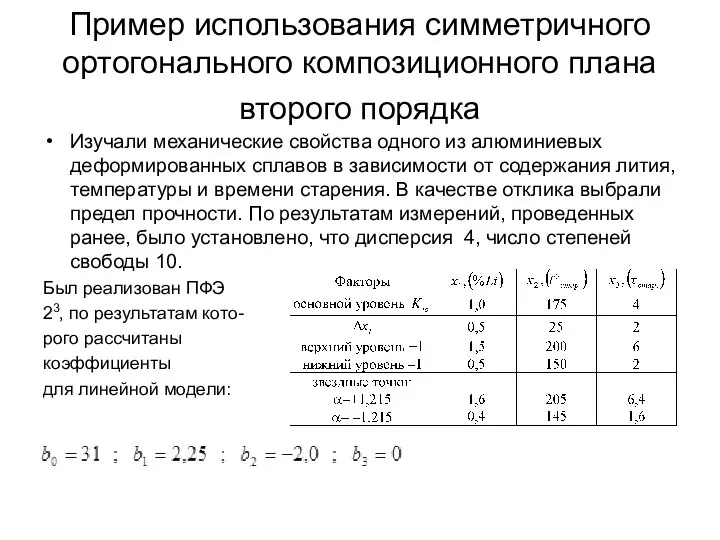
- 22. Пример использования симметричного ортогонального композиционного плана второго порядка Изучали механические свойства одного из алюминиевых деформированных сплавов
- 23. Дисперсия в определении коэффициентов: Дисперсия неадекватности: , где N- количество опытов. K’-количество коэффициентов. Модель не адекватна
- 24. Проведем дополнение модели В таком случае можно дополнить данную модель звездными точками и опытами в центре
- 25. Проводим эксперимент
- 26. По результатам эксперимента, используя коэффициенты рассчитываем коэффициенты регрессии: По критерию Стьюдента: статистически значимыми будут Уравнение регрессии:
- 27. Некомпозиционные планы Для системы с двумя независимыми переменными ротатабельными планами второго порядка будут планы, точки которых
- 28. Планы Хартли и Вестлейка Ортогональные и ротатабельные центральные композиционные планы второго порядка строятся на основе матриц
- 29. звездное плечо определяется по формуле: N0 – число точек в исходном ПФЭ. r – число повторений
- 30. Планы близкие к D-оптимальным Такие планы имеют минимальный объем эллипсоида ошибок оценок коэффициентов модели, однако планы
- 31. Параметры D-оптимальных планов Пример D- оптимального плана на базе плана Хартли при 5 факторах
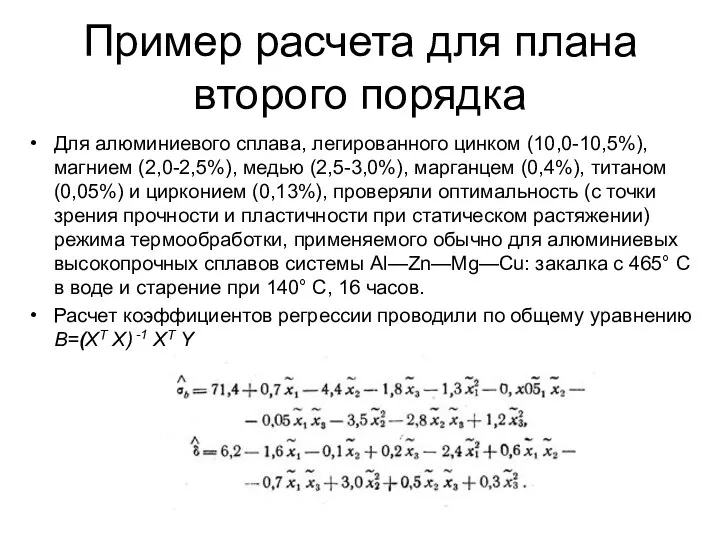
