- Блок Вращение мотора

Содержание
- 2. Используйте «Выбор порта» в верхней части блока для выбора порта мотора модуля EV3 (A, B, C
- 3. Блок «Вращение мотора» Выбор порта Выбор режима Вводы Выводы Используйте «Выбор порта» в верхней части блока
- 4. Ветвление Сравниваться могут как количество градусов, на которые повернулась ось мотора, так и количество оборотов. Также
- 5. Сброс замера показаний По-умолчанию, показания датчика накапливаются с момента старта робота. Т.е. можно в любой момент
- 6. Задание «Умная парковка» Робот должен найти пространство для парковки между двумя «автомобилями» и выполнить заезд в
- 8. Скачать презентацию
Используйте «Выбор порта» в верхней части блока для выбора порта мотора
Используйте «Выбор порта» в верхней части блока для выбора порта мотора
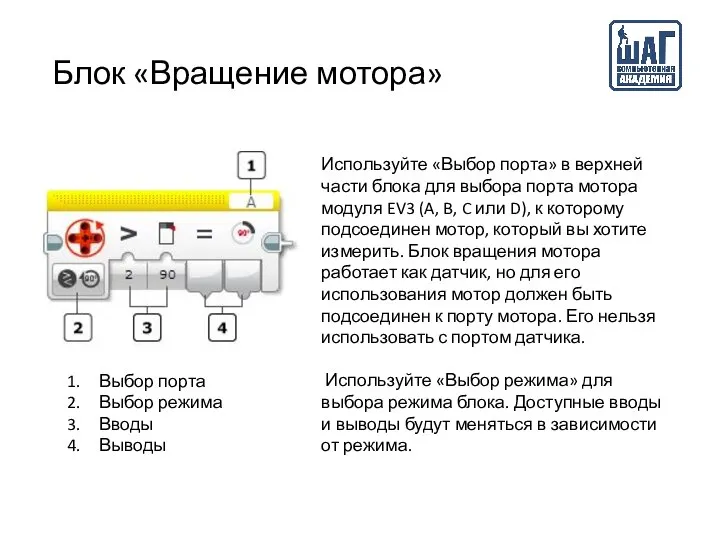
Блок «Вращение мотора»
Выбор порта
Выбор режима
Вводы
Выводы
Используйте «Выбор порта» в
Блок «Вращение мотора»
Выбор порта
Выбор режима
Вводы
Выводы
Используйте «Выбор порта» в

Ветвление
Сравниваться могут как количество градусов, на которые повернулась ось мотора, так
Ветвление
Сравниваться могут как количество градусов, на которые повернулась ось мотора, так
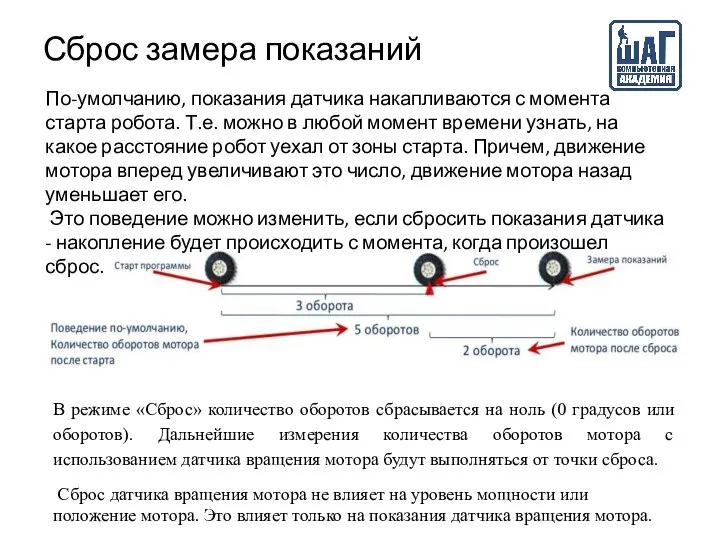
Сброс замера показаний
По-умолчанию, показания датчика накапливаются с момента старта робота. Т.е.
Сброс замера показаний
По-умолчанию, показания датчика накапливаются с момента старта робота. Т.е.
