- Теоретические основы геометрической модели объекта

Содержание
- 2. . Принцип построения геометрической модели объекта На прошлом занятии приведены формулы преобразования координат из систем координат
- 5. Внутреннее ориентирование снимков стереопары Геометрический смысл внутреннего ориентирования снимка заключается в том, что в результате его
- 6. Условие и уравнение взаимного ориентирования пары снимков
- 8. Уравнения внешнего ориентирования модели объекта. Элементы внешнего ориентирования модели
- 9. Внешнее ориентирование модели выполняют в два этапа: 1) используя расхождения известных и вычисленных координат опорных точек,
- 10. Вычисление элементов внешнего ориентирования снимка Элементы внешнего ориентирования снимка можно вычислить по опорным точкам с использованием
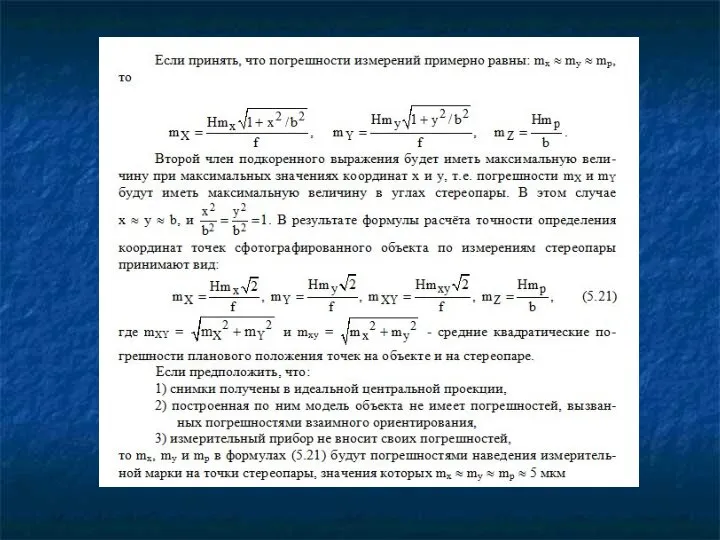
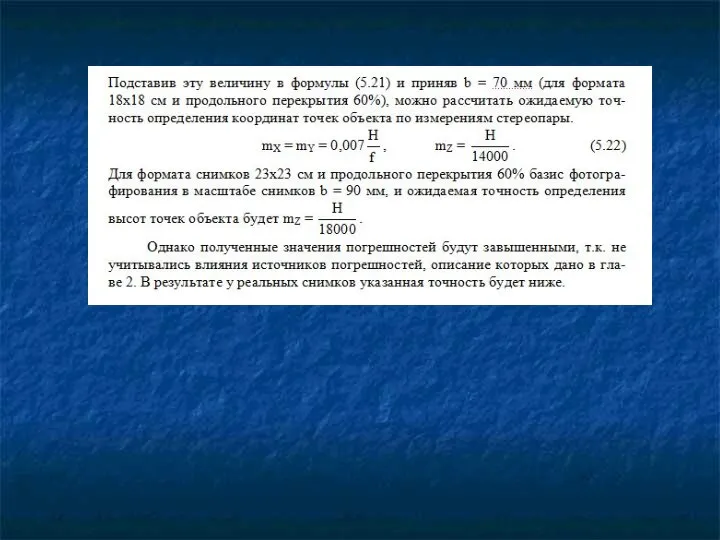
