- Директорное и автоматическое управление боковым траекторным движением при заходе на посадку

Содержание
- 2. Осуществление управления самолетом может происходить одним из известных способов: ручном (штурвальном), автоматическом , директорном, совмещенным и
- 3. Основные способы управления траекторным движением самолета при заходе на посадку: ручное (штурвальное) Пилот по наземным ориентирам
- 4. Промежуточные полуавтоматические режимы управления траекторным движением самолета: директорное автоматизирована обработка информации, ее комплексирование и формирование директорного
- 5. 14.1. Основной критерий классификация систем посадки Основным критерием классификации систем посадки самолета является их способность обеспечивать
- 6. Под дальностью видимости понимается максимальное расстояние в направлении посадки, на котором ВПП или установленные огни, ограничивающие
- 7. Этапы захода на посадку в соответствии с понятием метеоминимума. Первый происходит в условиях отсутствия видимости земли
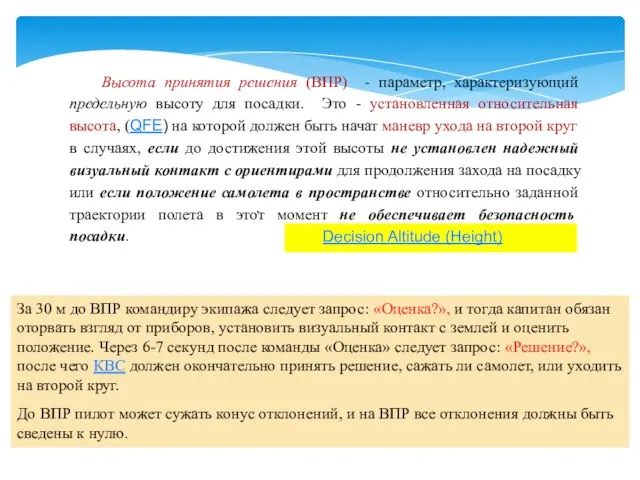
- 8. . Высота принятия решения (ВПР) - параметр, характеризующий предельную высоту для посадки. Это - установленная относительная
- 9. Международной организацией ИКАО введены категории посадочных минимумов (категории посадки), каждая из которых характеризуется высотой принятия решения
- 10. Метеоминимумы ИКАО Категории заходов на посадку Таблица3.1 Снижение посадочных минимумов позволяет повысить регулярность полетов, но усложняет
- 11. Таблица 1.1 – Категории точных заходов на посадку
- 12. делятся на I,II,IIIA,IIIB и IIIC категории: CAT I - точный заход на посадку и посадка по
- 13. 14.2 Классификация применяемых систем посадки. Параметры движения самолета при заходе на посадку по радиотехническим системам посадки
- 14. В настоящее время широкое распространение получили только радиотехнические курсоглиссадные средства посадки Системы СП-50, СП-75, СП-80, СП-90,
- 15. а) курсо-глиссадные системы – обеспечивают формирование траектории посадки (рис. 1), как пересечение двух плоскостей, построенных излучением
- 18. Схема размещения радиомаяков радиотехнической системы посадки СП-50 (ILS) КРМ ДПРС БПРС ГРМ ГРМ МРМ МРМ КРМ
- 19. В состав бортового комплекса входят: курсовой, глиссадный и маркерный радиоприемники (КРП, ГРП и МРП) (система «Курс-МП»)
- 20. В настоящее время заход на посадку и посадка в ᴄᴫᴏжных условиях при пониженной RVR(дальность видимости) осуществляется
- 21. MLS- это система посадки сантиметрового диапазона представляет собой угломерно-дальномерную систему.
- 22. Бортовое радиотехническое оборудование посадки MLS должно обеспечивать при работе с наземными маяками: определение положения ЛА по
- 23. Микроволновая система посадки представляет собой комплекс бортового и наземного оборудования. В бортовое оборудование входят: Ø угломерные
- 24. Рис.10. Зона действия маяка MLS: а) в горизонтальной плоскости; б) в вертикальной плоскости; 1 – заход
- 25. WAAS ( wide area augmentation system) — система распространения поправок к данным, передаваемым навигационной системой GPS.
- 27. 14.3 Директорное управление самолетом на этапе захода на посадку Под ручным управлением подразумевается такое управление ,
- 28. Средства отображения информации и органы управления ЛА, размещенные в кабине экипажа, образуют информационно-управляющее поле кабины. Для
- 29. Классификация ошибочных действий летчика
- 30. Модель пилота описывается последовательным соединением пяти элементарных звеньев. Первое звено kп характеризует коэффициент передачи пилота как
- 31. Поиск путей совершенствования контуров управления ЛА с участием человека привел в свое время к так называемому
- 32. Траекторию полета самолета в пространстве можно рассматривать состоящей из двух составляющих: в горизонтальной и вертикальной плоскостях.
- 33. Переход к автоматическому управлению происходит путем подключения основного вычислителя к сервоприводу каналов автоматического управления Связь директорного