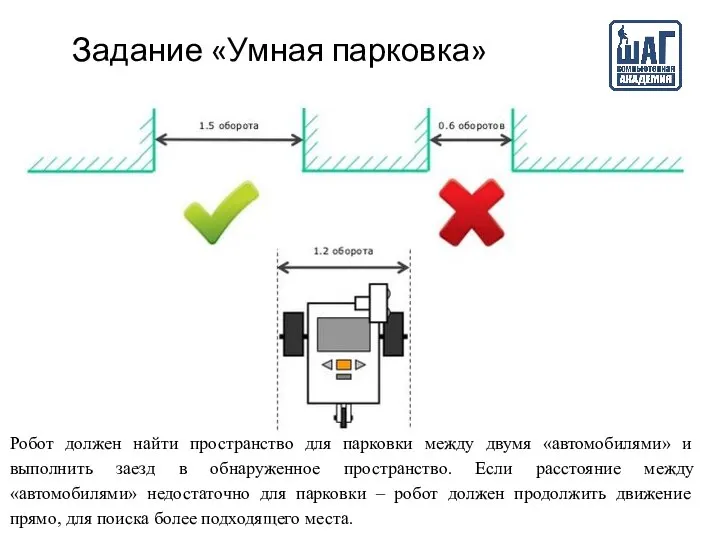
Задание «Умная парковка»
Робот должен найти пространство для парковки между двумя «автомобилями»
Задание «Умная парковка»
Робот должен найти пространство для парковки между двумя «автомобилями»
 Приборы контроля параметров технологических процессов. Тема 1
Приборы контроля параметров технологических процессов. Тема 1 13_08 (1)
13_08 (1) 20140402_praktikumprezentatsiya
20140402_praktikumprezentatsiya LH51 ремонт
LH51 ремонт Цифровая подстанция. Состояние и перспективы развития
Цифровая подстанция. Состояние и перспективы развития 20180911_prezentatsiya
20180911_prezentatsiya 55 лет
55 лет Религия. Знакомство
Религия. Знакомство Транспортная система Гамбурга
Транспортная система Гамбурга Портфолио обучающегося
Портфолио обучающегося Шығармашылығы әртүрлі
Шығармашылығы әртүрлі Коммутаторы. Характеристики, влияющие на производительность коммутаторов
Коммутаторы. Характеристики, влияющие на производительность коммутаторов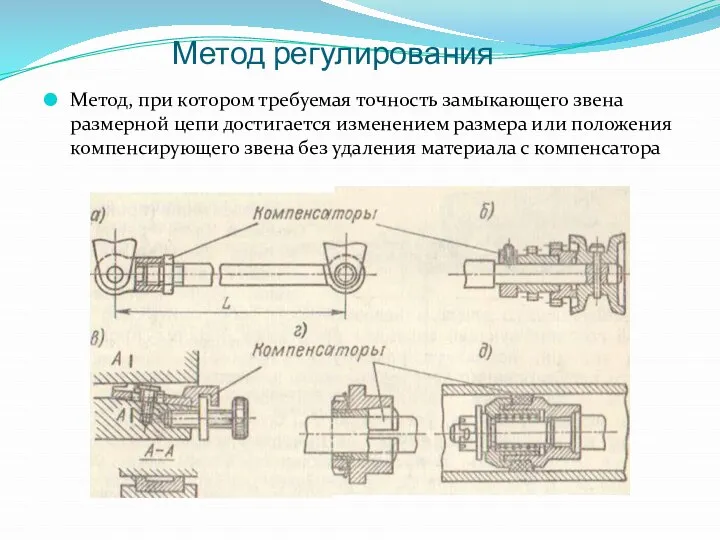 Метод регулирования
Метод регулирования 20180213_polet_na_planetu_matematika_i_fantaziya_0
20180213_polet_na_planetu_matematika_i_fantaziya_0 klassifikatsiya_staley_i_termicheskaya_obrabotka
klassifikatsiya_staley_i_termicheskaya_obrabotka 20120226_prirodovedenie_5_kl.__veshchestva_vyrabatyvaemye_rasteniyami
20120226_prirodovedenie_5_kl.__veshchestva_vyrabatyvaemye_rasteniyami Веселое лето доборы
Веселое лето доборы найди соседей
найди соседей Византия Презентация
Византия Презентация Асыл-Мерей ішкі сауда объектісіне сатуға түскен ешкі етінің сапасын анықтау
Асыл-Мерей ішкі сауда объектісіне сатуға түскен ешкі етінің сапасын анықтау Свойства черных и цветных металлов
Свойства черных и цветных металлов ерекше
ерекше Зарядка - залог хорошей физической формы и отличного настроения!!!
Зарядка - залог хорошей физической формы и отличного настроения!!! Innovations in MFLT
Innovations in MFLT СВОЯ ИГРА Лесенка здоровья шаблон
СВОЯ ИГРА Лесенка здоровья шаблон Что такое красота
Что такое красота Поэтапное рисование части тела. Глаза
Поэтапное рисование части тела. Глаза 20150118_organy_dykhaniya
20150118_organy_dykhaniya