- Агронавигатор. Система параллельного вождения Кампус

Содержание
- 2. Устройство Система параллельного вождения «Кампус» предназначена для повышения точности процесса обработки полей сельхозмашинами с целью предотвращения
- 3. Вид устройства спереди
- 4. Вид сзади и сбоку
- 5. Технические характеристики Агронавигатор оснащен современным процессором и высокоточным модулем GPS-навигации, что позволяет работать в поле с
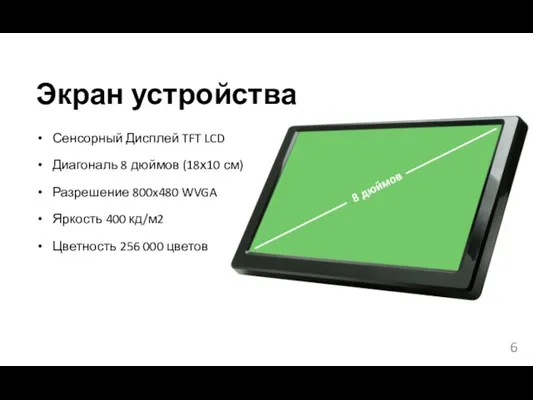
- 6. Экран устройства Сенсорный Дисплей TFT LCD Диагональ 8 дюймов (18х10 см) Разрешение 800x480 WVGA Яркость 400
- 7. Возможности и функции Курсоуказатель с двумя режимами: параллельное вождение (A-B) и свободный режим; Замер площади поля
- 8. Курсоуказатель Параллельное вождение (A-B) В режиме курсоуказателя поле делится на параллельные направляющие, которые помогают двигаться параллельно
- 9. Параллельное вождение (A-B) Автоматический режим Построение курса происходит после движения по прямой в течение 50-100 метров.
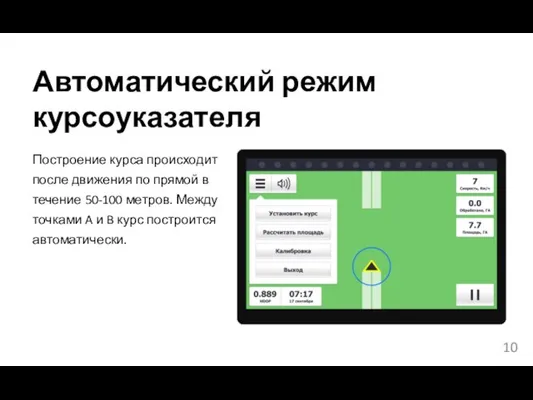
- 10. Автоматический режим курсоуказателя Построение курса происходит после движения по прямой в течение 50-100 метров. Между точками
- 11. Ручной режим курсоуказателя Оператору необходимо отметить начальную (А) и конечную (B) точку, после чего курс будет
- 12. Замер площади поля по периметру Замер площади поля позволяет быстро вычислить площадь поля, объехав его по
- 13. Цветовая индикация Цветовая индикация показывает отклонение от текущей направляющей. Каждое деление шкалы курсоуказателя равно 30 см.
- 14. Работа с полями Агронавигатор может сохранять в памяти множество полей. Чтобы начать работу необходимо выбрать имеющееся
- 15. Приостановка работы В агронавигаторе «Кампус» предусмотрена функция приостановки работы. Ей удобно пользоваться, когда необходимо приостановить работу
- 16. Калибровка Выполнять калибровку местоположения необходимо в том случае, когда работа в поле занимает продолжительное время и
- 18. Скачать презентацию
Устройство
Система параллельного вождения «Кампус» предназначена для повышения точности процесса обработки полей
Устройство
Система параллельного вождения «Кампус» предназначена для повышения точности процесса обработки полей
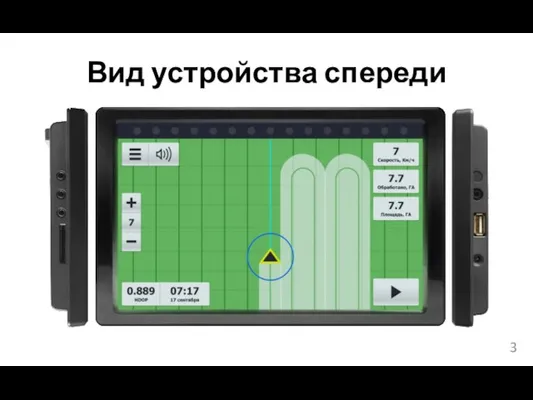
Вид устройства спереди
Вид устройства спереди

