- Электрические аппараты (ЭА)

Содержание
- 2. КЛАССИФИКАЦИЯ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ 2
- 3. КЛАССИФИКАЦИЯ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ 3
- 4. ПАРАМЕТРЫ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ 4 Основные параметры ЭА Номинальное напряжение Номинальный ток напряжение, на которое рассчитан электрический
- 5. ПРИМЕРЫ ПАРАМЕТРОВ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ ПО КЛИМАТИЧЕСКОМУ ИСПОЛНЕНИЮ И КАТЕГОРИЯМ РАЗМЕЩЕНИЯ Климатические исполнения электрических аппаратов, предназначенных для
- 6. ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К ЭЛЕКТРИЧЕСКИМ АППАРАТАМ Основные требования к ЭА Термическая стойкость Динамическая стойкость Высокая механическая износостойкость
- 7. ПРИМЕР РАСШИФРОВКИ УСЛОВНОГО ОБОЗНАЧЕНИЯ ЭЛЕКТРИЧЕСКОГО АППАРАТА 7 ВЭ-10-1250-20-У3 выключатель электромагнитный номинальное напряжение 10 кВ номинальный ток
- 8. ТЕПЛОВЫЕ ПРОЦЕССЫ В ЭЛЕКТРИЧЕСКИХ АППАРАТАХ 8 ИСТОЧНИКИ ТЕПЛОТЫ В ЭЛЕКТРИЧЕСКИХ АППАРАТАХ однородный проводник постоянный ток, плотность
- 9. 9 ПОВЕРХНОСТНЫЙ ЭФФЕКТ ПРИ ПЕРЕМЕННОМ ТОКЕ Явление неравномерного распределения плотности переменного тока по поперечному сечению одиночного
- 10. 10 ЭФФЕКТ БЛИЗОСТИ ПРИ ПЕРЕМЕННОМ ТОКЕ Явление неравномерного распределения плотности переменного тока, обусловленное влиянием друг на
- 11. ВЛИЯНИЕ ПОВЕРХНОСТНОГО ЭФФЕКТА И ЭФФЕКТА БЛИЗОСТИ НА ВЫДЕЛЯЕМУЮ МОЩНОСТЬ ПРИ ПЕРЕМЕННОМ ТОКЕ 11
- 12. ДРУГИЕ СПОСОБЫ ОПРЕДЕЛЕНИЯ ПОТЕРЬ ЭНЕРГИИ 12 Эмпирическая формула определения потерь мощности при протекании переменного тока по
- 13. ПОТЕРИ ЭНЕРГИИ В ФЕРРОМАГНИТНЫХ НЕТОКОВЕДУЩИХ ДЕТАЛЯХ 13 Мощность потерь в стали магнитопровода на гистерезис и вихревые
- 14. НАГРЕВ И ОХЛАЖДЕНИЕ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ Тепловые явления в ЭА Полезные (для построения ЭА) Расширение тел при
- 15. ОГРАНИЧЕНИЯ ТЕМПЕРАТУРЫ ЭЛЕМЕНТОВ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ 15 Предельные температуры ЭА Свойства применяемых проводников Свойства применяемых изоляционных материалов
- 16. СПОСОБЫ ТЕПЛООБМЕНА. ТЕПЛОПРОВОДНОСТЬ 16 ТЕПЛООБМЕН – распространение теплоты в электрических аппаратах. ТЕПЛОПРОВОДНОСТЬ – распространение тепловой энергии
- 17. УРАВНЕНИЕ ФУРЬЕ – МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ПРОЦЕССА ТЕПЛОПРОВОДНОСТИ 17 количество теплоты элементарная площадка изотермической поверхности промежуток времени
- 18. СПОСОБЫ ТЕПЛООБМЕНА. ТЕПЛОВОЕ ИЗЛУЧЕНИЕ 18 ТЕПЛОВОЕ ИЗЛУЧЕНИЕ – распространение внутренней энергии тела путем электромагнитных волн. ТЕПЛООБМЕН
- 19. СПОСОБЫ ТЕПЛООБМЕНА. КОНВЕКЦИЯ 19 КОНВЕКЦИЯ – распространение теплоты при перемещении объемов жидкостей или газов в пространстве
- 20. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ КОНВЕКЦИИ 20 Система уравнений при аналитическом описании процесса конвекции в общем виде Уравнение теплопроводности
- 21. Коэффициент теплоотдачи КОЭФФИЦИЕНТ ТЕПЛООТДАЧИ 21 удельный вес теплопроводность вязкость теплоемкость температуропроводность форма расположения тела в среде
- 22. РЕЖИМЫ РАБОТЫ И НАГРЕВА ЭЛЕКТРИЧЕСКИХ АППАРАТОВ 22 Режимы нагрева ЭА Установившиеся режимы за 1 час нагрева
- 23. НАГРЕВ И ОХЛАЖДЕНИЕ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ 23 - превышение температуры в начале процесса - установившееся превышение температуры
- 24. РЕЖИМЫ РАБОТЫ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ 24 Режимы работы ЭА Длительный Кратковременный Повторно-кратковременный Время действия нагрузки (время работы)
- 25. ОСОБЕННОСТИ ПОВТОРНО-КРАТКОВРЕМЕННОГО РЕЖИМА РАБОТЫ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ 25 1. При кратковременном и повторно-кратковременном режимах величина тока может
- 26. ПРОЦЕСС НАГРЕВА ЭЛЕКТРИЧЕСКОГО АППАРАТА ПРИ КОРОТКОМ ЗАМЫКАНИИ 26 Время действия токов короткого замыкания значительно меньше постоянной
- 27. ТЕРМИЧЕСКАЯ СТОЙКОСТЬ ЭЛЕКТРИЧЕСКОГО АППАРАТА 27 Это способность выдерживать кратковременное тепловое действие токов короткого замыкания без повреждений.
- 28. ЭЛЕКТРОДИНАМИЧЕСКИЕ СИЛЫ 28 Электродинамические силы (электродинамические усилия - ЭДУ) - это механические силы, возникающие в контуре
- 29. МЕТОДЫ РАСЧЕТА ЭЛЕКТРОДИНАМИЧЕСКИХ СИЛ 29 Расчет ЭДУ базируется на уравнении Ампера (по закону Ампера) Метод удобен,
- 30. УРАВНЕНИЕ ЭНЕРГЕТИЧЕСКОГО МЕТОДА ПРИ ОПРЕДЕЛЕНИИ ЭЛЕКТРОДИНАМИЧЕСКИХ СИЛ 30 Для системы двух взаимосвязанных контуров электромагнитная энергия определяется
- 31. ЭЛЕКТРОДИНАМИЧЕСКИЕ СИЛЫ МЕЖДУ ПАРАЛЛЕЛЬНЫМИ ПРОВОДНИКАМИ 31 Параллельные проводники одинаковой длины магнитная проницаемость воздуха геометрический фактор (коэффициент