- 32. Пример расчета для плана второго порядка Для алюминиевого сплава, легированного цинком (10,0-10,5%), магнием (2,0-2,5%), медью (2,5-3,0%),
- 33. Матрица исходных данных
- 34. Результаты На поле диаграммы выделены области, соответствующие принятому режиму старения (Л) и режимам, при которых достигаются
- 36. Скачать презентацию
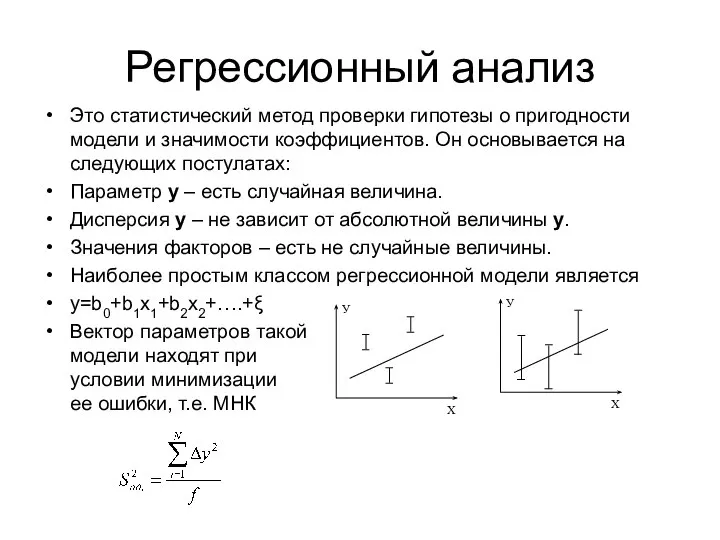
Регрессионный анализ
Это статистический метод проверки гипотезы о пригодности модели и значимости
Регрессионный анализ
Это статистический метод проверки гипотезы о пригодности модели и значимости

Матричные исчисления в многомерной статистике
Для нахождения коэффициента регрессии в матричном исчис-лении
Матричные исчисления в многомерной статистике
Для нахождения коэффициента регрессии в матричном исчис-лении
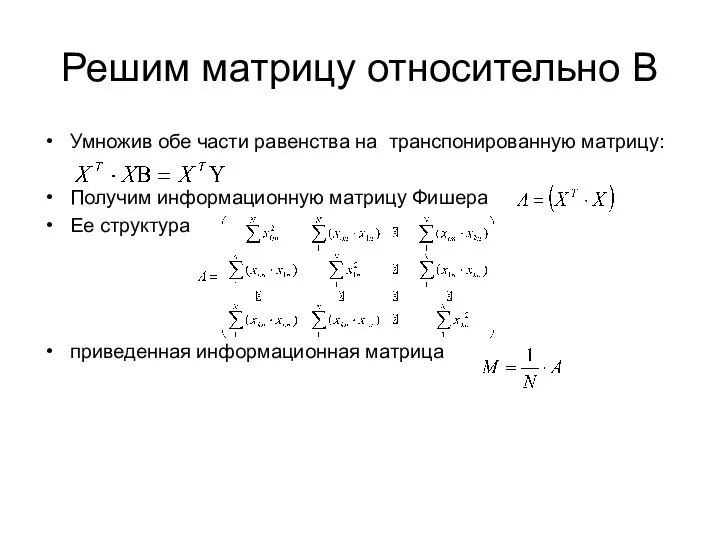
Решим матрицу относительно В
Умножив обе части равенства на транспонированную матрицу:
Получим
Решим матрицу относительно В
Умножив обе части равенства на транспонированную матрицу:
Получим
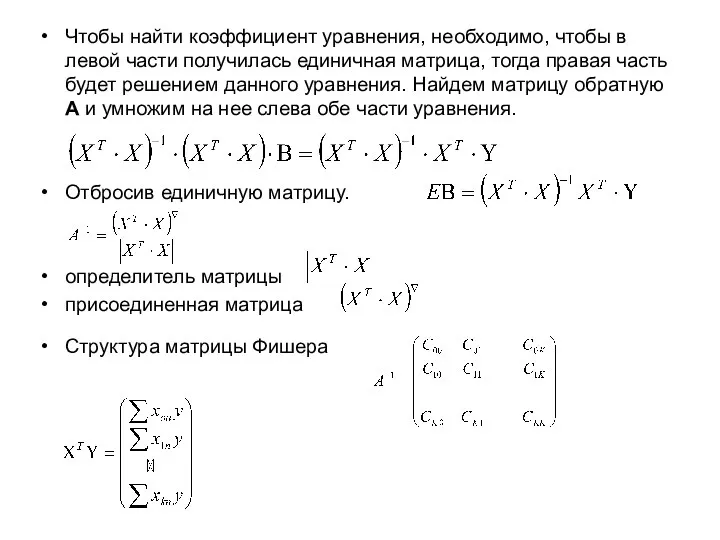
Чтобы найти коэффициент уравнения, необходимо, чтобы в левой части получилась единичная
Чтобы найти коэффициент уравнения, необходимо, чтобы в левой части получилась единичная
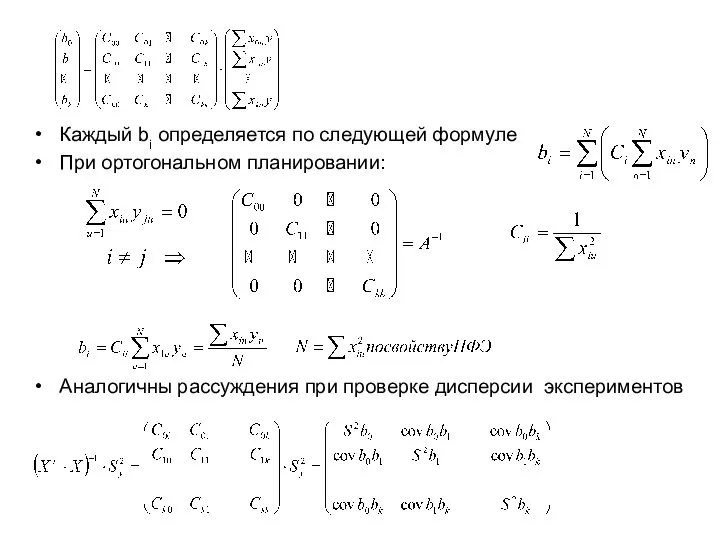
Каждый bi определяется по следующей формуле
При ортогональном планировании:
Аналогичны рассуждения при