- 34. Первый способ предполагает использование командных индексов, на которые подаются сигналы, пропорциональные углам крена и тангажа. В
- 35. Второй способ, получивший большее распространение, предполагает использование командных стрелок, на которые подаются сигналы, пропорциональные разности заданного
- 36. Пилот осуществляет операцию интегрирования сигнала положения стрелки и реализует при этом передаточную функцию В директорной системе
- 37. Управление боковым траекторным движением самолета при заходе на посадку производится пилотом визуально по наземным ориентирам и
- 38. Выведение самолета в заданную точку на продолжении осевой линии ВПП S в горизонтальной плоскости осуществляется в
- 39. II этап («возврат радийный») включается автоматически при появлении устойчивого сигнала от наземного РМ. Заданный курс формируется
- 41. 14.5 Система директорного управления угловым отклонением от равносигнальной линии курса (СДУ ) Закон управления командной стрелкой
- 42. передаточные коэффициенты по углу крена соответственно на угловое отклонение самолета от равносигнальной линии курса и на
- 43. Функциональная схема системы директорного управления угловым отклонением от равносигнальной линии курса Состав системы: датчик текущего угла
- 44. Процесс выхода самолета на ось ВПП Вычислитель СТУ формирует сигнал , складывает его с сигналом .
- 45. Значение угла подхода , с которым самолет приближается к ВПП, выбирается в пределах 28-30°. В точке
- 46. При заходе на посадку с боковым ветром самолет отклоняется от оси ВПП. За счет возникающих при
- 47. 11.6 Система автоматического управления угловым отклонением от равносигнальной линии курса САУ обеспечивает стабилизацию и управление боковым
- 48. Наиболее целесообразной координатой управления боковым движением самолета является угол крена. Это объясняется, во-первых, тем, что в
- 49. пропорциональное управление только по сигналу не обеспечивает демпфирование траекторных колебаний самолета относительно равносигнальной линии курса. Более
- 50. Первый способ коррекции основывается на ослаблении сигнала, снимаемого с КРМ по мере приближения к нему самолета
- 51. Вследствие разброса крутизны сигнала РТС из-за различной геометрии расположения КРМ относительно ВПП, различной длины ВПП, влияния
- 52. Наличие высокочастотной составляющей помехи в сигнале существенно затрудняет процесс пилотирования самолета при заходе на посадку. Фильтрация
- 53. Уменьшив действие высокочастотной составляющей помехи с помощью фильтров, мы ввели запаздывание в сигнал Мера по компенсации
- 54. На этапе захода на посадку предъявляются очень жесткие требования к точности выдерживания траектории. Поэтому необходимо обеспечить
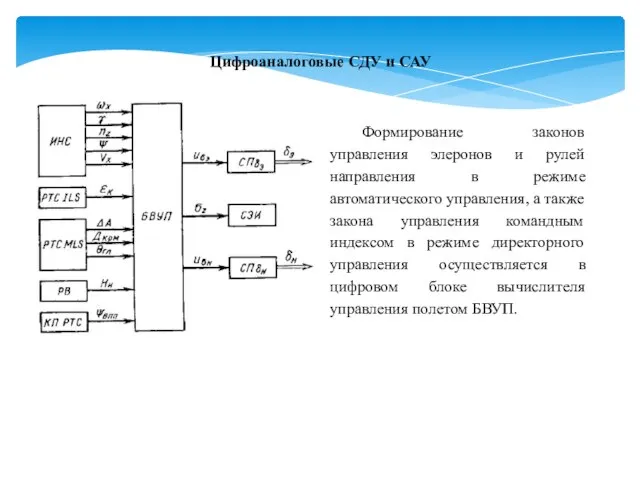
- 55. Цифроаналоговые СДУ и САУ Формирование законов управления элеронов и рулей направления в режиме автоматического управления, а
- 56. Можно обеспечить астатизм введением в закон управления сигнала, пропорционального интегралу углового отклонения от равносигнальной линии курса
- 58. Скачать презентацию
Осуществление управления самолетом может происходить одним из известных способов: ручном (штурвальном),
Осуществление управления самолетом может происходить одним из известных способов: ручном (штурвальном),
Основные способы управления траекторным движением самолета при заходе на посадку:
ручное
Основные способы управления траекторным движением самолета при заходе на посадку:
ручное
Промежуточные полуавтоматические режимы управления траекторным движением самолета:
директорное
автоматизирована обработка информации,
Промежуточные полуавтоматические режимы управления траекторным движением самолета:
директорное
автоматизирована обработка информации,
14.1. Основной критерий классификация систем посадки
Основным критерием классификации систем посадки самолета
14.1. Основной критерий классификация систем посадки
Основным критерием классификации систем посадки самолета