- 32. ЭЛЕКТРОДИНАМИЧЕСКИЕ СИЛЫ МЕЖДУ ПАРАЛЛЕЛЬНЫМИ ПРОВОДНИКАМИ 32 Параллельные проводники разной длины магнитная проницаемость воздуха геометрический фактор (коэффициент
- 33. ФАКТОРЫ, ВЛИЯЮЩИЕ НА ЭЛЕКТРОДИНАМИЧЕСКУЮ СИЛУ 33 взаимное расположение проводников с токами форма проводников с токами размеры
- 34. При индуктивность витка ЭЛЕКТРОДИНАМИЧЕСКАЯ СИЛА КРУГОВОГО ВИТКА С ТОКОМ 34 ЭДУ, приложенная к окружности стремится увеличить
- 35. ЭЛЕКТРОДИНАМИЧЕСКАЯ СИЛА МЕЖДУ ВИТКАМИ КАТУШКИ 35 При ваимоиндуктивность Вертикальная составляющая электродинамической силы Fh витка: если потоки,
- 36. ЭЛЕКТРОДИНАМИЧЕСКАЯ СИЛА КАТУШКИ 36 увеличение среднего диаметра сжатие по высоте Для катушки, имеющей w витков, электродинамическая
- 37. ЭЛЕКТРОДИНАМИЧЕСКАЯ СИЛА НА ПЕРЕМЕННОМ ТОКЕ 37 Для однофазного переменного тока i(t) = Im sinωt Расчет электродинамических
- 38. ЭЛЕКТРОДИНАМИЧЕСКАЯ СТОЙКОСТЬ 38 - это способность противостоять без повреждений и нарушений функционального состояния механическим силам, возникающим
- 39. МАГНИТНЫЕ ЦЕПИ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ 39 Магнитная цепь - совокупность тел и сред, создающая ориентированный магнитный поток
- 40. МЕТОДЫ РАСЧЕТА МАГНИТНЫХ ЦЕПЕЙ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ 40 Графоаналитические методы Аналитические методы Трудности учет нелинейной магнитной характеристики
- 41. ЗАКОНЫ, ПРИМЕНЯЕМЫЕ ПРИ РАСЧЕТЕ МАГНИТНЫХ ЦЕПЕЙ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ Первый закон Кирхгофа для магнитных цепей – алгебраическая
- 42. ЗАКОНЫ, ПРИМЕНЯЕМЫЕ ПРИ РАСЧЕТЕ МАГНИТНЫХ ЦЕПЕЙ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ 42 аналогия магнитное сопротивление единицы длины магнитной цепи
- 43. ОСОБЕННОСТИ РАСЧЕТА МАГНИТНЫХ ЦЕПЕЙ ПРИ ПЕРЕМЕННОМ НАПРЯЖЕНИИ 43 Переменный ток Переменное напряжение Индуктивное сопротивление обмотки, меняющееся
- 44. МАТЕРИАЛЫ МАГНИТНЫХ ЦЕПЕЙ 44 Магнитные материалы высокая магнитная проницаемость (малые габариты) высокая индукция насыщения (большое тяговое
- 45. ЭЛЕКТРОМАГНИТЫ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ 45 Электромагнитные устройства служат для создания магнитного поля с помощью обмотки, обтекаемой электрическим
- 46. КЛАССИФИКАЦИЯ ЭЛЕКТРОМАГНИТОВ 46 ЭЛЕКТРО-МАГНИТЫ По способу действия По способу включения По роду тока По времени действия
- 47. УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯ ЭЛЕКТРОМАГНИТА 47 1 – якорь – подвижная часть магнитной цепи; 2 –
- 48. РАЗНОВИДНОСТИ ЭЛЕКТРОМАГНИТНЫХ СИСТЕМ 48 клапанная (а); броневая (б); Ш-образная (в); соленоидная (г); с поворотным якорем (д);
- 49. ЭЛЕКТРОМАГНИТНАЯ СИЛА 49 величина электрической энергии, поступающей в систему за время dt Расчет электромагнитной силы, развиваемой
- 50. АЛГОРИТМ РАСЧЕТА ЭЛЕКТРОМАГНИТНОЙ СИЛЫ 50 электромагнитная сила электромагнита меньше силы возвратной пружины, якорь неподвижен и потокосцепление
- 51. Энергия магнитного поля, запасенная в цепи АЛГОРИТМ РАСЧЕТА ЭЛЕКТРОМАГНИТНОЙ СИЛЫ 51 масштаб по току масштаб по
- 52. АЛГОРИТМ РАСЧЕТА ЭЛЕКТРОМАГНИТНОЙ СИЛЫ Средняя электромагнитная сила при перемещении якоря от δ1 до δ2 52 статическая
- 53. РАСЧЕТ ЭЛЕКТРОМАГНИТНОЙ СИЛЫ ЭЛЕКТРОМАГНИТА ПЕРЕМЕННОГО ТОКА 53 Амплитудное значение силы для однофазных систем без экранирующего витка
- 54. ДИНАМИКА ЭЛЕКТРОМАГНИТА 54 РЕЖИМЫ РАБОТЫ ЭЛЕКТРОМАГНИТА Статический режим Динамический режим Работа тормозных и удерживающих электромагнитов Процесс
- 55. ДИНАМИКА ВКЛЮЧЕНИЯ ЭЛЕКТРОМАГНИТА 55 Время срабатывания электромагнита – это время с момента подачи сигнала срабатывания на
- 56. ДИНАМИКА ВКЛЮЧЕНИЯ ЭЛЕКТРОМАГНИТА 56 установившееся значение тока постоянная времени цепи ток обмотки, при котором начинается движение
- 57. ДИНАМИКА ВКЛЮЧЕНИЯ ЭЛЕКТРОМАГНИТА 57 Ток растет, якорь трогается При движении якоря → dL/dt>0 → рост i
- 58. ДИНАМИКА ОТКЛЮЧЕНИЯ ЭЛЕКТРОМАГНИТА 58 Время срабатывания при отключении – промежуток времени с момента отключения обмотки (или
- 59. ДИНАМИКА ОТКЛЮЧЕНИЯ ЭЛЕКТРОМАГНИТА Процесс спада тока и магнитного потока протекает очень быстро. Если сердечник сплошной и
- 60. УСКОРЕНИЕ И ЗАМЕДЛЕНИЕ СРАБАТЫВАНИЯ ЭЛЕКТРОМАГНИТА 60 ИЗМЕНЕНИЕ СКОРОСТИ СРАБАТЫВАНИЯ ЭА Уменьшение времени срабатывания ЭА Изменение конструкции
- 61. УСКОРЕНИЕ И ЗАМЕДЛЕНИЕ СРАБАТЫВАНИЯ ЭЛЕКТРОМАГНИТА. ПРИМЕНЕНИЕ СПЕЦИАЛЬНЫХ СХЕМ Схемы ускорения срабатывания электромагнита при включении Схемы замедления