При ортогональном планировании:
Аналогичны рассуждения при

Ковариация
Если ковариация положительна, то с ростом значений одной случайной величины, значения
Ковариация
Если ковариация положительна, то с ростом значений одной случайной величины, значения
КРИТЕРИИ ОПТИМАЛЬНОСТИ ПЛАНОВ
КРИТЕРИИ ОПТИМАЛЬНОСТИ ПЛАНОВ
Требования к матрице ковариаций
Построение плана эксперимента можно интерпретировать как выбор строк
Требования к матрице ковариаций
Построение плана эксперимента можно интерпретировать как выбор строк
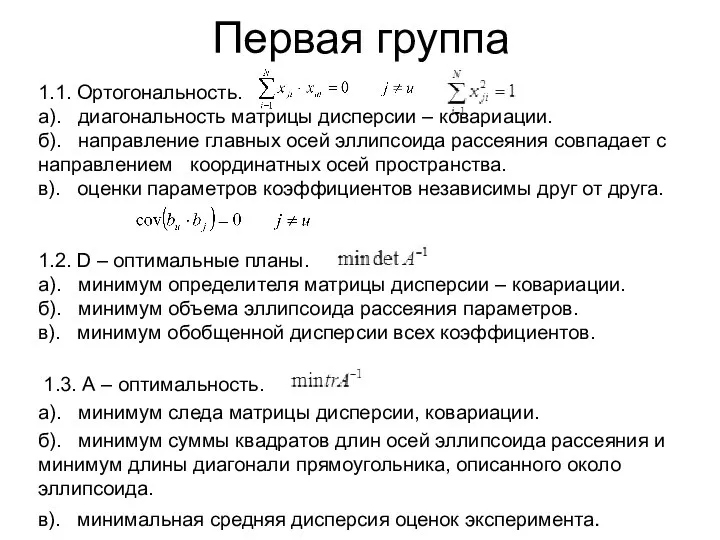
Первая группа
1.1. Ортогональность.
а). диагональность матрицы дисперсии – ковариации.
б). направление главных осей
Первая группа
1.1. Ортогональность.
а). диагональность матрицы дисперсии – ковариации.
б). направление главных осей
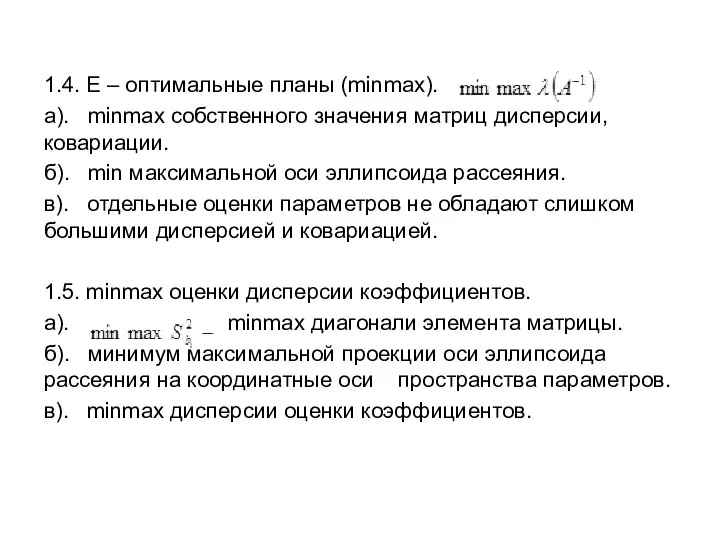
1.4. Е – оптимальные планы (minmax).
а). minmax собственного значения матриц дисперсии,
1.4. Е – оптимальные планы (minmax).
а). minmax собственного значения матриц дисперсии,
Вторая группа
2.1. ротатабельность.
а). , где ρ - сферическая координата.
в). одинаковая точность
Вторая группа
2.1. ротатабельность.
а). , где ρ - сферическая координата.
в). одинаковая точность
Критерии насыщенности и композиционности плана.
Насыщенность плана обеспечивает минимум числа опытов. Минимум
Критерии насыщенности и композиционности плана.