- 13. Точность определения координат точек объекта по измерениям стереопары
- 17. Скачать презентацию
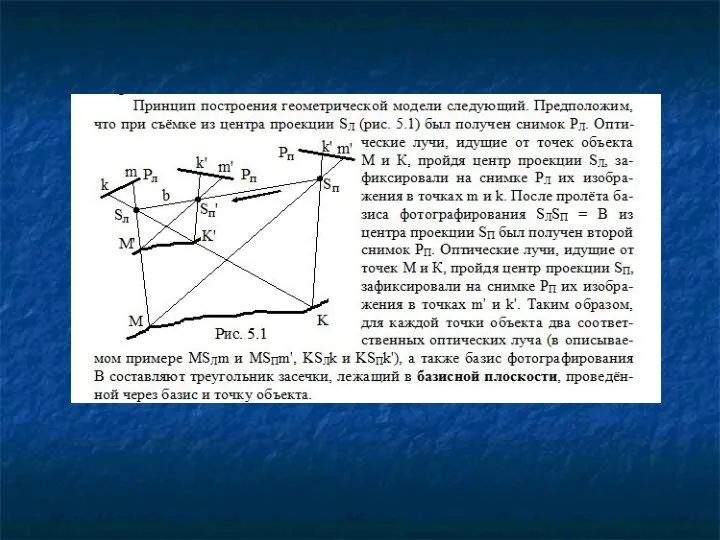
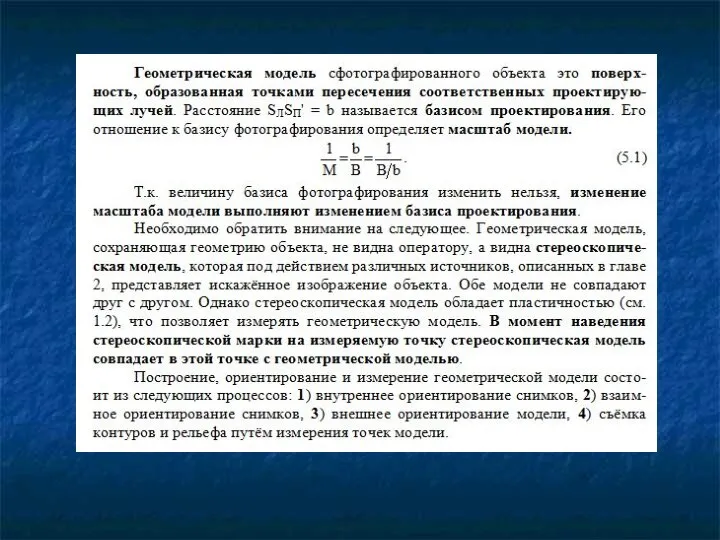
. Принцип построения геометрической модели объекта
На прошлом занятии приведены формулы
. Принцип построения геометрической модели объекта
На прошлом занятии приведены формулы
Внутреннее ориентирование снимков стереопары
Геометрический смысл внутреннего ориентирования снимка заключается в том,
Внутреннее ориентирование снимков стереопары
Геометрический смысл внутреннего ориентирования снимка заключается в том,
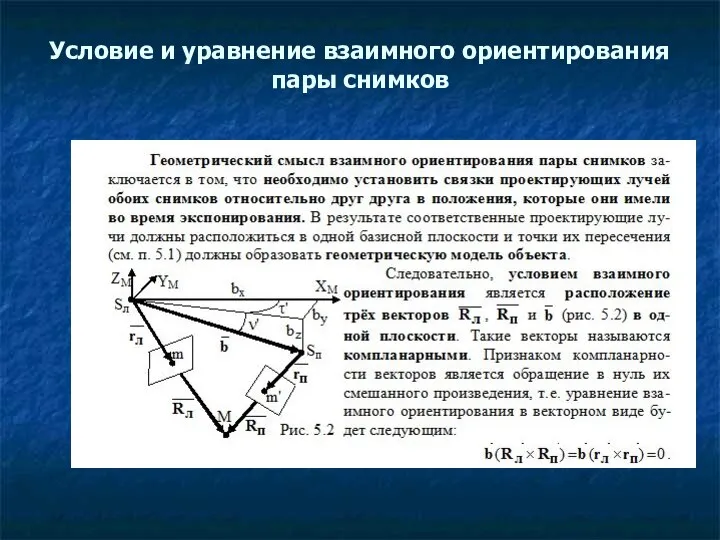
Условие и уравнение взаимного ориентирования пары снимков
Условие и уравнение взаимного ориентирования пары снимков
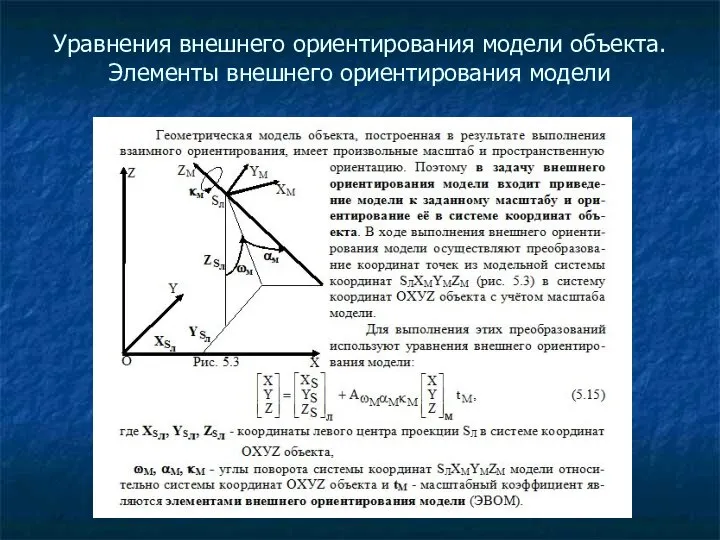
Уравнения внешнего ориентирования модели объекта.
