- Автоматизированный электропривод

Содержание
- 2. Основная: Москаленко, В. В. Электрический привод: учеб. для студентов вузов, обучающихся по направлению подготовки "Электротехника, электромеханика
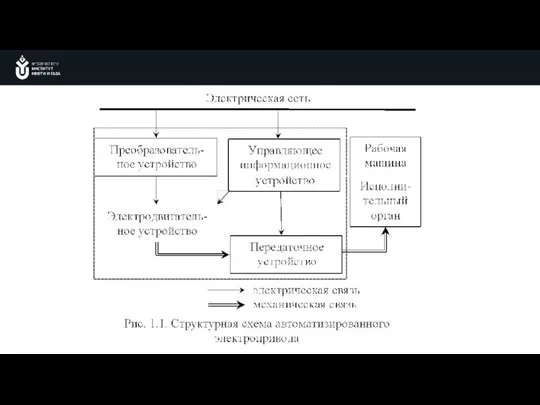
- 3. Согласно ГОСТ Р 50369-92 электрическим приводом называется электромеханическая система, состоящая в общем случае из взаимодействующих преобразователей
- 4. Классификация электроприводов обычно производится по виду движения и управляемости, роду электрического и механического передаточных устройств, способу
- 5. По уровню автоматизации электроприводы можно разделить на неавтоматизированные, автоматизированные и автоматические. Два последних типа электроприводов находят
- 6. По способу передачи механической энергии исполнительному органу электроприводы делятся на групповые, индивидуальные и взаимосвязанные. Групповой электропривод
- 7. Индивидуальный электропривод характеризуется тем, что каждый исполнительный орган рабочей машины приводится в движение своим отдельным двигателем.
- 8. Взаимосвязанный электропривод содержит два или несколько электрически или механически связанных между собой индивидуальных ЭП, при работе
- 10. Преобразовательное устройство (преобразователь электроэнергии) – электротехническое устройство, преобразующее электрическую энергию с одними значениями параметров и/или показателей
- 11. Электродвигательное устройство (электромеханический преобразователь) – электротехническое устройство, предназначенное для преобразования электрической энергии в механическую или механической
- 12. Управляющее информационное устройство. Управляющее устройство предназначено для формирования управляющих воздействий в электроприводе и представляет собой совокупность
- 13. Передаточное устройство состоит из механической передачи и устройства сопряжения. Механическая передача – это механический преобразователь, предназначенный
- 14. Рабочая машина – машина, осуществляющая изменение формы, свойств, состояния и положения предмета труда. Исполнительный орган рабочей
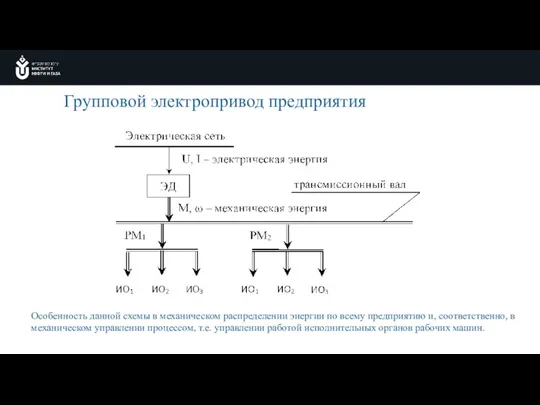
- 15. Групповой электропривод предприятия Особенность данной схемы в механическом распределении энергии по всему предприятию и, соответственно, в
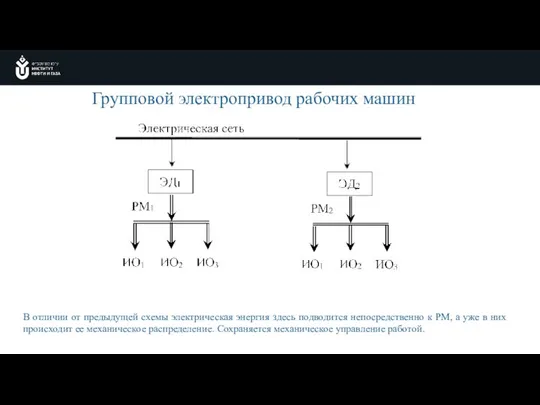
- 16. Групповой электропривод рабочих машин В отличии от предыдущей схемы электрическая энергия здесь подводится непосредственно к РМ,
- 17. К числу общих недостатков группового электропривода можно отнести: ступенчатое регулирование скорости; малый диапазон регулирования; опасные условия
- 18. В таком варианте электропривода распределение электрической энергии происходит вплоть до рабочих органов. Также появляется возможность управления
- 19. В настоящее время индивидуальный ЭП – это основной тип промышленно используемого электропривода. Но не единственный. В
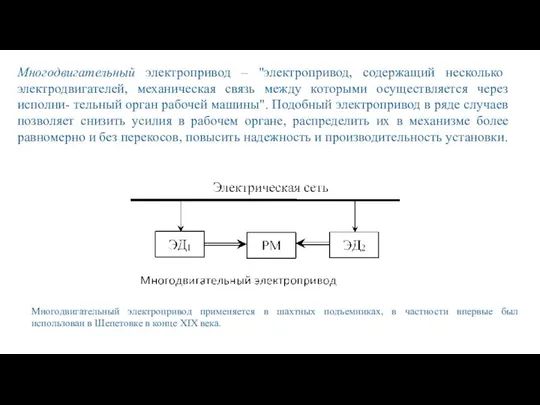