Под дальностью видимости понимается максимальное расстояние в направлении посадки, на котором
Под дальностью видимости понимается максимальное расстояние в направлении посадки, на котором

Этапы захода на посадку в соответствии с понятием метеоминимума.
Первый происходит
Этапы захода на посадку в соответствии с понятием метеоминимума.
Первый происходит
.
Высота принятия решения (ВПР) - параметр, характеризующий предельную высоту для посадки.
.
Высота принятия решения (ВПР) - параметр, характеризующий предельную высоту для посадки.
Международной организацией ИКАО введены категории посадочных минимумов (категории посадки), каждая из
Международной организацией ИКАО введены категории посадочных минимумов (категории посадки), каждая из
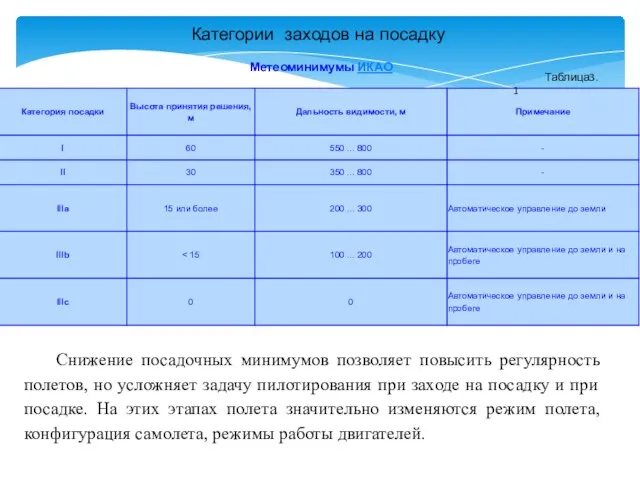
Метеоминимумы ИКАО
Категории заходов на посадку
Таблица3.1
Снижение посадочных минимумов позволяет повысить регулярность полетов,
Метеоминимумы ИКАО
Категории заходов на посадку
Таблица3.1
Снижение посадочных минимумов позволяет повысить регулярность полетов,
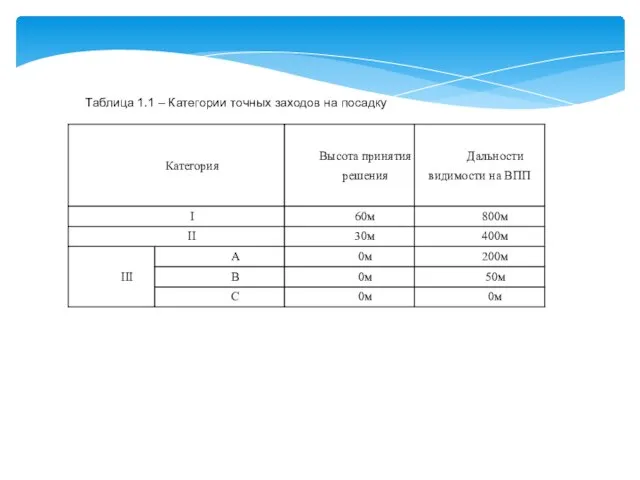
Таблица 1.1 – Категории точных заходов на посадку
Таблица 1.1 – Категории точных заходов на посадку
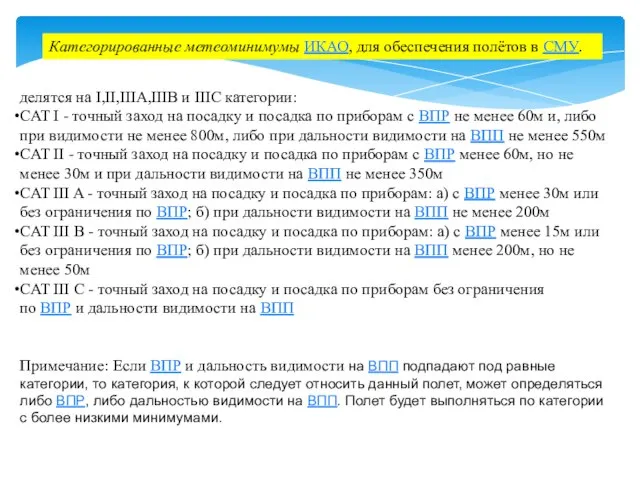
делятся на I,II,IIIA,IIIB и IIIC категории:
CAT I - точный заход на
делятся на I,II,IIIA,IIIB и IIIC категории:
CAT I - точный заход на

14.2 Классификация применяемых систем посадки. Параметры движения самолета при заходе на
14.2 Классификация применяемых систем посадки. Параметры движения самолета при заходе на