Насыщенность плана обеспечивает минимум числа опытов. Минимум
ПЛАНЫ ВТОРОГО ПОРЯДКА
ПЛАНЫ ВТОРОГО ПОРЯДКА
Особенности планов второго порядка
При наличии в исследуемой области не более одного
Особенности планов второго порядка
При наличии в исследуемой области не более одного
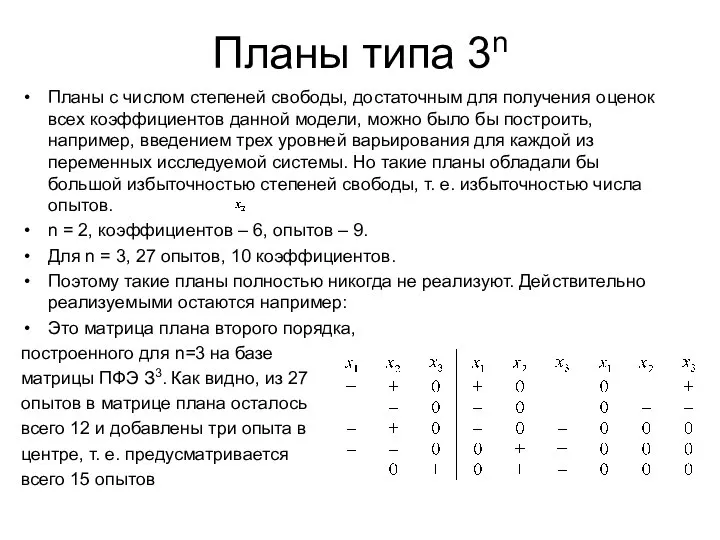
Планы типа 3n
Планы с числом степеней свободы, достаточным для получения оценок
Планы типа 3n
Планы с числом степеней свободы, достаточным для получения оценок
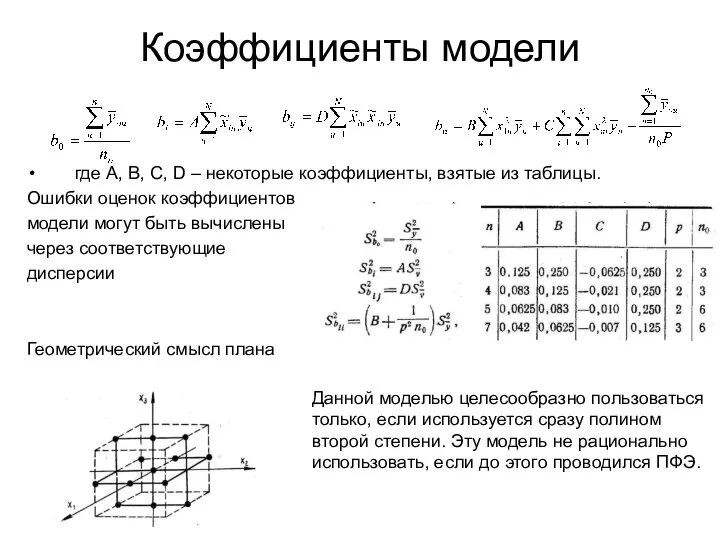
Коэффициенты модели
где A, B, C, D – некоторые коэффициенты, взятые
Коэффициенты модели
где A, B, C, D – некоторые коэффициенты, взятые
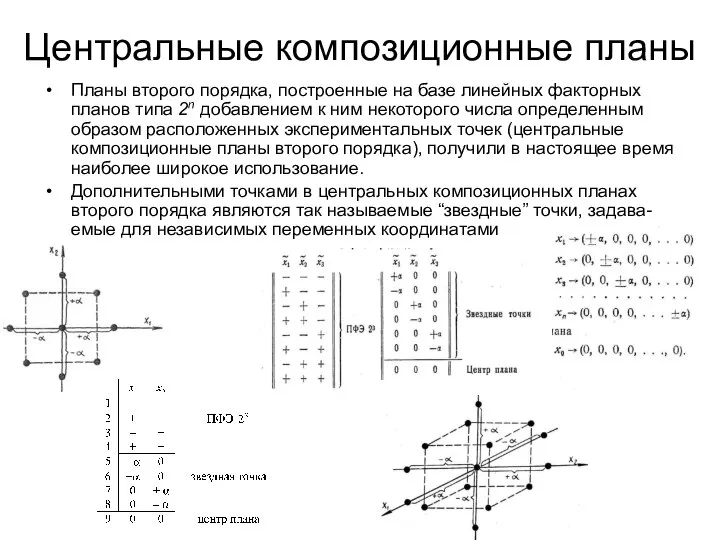
Центральные композиционные планы
Планы второго порядка, построенные на базе линейных факторных планов
Центральные композиционные планы
Планы второго порядка, построенные на базе линейных факторных планов