- 20. Многодвигательный электропривод – "электропривод, содержащий несколько электродвигателей, механическая связь между которыми осуществляется через исполни- тельный орган
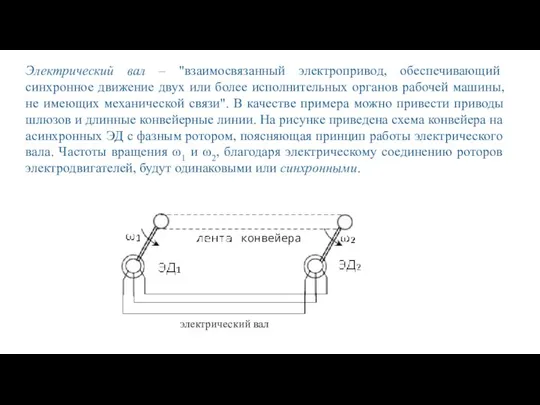
- 21. Электрический вал – "взаимосвязанный электропривод, обеспечивающий синхронное движение двух или более исполнительных органов рабочей машины, не
- 22. В настоящее время для электропривода характерна тенденция использования энергосберегающих технологий. К традиционным системам, позволяющим возвращать энергию
- 23. Если рассматривать электродвигательные установки с позиций теории электропривода, то как объект изучения это электромеханическая система, являющаяся
- 25. Механическая часть включает все движущиеся элементы механизма – ротор двигателя РД, передаточное устройство ПУ, исполнительный механизм
- 26. Основной функцией электропривода является приведение в движение рабочей машины в соответствии с требованиями технологического режима. Движение
- 27. В зависимости от вида передачи и конструкций рабочей машины различают: ЭП вращательного движения, обеспечивающий, соответственно, вращательное
- 28. Реактивные моменты создаются силой трения, силами сжатия, растяжения, кручения неупругих тел. Классическим примером здесь может служить
- 29. Активные (потенциальные) моменты создаются силой тяжести, силами сжатия, растяжения, кручения упругих тел. В МЧ ЭП активные
- 30. Краткий анализ видов Мс показывает, что между реактивными и активными моментами имеется существенное отличие: реактивный момент
- 31. К первой группе относятся механизмы, у которых статический момент не зависит от скорости вращения, то есть
- 32. Вторая группа механизмов достаточно представительна Здесь Мс зависит от скорости вращения РМ: где Мсо – момент
- 33. При а = 0 имеем Мс(ω) = Мсн, то есть получаем механическую характеристику машин первой группы.
- 34. При а = 2 получаем наиболее многочисленную группу рабочих механизмов, имеющих вентиляторную характеристику (вентиляторы, гребные винты,
- 35. Третья группа механизмов – это группа машин, у которых статический момент является функцией угла поворота вала
- 36. Четвертая группа механизмов – это группа рабочих машин, у которых Мс зависит одновременно и от угла
- 38. Скачать презентацию
Основная:
Москаленко, В. В. Электрический привод: учеб. для студентов вузов, обучающихся по
Основная:
Москаленко, В. В. Электрический привод: учеб. для студентов вузов, обучающихся по
Согласно ГОСТ Р 50369-92 электрическим приводом называется электромеханическая система, состоящая в
Согласно ГОСТ Р 50369-92 электрическим приводом называется электромеханическая система, состоящая в
Классификация электроприводов обычно производится по виду движения и управляемости, роду электрического
Классификация электроприводов обычно производится по виду движения и управляемости, роду электрического
По уровню автоматизации электроприводы можно разделить на неавтоматизированные, автоматизированные и автоматические.