В настоящее время широкое распространение получили только радиотехнические курсоглиссадные средства посадки
Системы
В настоящее время широкое распространение получили только радиотехнические курсоглиссадные средства посадки
Системы
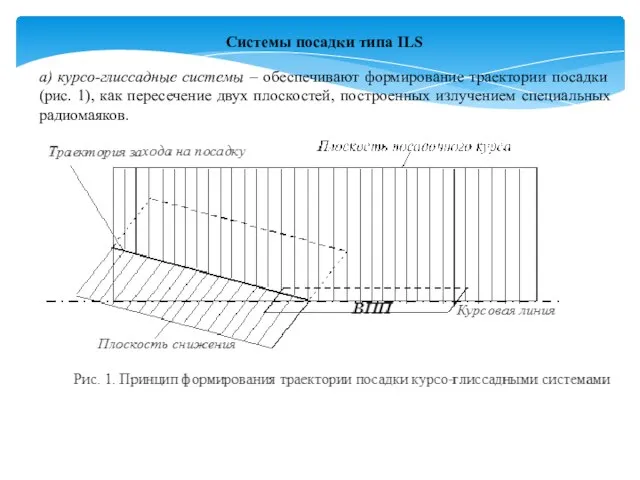
а) курсо-глиссадные системы – обеспечивают формирование траектории посадки (рис. 1), как
а) курсо-глиссадные системы – обеспечивают формирование траектории посадки (рис. 1), как
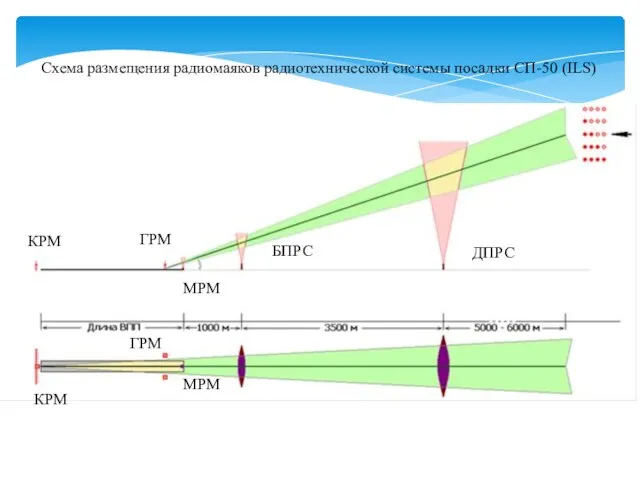
Схема размещения радиомаяков радиотехнической системы посадки СП-50 (ILS)
КРМ
ДПРС
БПРС
ГРМ
ГРМ
МРМ
МРМ
КРМ
Схема размещения радиомаяков радиотехнической системы посадки СП-50 (ILS)
КРМ
ДПРС
БПРС
ГРМ
ГРМ
МРМ
МРМ
КРМ
В состав бортового комплекса входят: курсовой, глиссадный и маркерный радиоприемники (КРП,
В состав бортового комплекса входят: курсовой, глиссадный и маркерный радиоприемники (КРП,
В настоящее время заход на посадку и посадка в ᴄᴫᴏжных условиях
В настоящее время заход на посадку и посадка в ᴄᴫᴏжных условиях
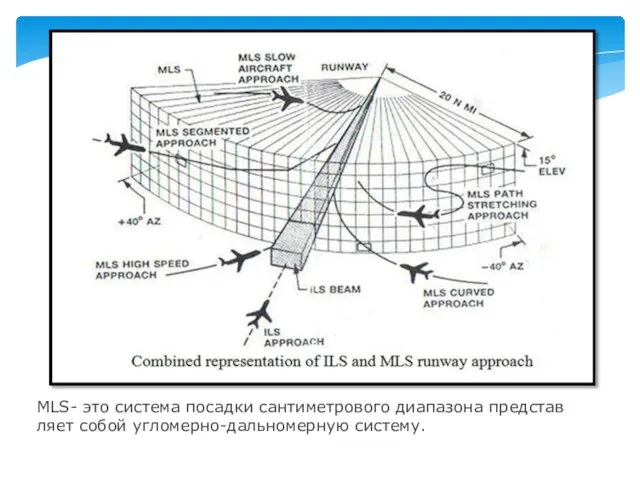
MLS- это система посадки сантиметрового диапазона представляет собой угломерно-дальномерную систему.
MLS- это система посадки сантиметрового диапазона представляет собой угломерно-дальномерную систему.

Бортовое радиотехническое оборудование посадки MLS должно обеспечивать при работе с наземными
Бортовое радиотехническое оборудование посадки MLS должно обеспечивать при работе с наземными
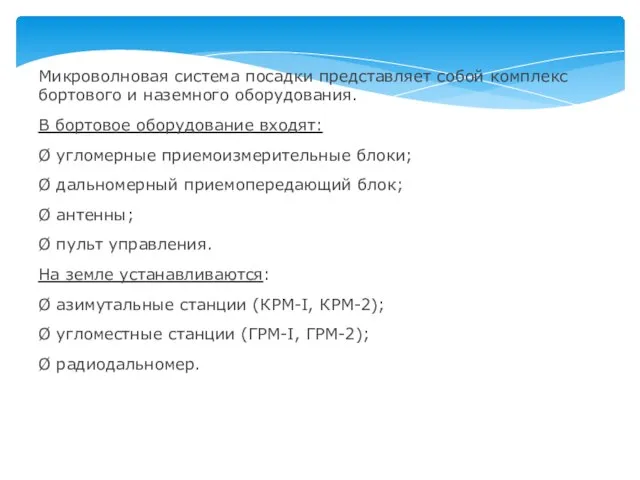
Микроволновая система посадки представляет собой комплекс бортового и наземного оборудования.
В бортовое
Микроволновая система посадки представляет собой комплекс бортового и наземного оборудования.
В бортовое

Рис.10. Зона действия маяка MLS: а) в горизонтальной плоскости; б) в
Рис.10. Зона действия маяка MLS: а) в горизонтальной плоскости; б) в
WAAS ( wide area augmentation system) — система распространения поправок к данным, передаваемым навигационной системой GPS.
WAAS ( wide area augmentation system) — система распространения поправок к данным, передаваемым навигационной системой GPS.