Вид сзади и сбоку
Вид сзади и сбоку
Технические характеристики
Агронавигатор оснащен современным процессором и высокоточным модулем GPS-навигации, что позволяет
Технические характеристики
Агронавигатор оснащен современным процессором и высокоточным модулем GPS-навигации, что позволяет
Экран устройства
Сенсорный Дисплей TFT LCD
Диагональ 8 дюймов (18х10 см)
Разрешение 800x480 WVGA
Яркость
Экран устройства
Сенсорный Дисплей TFT LCD
Диагональ 8 дюймов (18х10 см)
Разрешение 800x480 WVGA
Яркость
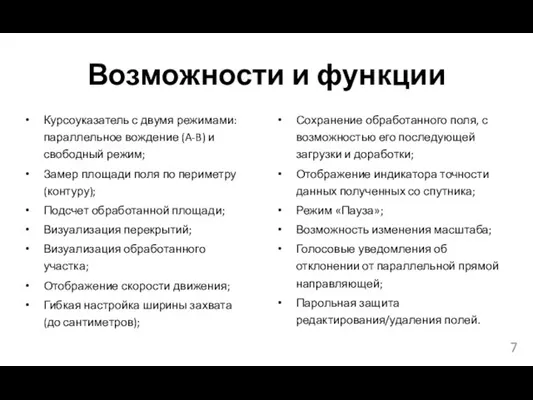
Возможности и функции
Курсоуказатель с двумя режимами: параллельное вождение (A-B) и свободный
Возможности и функции
Курсоуказатель с двумя режимами: параллельное вождение (A-B) и свободный
Курсоуказатель
Параллельное вождение (A-B)
В режиме курсоуказателя поле делится на параллельные направляющие, которые
Курсоуказатель
Параллельное вождение (A-B)
В режиме курсоуказателя поле делится на параллельные направляющие, которые
Параллельное вождение (A-B)
Автоматический режим
Построение курса происходит после движения по прямой в
Параллельное вождение (A-B)
Автоматический режим
Построение курса происходит после движения по прямой в
Автоматический режим курсоуказателя
Построение курса происходит после движения по прямой в течение
Автоматический режим курсоуказателя
Построение курса происходит после движения по прямой в течение

Ручной режим курсоуказателя
Оператору необходимо отметить начальную (А) и конечную (B) точку,
Ручной режим курсоуказателя
Оператору необходимо отметить начальную (А) и конечную (B) точку,
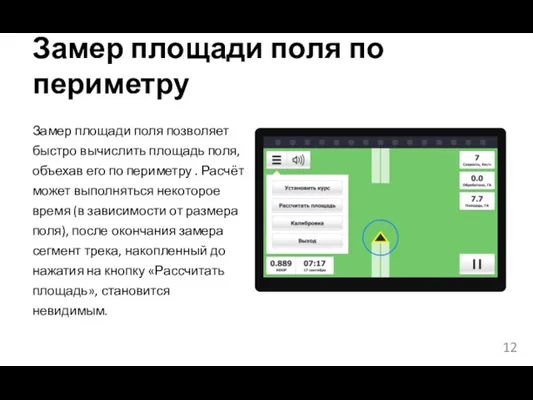
Замер площади поля по периметру
Замер площади поля позволяет быстро вычислить площадь
Замер площади поля по периметру
Замер площади поля позволяет быстро вычислить площадь
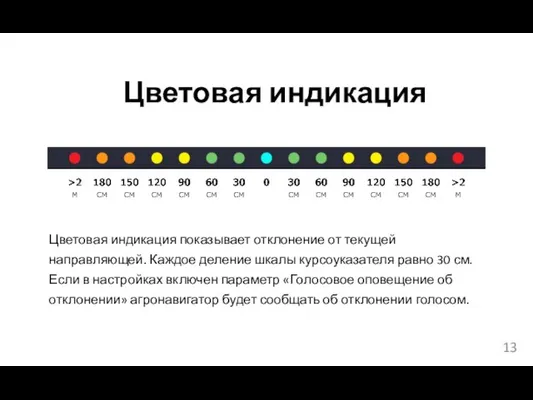
Цветовая индикация
Цветовая индикация показывает отклонение от текущей направляющей. Каждое деление шкалы
Цветовая индикация
Цветовая индикация показывает отклонение от текущей направляющей. Каждое деление шкалы
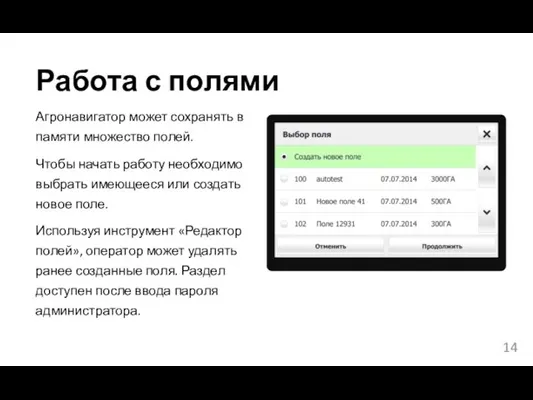
Работа с полями
Агронавигатор может сохранять в памяти множество полей.
Чтобы начать
Работа с полями
Агронавигатор может сохранять в памяти множество полей.
Чтобы начать