По уровню автоматизации электроприводы можно разделить на неавтоматизированные, автоматизированные и автоматические.
По способу передачи механической энергии исполнительному органу
электроприводы делятся на групповые, индивидуальные
По способу передачи механической энергии исполнительному органу
электроприводы делятся на групповые, индивидуальные
Индивидуальный электропривод характеризуется тем, что каждый исполнительный орган рабочей машины приводится
Индивидуальный электропривод характеризуется тем, что каждый исполнительный орган рабочей машины приводится
Взаимосвязанный электропривод содержит два или несколько электрически или механически связанных между
Взаимосвязанный электропривод содержит два или несколько электрически или механически связанных между
Преобразовательное устройство (преобразователь электроэнергии) – электротехническое устройство, преобразующее электрическую энергию с
Преобразовательное устройство (преобразователь электроэнергии) – электротехническое устройство, преобразующее электрическую энергию с
Электродвигательное устройство (электромеханический преобразователь) – электротехническое устройство, предназначенное для преобразования электрической
Электродвигательное устройство (электромеханический преобразователь) – электротехническое устройство, предназначенное для преобразования электрической
Управляющее информационное устройство. Управляющее устройство предназначено для формирования управляющих воздействий в
Управляющее информационное устройство. Управляющее устройство предназначено для формирования управляющих воздействий в
Передаточное устройство состоит из механической передачи и устройства сопряжения. Механическая передача
Передаточное устройство состоит из механической передачи и устройства сопряжения. Механическая передача
Рабочая машина – машина, осуществляющая изменение формы, свойств, состояния и положения
Рабочая машина – машина, осуществляющая изменение формы, свойств, состояния и положения
Групповой электропривод предприятия
Особенность данной схемы в механическом распределении энергии по
Групповой электропривод предприятия
Особенность данной схемы в механическом распределении энергии по
Групповой электропривод рабочих машин
В отличии от предыдущей схемы электрическая энергия здесь
Групповой электропривод рабочих машин
В отличии от предыдущей схемы электрическая энергия здесь
