- Boston Dynamics

Содержание
- 2. BOSTON DYNAMICS БЫЛА СОЗДАНА ПРОФЕССОРОМ МАРКОМ РАЙБЕРТОМ В 1992 ГОДУ. ДО ЭТОГО МАРК БЫЛ ИЗВЕСТЕН КАК
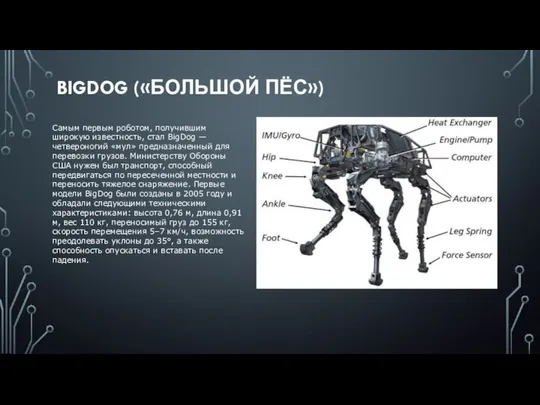
- 3. BIGDOG («БОЛЬШОЙ ПЁС») Самым первым роботом, получившим широкую известность, стал BigDog — четвероногий «мул» предназначенный для
- 4. «Большой пёс» представляет собой сложную автономную систему, работающую от двигателя внутреннего сгорания мощностью 15 л.с., и
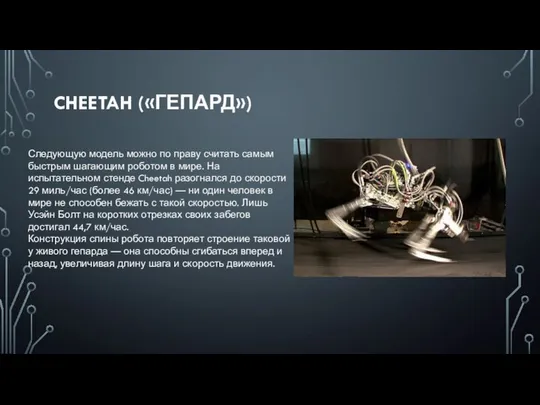
- 5. CHEETAH («ГЕПАРД») Следующую модель можно по праву считать самым быстрым шагающим роботом в мире. На испытательном
- 6. SAND FLEA («ПЕСЧАНАЯ БЛОХА») Sand Flea представляет собой компактную четырехколесную платформу. Вес машины составляет около 5,5
- 7. SPOT По сравнению с BigDog машины лишились двигателя внутреннего сгорания и обзавелись электродвигателем с гидроприводом и
- 8. ATLAS («АТЛАНТ, ТИТАН») Его рост составляет 1,5 метра, вес 75 кг, в его конструкции используется 28
- 10. Скачать презентацию
BOSTON DYNAMICS БЫЛА СОЗДАНА ПРОФЕССОРОМ МАРКОМ РАЙБЕРТОМ В 1992 ГОДУ. ДО
BOSTON DYNAMICS БЫЛА СОЗДАНА ПРОФЕССОРОМ МАРКОМ РАЙБЕРТОМ В 1992 ГОДУ. ДО
BIGDOG («БОЛЬШОЙ ПЁС»)
Самым первым роботом, получившим широкую известность, стал BigDog —
BIGDOG («БОЛЬШОЙ ПЁС»)
Самым первым роботом, получившим широкую известность, стал BigDog —
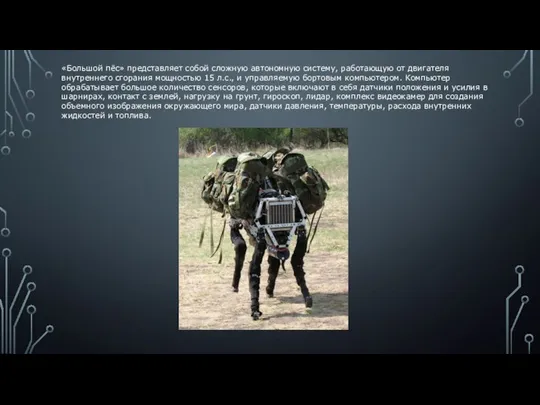
«Большой пёс» представляет собой сложную автономную систему, работающую от двигателя внутреннего
«Большой пёс» представляет собой сложную автономную систему, работающую от двигателя внутреннего
CHEETAH («ГЕПАРД»)
Следующую модель можно по праву считать самым быстрым шагающим роботом
CHEETAH («ГЕПАРД»)
Следующую модель можно по праву считать самым быстрым шагающим роботом
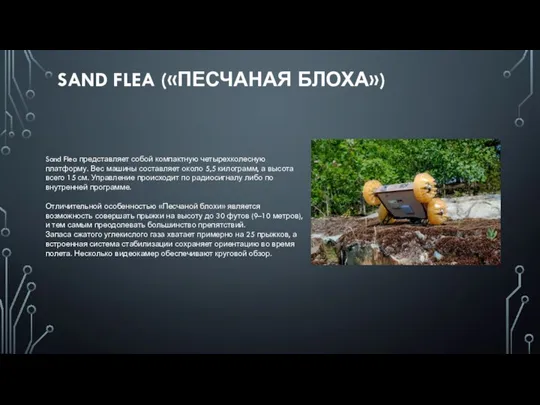
SAND FLEA («ПЕСЧАНАЯ БЛОХА»)
Sand Flea представляет собой компактную четырехколесную платформу. Вес
SAND FLEA («ПЕСЧАНАЯ БЛОХА»)
Sand Flea представляет собой компактную четырехколесную платформу. Вес
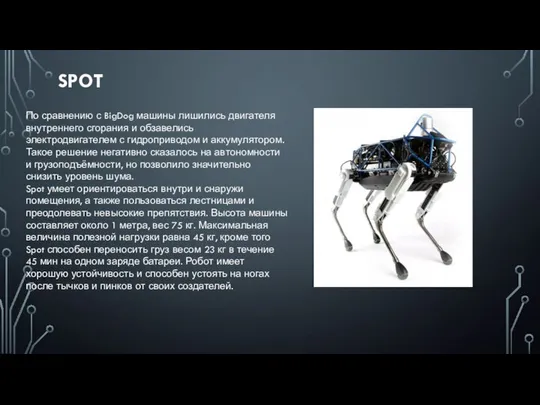
SPOT
По сравнению с BigDog машины лишились двигателя внутреннего сгорания и обзавелись
SPOT
По сравнению с BigDog машины лишились двигателя внутреннего сгорания и обзавелись
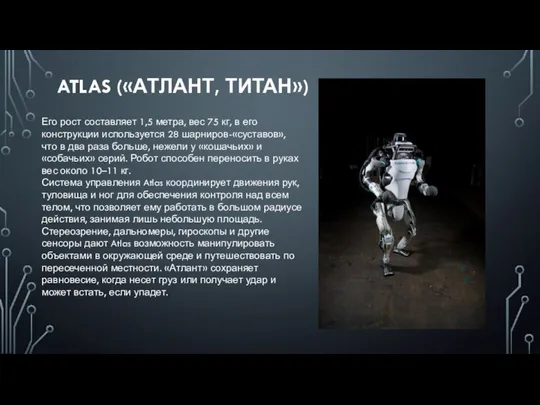
ATLAS («АТЛАНТ, ТИТАН»)
