Московский государственный индустриальный университет Эксперименты, связанные с использованием сигнала об электрокожном со
-
Московский государственный индустриальный университет Эксперименты, связанные с использованием сигнала об электрокожном со

Содержание
- 2. Цели и задачи Методы исследования сигнала электрокожного сопротивления (ЭКС) у человека Определить показатели переходных процессов ЭКС
- 3. Практические задачи где может использоваться ЭКС Полиграфы Майнд машины (тренажер эмоций) Приборы с биологической обратной связью
- 4. Модели измерения ЭКС - Рефлекторная модель. - Диффузионная модель. - Ионная модель. 4
- 5. Система контроля ЭКС «Альфаритмика» Плотность тока не более 10 мкА / см2; АЦП дискретность от 0,5сек.
- 6. Высокочувствительный сенсор электрического сопротивления кожи человека (Скиномметр) ИПМ им. М.В. Келдыша Диапазон рабочих токов 0,1÷250 мкА;
- 7. Получение характеристик I(Rx) для Альфаритмики и скиномметра ИПМ М.В. Келдыша Uмеж, В – напряжение между электродами
- 8. Интерфейс программы «Альфаритмика» 8
- 9. Организация обратной связи по ЭКС в биотехнических системах (БТС) В число задач управления в БТС входят
- 10. Цель биотехнического управления манипуляционным роботом для восстановительной медицины R(t) – ЭКС, компонент вектора B(t). D0, DS
- 11. Исследование взаимодействия робота и пациента по сигналу электрокожного сопротивления (ЭКС) Участки изменения ЭКС при массажном воздействии
- 12. Методика измерения электрокожного сопротивления График и параметры динамики сигнала ЭКС при механотерапии 12
- 13. Результаты экспериментальных исследований 13
- 14. Исследования сигнала ЭКС человека во время сна 14
- 15. Выводы Рассматриваются методы объективизации состояния человека по ЭКС; Экспериментальные результаты показывают возможность использования ЭКС для управления
- 17. Скачать презентацию
