- Гусеничная птатформа, управляемая с планшета

Содержание
- 2. Цель проекта Научиться проектировать и создавать движущиеся модели с дистанционным упарвлением.
- 3. Задачи проекта Сконструировать гусеничную платформу для танка Построить детали рамы и гусениц в программе 3D моделирования
- 4. Проблемы Гусеничная платформа полнистью проектировалась с нуля, поэтому для того, чтобы итоговая конструкция оказалась работоспособной, необходимо
- 5. Конструирование и моделирование Конструирование производилось сразу в среде моделирования КОМПАС 3D. Для этого туда сперва были
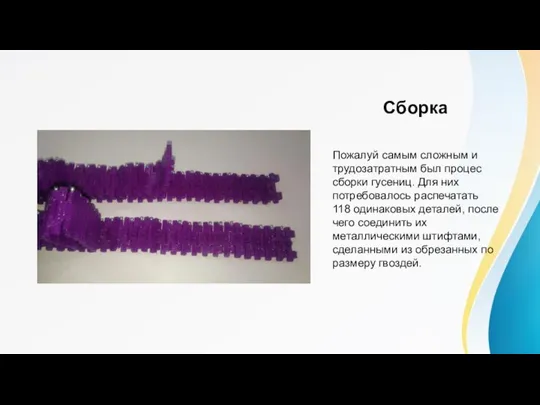
- 6. Сборка Пожалуй самым сложным и трудозатратным был процес сборки гусениц. Для них потребовалось распечатать 118 одинаковых
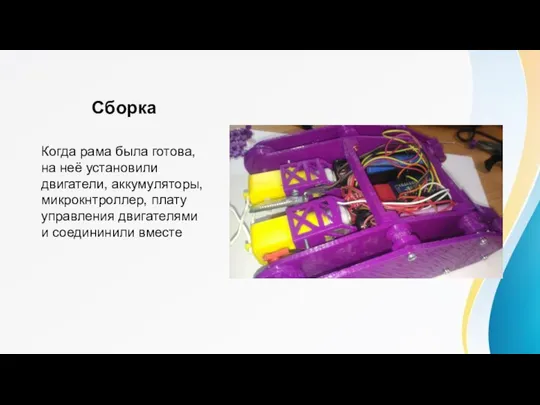
- 7. Сборка Когда рама была готова, на неё установили двигатели, аккумуляторы, микрокнтроллер, плату управления двигателями и соедининили
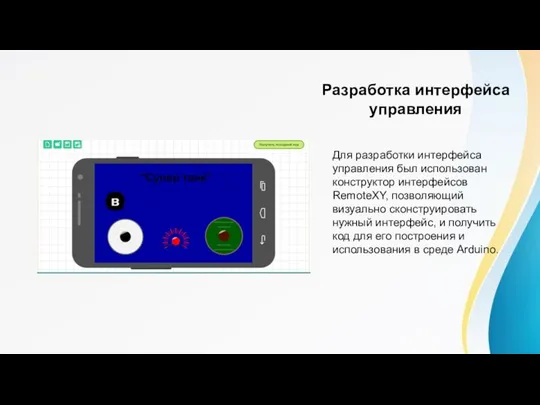
- 8. Разработка интерфейса управления Для разработки интерфейса управления был использован конструктор интерфейсов RemoteXY, позволяющий визуально сконструировать нужный
- 9. Управляющая программа Когда платформа и интерфейс для неё были собраны, осталось только написать программу для микроконтроллера
- 10. Результатом работы стала вот такая гусеничная платформа
- 11. Выводы: В результате проделанной работы Научились создавать собственные сборные конструкции в среде 3D моделирования путём построения
- 13. Скачать презентацию
Цель проекта
Научиться проектировать и создавать движущиеся модели с дистанционным упарвлением.
Цель проекта
Научиться проектировать и создавать движущиеся модели с дистанционным упарвлением.
