Аттестационная работа. Создание автономного колёсного робота для свободного движения по ограниченной поверхности (стол, парта)
- Аттестационная работа. Создание автономного колёсного робота для свободного движения по ограниченной поверхности (стол, парта)

Содержание
- 2. Краткая характеристика жанра работы В качестве итоговой работы предлагается методическая разработка по выполнению проектной работы «Создание
- 3. Краткая характеристика образовательного учреждения Государственное бюджетное общеобразовательное учреждение средняя общеобразовательная школа №595 Приморского района Санкт-Петербурга. http://www.school595.ru/
- 4. Цель работы Развитие навыков УУД. Привитие инженерно-конструкторского мышления. Умение использовать полученные знания и опыт. Приобретение практического
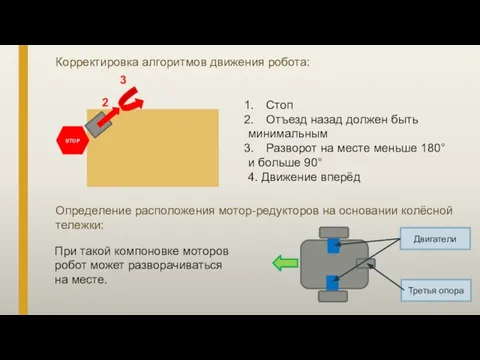
- 5. Графическое определение алгоритма движение при подъезде к краю стола. Определение расположения мотор-редукторов на основании колёсной тележки.
- 6. Проблема: избежать падение робота со стола. Проектирование: 2.1 разработка алгоритмов действия робота при подъезде к краю
- 7. Основное содержание Определение алгоритмов движения робота при подъезде к краю стола: 2 3 4 STOP Стоп
- 8. 2 3 STOP Стоп Отъезд назад должен быть минимальным Разворот на месте меньше 180° и больше
- 9. Выбор датчиков для определения края стола Инфракрасный датчик обнаружения препятствий. Инфракрасный датчик отражения. Инфракрасный датчик линии.
- 10. Оптимальное расположение датчиков на тележке. При таком расположении датчиков робот может обнаружить край стола, подъезжая к
- 11. void go() //движение вперёд { analogWrite(Left_Speed_Pin, runSpeed); analogWrite(Right_Speed_Pin, runSpeed); digitalWrite(Left_Dir_Pin, LOW); digitalWrite(Right_Dir_Pin, LOW); digitalWrite(Left_Go_Pin, HIGH); digitalWrite(Right_Go_Pin,
- 12. Создаём основную программу void setup() { pinMode(Left_Dir_Pin, OUTPUT); pinMode(Left_Go_Pin, OUTPUT); pinMode(Left_Speed_Pin, OUTPUT); pinMode(Right_Go_Pin, OUTPUT); pinMode(Right_Dir_Pin, OUTPUT);
- 13. Методы диагностики образовательного результата Соответствие результата поставленным целям и задачам. Осведомлённость в проблематике данной области. Оптимальность
- 15. Скачать презентацию
Краткая характеристика жанра работы
В качестве итоговой работы предлагается методическая разработка
по
Краткая характеристика жанра работы
В качестве итоговой работы предлагается методическая разработка
по
Краткая характеристика образовательного учреждения
Государственное бюджетное общеобразовательное учреждение
средняя общеобразовательная школа №595
Краткая характеристика образовательного учреждения
Государственное бюджетное общеобразовательное учреждение
средняя общеобразовательная школа №595
Цель работы
Развитие навыков УУД.
Привитие инженерно-конструкторского мышления.
Умение использовать полученные знания и опыт.
Приобретение
Цель работы
Развитие навыков УУД.
Привитие инженерно-конструкторского мышления.
Умение использовать полученные знания и опыт.
Приобретение
Графическое определение алгоритма движение при подъезде к
краю стола.
Определение расположения мотор-редукторов
Графическое определение алгоритма движение при подъезде к
краю стола.