Приостановка работы
В агронавигаторе «Кампус» предусмотрена функция приостановки работы. Ей удобно пользоваться,
Приостановка работы
В агронавигаторе «Кампус» предусмотрена функция приостановки работы. Ей удобно пользоваться,

Калибровка
Выполнять калибровку местоположения необходимо в том случае, когда работа в поле
Калибровка
Выполнять калибровку местоположения необходимо в том случае, когда работа в поле
 Computer. Computer network
Computer. Computer network 1.Центр Компетенций
1.Центр Компетенций Пленительная красота
Пленительная красота lektsia_1
lektsia_1 Изготовление домашних пельменей
Изготовление домашних пельменей Моделирование фартука, способы моделирования, эскиз, бейка, кант, кружево, аппликация. 5 класс
Моделирование фартука, способы моделирования, эскиз, бейка, кант, кружево, аппликация. 5 класс Колокольные звоны
Колокольные звоны Тема нашего урока сегодня звучит так Школьный карнавал
Тема нашего урока сегодня звучит так Школьный карнавал ЗАЧЕТНЫЕ ТРЕБОВАНИЯ К ИНТЕРНЕТ-ПРОЕКТУ
ЗАЧЕТНЫЕ ТРЕБОВАНИЯ К ИНТЕРНЕТ-ПРОЕКТУ Особенности формирования финансовой грамотности, антикоррупционного поведения по экономическим дисциплинам и МДК
Особенности формирования финансовой грамотности, антикоррупционного поведения по экономическим дисциплинам и МДК 20131107_igra_permskiykray
20131107_igra_permskiykray Лекция 4. Определение напряжений в грунтовой толще
Лекция 4. Определение напряжений в грунтовой толще Гусеничная птатформа, управляемая с планшета
Гусеничная птатформа, управляемая с планшета Творческий проект Кардиган Антигрусть Вязание крючком в стиле пэчворк
Творческий проект Кардиган Антигрусть Вязание крючком в стиле пэчворк Методическая папка в лагерь
Методическая папка в лагерь Saltanat saray. Ресторанный комплекс
Saltanat saray. Ресторанный комплекс 3d render caversham
3d render caversham Production and growth
Production and growth 20111124_moi_derevya_0
20111124_moi_derevya_0 20160723_rossiysko-turetskie_diplomaticheskie_otnosheniya_v_noveyshee_vremya
20160723_rossiysko-turetskie_diplomaticheskie_otnosheniya_v_noveyshee_vremya Устройство настольного горизонтально-фрезерного станка (8 класс)
Устройство настольного горизонтально-фрезерного станка (8 класс) зверские часы _ by Artem Morozov
зверские часы _ by Artem Morozov Лишь вера одна никогда не бывает одна
Лишь вера одна никогда не бывает одна Прадедушке и прабабушке посвящается
Прадедушке и прабабушке посвящается Родительское собрание. Итоги 3 четверти
Родительское собрание. Итоги 3 четверти Женщина. Когда Бог создавал женщину
Женщина. Когда Бог создавал женщину Контроллер Logik 9
Контроллер Logik 9 Универсальный солдат Великой Отечественной
Универсальный солдат Великой Отечественной