- 62. КОНТАКТЫ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ 62 Электрический контакт предназначен для соединения элементов электрической цепи. Электрический контакт – место
- 63. КОНТАКТЫ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ ПО КОНСТРУКТИВНОМУ ИСПОЛНЕНИЮ соединительные (неразмыкаемые) неподвижные подвижные неразъемные (сварные) разъемные (болтовы) скользящие щеточные
- 64. СОПРОТИВЛЕНИЕ КОНТАКТА 64 Сопротивление контакта (переходное сопротивление) Сопротивления стягивания обусловлено стягиванием линий тока к местам истинного
- 65. РАСЧЕТ СОПРОТИВЛЕНИЯ СТЯГИВАНИЯ КОНТАКТА Для расчета сопротивления стягивания разработаны различные упрощающие модели контактирования. Простейшая модель Хольма:
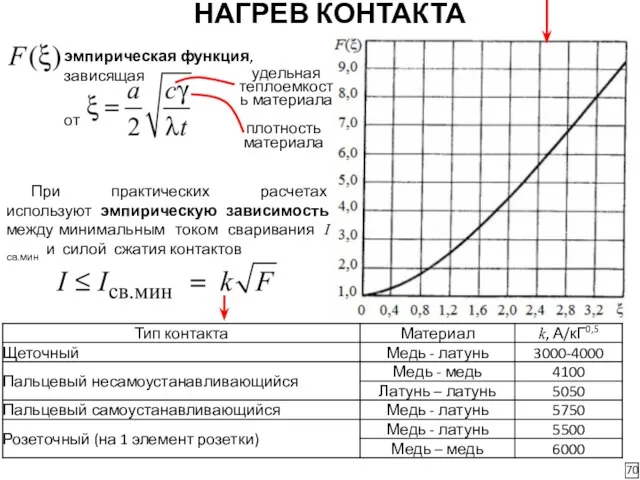
- 66. ПРАКТИЧЕСКИЙ РАСЧЕТ СОПРОТИВЛЕНИЯ КОНТАКТА 66 Для практических расчетов сопротивления контакта часто используют эмпирическую формулу сила сжатия
- 67. НАГРЕВ КОНТАКТА 67 Распространение теплоты в контактном соединении Кривая распределения превышения температуры вдоль проводника с контактом
- 68. НАГРЕВ КОНТАКТА Превышение температуры тела контакта (превышение температуры границы области стягивания x=0) Если расстояние между двумя
- 69. НАГРЕВ КОНТАКТА 69 Для слаботочных контактов принимают, что допустимое падение напряжения не должно превосходить напряжения размягчения
- 70. НАГРЕВ КОНТАКТА 70 эмпирическая функция, зависящая от удельная теплоемкость материала плотность материала При практических расчетах используют
- 71. РЕЖИМЫ РАБОТЫ КОНТАКТОВ 71 Условия работы контактов определяются их возможными состояниями (контакты замкнуты или разомкнуты). Замкнутое
- 72. РЕЖИМЫ РАБОТЫ КОНТАКТОВ ДИНАМИЧЕСКИЕ РЕЖИМЫ Работоспособность коммутирующих контактов характеризуется также процессами замыкания (включения) и размыкания (отключения)
- 73. МАТЕРИАЛЫ КОНТАКТОВ Mатериалы контактов должны иметь характеристики: высокие электрическую проводимость и теплопроводность, стойкость против образования пленок
- 74. ЭЛЕКТРИЧЕСКАЯ ДУГА И ДУГОГАШЕНИЕ 74 Электрическая дуга является одним из видов газового разряда (явление прохождения тока
- 75. ФИЗИЧЕСКИЕ ПРОЦЕССЫ В ЭЛЕКТРИЧЕСКОЙ ДУГЕ область столба дуги околокатодная область околоанодная область Для дуговых процессов в
- 76. ФИЗИЧЕСКИЕ ПРОЦЕССЫ В ЭЛЕКТРИЧЕСКОЙ ДУГЕ Катодная область имеет основное значение в процессе формирования дуги. Средняя напряженность
- 77. ФИЗИЧЕСКИЕ ПРОЦЕССЫ В ЭЛЕКТРИЧЕСКОЙ ДУГЕ 77 В столбе дуги протекают также процессы деионизации (образование нейтральных частиц,
- 78. ВОЛЬТ-АМПЕРНЫЕ ХАРАКТЕРИСТИКИ ДУГИ Вольт-амперные характеристики (ВАХ) дуги устанавливают связь между значением тока и падением напряжения между
- 79. ВОЛЬТ-АМПЕРНЫЕ ХАРАКТЕРИСТИКИ ДУГИ 79 В реальных установках ток может изменяться довольно быстро. Вследствие тепловой инерции столба
- 80. УСЛОВИЯ ГАШЕНИЯ ДУГИ Общее условие гашения электрической дуги может быть сформулировано следующим образом: электрическая дуга между
- 81. УСЛОВИЯ ГАШЕНИЯ ДУГИ 81 На ВАХ дуги
- 82. УСЛОВИЯ ГАШЕНИЯ ДУГИ 82
- 83. ВАХ УСЛОВИЯ ГАШЕНИЯ ДУГИ 83
- 84. УСЛОВИЯ ГАШЕНИЯ ДУГИ 84
- 85. УСЛОВИЯ ГАШЕНИЯ ДУГИ 85
- 86. УСЛОВИЯ ГАШЕНИЯ ДУГИ 86
- 87. УСЛОВИЯ ГАШЕНИЯ ДУГИ 87
- 88. 88 УСЛОВИЯ ГАШЕНИЯ ДУГИ
- 89. 89 СПОСОБЫ ГАШЕНИЯ ДУГИ. ДУГОГАСИТЕЛЬНЫЕ УСТРОЙСТВА
- 90. СПОСОБЫ ГАШЕНИЯ ДУГИ. ДУГОГАСИТЕЛЬНЫЕ УСТРОЙСТВА НИЗКОГО НАПРЯЖЕНИЯ Простейший способ гашения дуги – механическое растяжение столба дуги.
- 91. СПОСОБЫ ГАШЕНИЯ ДУГИ. ДУГОГАСИТЕЛЬНЫЕ УСТРОЙСТВА ВЫСОКОГО НАПРЯЖЕНИЯ При гашении дуги в трансформаторном масле (рис. а) дуга
- 92. ЭЛЕКТРИЧЕСКИЕ АППАРАТЫ НИЗКОГО НАПРЯЖЕНИЯ 92 Контакторы и пускатели – это оперативные аппараты, коммутирующие электрические цепи нагрузки
- 93. 93 ОБЩИЕ СВЕДЕНИЯ О КОНТАКТОРАХ. Основные технические данные контакторов Номинальный ток главных контактов Iн составляет 3–4000
- 94. Требования, предъявляемые к контакторам, и условия их работы определены стандартами ОБЩИЕ СВЕДЕНИЯ О КОНТАКТОРАХ. Контакторы должны
- 95. Условия отключения цепи контакторами во многом определяются отношением индуктивности L нагрузки к ее активному сопротивлению R;
- 96. УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯ КОНТАКТОРА 96 Контактор имеет следующие основные узлы: контактную систему, дугогасительное устройство, привод,
- 97. Обмотка этой системы 17 включена последовательно в цепь главного тока и размещена на стальном сердечнике 1.
- 98. После соприкосновения контактов происходит перекатывание подвижного контакта 7 по неподвижному 2. Контактная пружина создает определенное нажатие
- 99. Число контактов у контакторов переменного тока может быть от 1 до 5. Наибольшее распространение получили трехполюсные