К числу общих недостатков группового электропривода можно отнести:
ступенчатое регулирование скорости;
малый диапазон
К числу общих недостатков группового электропривода можно отнести:
ступенчатое регулирование скорости;
малый диапазон
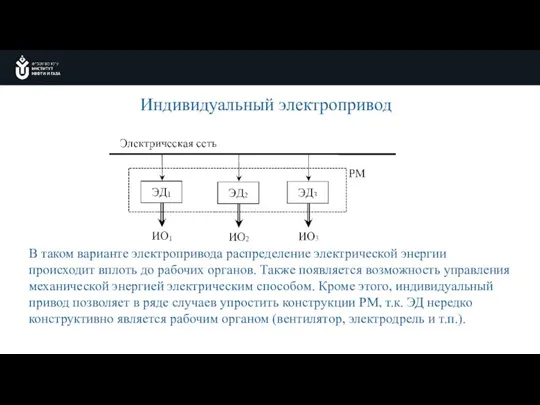
В таком варианте электропривода распределение электрической энергии происходит вплоть до рабочих
В таком варианте электропривода распределение электрической энергии происходит вплоть до рабочих
В настоящее время индивидуальный ЭП – это основной тип промышленно используемого
В настоящее время индивидуальный ЭП – это основной тип промышленно используемого
Многодвигательный электропривод – "электропривод, содержащий несколько электродвигателей, механическая связь между которыми
Многодвигательный электропривод – "электропривод, содержащий несколько электродвигателей, механическая связь между которыми
Электрический вал – "взаимосвязанный электропривод, обеспечивающий синхронное движение двух или более
Электрический вал – "взаимосвязанный электропривод, обеспечивающий синхронное движение двух или более
В настоящее время для электропривода характерна тенденция использования энергосберегающих технологий. К
В настоящее время для электропривода характерна тенденция использования энергосберегающих технологий. К
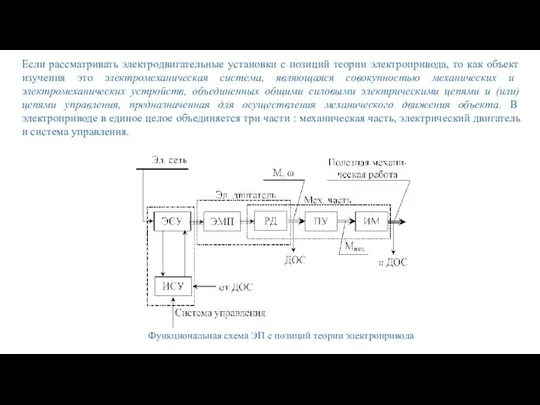
Если рассматривать электродвигательные установки с позиций теории электропривода, то как объект
Если рассматривать электродвигательные установки с позиций теории электропривода, то как объект

Механическая часть включает все движущиеся элементы механизма – ротор двигателя РД,
Механическая часть включает все движущиеся элементы механизма – ротор двигателя РД,
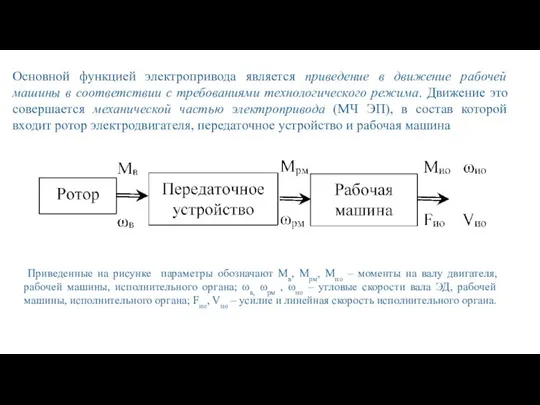
Основной функцией электропривода является приведение в движение рабочей машины в соответствии
Основной функцией электропривода является приведение в движение рабочей машины в соответствии
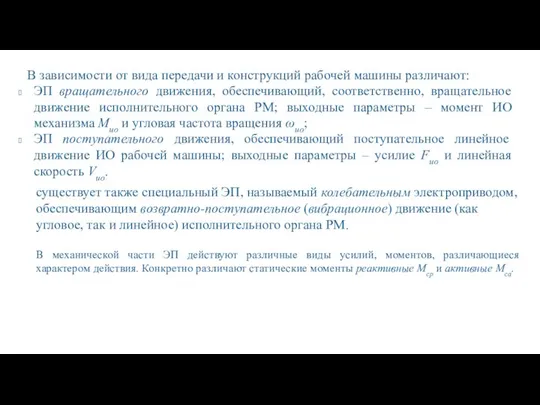
В зависимости от вида передачи и конструкций рабочей машины различают:
ЭП вращательного
В зависимости от вида передачи и конструкций рабочей машины различают:
ЭП вращательного
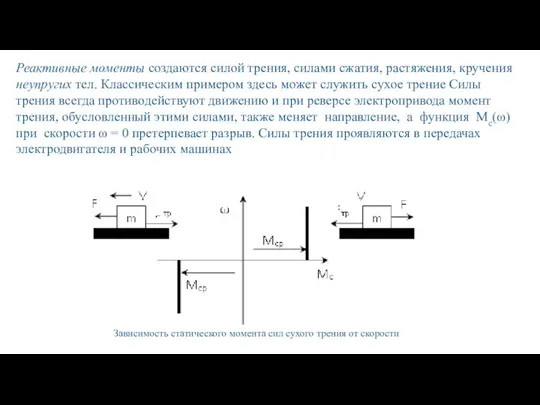
Реактивные моменты создаются силой трения, силами сжатия, растяжения, кручения неупругих тел.
Реактивные моменты создаются силой трения, силами сжатия, растяжения, кручения неупругих тел.