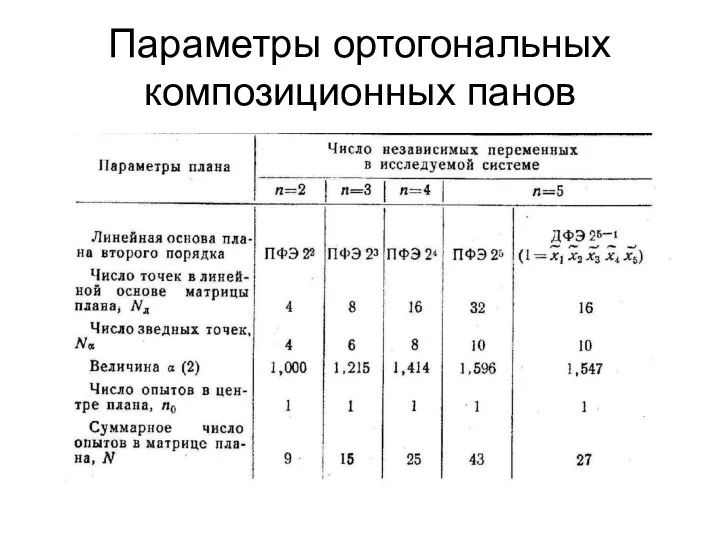
Параметры ортогональных композиционных панов
Параметры ортогональных композиционных панов

Расчет коэффициентов моделей
Расчет коэффициентов моделей
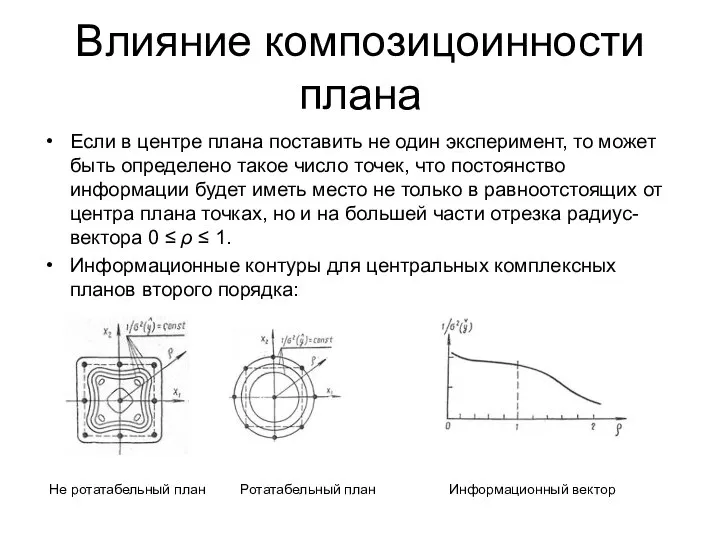
Влияние композицоинности плана
Если в центре плана поставить не один эксперимент,
Влияние композицоинности плана
Если в центре плана поставить не один эксперимент,
Пример использования симметричного ортогонального композиционного плана второго порядка
Изучали механические свойства
Пример использования симметричного ортогонального композиционного плана второго порядка
Изучали механические свойства
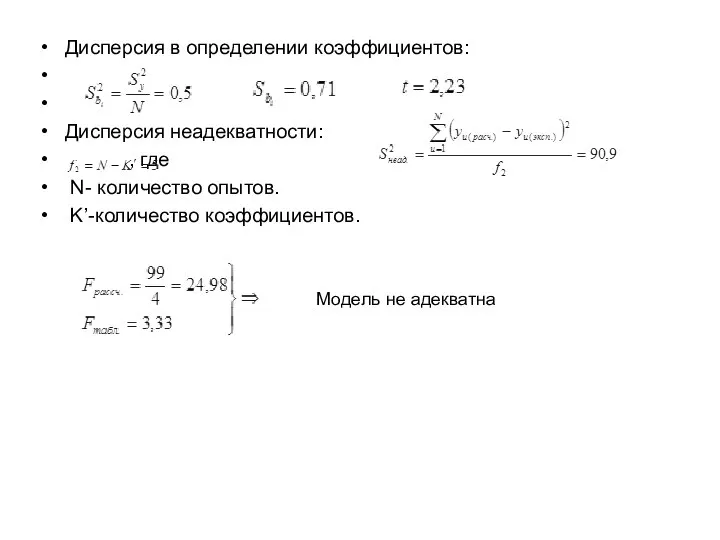
Дисперсия в определении коэффициентов:
Дисперсия неадекватности:
, где
N- количество опытов.
K’-количество
Дисперсия в определении коэффициентов:
Дисперсия неадекватности:
, где
N- количество опытов.