- 100. МАГНИТНЫЕ ПУСКАТЕЛИ 100 Магнитный пускатель – электрический аппарат, предназначенный для пуска, реверса и отключения электродвигателей. Магнитный
- 101. Такой пускатель, помимо защиты и пуска двигателя, позволяет осуществить его реверс с помощью изменения последовательности чередования
- 102. РЕЛЕ. ОБЩИЕ СВЕДЕНИЯ 102 Реле – электрический аппарат, в котором при плавном изменении управляющего (входного) сигнала
- 103. РЕЛЕ. КЛАССИФИКАЦИЯ Реле По области применения (с их помощью можно осуществлять пуск, реверсирование, торможение двигателей) реле
- 104. Реле По принципу воздействия на управляемую цепь контактные реле (воздействуют на управляемую цепь путем размыкания и
- 105. РЕЛЕ. ОСНОВНЫЕ ПАРАМЕТРЫ И ХАРАКТЕРИСТИКИ Основная характеристика реле – характеристика управления (характеристика «вход»–«выход»), представляющая зависимость выходного
- 106. РЕЛЕ. ОСНОВНЫЕ ПАРАМЕТРЫ И ХАРАКТЕРИСТИКИ 106 Время срабатывания – время с момента подачи сигнала на срабатывание
- 107. РЕЛЕ. ПРЕДЪЯВЛЯЕМЫЕ ТРЕБОВАНИЯ 107 Требования, предъявляемые к реле, определяются их назначением. К реле защиты энергосистем предъявляются
- 108. ТИПЫ РЕЛЕ. ЭЛЕКТРОМАГНИТНЫЕ РЕЛЕ 108 Электромагнитные реле благодаря простоте конструкции и надежности в работе широко применяются
- 109. ТИПЫ РЕЛЕ. ЭЛЕКТРОМАГНИТНЫЕ РЕЛЕ 109 Для контроля уменьшения входного сигнала используют минимальные реле (напряжения или тока),
- 110. ТИПЫ РЕЛЕ. ЭЛЕКТРОМАГНИТНЫЕ РЕЛЕ 110 Для реле защиты энергосистем и электроприводов, контролирующих значение тока в узких
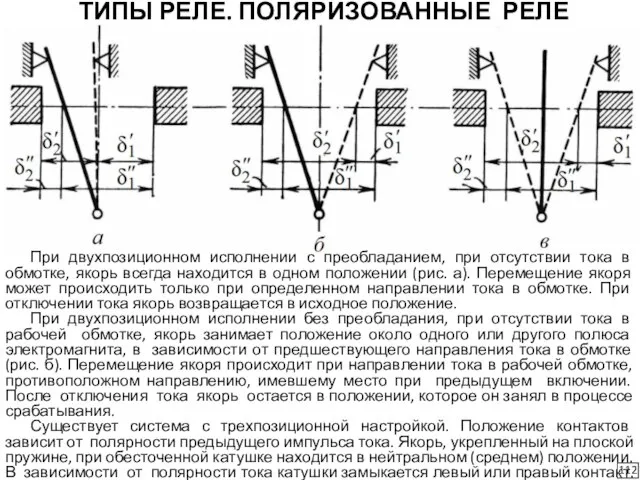
- 111. ТИПЫ РЕЛЕ. ПОЛЯРИЗОВАННЫЕ РЕЛЕ 111 Последовательная магнитная цепь применяется редко из-за недостатков: 1) требуется повышенное значение
- 112. 112 При двухпозиционном исполнении с преобладанием, при отсутствии тока в обмотке, якорь всегда находится в одном
- 113. ТИПЫ РЕЛЕ. РЕЛЕ ВРЕМЕНИ Реле времени служат для создания выдержки времени между срабатываниями нескольких аппаратов в
- 114. В реле времени с электромагнитным замедлением использован принцип электромагнитного замедления. В качестве короткозамкнутой обмотки используется алюминиевая
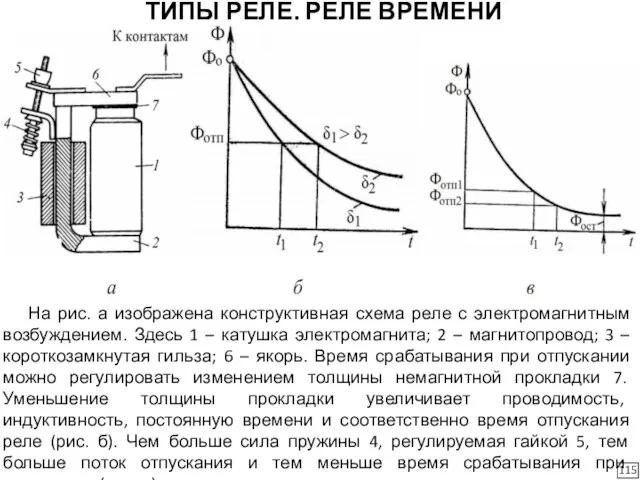
- 115. 115 ТИПЫ РЕЛЕ. РЕЛЕ ВРЕМЕНИ На рис. а изображена конструктивная схема реле с электромагнитным возбуждением. Здесь
- 116. У реальных магнитных материалов после отключения намагничивающей обмотки поток спадает до остаточного потока, который определяется свойствами
- 117. 117 ТИПЫ РЕЛЕ. РЕЛЕ ВРЕМЕНИ В реле с пневматическим замедлением и анкерным механизмом электромагнит постоянного или
- 118. ТИПЫ РЕЛЕ. ГЕРКОНОВЫЕ РЕЛЕ Герконовые реле – это реле с герметичными магнитоуправляемыми контактами. Контакты герконовых реле
- 119. ТИПЫ РЕЛЕ. ГЕРКОНОВЫЕ РЕЛЕ Герконы имеют преимущества: благодаря полной герметизации могут работать в неблагоприятных условиях окружающей
- 120. ТИПЫ РЕЛЕ. ТЕПЛОВЫЕ РЕЛЕ 120 Тепловые реле предназначены для защиты электроустановок, главным образом электрических машин, от
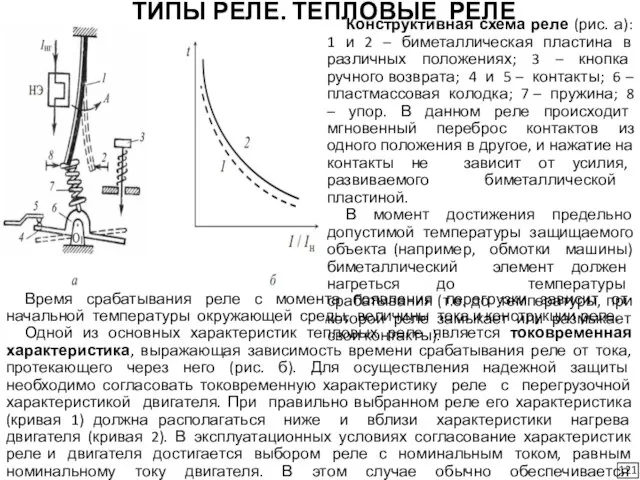
- 121. ТИПЫ РЕЛЕ. ТЕПЛОВЫЕ РЕЛЕ 121 Конструктивная схема реле (рис. а): 1 и 2 – биметаллическая пластина
- 122. ТИПЫ РЕЛЕ. ТЕПЛОВЫЕ РЕЛЕ 122 Существенным недостатком тепловых реле является зависимость времени действия от температуры окружающей
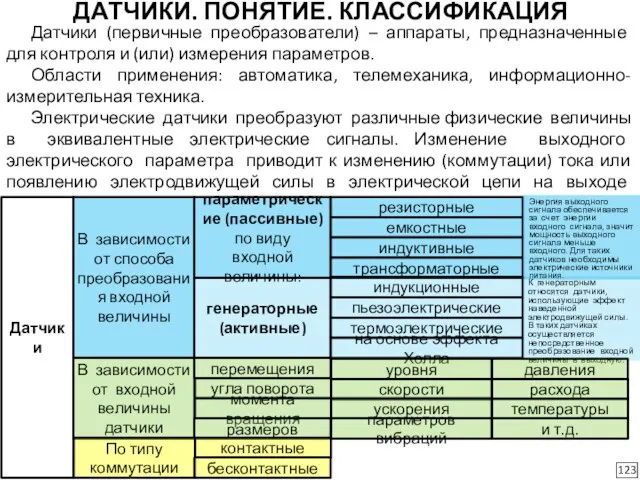
- 123. ДАТЧИКИ. ПОНЯТИЕ. КЛАССИФИКАЦИЯ 123 Датчики (первичные преобразователи) – аппараты, предназначенные для контроля и (или) измерения параметров.
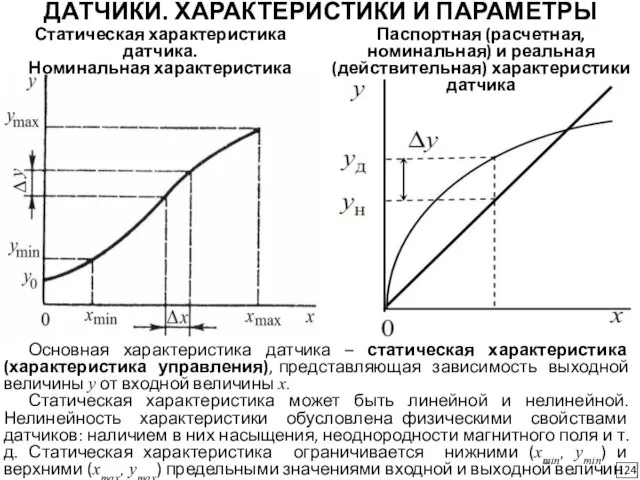
- 124. ДАТЧИКИ. ХАРАКТЕРИСТИКИ И ПАРАМЕТРЫ Статическая характеристика датчика. Номинальная характеристика Паспортная (расчетная, номинальная) и реальная (действительная) характеристики
- 125. Чувствительность датчика представляет отношение приращений выходной и входной величин. Для нелинейной статической характеристики чувствительность является функцией
- 126. ДАТЧИКИ. ПРЕДЪЯВЛЯЕМЫЕ ТРЕБОВАНИЯ 126 Высокая чувствительность. Малая погрешность. Необходимый диапазоном изменения входной величины. Возможность согласования со
- 127. ДАТЧИКИ. РЕЗИСТОРНЫЕ ДАТЧИКИ 127 Резисторные датчики предназначены для измерения перемещения и сил. Принцип действия резисторных датчиков
- 128. ДАТЧИКИ. ПОТЕНЦИОМЕТРИЧЕСКИЕ ДАТЧИКИ 128 Потенциометрические датчики предназначены для измерения угловых или линейных перемещений. С их помощью
- 129. ДАТЧИКИ. ПОТЕНЦИОМЕТРИЧЕСКИЕ ДАТЧИКИ 129 Для обмоточного провода используются сплавы с высоким удельным сопротивлением (манганин, константан, нихром).