Задачи проекта
Сконструировать гусеничную платформу для танка
Построить детали рамы и гусениц в
Задачи проекта
Сконструировать гусеничную платформу для танка
Построить детали рамы и гусениц в
Проблемы
Гусеничная платформа полнистью проектировалась с нуля, поэтому для того, чтобы итоговая
Проблемы
Гусеничная платформа полнистью проектировалась с нуля, поэтому для того, чтобы итоговая
Конструирование и моделирование
Конструирование производилось сразу в среде моделирования КОМПАС 3D. Для
Конструирование и моделирование
Конструирование производилось сразу в среде моделирования КОМПАС 3D. Для
Сборка
Пожалуй самым сложным и трудозатратным был процес сборки гусениц. Для них
Сборка
Пожалуй самым сложным и трудозатратным был процес сборки гусениц. Для них
Сборка
Когда рама была готова, на неё установили двигатели, аккумуляторы, микрокнтроллер, плату
Сборка
Когда рама была готова, на неё установили двигатели, аккумуляторы, микрокнтроллер, плату
Разработка интерфейса управления
Для разработки интерфейса управления был использован конструктор интерфейсов RemoteXY,
Разработка интерфейса управления
Для разработки интерфейса управления был использован конструктор интерфейсов RemoteXY,
Управляющая программа
Когда платформа и интерфейс для неё были собраны, осталось только
Управляющая программа
Когда платформа и интерфейс для неё были собраны, осталось только
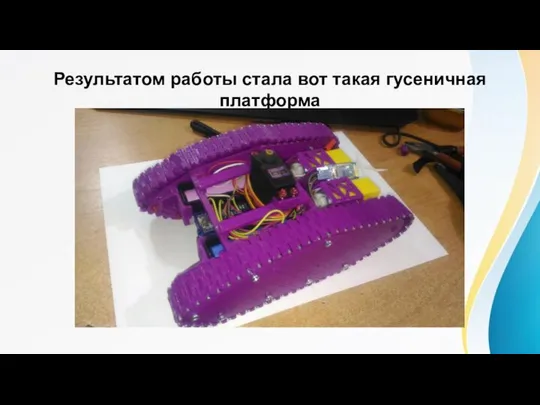
Результатом работы стала вот такая гусеничная платформа
Результатом работы стала вот такая гусеничная платформа
Выводы:
В результате проделанной работы
Научились создавать собственные сборные конструкции в среде 3D
Выводы:
В результате проделанной работы
Научились создавать собственные сборные конструкции в среде 3D
 Аттестационная работа. Образовательная программа общеинтеллектуального направления В мире математики
Аттестационная работа. Образовательная программа общеинтеллектуального направления В мире математики Сухопутный транспорт России
Сухопутный транспорт России 20140322_gorod_masterov_i_reztsa_-_kopiya_2
20140322_gorod_masterov_i_reztsa_-_kopiya_2 Морфемика
Морфемика Знакомство с микшерными пультами
Знакомство с микшерными пультами Контроль, учет и анализ в процессе управления
Контроль, учет и анализ в процессе управления Монтаж и настройка локальной сети организации
Монтаж и настройка локальной сети организации Завершение строительства объекта с обманутыми дольщиками – ЖК Материк
Завершение строительства объекта с обманутыми дольщиками – ЖК Материк Религия
Религия Композитные материалы
Композитные материалы Получение сухих ферментированных колбас с использованием стартовых культур
Получение сухих ферментированных колбас с использованием стартовых культур Микробиология масла
Микробиология масла Panoramic Post 1
Panoramic Post 1 Музыка зимы
Музыка зимы описание ТВ ролика KVI
описание ТВ ролика KVI 20150303_vidy_zhilyh_pomescheniy_prezentatsiya_
20150303_vidy_zhilyh_pomescheniy_prezentatsiya_ Солнечный клоун
Солнечный клоун Синхронные или тактируемые триггеры. JK - триггеры
Синхронные или тактируемые триггеры. JK - триггеры Готовая практика по архитектуре
Готовая практика по архитектуре Первая мировая война
Первая мировая война Проблемы рационального использования сырья и материалов в производстве КДК
Проблемы рационального использования сырья и материалов в производстве КДК Каталога сделано в Уфе пример оформления (2)
Каталога сделано в Уфе пример оформления (2) Изображение характера животных Четвероногий герой
Изображение характера животных Четвероногий герой Практика Савченко
Практика Савченко Оценка помесных ремонтных хрячков по собственной продуктивности в условиях ООО Селекционно-Гибридный центр
Оценка помесных ремонтных хрячков по собственной продуктивности в условиях ООО Селекционно-Гибридный центр Разработка охранного устройства на базе датчика движения
Разработка охранного устройства на базе датчика движения С 8 марта наши замечательные девушки
С 8 марта наши замечательные девушки Интерактивная викторина
Интерактивная викторина