Определение расположения мотор-редукторов
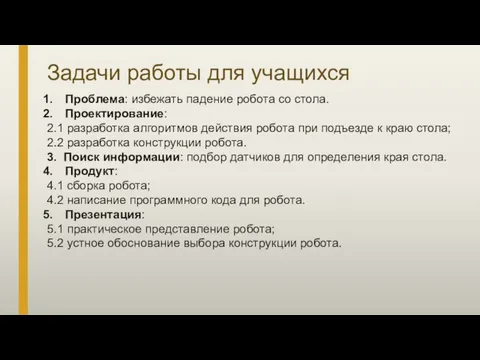
Проблема: избежать падение робота со стола.
Проектирование:
2.1 разработка алгоритмов действия робота
Проблема: избежать падение робота со стола.
Проектирование:
2.1 разработка алгоритмов действия робота
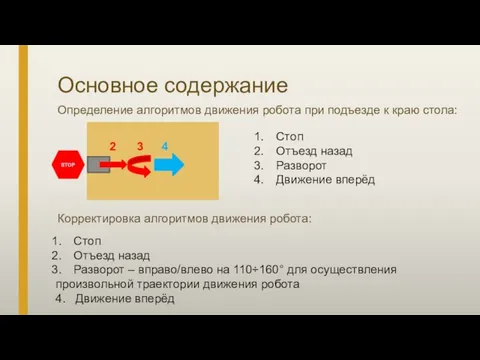
Основное содержание
Определение алгоритмов движения робота при подъезде к краю стола:
2
3
4
STOP
Стоп
Отъезд
Основное содержание
Определение алгоритмов движения робота при подъезде к краю стола:
2
3
4
STOP
Стоп
Отъезд
2
3
STOP
Стоп
Отъезд назад должен быть
минимальным
Разворот на месте меньше 180°
и больше 90°
4. Движение
2
3
STOP
Стоп
Отъезд назад должен быть
минимальным
Разворот на месте меньше 180°
и больше 90°
4. Движение

Выбор датчиков для определения края стола
Инфракрасный датчик обнаружения препятствий.
Инфракрасный датчик отражения.
Инфракрасный
Выбор датчиков для определения края стола
Инфракрасный датчик обнаружения препятствий.
Инфракрасный датчик отражения.
Инфракрасный
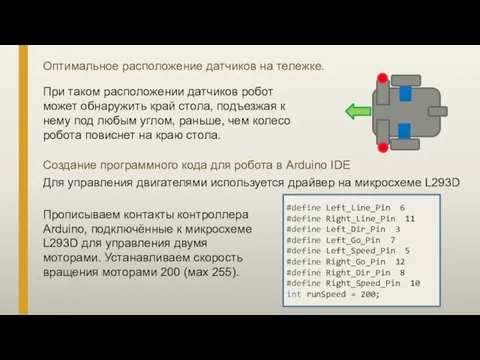
Оптимальное расположение датчиков на тележке.
При таком расположении датчиков робот может обнаружить
Оптимальное расположение датчиков на тележке.
При таком расположении датчиков робот может обнаружить
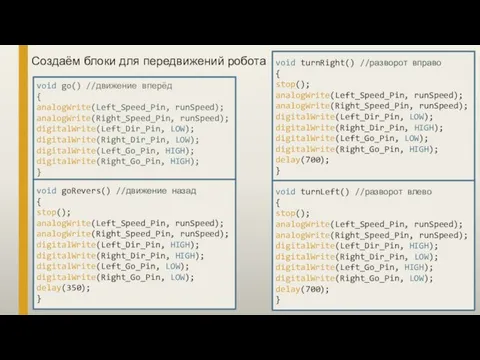
void go() //движение вперёд
{
analogWrite(Left_Speed_Pin, runSpeed); analogWrite(Right_Speed_Pin, runSpeed);
digitalWrite(Left_Dir_Pin, LOW); digitalWrite(Right_Dir_Pin, LOW);
void go() //движение вперёд
{
analogWrite(Left_Speed_Pin, runSpeed); analogWrite(Right_Speed_Pin, runSpeed);
digitalWrite(Left_Dir_Pin, LOW); digitalWrite(Right_Dir_Pin, LOW);
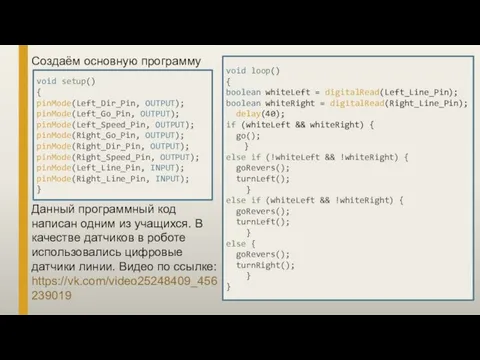
Создаём основную программу
void setup()
{
pinMode(Left_Dir_Pin, OUTPUT);
pinMode(Left_Go_Pin, OUTPUT);
pinMode(Left_Speed_Pin, OUTPUT);
pinMode(Right_Go_Pin, OUTPUT);
pinMode(Right_Dir_Pin, OUTPUT);
pinMode(Right_Speed_Pin, OUTPUT);
pinMode(Left_Line_Pin, INPUT);
pinMode(Right_Line_Pin,
Создаём основную программу
void setup()
{
pinMode(Left_Dir_Pin, OUTPUT);
pinMode(Left_Go_Pin, OUTPUT);
pinMode(Left_Speed_Pin, OUTPUT);
pinMode(Right_Go_Pin, OUTPUT);
pinMode(Right_Dir_Pin, OUTPUT);
pinMode(Right_Speed_Pin, OUTPUT);
pinMode(Left_Line_Pin, INPUT);
pinMode(Right_Line_Pin,
Методы диагностики образовательного результата
Соответствие результата поставленным целям и задачам.
Осведомлённость в проблематике
Методы диагностики образовательного результата
Соответствие результата поставленным целям и задачам.
Осведомлённость в проблематике
 Законы, принципы и правила педагогического процесса
Законы, принципы и правила педагогического процесса Аттестационная работа. Волшебные фантики