K’-количество
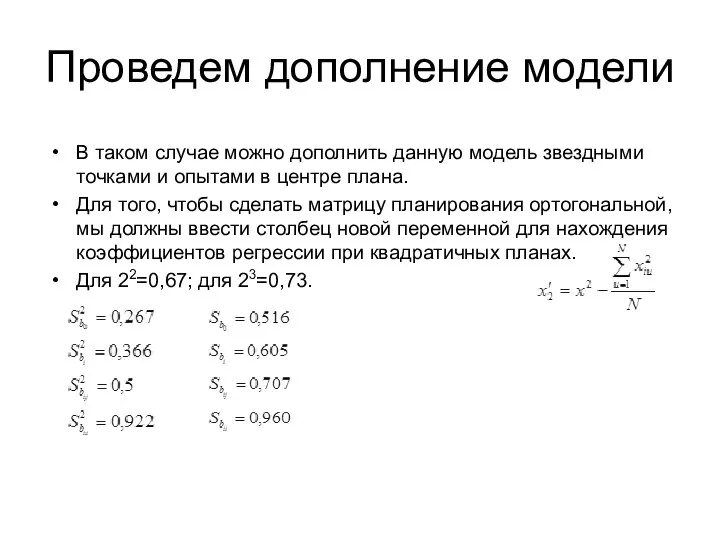
Проведем дополнение модели
В таком случае можно дополнить данную модель звездными точками
Проведем дополнение модели
В таком случае можно дополнить данную модель звездными точками
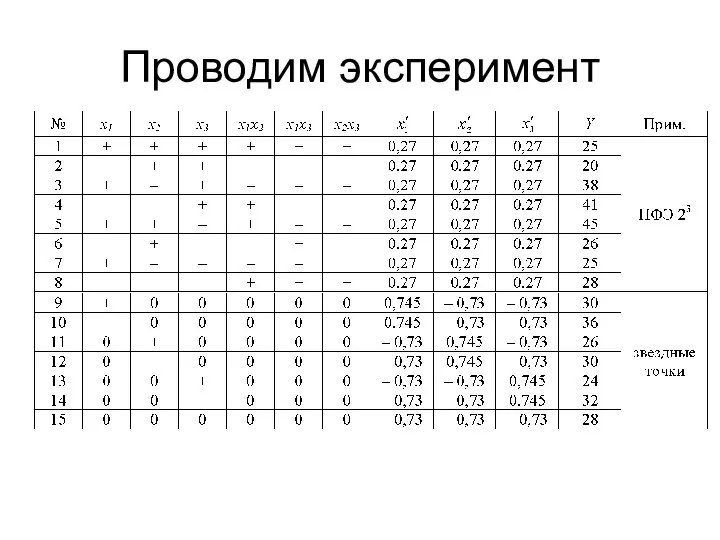
Проводим эксперимент
Проводим эксперимент
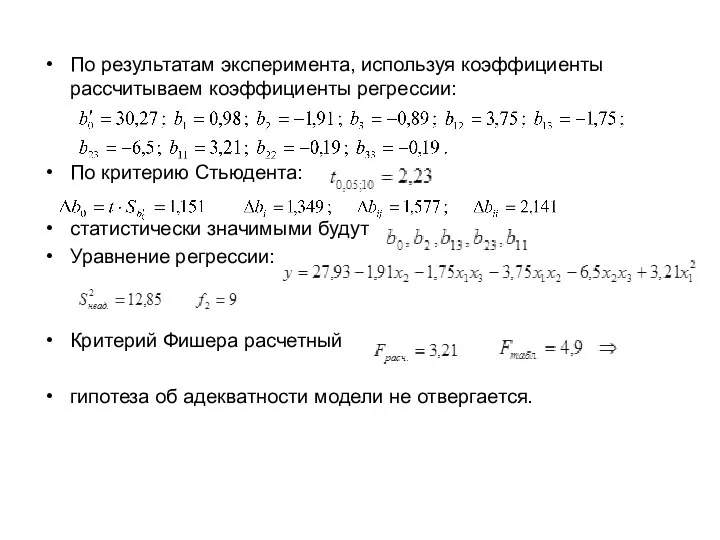
По результатам эксперимента, используя коэффициенты рассчитываем коэффициенты регрессии:
По критерию Стьюдента:
статистически
По результатам эксперимента, используя коэффициенты рассчитываем коэффициенты регрессии:
По критерию Стьюдента:
статистически
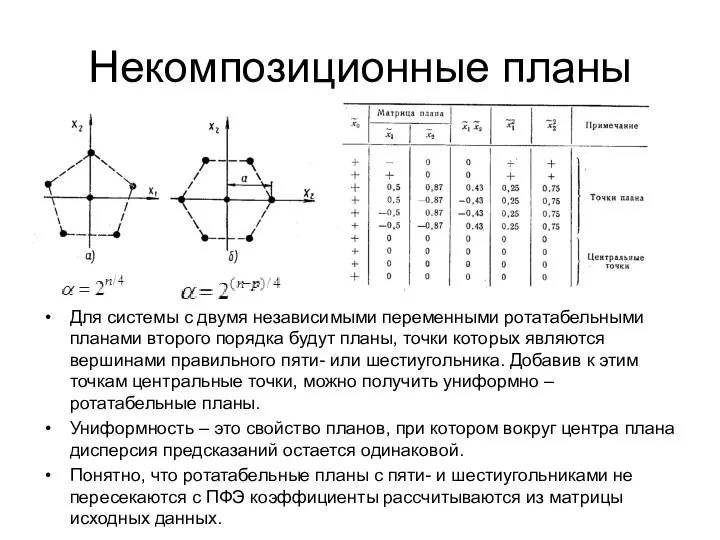
Некомпозиционные планы
Для системы с двумя независимыми переменными ротатабельными планами второго порядка
Некомпозиционные планы
Для системы с двумя независимыми переменными ротатабельными планами второго порядка
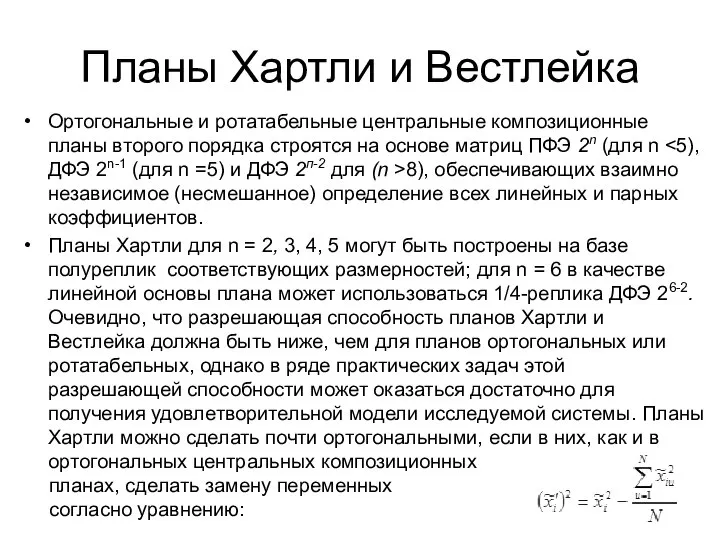
Планы Хартли и Вестлейка
Ортогональные и ротатабельные центральные композиционные планы второго порядка
Планы Хартли и Вестлейка
Ортогональные и ротатабельные центральные композиционные планы второго порядка
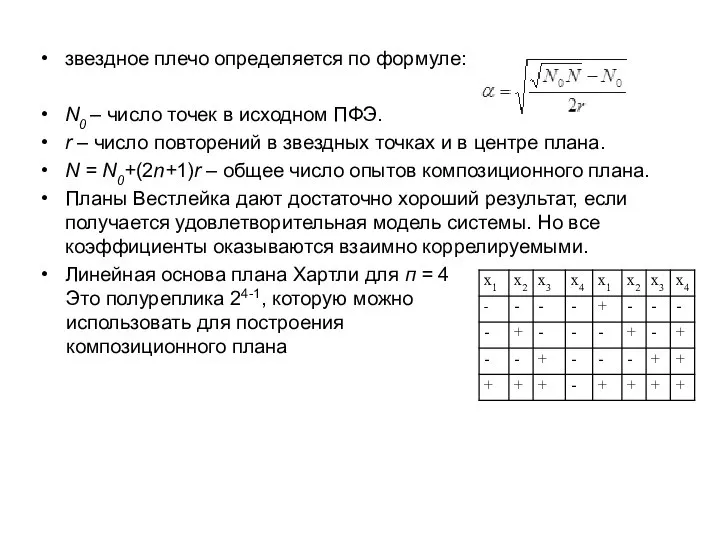
звездное плечо определяется по формуле:
N0 – число точек в исходном ПФЭ.
r
звездное плечо определяется по формуле:
N0 – число точек в исходном ПФЭ.
r
Планы близкие к D-оптимальным
Такие планы имеют минимальный объем эллипсоида ошибок оценок
Планы близкие к D-оптимальным
Такие планы имеют минимальный объем эллипсоида ошибок оценок
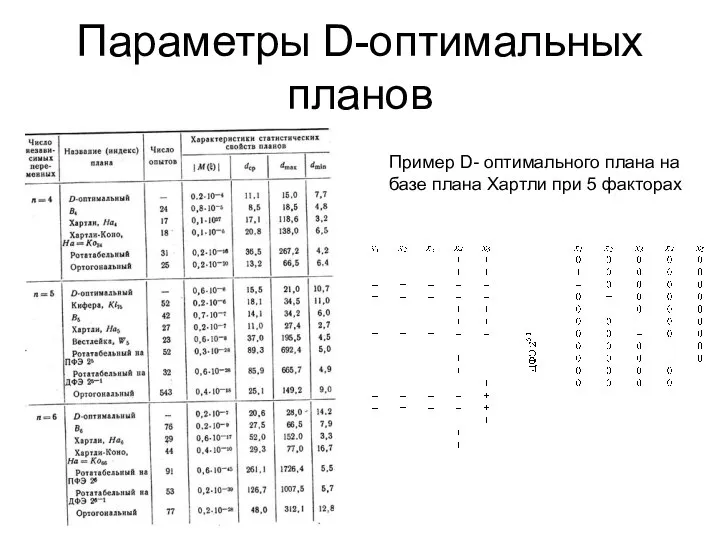
Параметры D-оптимальных планов
Пример D- оптимального плана на
базе плана Хартли при