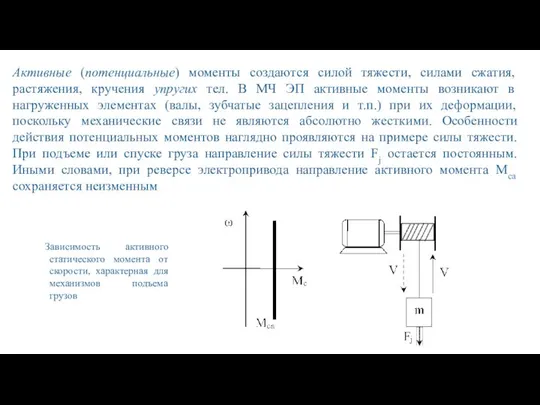
Активные (потенциальные) моменты создаются силой тяжести, силами сжатия, растяжения, кручения упругих
Активные (потенциальные) моменты создаются силой тяжести, силами сжатия, растяжения, кручения упругих
Краткий анализ видов Мс показывает, что между реактивными и активными моментами
Краткий анализ видов Мс показывает, что между реактивными и активными моментами
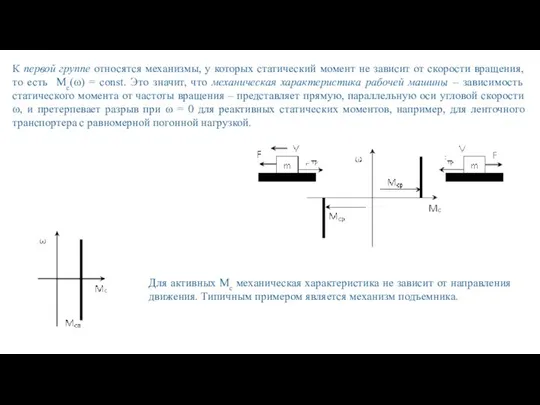
К первой группе относятся механизмы, у которых статический момент не зависит
К первой группе относятся механизмы, у которых статический момент не зависит
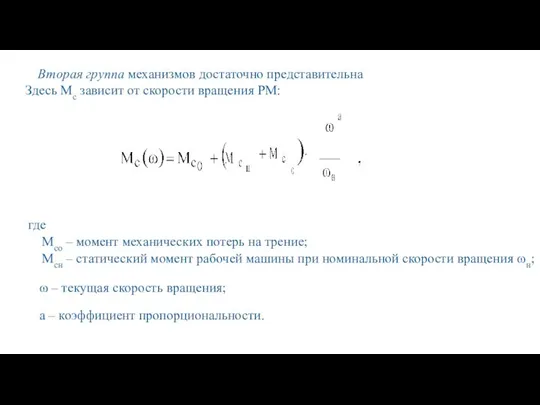
Вторая группа механизмов достаточно представительна
Здесь Мс зависит от скорости вращения
Вторая группа механизмов достаточно представительна
Здесь Мс зависит от скорости вращения
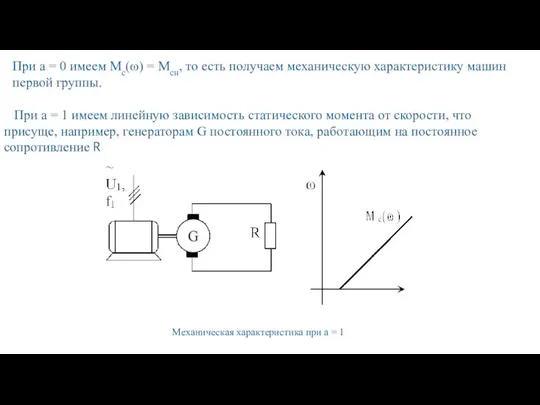
При а = 0 имеем Мс(ω) = Мсн, то есть получаем
При а = 0 имеем Мс(ω) = Мсн, то есть получаем
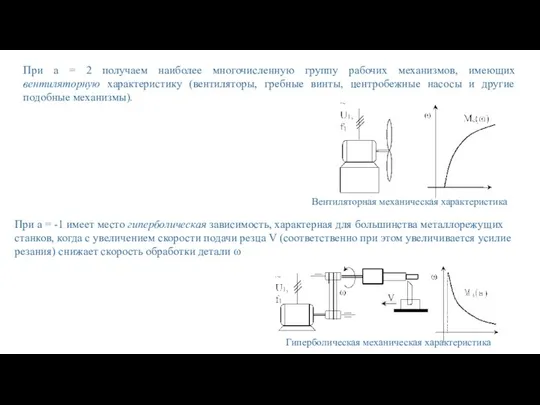
При а = 2 получаем наиболее многочисленную группу рабочих механизмов, имеющих
При а = 2 получаем наиболее многочисленную группу рабочих механизмов, имеющих
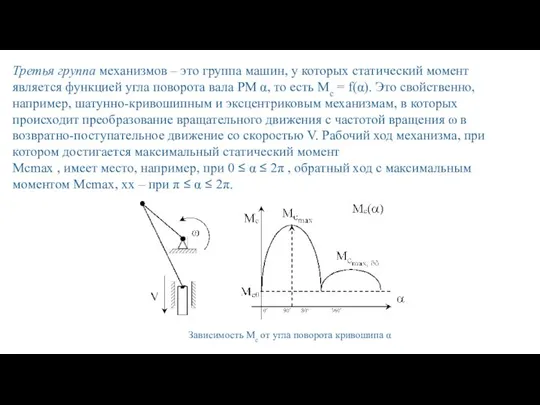
Третья группа механизмов – это группа машин, у которых статический момент
Третья группа механизмов – это группа машин, у которых статический момент
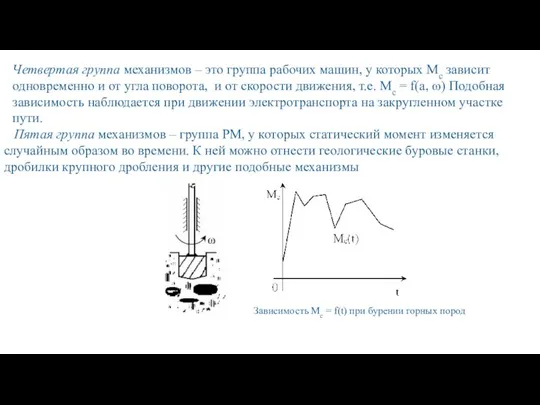
Четвертая группа механизмов – это группа рабочих машин, у которых Мс
Четвертая группа механизмов – это группа рабочих машин, у которых Мс
 Troubleshooting Instructions for Mettler Toledo Safeline
Troubleshooting Instructions for Mettler Toledo Safeline Путешествие в Грузию. Фотоальбом
Путешествие в Грузию. Фотоальбом Герметичные системы, находящиеся под давлением
Герметичные системы, находящиеся под давлением 1 тема Архитектура и дизайн. Мир, который создает
1 тема Архитектура и дизайн. Мир, который создает Критическая и максимально применяемая частоты. Методы исследования ионосферы