- 130. ДАТЧИКИ. СХЕМЫ ВКЛЮЧЕНИЯ ПОТЕНЦИОМЕТРИЧЕСКИХ ДАТЧИКОВ Наиболее простой является реостатная схема (рис. а) включения датчика. Применяется также
- 131. ДАТЧИКИ. ТЕНЗОРЕЗИСТОРНЫЕ ДАТЧИКИ 131 Тензорезисторные датчики предназначены для измерения деформаций, возникающих под действием внешних сил. В
- 132. ДАТЧИКИ. ТЕНЗОРЕЗИСТОРНЫЕ ДАТЧИКИ 132 Относительное изменение сопротивления проводника Тензоэффект различных материалов характеризуется коэффициентом тензочувствительности Характеристика управления
- 133. ДАТЧИКИ. ТЕНЗОРЕЗИСТОРНЫЕ ДАТЧИКИ Проводниковые тензорезисторные датчики могут быть проволочными и фольговыми. Вторые имеют большую площадь охлаждения
- 134. детали силой F вызовет разбаланс в схеме моста. Измерительный элемент ИЭ в диагонали схемы зафиксирует соответствующий
- 135. ДАТЧИКИ. ТЕРМОРЕЗИСТОРНЫЕ ДАТЧИКИ Терморезисторные датчики предназначены для измерения температуры деталей машин, приборов, механизмов. Принцип действия таких
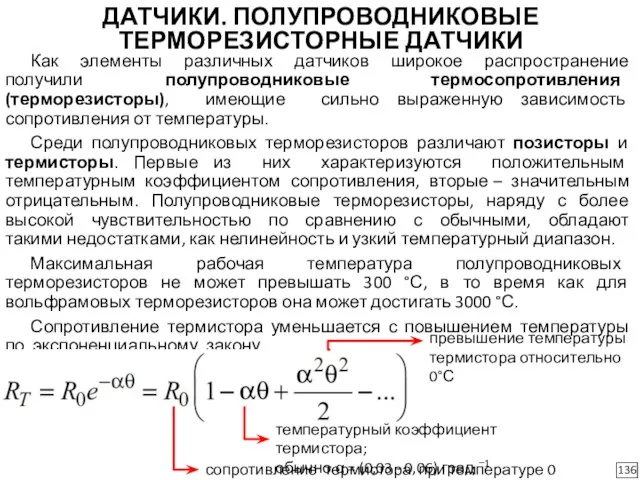
- 136. ДАТЧИКИ. ПОЛУПРОВОДНИКОВЫЕ ТЕРМОРЕЗИСТОРНЫЕ ДАТЧИКИ 136 Как элементы различных датчиков широкое распространение получили полупроводниковые термосопротивления (терморезисторы), имеющие
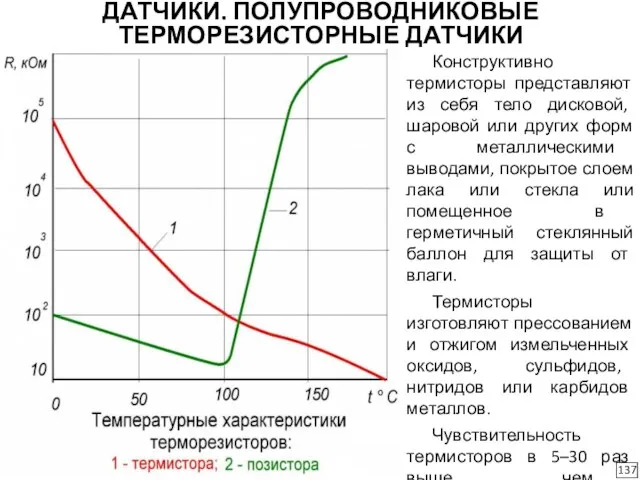
- 137. ДАТЧИКИ. ПОЛУПРОВОДНИКОВЫЕ ТЕРМОРЕЗИСТОРНЫЕ ДАТЧИКИ 137 Конструктивно термисторы представляют из себя тело дисковой, шаровой или других форм
- 138. Термисторы находят применение для ограничения пусковых токов электродвигателей в качестве датчиков-ограничителей тока. Способность термисторов существенно изменять
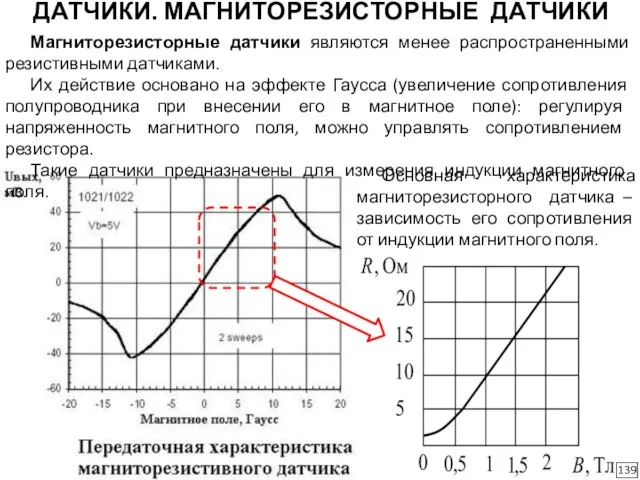
- 139. ДАТЧИКИ. МАГНИТОРЕЗИСТОРНЫЕ ДАТЧИКИ 139 Магниторезисторные датчики являются менее распространенными резистивными датчиками. Их действие основано на эффекте
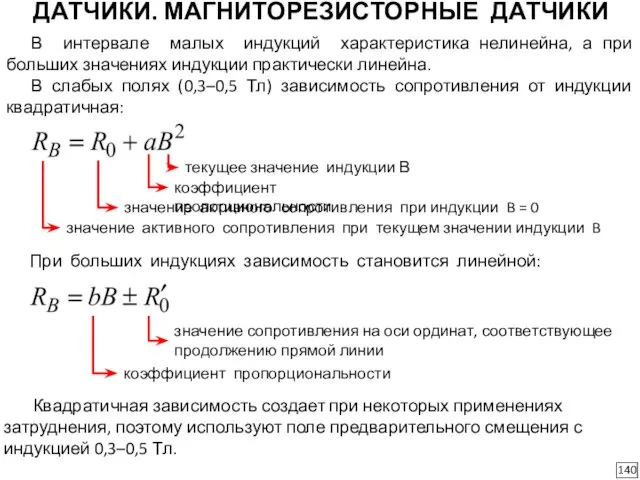
- 140. ДАТЧИКИ. МАГНИТОРЕЗИСТОРНЫЕ ДАТЧИКИ 140 В интервале малых индукций характеристика нелинейна, а при больших значениях индукции практически
- 141. ДАТЧИКИ. ЕМКОСТНЫЕ ДАТЧИКИ 141 Емкостные датчики служат для измерения перемещений, размеров деталей, уровня жидкости, механических напряжений,
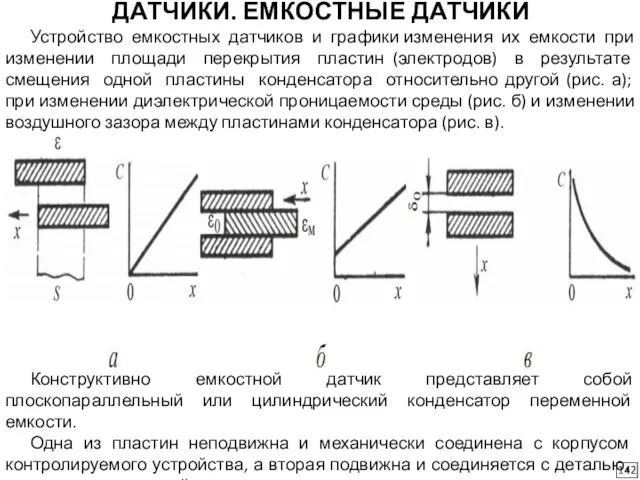