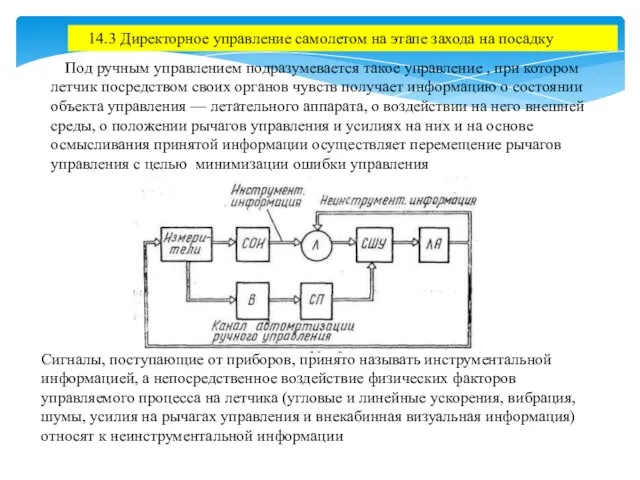
14.3 Директорное управление самолетом на этапе захода на посадку
Под ручным управлением
14.3 Директорное управление самолетом на этапе захода на посадку
Под ручным управлением

Средства отображения информации и органы управления ЛА, размещенные в кабине экипажа,
Средства отображения информации и органы управления ЛА, размещенные в кабине экипажа,
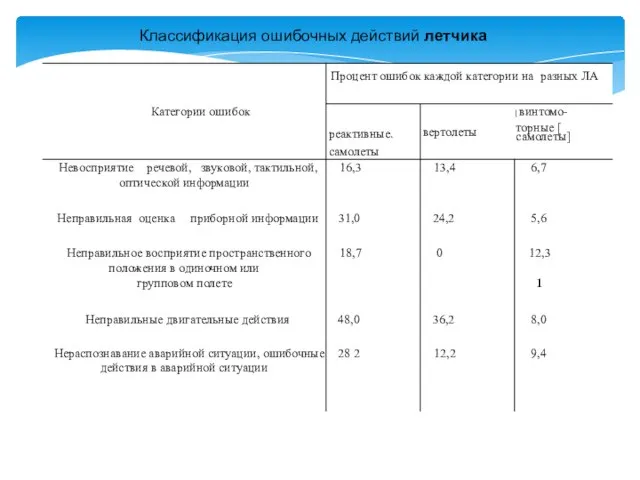
Классификация ошибочных действий летчика
Классификация ошибочных действий летчика
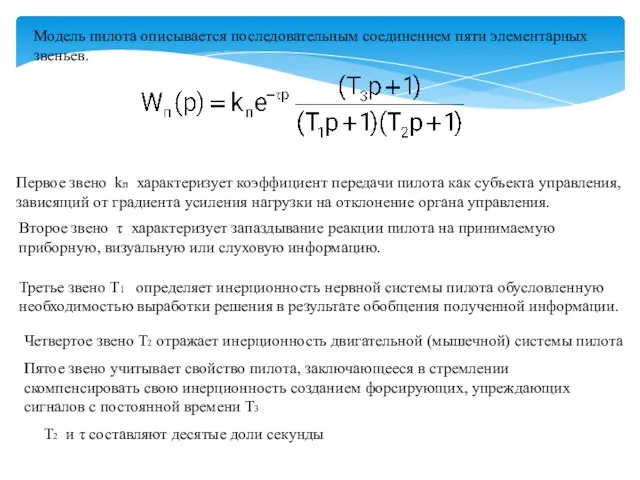
Модель пилота описывается последовательным соединением пяти элементарных звеньев.
Первое звено kп характеризует
Модель пилота описывается последовательным соединением пяти элементарных звеньев.
Первое звено kп характеризует
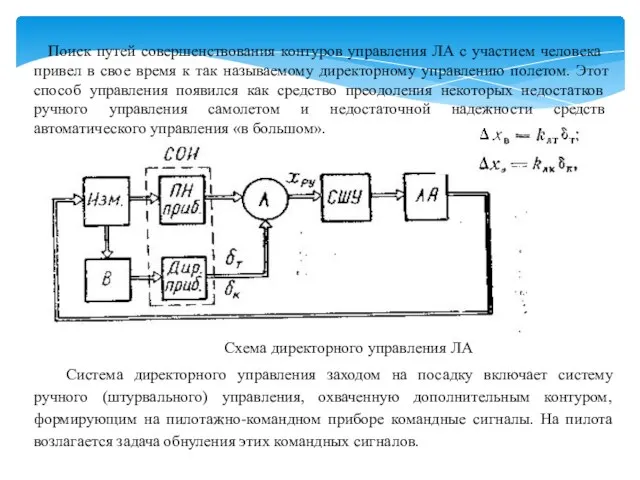
Поиск путей совершенствования контуров управления ЛА с участием человека привел в
Поиск путей совершенствования контуров управления ЛА с участием человека привел в