Цели и задачи
Методы исследования сигнала электрокожного сопротивления (ЭКС) у человека
Определить показатели
Цели и задачи
Методы исследования сигнала электрокожного сопротивления (ЭКС) у человека
Определить показатели

Практические задачи где может использоваться ЭКС
Полиграфы
Майнд машины (тренажер эмоций)
Практические задачи где может использоваться ЭКС
Полиграфы
Майнд машины (тренажер эмоций)

Модели измерения ЭКС
- Рефлекторная модель.
- Диффузионная модель.
- Ионная модель.
4
Модели измерения ЭКС
- Рефлекторная модель.
- Диффузионная модель.
- Ионная модель.
4

Система контроля ЭКС «Альфаритмика»
Плотность тока не более 10 мкА /
Система контроля ЭКС «Альфаритмика»
Плотность тока не более 10 мкА /
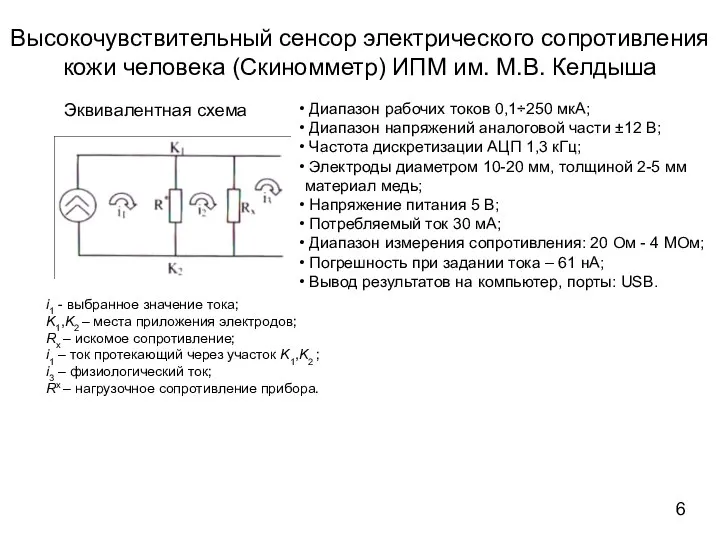
Высокочувствительный сенсор электрического сопротивления кожи человека (Скиномметр) ИПМ им. М.В. Келдыша
Высокочувствительный сенсор электрического сопротивления кожи человека (Скиномметр) ИПМ им. М.В. Келдыша
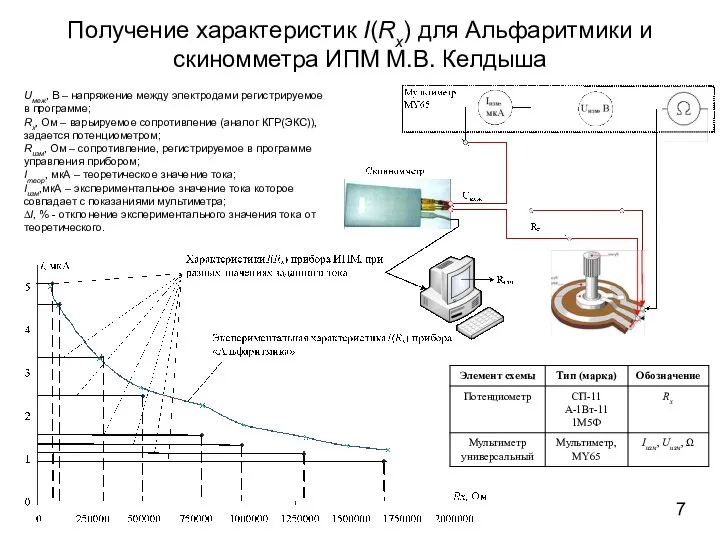
Получение характеристик I(Rx) для Альфаритмики и скиномметра ИПМ М.В. Келдыша
Uмеж, В
Получение характеристик I(Rx) для Альфаритмики и скиномметра ИПМ М.В. Келдыша
Uмеж, В
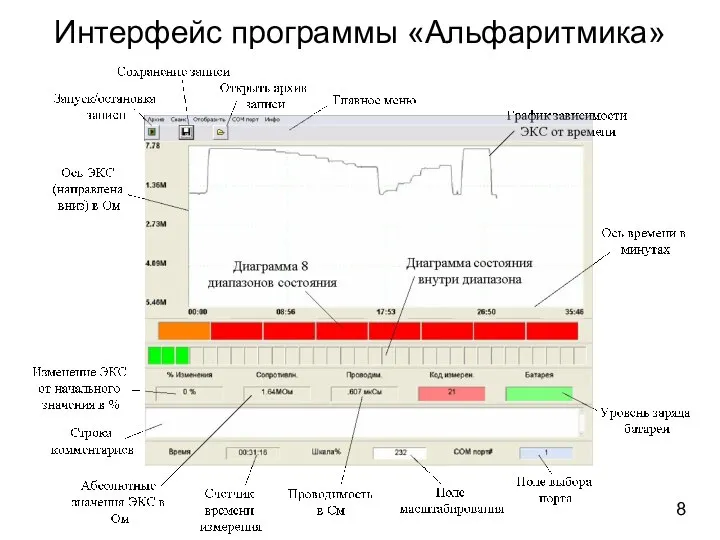
Интерфейс программы «Альфаритмика»
8
Интерфейс программы «Альфаритмика»
8

Организация обратной связи по ЭКС в биотехнических системах (БТС)
В число задач
Организация обратной связи по ЭКС в биотехнических системах (БТС)
В число задач
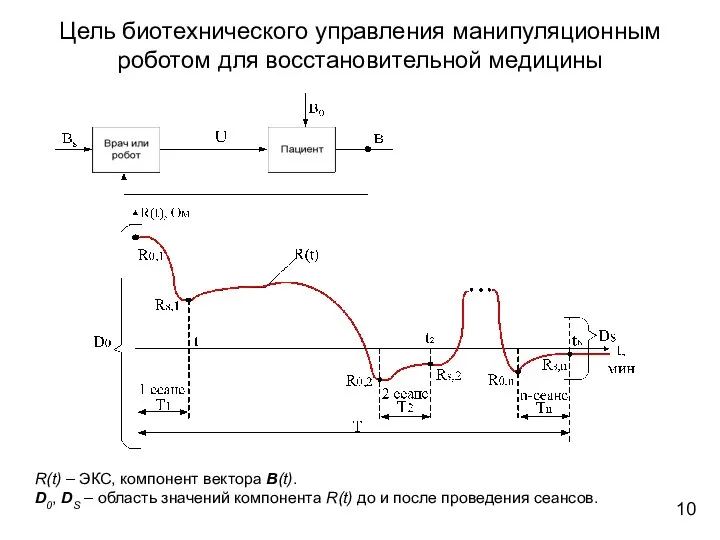
Цель биотехнического управления манипуляционным роботом для восстановительной медицины
R(t) – ЭКС, компонент
Цель биотехнического управления манипуляционным роботом для восстановительной медицины
R(t) – ЭКС, компонент
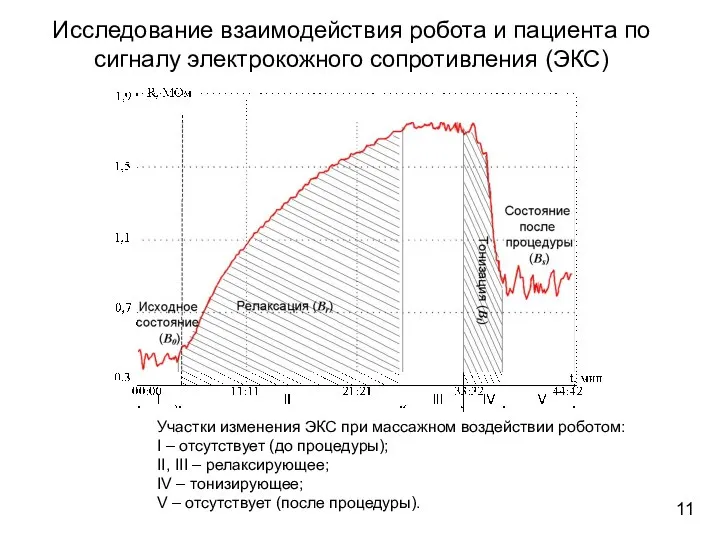
Исследование взаимодействия робота и пациента по сигналу электрокожного сопротивления (ЭКС)