- 142. ДАТЧИКИ. ЕМКОСТНЫЕ ДАТЧИКИ 142 Устройство емкостных датчиков и графики изменения их емкости при изменении площади перекрытия
- 143. ДАТЧИКИ. ЕМКОСТНЫЕ ДАТЧИКИ 143 Датчики с изменением величины воздушного зазора и площади перекрытия используются обычно для
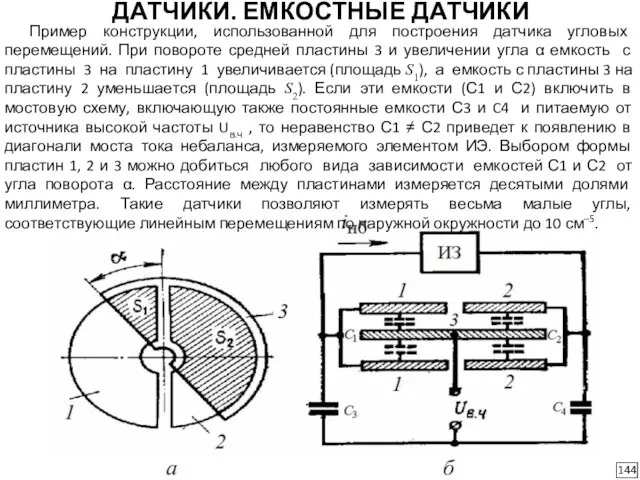
- 144. ДАТЧИКИ. ЕМКОСТНЫЕ ДАТЧИКИ 144 Пример конструкции, использованной для построения датчика угловых перемещений. При повороте средней пластины
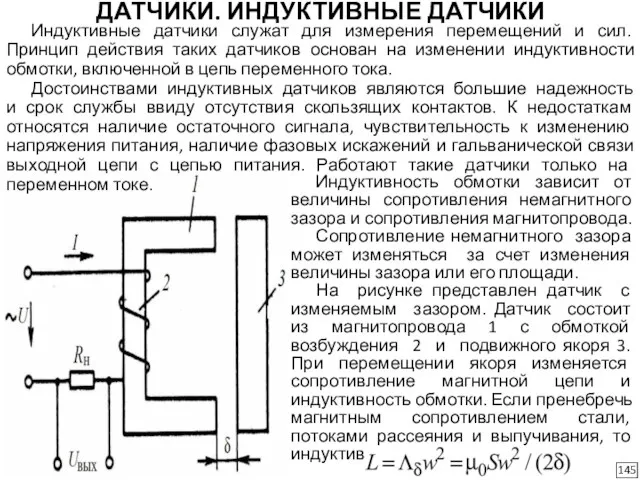
- 145. ДАТЧИКИ. ИНДУКТИВНЫЕ ДАТЧИКИ Индуктивные датчики служат для измерения перемещений и сил. Принцип действия таких датчиков основан
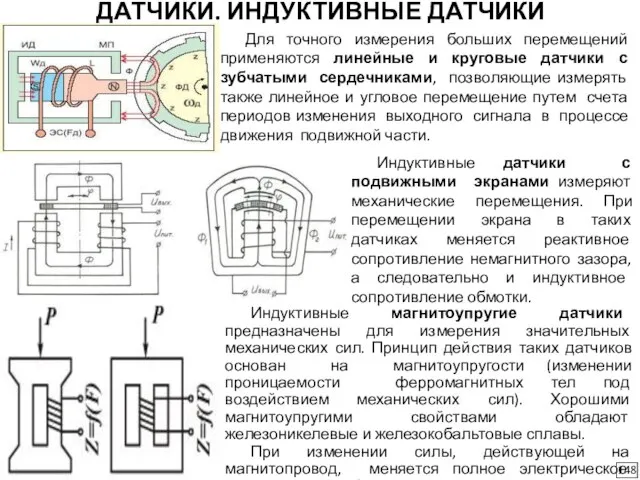
- 146. ДАТЧИКИ. ИНДУКТИВНЫЕ ДАТЧИКИ 146 Выходное напряжение датчика (индуктивное сопротивление обмотки много больше активного) Зависимость выходного напряжения
- 147. ДАТЧИКИ. ИНДУКТИВНЫЕ ДАТЧИКИ 147 Более широкое применение получили реверсивные датчики, имеющие лучшие характеристики. Дифференциальный реверсивный датчик
- 148. ДАТЧИКИ. ИНДУКТИВНЫЕ ДАТЧИКИ 148 Индуктивные магнитоупругие датчики предназначены для измерения значительных механических сил. Принцип действия таких
- 149. ДАТЧИКИ. ТРАНСФОРМАТОРНЫЕ ДАТЧИКИ 149 Трансформаторные датчики применяются для измерения механических перемещений и сил. Они представляют собой
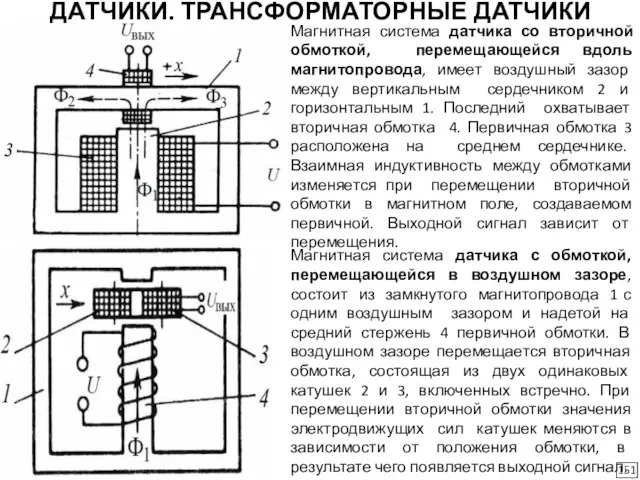
- 150. ДАТЧИКИ. ТРАНСФОРМАТОРНЫЕ ДАТЧИКИ 150 Трансформаторные датчики с перемещающимся якорем не имеют подвижной обмотки. При смещении якоря
- 151. ДАТЧИКИ. ТРАНСФОРМАТОРНЫЕ ДАТЧИКИ 151 Магнитная система датчика со вторичной обмоткой, перемещающейся вдоль магнитопровода, имеет воздушный зазор
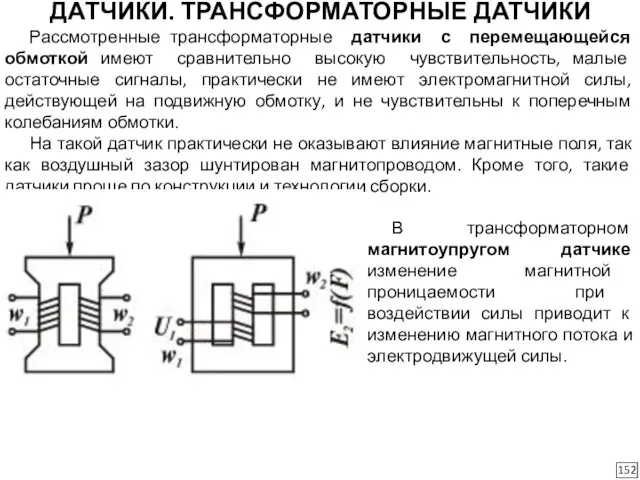
- 152. ДАТЧИКИ. ТРАНСФОРМАТОРНЫЕ ДАТЧИКИ 152 Рассмотренные трансформаторные датчики с перемещающейся обмоткой имеют сравнительно высокую чувствительность, малые остаточные
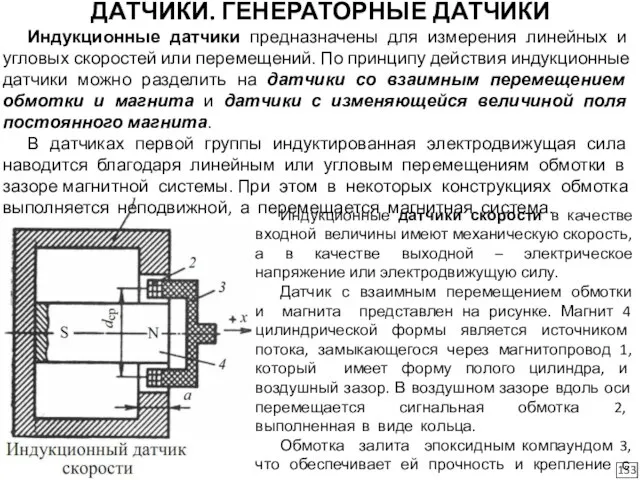
- 153. ДАТЧИКИ. ГЕНЕРАТОРНЫЕ ДАТЧИКИ 153 Индукционные датчики предназначены для измерения линейных и угловых скоростей или перемещений. По
- 154. В датчиках второй группы индуктированная электродвижущая сила наводится в результате изменения магнитного сопротивления цепи при перемещениях