Элементы внешнего ориентирования модели
Уравнения внешнего ориентирования модели объекта.
Элементы внешнего ориентирования модели
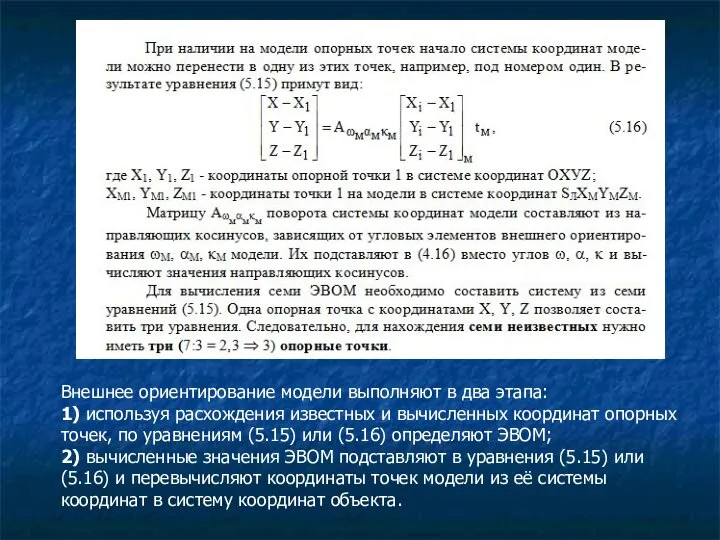
Внешнее ориентирование модели выполняют в два этапа:
1) используя расхождения известных и
Внешнее ориентирование модели выполняют в два этапа:
1) используя расхождения известных и
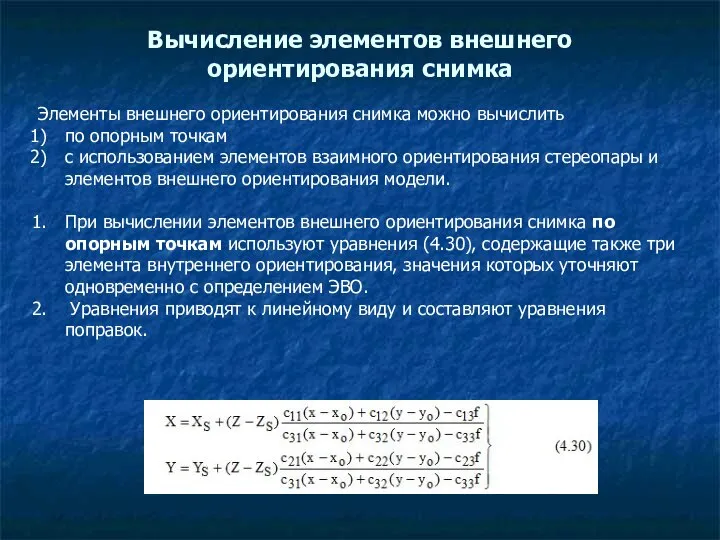
Вычисление элементов внешнего ориентирования снимка
Элементы внешнего ориентирования снимка можно вычислить
Вычисление элементов внешнего ориентирования снимка
Элементы внешнего ориентирования снимка можно вычислить
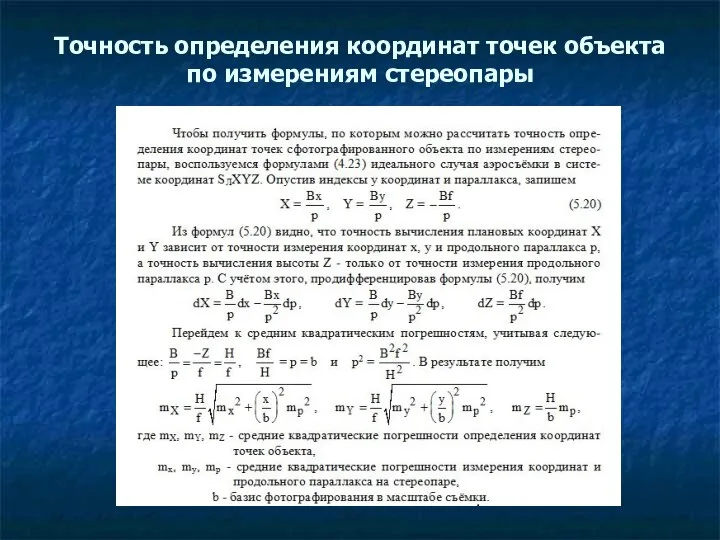
Точность определения координат точек объекта
по измерениям стереопары
Точность определения координат точек объекта
по измерениям стереопары
 Площадь треугольника
Площадь треугольника Решение логарифмических уравнений и неравенств. Урок-соревнование по математике в 11 классе
Решение логарифмических уравнений и неравенств. Урок-соревнование по математике в 11 классе Линейная функция. Построение графиков функций, аналитическое выражение которых содержит знак абсолютной величины
Линейная функция. Построение графиков функций, аналитическое выражение которых содержит знак абсолютной величины Преобразования графиков функций
Преобразования графиков функций Числовая окружность
Числовая окружность Процент. Из истории математики
Процент. Из истории математики Урок в 5 классе Составила учитель математики и информатики, II дидактическая степень, Арнаут Алла Л. АТО, Гагаузия, Комратский райо
Урок в 5 классе Составила учитель математики и информатики, II дидактическая степень, Арнаут Алла Л. АТО, Гагаузия, Комратский райо Занимательная математика Задания с использованием энциклопедий 4 класс Выполнила Доценко Е.Т.