Параметры D-оптимальных планов
Пример D- оптимального плана на
базе плана Хартли при
Пример расчета для плана второго порядка
Для алюминиевого сплава, легированного цинком (10,0-10,5%),
Пример расчета для плана второго порядка
Для алюминиевого сплава, легированного цинком (10,0-10,5%),
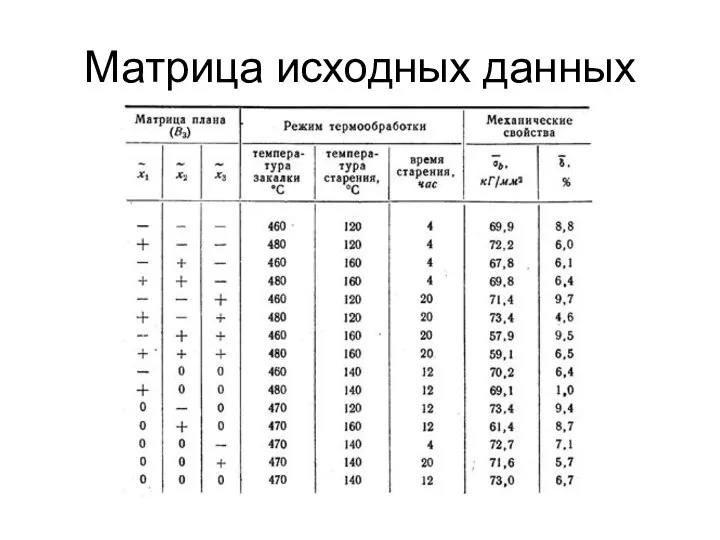
Матрица исходных данных
Матрица исходных данных
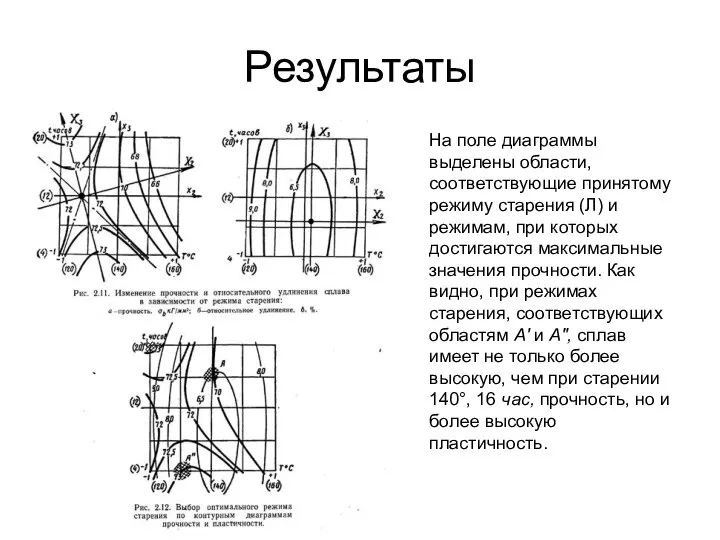
Результаты
На поле диаграммы выделены области, соответствующие принятому режиму старения (Л) и
Результаты
На поле диаграммы выделены области, соответствующие принятому режиму старения (Л) и
 Круги, окружности и шары вокруг нас. 6 класс
Круги, окружности и шары вокруг нас. 6 класс Презентация на тему Викторина Математика – царица наук
Презентация на тему Викторина Математика – царица наук  Угол. Прямой и развернутый угол. Чертежный треугольник
Угол. Прямой и развернутый угол. Чертежный треугольник Solução Numérica de Equações Diferenciais
Solução Numérica de Equações Diferenciais УСТНЫЙ СЧЕТ 6 класс
УСТНЫЙ СЧЕТ 6 класс  Основные понятия и теоремы теории вероятностей. Тема 2. Часть 2
Основные понятия и теоремы теории вероятностей. Тема 2. Часть 2 Презентация на тему Сумма углов треугольника Решение задач
Презентация на тему Сумма углов треугольника Решение задач 5 класс
5 класс Урок математики в 6 классе. Тема: « Действия с положительными и отрицательными числами»
Урок математики в 6 классе. Тема: « Действия с положительными и отрицательными числами» Кригинг
Кригинг Решение задач
Решение задач Угол между прямой и плоскостью