Участки изменения
Исследование взаимодействия робота и пациента по сигналу электрокожного сопротивления (ЭКС)
Участки изменения
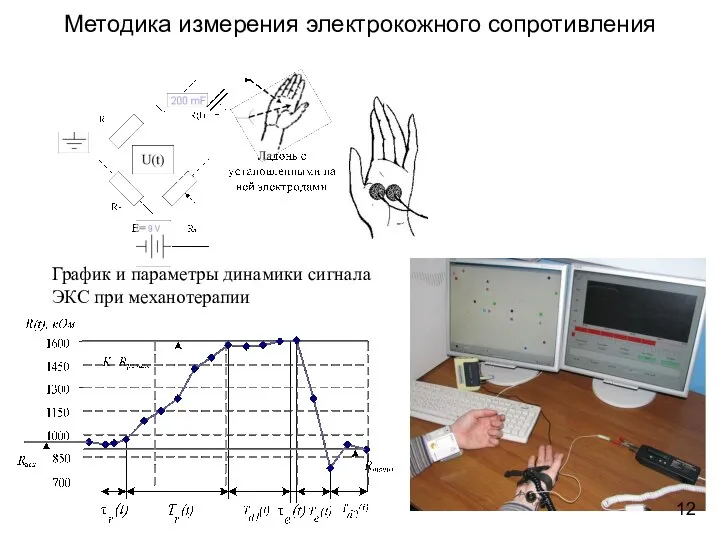
Методика измерения электрокожного сопротивления
График и параметры динамики сигнала ЭКС при механотерапии
12
Методика измерения электрокожного сопротивления
График и параметры динамики сигнала ЭКС при механотерапии
12
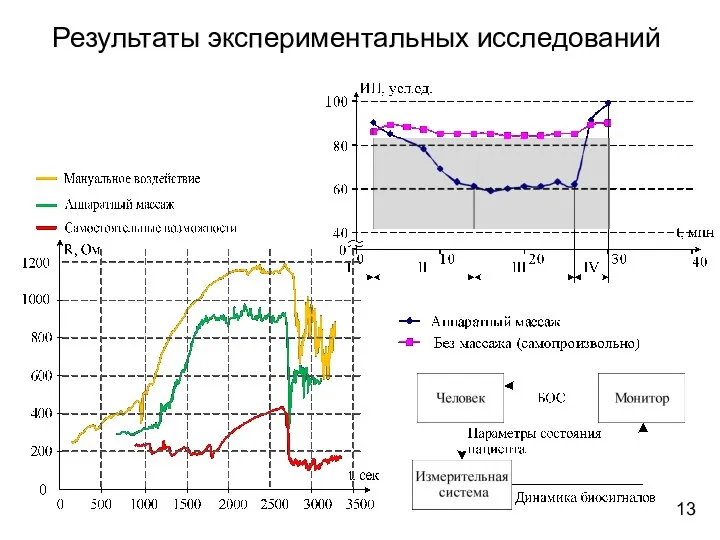
Результаты экспериментальных исследований
13
Результаты экспериментальных исследований
13
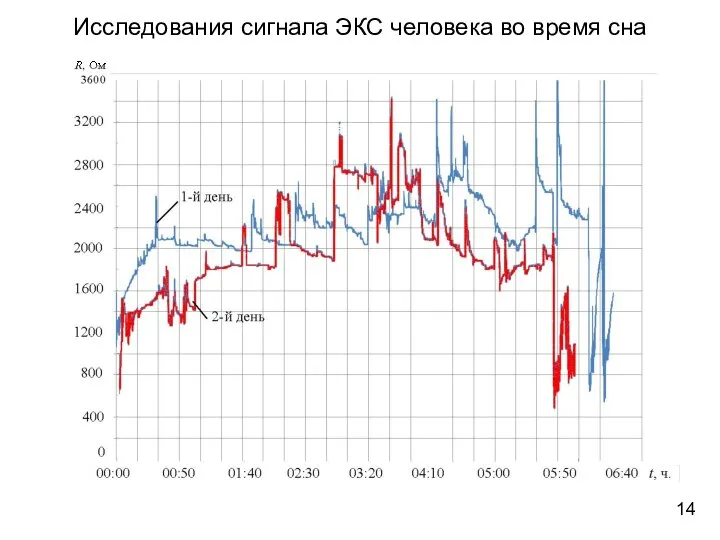
Исследования сигнала ЭКС человека во время сна
14
Исследования сигнала ЭКС человека во время сна
14
Выводы
Рассматриваются методы объективизации состояния человека по ЭКС;
Экспериментальные результаты показывают
Выводы
Рассматриваются методы объективизации состояния человека по ЭКС;
Экспериментальные результаты показывают
 Семья как малая социальная группа. Функции семьи. Основа семьи
Семья как малая социальная группа. Функции семьи. Основа семьи Презентация на тему "Эффективность психологического воздействия рекламных средств на человека" скачать
Презентация на тему "Эффективность психологического воздействия рекламных средств на человека" скачать  Презентация на тему "Генеология" скачать
Презентация на тему "Генеология" скачать  Князь Владимир и принятие христианства
Князь Владимир и принятие христианства Биогеоценоз леса - презентация к уроку Окружающий мир_
Биогеоценоз леса - презентация к уроку Окружающий мир_ Окружающий мир
Окружающий мир Социальная структура
Социальная структура В мире профессий
В мире профессий Урок в 11 классе
Урок в 11 классе Презентация на тему "Опера" скачать
Презентация на тему "Опера" скачать  Всероссийский молодежный форум Балтийский Артек
Всероссийский молодежный форум Балтийский Артек Презентация на тему "Мыслители об обществе и человеке" скачать