Траекторию полета самолета в пространстве можно рассматривать состоящей из двух составляющих:
Траекторию полета самолета в пространстве можно рассматривать состоящей из двух составляющих:

Переход к автоматическому управлению происходит путем подключения основного вычислителя к сервоприводу
Переход к автоматическому управлению происходит путем подключения основного вычислителя к сервоприводу

Первый способ предполагает использование командных индексов, на которые подаются сигналы, пропорциональные
Первый способ предполагает использование командных индексов, на которые подаются сигналы, пропорциональные

Второй способ, получивший большее распространение, предполагает использование командных стрелок, на которые
Второй способ, получивший большее распространение, предполагает использование командных стрелок, на которые
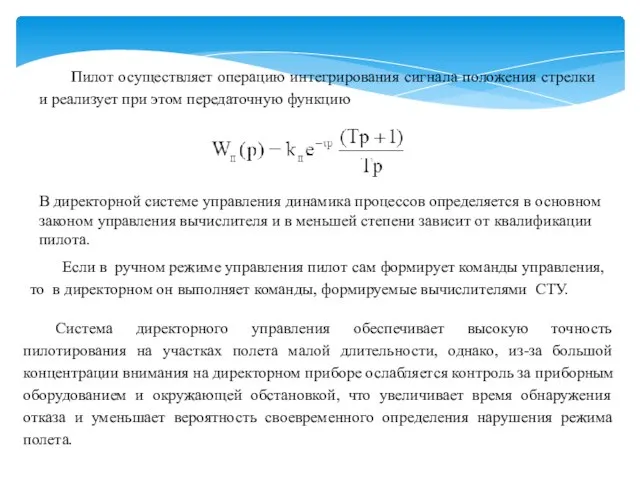
Пилот осуществляет операцию интегрирования сигнала положения стрелки и реализует при этом
Пилот осуществляет операцию интегрирования сигнала положения стрелки и реализует при этом
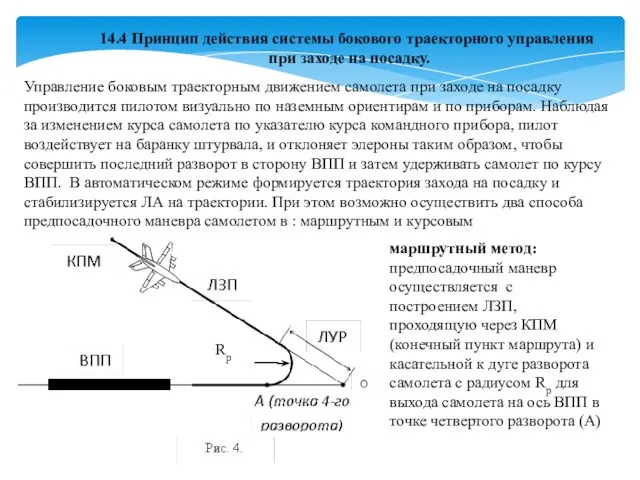
Управление боковым траекторным движением самолета при заходе на посадку производится пилотом
Управление боковым траекторным движением самолета при заходе на посадку производится пилотом

Выведение самолета в заданную точку на продолжении осевой линии ВПП S
Выведение самолета в заданную точку на продолжении осевой линии ВПП S
II этап («возврат радийный») включается автоматически при появлении устойчивого сигнала от
II этап («возврат радийный») включается автоматически при появлении устойчивого сигнала от