- 155. ДАТЧИКИ. ГЕНЕРАТОРНЫЕ ДАТЧИКИ Различают прямой и обратный пьезоэффекты. Прямой пьезоэффект заключается в возникновении электрических зарядов на
- 156. Пьезоэлектрические датчики непригодны для контроля постоянных или медленно изменяющихся усилий, так как заряд, возникающий на гранях
- 157. ДАТЧИКИ. ТЕРМОЭЛЕКТРИЧЕСКИЕ ДАТЧИКИ Термоэлектрические датчики применяются для измерения температур. Специальные термоэлектрические датчики используются для измерения тепловой
- 158. ДАТЧИКИ. ТЕРМОЭЛЕКТРИЧЕСКИЕ ДАТЧИКИ 158 Характеристика термопары Материалы для термоэлектродов должны отвечать следующим требованиям: иметь линейную зависимость
- 159. ДАТЧИКИ. ДАТЧИКИ ХОЛЛА Датчики Холла используются для измерения магнитных, электрических и неэлектрических величин. Принцип действия таких
- 161. Скачать презентацию
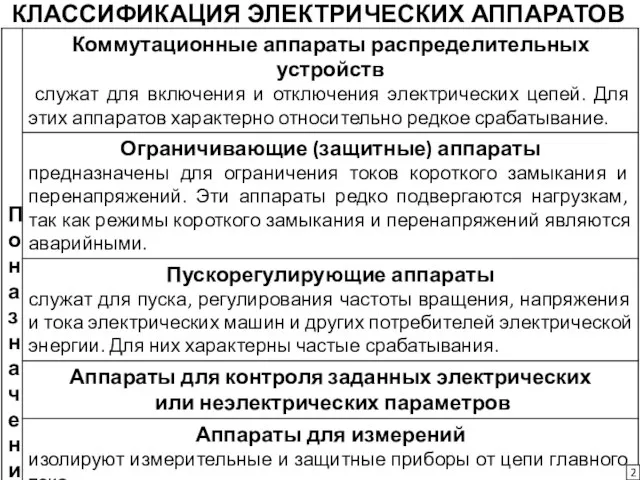
КЛАССИФИКАЦИЯ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
2
КЛАССИФИКАЦИЯ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
2
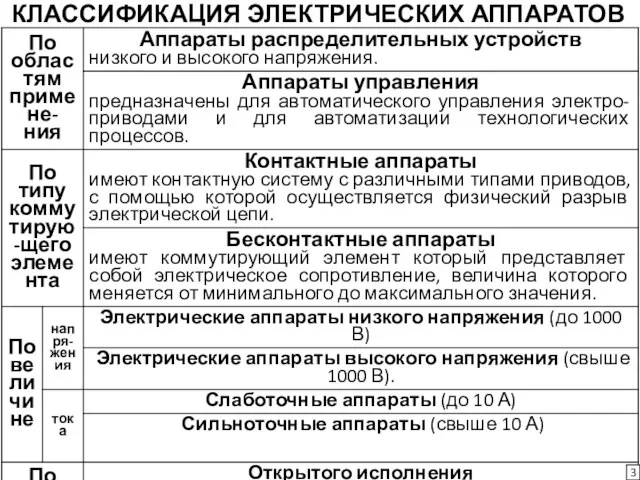
КЛАССИФИКАЦИЯ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
3
КЛАССИФИКАЦИЯ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
3
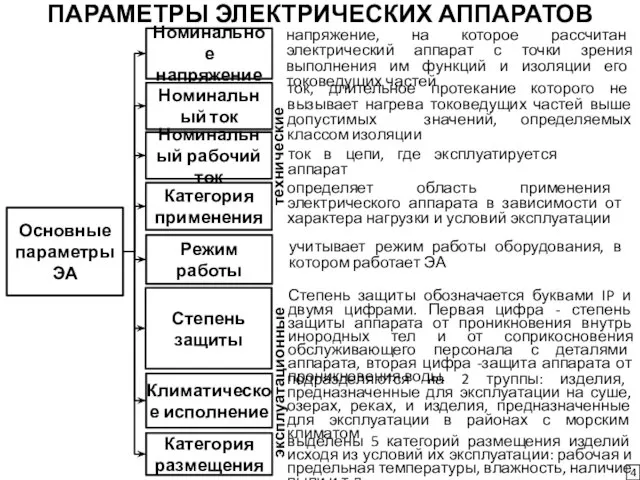
ПАРАМЕТРЫ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
4
Основные параметры
ЭА
Номинальное напряжение
Номинальный ток
напряжение, на которое рассчитан электрический аппарат
ПАРАМЕТРЫ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
4
Основные параметры
ЭА
Номинальное напряжение
Номинальный ток
напряжение, на которое рассчитан электрический аппарат
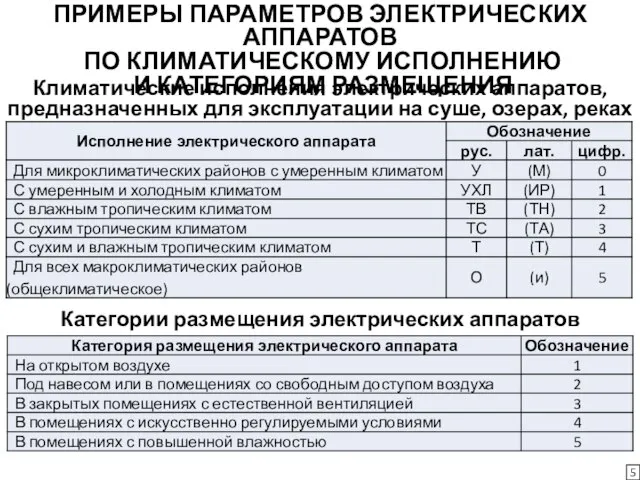
ПРИМЕРЫ ПАРАМЕТРОВ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
ПО КЛИМАТИЧЕСКОМУ ИСПОЛНЕНИЮ
И КАТЕГОРИЯМ РАЗМЕЩЕНИЯ
Климатические исполнения
ПРИМЕРЫ ПАРАМЕТРОВ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
ПО КЛИМАТИЧЕСКОМУ ИСПОЛНЕНИЮ
И КАТЕГОРИЯМ РАЗМЕЩЕНИЯ
Климатические исполнения
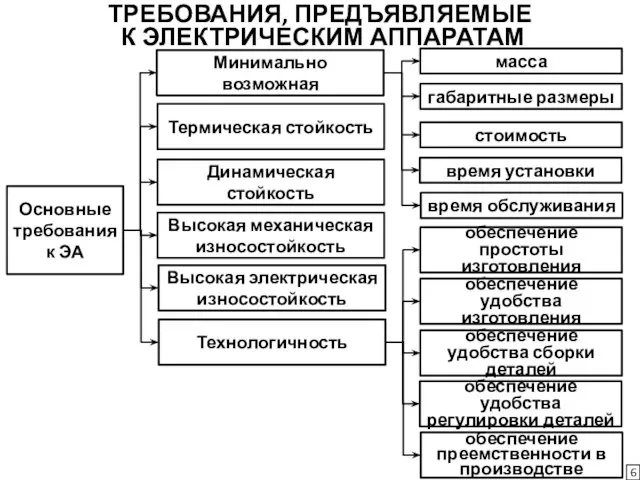
ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ
К ЭЛЕКТРИЧЕСКИМ АППАРАТАМ
Основные требования
к ЭА
Термическая стойкость
Динамическая стойкость
Высокая механическая износостойкость