Его рост составляет 1,5 метра, вес 75 кг, в
ATLAS («АТЛАНТ, ТИТАН»)
Его рост составляет 1,5 метра, вес 75 кг, в
 Дар воды квест
Дар воды квест Великдень. Свято Пасхи
Великдень. Свято Пасхи Completiva directa. Propoziţia completivă directă -CD
Completiva directa. Propoziţia completivă directă -CD чтение битва с пчелами
чтение битва с пчелами РМО дистанция 23.03.2020 г
РМО дистанция 23.03.2020 г Анализ состояния разработки Черничного месторождения
Анализ состояния разработки Черничного месторождения таблички на день поля КАРТОШКА (1)
таблички на день поля КАРТОШКА (1) Планирование рекламных мероприятий для продвижения организации на примере отеля Ibis
Планирование рекламных мероприятий для продвижения организации на примере отеля Ibis Dostoprimechatelnosti
Dostoprimechatelnosti Основные подходы к терапии СД 1 типа
Основные подходы к терапии СД 1 типа Относительность одновременности
Относительность одновременности Схема электропроводки квартиры - дома
Схема электропроводки квартиры - дома Моя семья
Моя семья Области применения и особенности проектирования программируемой аналоговой интегральной схемы КомПАС-1 (5400ТР035)
Области применения и особенности проектирования программируемой аналоговой интегральной схемы КомПАС-1 (5400ТР035) Мониторы. Принцип работы ЭЛТ монитора
Мониторы. Принцип работы ЭЛТ монитора 20160115_zvezdnyy_chas
20160115_zvezdnyy_chas Эннеаграмме человека
Эннеаграмме человека ТОС НА НАБЕРЕЖНОЙ
ТОС НА НАБЕРЕЖНОЙ Fashion of the United States of America in the 80s
Fashion of the United States of America in the 80s Шахтные вагонетки
Шахтные вагонетки Презентация ИЗО
Презентация ИЗО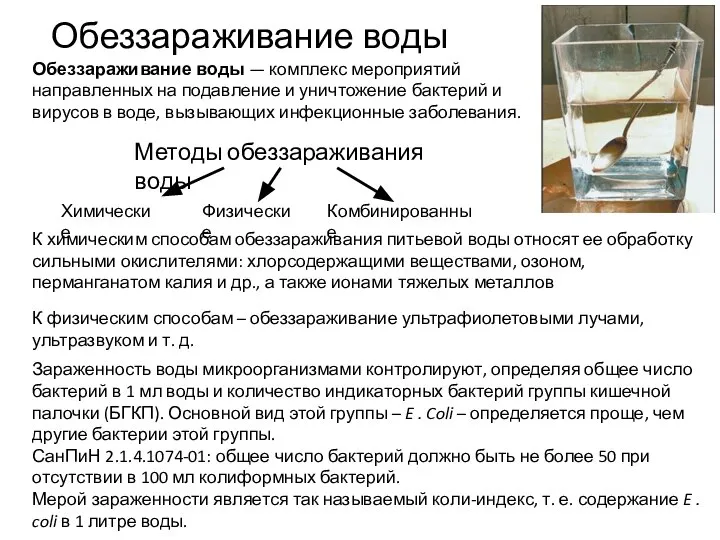 Обеззараживание воды. Лекция 111
Обеззараживание воды. Лекция 111 c794b18c6edbeb069a3764451eb9c0a0
c794b18c6edbeb069a3764451eb9c0a0 Өсімдік майының түрлері және сапасына қойылатын талаптар
Өсімдік майының түрлері және сапасына қойылатын талаптар Применение дробей при решении задач
Применение дробей при решении задач Железобетонные конструкции в условиях особых нагрузок
Железобетонные конструкции в условиях особых нагрузок Теплогазоснабжение и вентиляция. Лекция 4
Теплогазоснабжение и вентиляция. Лекция 4 Городской конкурс опекунов (попечителей) и приёмных семей
Городской конкурс опекунов (попечителей) и приёмных семей