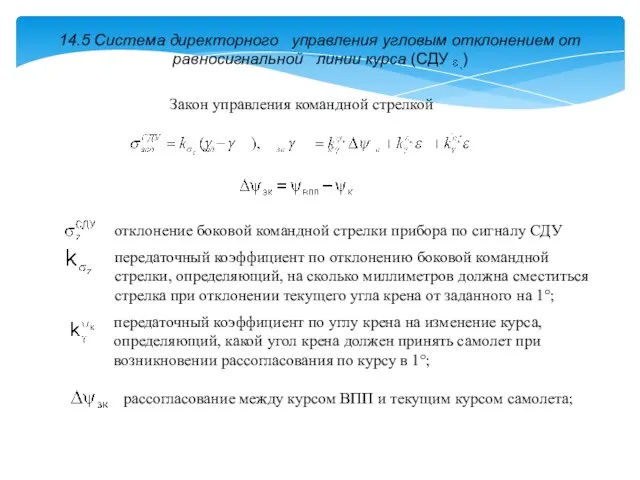
14.5 Система директорного управления угловым отклонением от
равносигнальной линии курса (СДУ
14.5 Система директорного управления угловым отклонением от
равносигнальной линии курса (СДУ
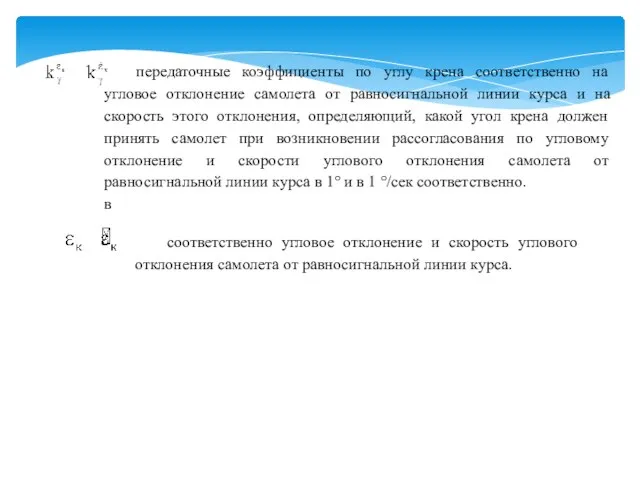
передаточные коэффициенты по углу крена соответственно на угловое отклонение самолета от
передаточные коэффициенты по углу крена соответственно на угловое отклонение самолета от
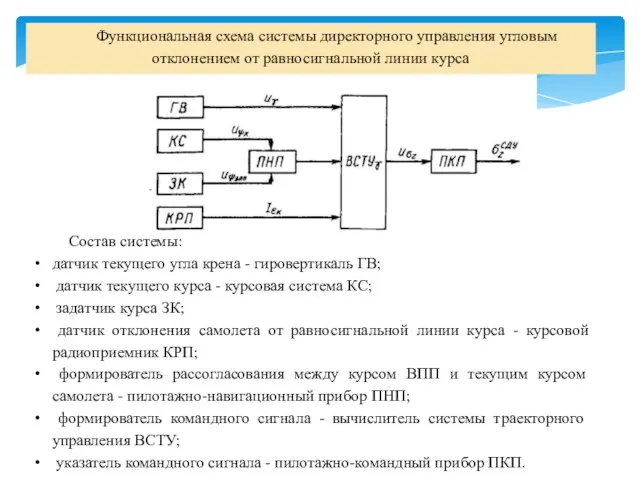
Функциональная схема системы директорного управления угловым отклонением от равносигнальной линии курса
Функциональная схема системы директорного управления угловым отклонением от равносигнальной линии курса
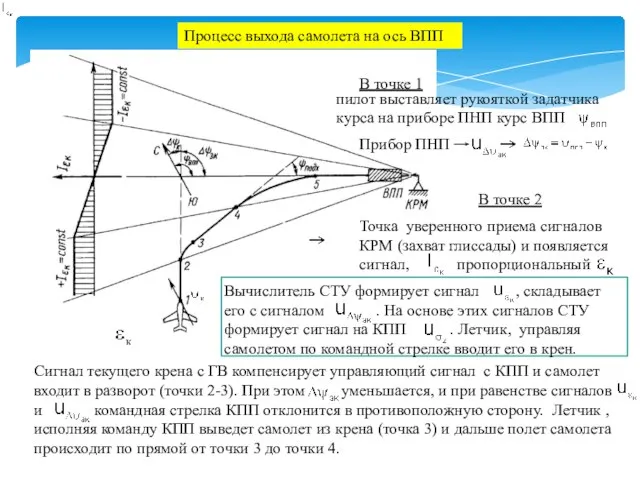
Процесс выхода самолета на ось ВПП
Вычислитель СТУ формирует сигнал ,
Процесс выхода самолета на ось ВПП
Вычислитель СТУ формирует сигнал ,

Значение угла подхода , с которым самолет приближается к ВПП, выбирается
Значение угла подхода , с которым самолет приближается к ВПП, выбирается
При заходе на посадку с боковым ветром самолет отклоняется от оси
При заходе на посадку с боковым ветром самолет отклоняется от оси

11.6 Система автоматического управления угловым отклонением от равносигнальной линии курса САУ
11.6 Система автоматического управления угловым отклонением от равносигнальной линии курса САУ
Наиболее целесообразной координатой управления боковым движением самолета является угол крена. Это
Наиболее целесообразной координатой управления боковым движением самолета является угол крена. Это

пропорциональное управление только по сигналу
не обеспечивает демпфирование траекторных колебаний самолета
пропорциональное управление только по сигналу
не обеспечивает демпфирование траекторных колебаний самолета

Первый способ коррекции основывается на ослаблении сигнала, снимаемого с КРМ по
Первый способ коррекции основывается на ослаблении сигнала, снимаемого с КРМ по
Вследствие разброса крутизны сигнала РТС
из-за различной геометрии расположения КРМ относительно
Вследствие разброса крутизны сигнала РТС
из-за различной геометрии расположения КРМ относительно

Наличие высокочастотной составляющей помехи в сигнале
существенно затрудняет процесс пилотирования самолета при
Наличие высокочастотной составляющей помехи в сигнале
существенно затрудняет процесс пилотирования самолета при

Уменьшив действие высокочастотной составляющей помехи с помощью фильтров, мы ввели запаздывание
Уменьшив действие высокочастотной составляющей помехи с помощью фильтров, мы ввели запаздывание