Критическая и максимально применяемая частоты. Методы исследования ионосферы Рисование с натуры натюрморта из фруктов и овощей
Рисование с натуры натюрморта из фруктов и овощей Виртуальный литературный час Встречаем Новый Год вместе
Виртуальный литературный час Встречаем Новый Год вместе 20130311_v_carstve_bogini_klio
20130311_v_carstve_bogini_klio Printing culture is developing
Printing culture is developing Частица с l=1. Продолжение
Частица с l=1. Продолжение Электричество в быту
Электричество в быту Вытеснение нефти из пластов горячей водой и паром
Вытеснение нефти из пластов горячей водой и паром cанынын курамы.pptx
cанынын курамы.pptx Качество изделий из железоуглеродистых сталей с оценкой их по коэрцитивной силе
Качество изделий из железоуглеродистых сталей с оценкой их по коэрцитивной силе Игра в старшем клубе. И в шутку и всерьёз Математика
Игра в старшем клубе. И в шутку и всерьёз Математика Детская площадка. Проект
Детская площадка. Проект Герои Донецкой Народной Республики
Герои Донецкой Народной Республики Стандарт внешнего вида десертов (пирожок, сырник)
Стандарт внешнего вида десертов (пирожок, сырник) Геоинформационные системы
Геоинформационные системы Псалом 15. Сохрани меня, Господи
Псалом 15. Сохрани меня, Господи Технологічний процес пиляння фанери та ДВП ножівкою та лобзиком
Технологічний процес пиляння фанери та ДВП ножівкою та лобзиком Робот уборщик
Робот уборщик Изонить. Прошивание ромба
Изонить. Прошивание ромба Классификация прокатных станов по расположению валков. Лекция 4
Классификация прокатных станов по расположению валков. Лекция 4 звук а, один-много
звук а, один-много Система питания электроэнергией автомобиля
Система питания электроэнергией автомобиля Қаланың ашық кеңістіктерінің функционалдық құрылымын талдау
Қаланың ашық кеңістіктерінің функционалдық құрылымын талдау Особенности введения беременности, родов и послеродового периода при гипотиреозе
Особенности введения беременности, родов и послеродового периода при гипотиреозе