Занимательная математика Задания с использованием энциклопедий 4 класс Выполнила Доценко Е.Т.  Дифференциальные уравнения. Системы дифференциальных уравнений
Дифференциальные уравнения. Системы дифференциальных уравнений Площади параллелограмма, треугольника и трапеции. Урок 20
Площади параллелограмма, треугольника и трапеции. Урок 20 Задача 7 Рыбаки и рыбки
Задача 7 Рыбаки и рыбки Линейные пространства. Линейный и ортогональный оператор. Преобразования координат
Линейные пространства. Линейный и ортогональный оператор. Преобразования координат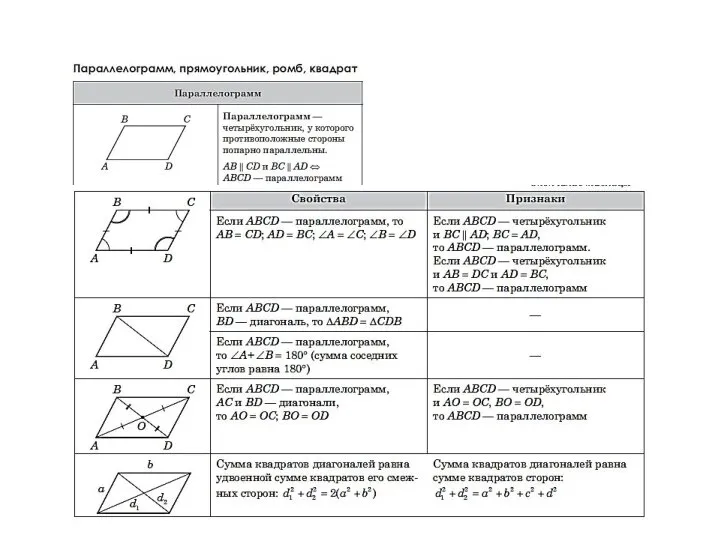 Четырёхугольники
Четырёхугольники Задача о железнодорожных составах
Задача о железнодорожных составах РЕГИСТРАТОРЫ ДАННЫХ РЕЙСА. ТРЕБОВАНИЯ И ЗАДАЧИ
РЕГИСТРАТОРЫ ДАННЫХ РЕЙСА. ТРЕБОВАНИЯ И ЗАДАЧИ  Правильные и неправильные дроби 5 класс - Презентация
Правильные и неправильные дроби 5 класс - Презентация Математика и музыка. Реалити-шоу
Математика и музыка. Реалити-шоу ЕГЭ. Математика .Тригонометрические уравнения
ЕГЭ. Математика .Тригонометрические уравнения Презентация по математике "Исследование функции с помощью производной" - скачать бесплатно
Презентация по математике "Исследование функции с помощью производной" - скачать бесплатно Санлы аралыклар. Тренажер
Санлы аралыклар. Тренажер Путешествие в страну Десятичных дробей. _
Путешествие в страну Десятичных дробей. _ Перпендикулярные прямые
Перпендикулярные прямые Сложение и вычитание десятичных дробей. Тренажер
Сложение и вычитание десятичных дробей. Тренажер Арифметическая и геометрическая прогрессии. 10 класс
Арифметическая и геометрическая прогрессии. 10 класс Бөлінгіштіктің негізгі қасиеттері
Бөлінгіштіктің негізгі қасиеттері Понятие трапеции
Понятие трапеции Дұрыс пирамида
Дұрыс пирамида Повторение таблицы умножения
Повторение таблицы умножения