На этапе захода на посадку предъявляются очень жесткие требования к точности
На этапе захода на посадку предъявляются очень жесткие требования к точности
Цифроаналоговые СДУ и САУ
Формирование законов управления элеронов и рулей направления в
Цифроаналоговые СДУ и САУ
Формирование законов управления элеронов и рулей направления в
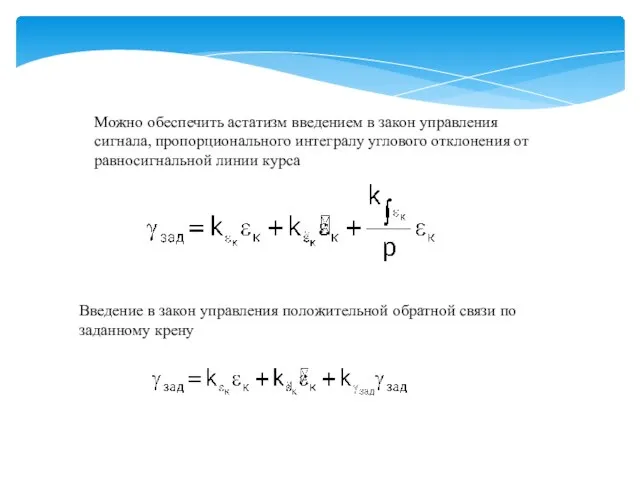
Можно обеспечить астатизм введением в закон управления сигнала, пропорционального интегралу углового
Можно обеспечить астатизм введением в закон управления сигнала, пропорционального интегралу углового
 20120409_krymskaya_voyna1853-1856_gg_034
20120409_krymskaya_voyna1853-1856_gg_034 Разработка технологии производства анизотропной стали
Разработка технологии производства анизотропной стали Архитектурная типология. Категории и понятия
Архитектурная типология. Категории и понятия Родительское собрание Внимание - дети!
Родительское собрание Внимание - дети! Образец задания 3
Образец задания 3 КЛАДОВА ДИАНА - ЛИЦА ПОБЕДЫ
КЛАДОВА ДИАНА - ЛИЦА ПОБЕДЫ Моделирование и конструирование
Моделирование и конструирование Кинокомпания - Ты и Я. Личный фотоальбом
Кинокомпания - Ты и Я. Личный фотоальбом урок 6. Анимация и Mecanim
урок 6. Анимация и Mecanim Чемпионат DВ Drag Racing в России
Чемпионат DВ Drag Racing в России Защищенные микрокомпьютеры с НГА и АРМ на их основе
Защищенные микрокомпьютеры с НГА и АРМ на их основе Обучение Печатный Дом Пенза. Тема 9
Обучение Печатный Дом Пенза. Тема 9 20161127_samoopredelenie_podrostka_cherez_trudovuyu_deyatelnost
20161127_samoopredelenie_podrostka_cherez_trudovuyu_deyatelnost 20160204_pravovye_rebusy
20160204_pravovye_rebusy супер-презентация!
супер-презентация! Освоение нового вида декоративно-прикладного творчества Верховая набойка по ткани
Освоение нового вида декоративно-прикладного творчества Верховая набойка по ткани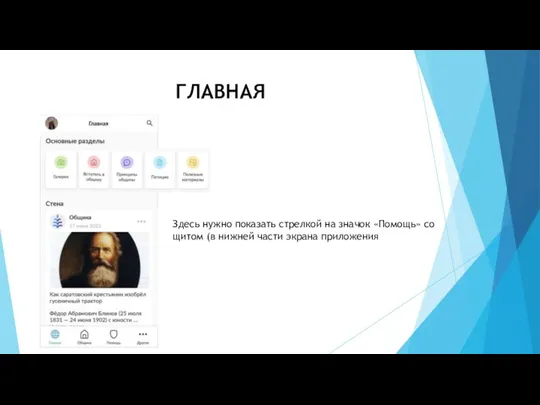 Приложение - слайды для видео
Приложение - слайды для видео Постигая глубины слова. Чтения молитвенной недели
Постигая глубины слова. Чтения молитвенной недели Такие разные мячи
Такие разные мячи Роль семьи в предупреждении и профилактике преступлений и правонарушений среди несовершеннолетних
Роль семьи в предупреждении и профилактике преступлений и правонарушений среди несовершеннолетних Волшебный мир балета
Волшебный мир балета Печенье с предсказаниями. Avon
Печенье с предсказаниями. Avon С днём Хануки
С днём Хануки Организация ЭВМ и вычислительных систем. ЛЕКЦИЯ 1. Вводная часть В1
Организация ЭВМ и вычислительных систем. ЛЕКЦИЯ 1. Вводная часть В1 Тиімді әдіс-тәсілдер - сапалы сабақ кепілі
Тиімді әдіс-тәсілдер - сапалы сабақ кепілі Построение третьего вида по двум данным
Построение третьего вида по двум данным Dwa Anioły
Dwa Anioły юный детектив
юный детектив