Презентация на тему "Мыслители об обществе и человеке" скачать  "Охрана природы – это важно или нет?”
"Охрана природы – это важно или нет?” Презентация на тему "Криминалистическая габитоскопия" скачать
Презентация на тему "Криминалистическая габитоскопия" скачать  Акция Дети говорят телефону доверия ДА!
Акция Дети говорят телефону доверия ДА! Работа с учащимися, потенциальными членами ОУСУ (5-6 класс)
Работа с учащимися, потенциальными членами ОУСУ (5-6 класс) Презентация на тему "Пальчиковая гимнастика." скачать
Презентация на тему "Пальчиковая гимнастика." скачать  Исторические школы Сибири
Исторические школы Сибири Презентация на тему ЖОСТОВО. РОСПИСЬ ПО МЕТАЛЛУ
Презентация на тему ЖОСТОВО. РОСПИСЬ ПО МЕТАЛЛУ  Сокровища волшебной шкатулки Сокровища волшебной шкатулки
Сокровища волшебной шкатулки Сокровища волшебной шкатулки Сочинение-описание памятника архитектуры «Храм Василия Блаженного» (Храм Покрова на рву)
Сочинение-описание памятника архитектуры «Храм Василия Блаженного» (Храм Покрова на рву) Вестминстерское аббатство
Вестминстерское аббатство Комплекс мероприятий, направленных на сплочение трудового коллектива
Комплекс мероприятий, направленных на сплочение трудового коллектива Взаимоотношения с людьми и качество жизни
Взаимоотношения с людьми и качество жизни Слёт профактива АОО Рослеспрофсоюза
Слёт профактива АОО Рослеспрофсоюза Толерантность. Все мы разные
Толерантность. Все мы разные Презентация «Дети Индиго» Приготовили: Белотицкая Елизавета Мамонтова Надежда 12 группа
Презентация «Дети Индиго» Приготовили: Белотицкая Елизавета Мамонтова Надежда 12 группа Презентация предназначена для использования на уроке ОБЖ 9 класс ТЕМА «ПОЖАР В ЖИЛОМ ПОМЕЩЕНИИ»
Презентация предназначена для использования на уроке ОБЖ 9 класс ТЕМА «ПОЖАР В ЖИЛОМ ПОМЕЩЕНИИ»