Аттестационная работа. Волшебные фантики День рождения Деда Мороза. Праздник в детском саду
День рождения Деда Мороза. Праздник в детском саду “Я выбираю профессию” станочник
“Я выбираю профессию” станочник Современный урок. Типы
Современный урок. Типы Colours
Colours Общественное мнение как метод педагогического стимулирования. Сущность и назначение метода
Общественное мнение как метод педагогического стимулирования. Сущность и назначение метода Аттестационная работа. Портфолио – лестница успеха
Аттестационная работа. Портфолио – лестница успеха Выпуск 1982
Выпуск 1982 Физкультминутка Листочки
Физкультминутка Листочки Занимательные Лэпбуки. Сабантуй
Занимательные Лэпбуки. Сабантуй Пример подготовки презентации
Пример подготовки презентации Аттестационная работа. Планирование работы школы по организации проектно-исследовательской деятельности учащихся
Аттестационная работа. Планирование работы школы по организации проектно-исследовательской деятельности учащихся Лексическая тема Одежда
Лексическая тема Одежда Влияние английского языка на нашу жизнь
Влияние английского языка на нашу жизнь Методическое сопровождение молодых педагогов
Методическое сопровождение молодых педагогов Ремонт на необитаемом острове
Ремонт на необитаемом острове Морские жители Лепка
Морские жители Лепка Выпуск 11 а класса МОУ СОШ №18 г. Брянска
Выпуск 11 а класса МОУ СОШ №18 г. Брянска Музыкально – ритмические движения как средство развития коммуникативных умений у дошкольников
Музыкально – ритмические движения как средство развития коммуникативных умений у дошкольников Аттестационная работа. Внеурочная деятельность по английскому языку в начальной школе. Программа Счастливый английский
Аттестационная работа. Внеурочная деятельность по английскому языку в начальной школе. Программа Счастливый английский Аттестационная работа. Создание научного общества учащихся
Аттестационная работа. Создание научного общества учащихся Об образовательных сессиях для педагогов Центров Точка роста
Об образовательных сессиях для педагогов Центров Точка роста Аттестационная работа. Проектная и исследовательская деятельность учащихся
Аттестационная работа. Проектная и исследовательская деятельность учащихся Хлеб – всему голова
Хлеб – всему голова Аттестационная работа. Планирование работы школы в области исследовательской/ проектной деятельности
Аттестационная работа. Планирование работы школы в области исследовательской/ проектной деятельности Проектный метод
Проектный метод Использование в работе педагога-психолога элементов инновационной терапевтической техники рисования Эбру
Использование в работе педагога-психолога элементов инновационной терапевтической техники рисования Эбру