Угол между прямой и плоскостью Умножение десятичных дробей Урок математики в 5 классе по теме:
Умножение десятичных дробей Урок математики в 5 классе по теме:  Задачи на построение угла. Биссектриса
Задачи на построение угла. Биссектриса Пересечение плоскостей
Пересечение плоскостей Графики
Графики Презентация по математике "Измерение отрезков" - скачать бесплатно
Презентация по математике "Измерение отрезков" - скачать бесплатно Презентацию подготовила Кулагина В.В. Учитель начальных классов ФКОУ СОШ имени А.Н.Радищева Г. Кузнецк-12 2012г.
Презентацию подготовила Кулагина В.В. Учитель начальных классов ФКОУ СОШ имени А.Н.Радищева Г. Кузнецк-12 2012г.  Десятичные дроби. Сложение и вычитание десятичных дробей
Десятичные дроби. Сложение и вычитание десятичных дробей Пропорции и отношения. Урок – игра «Математическая поликлиника» 6 класс
Пропорции и отношения. Урок – игра «Математическая поликлиника» 6 класс Решение задач на смеси и растворы с помощью уравнений
Решение задач на смеси и растворы с помощью уравнений Игры (геометрия). Статические игры
Игры (геометрия). Статические игры Развёртка прямоугольного параллелепипеда. Урок 143
Развёртка прямоугольного параллелепипеда. Урок 143 Математика. (2 класс)
Математика. (2 класс) Презентация на тему Экскурсия по Московскому кремлю
Презентация на тему Экскурсия по Московскому кремлю  Равносильные уравнения
Равносильные уравнения Коллекция картинок для уроков математики Часть 1
Коллекция картинок для уроков математики Часть 1 Интерактивная раскраска по математике. Сложение и вычитание круглых десятков
Интерактивная раскраска по математике. Сложение и вычитание круглых десятков