Высокая
ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ
К ЭЛЕКТРИЧЕСКИМ АППАРАТАМ
Основные требования
к ЭА
Термическая стойкость
Динамическая стойкость
Высокая механическая износостойкость
Высокая
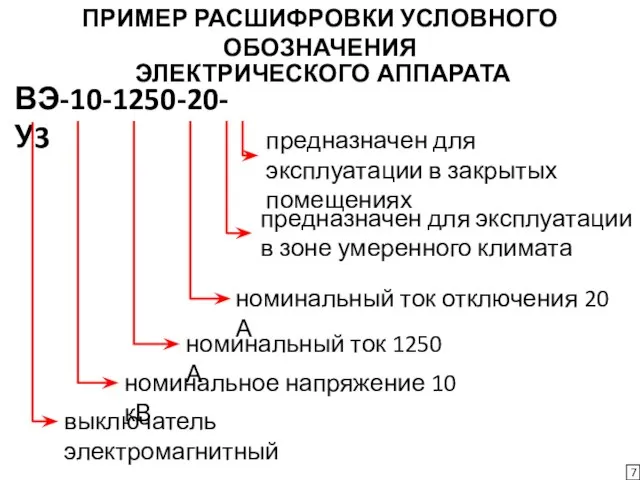
ПРИМЕР РАСШИФРОВКИ УСЛОВНОГО ОБОЗНАЧЕНИЯ
ЭЛЕКТРИЧЕСКОГО АППАРАТА
7
ВЭ-10-1250-20-У3
выключатель электромагнитный
номинальное напряжение 10 кВ
номинальный ток
ПРИМЕР РАСШИФРОВКИ УСЛОВНОГО ОБОЗНАЧЕНИЯ
ЭЛЕКТРИЧЕСКОГО АППАРАТА
7
ВЭ-10-1250-20-У3
выключатель электромагнитный
номинальное напряжение 10 кВ
номинальный ток
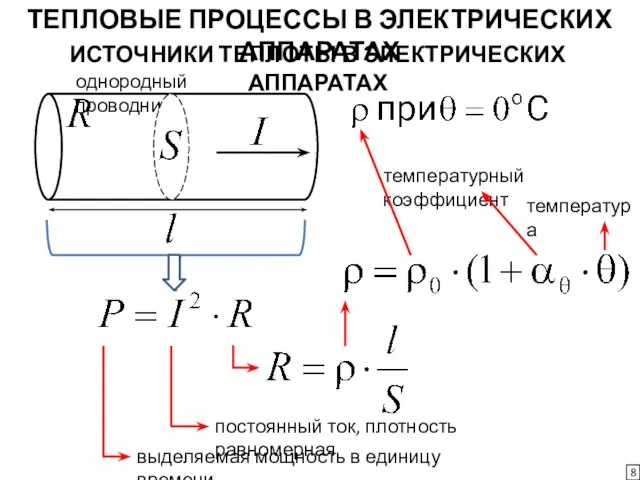
ТЕПЛОВЫЕ ПРОЦЕССЫ В ЭЛЕКТРИЧЕСКИХ АППАРАТАХ
8
ИСТОЧНИКИ ТЕПЛОТЫ В ЭЛЕКТРИЧЕСКИХ АППАРАТАХ
однородный проводник
постоянный ток,
ТЕПЛОВЫЕ ПРОЦЕССЫ В ЭЛЕКТРИЧЕСКИХ АППАРАТАХ
8
ИСТОЧНИКИ ТЕПЛОТЫ В ЭЛЕКТРИЧЕСКИХ АППАРАТАХ
однородный проводник
постоянный ток,
9
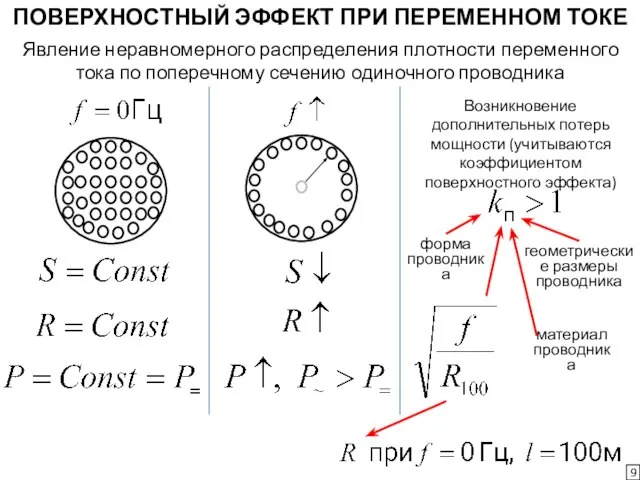
ПОВЕРХНОСТНЫЙ ЭФФЕКТ ПРИ ПЕРЕМЕННОМ ТОКЕ
Явление неравномерного распределения плотности переменного тока по
9
ПОВЕРХНОСТНЫЙ ЭФФЕКТ ПРИ ПЕРЕМЕННОМ ТОКЕ
Явление неравномерного распределения плотности переменного тока по
10
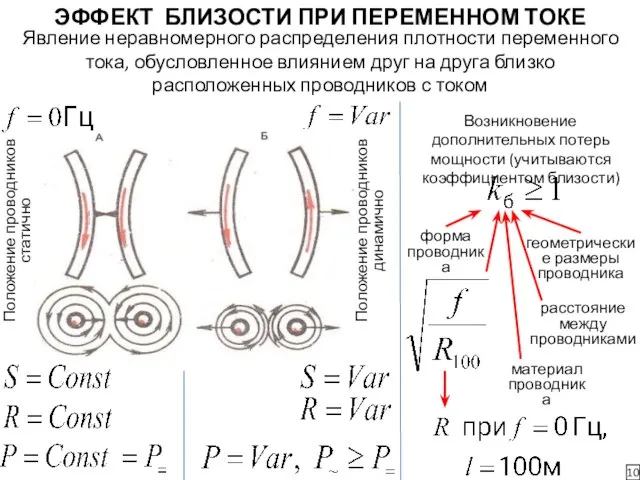
ЭФФЕКТ БЛИЗОСТИ ПРИ ПЕРЕМЕННОМ ТОКЕ
Явление неравномерного распределения плотности переменного тока, обусловленное
10
ЭФФЕКТ БЛИЗОСТИ ПРИ ПЕРЕМЕННОМ ТОКЕ
Явление неравномерного распределения плотности переменного тока, обусловленное
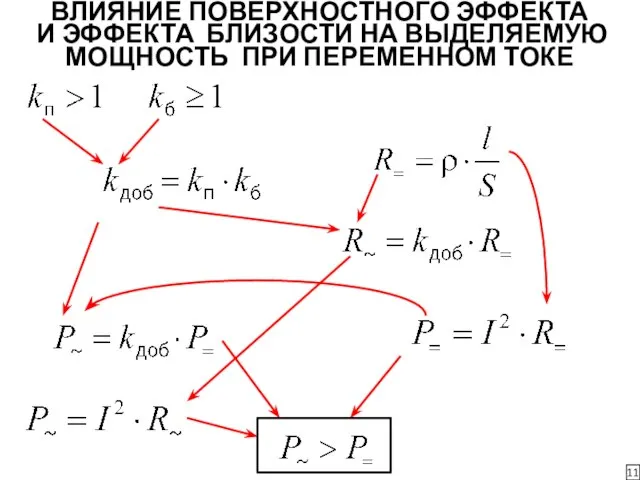
ВЛИЯНИЕ ПОВЕРХНОСТНОГО ЭФФЕКТА
И ЭФФЕКТА БЛИЗОСТИ НА ВЫДЕЛЯЕМУЮ МОЩНОСТЬ ПРИ ПЕРЕМЕННОМ
ВЛИЯНИЕ ПОВЕРХНОСТНОГО ЭФФЕКТА
И ЭФФЕКТА БЛИЗОСТИ НА ВЫДЕЛЯЕМУЮ МОЩНОСТЬ ПРИ ПЕРЕМЕННОМ
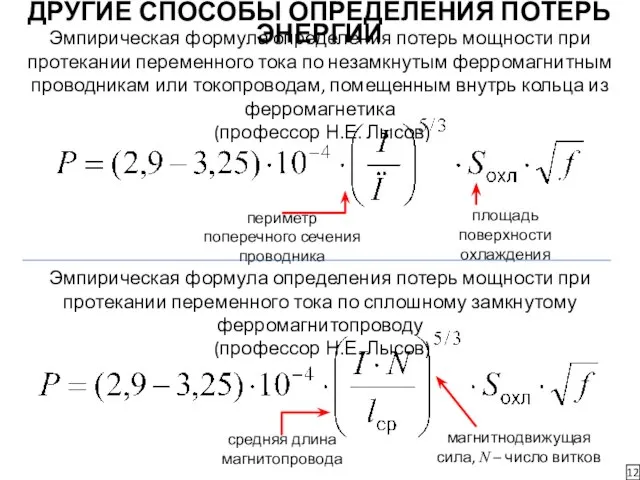
ДРУГИЕ СПОСОБЫ ОПРЕДЕЛЕНИЯ ПОТЕРЬ ЭНЕРГИИ
12
Эмпирическая формула определения потерь мощности при протекании
ДРУГИЕ СПОСОБЫ ОПРЕДЕЛЕНИЯ ПОТЕРЬ ЭНЕРГИИ
12
Эмпирическая формула определения потерь мощности при протекании
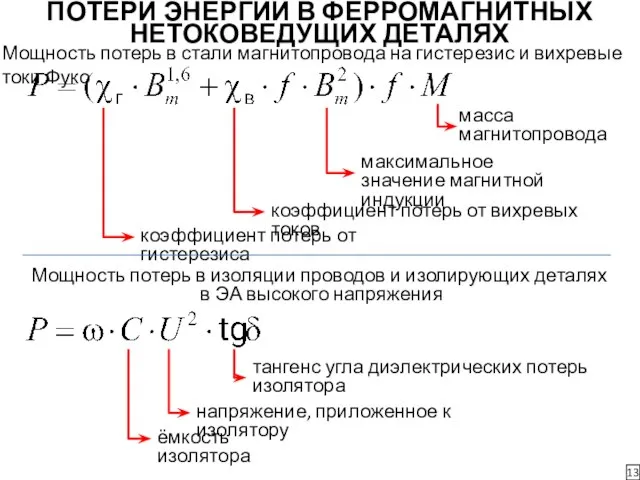
ПОТЕРИ ЭНЕРГИИ В ФЕРРОМАГНИТНЫХ НЕТОКОВЕДУЩИХ ДЕТАЛЯХ
13
Мощность потерь в стали магнитопровода на
ПОТЕРИ ЭНЕРГИИ В ФЕРРОМАГНИТНЫХ НЕТОКОВЕДУЩИХ ДЕТАЛЯХ
13
Мощность потерь в стали магнитопровода на
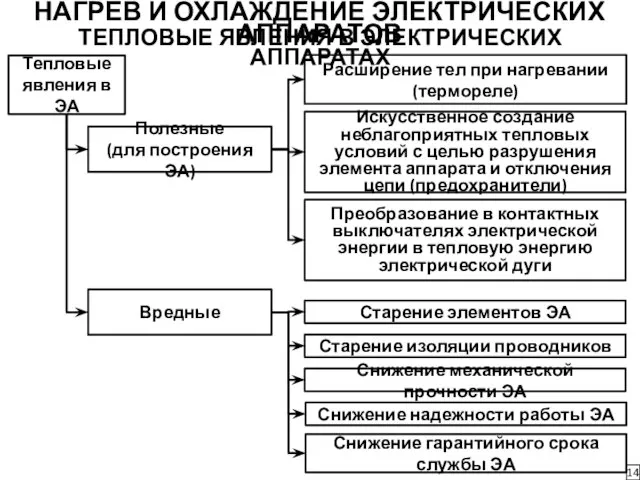
НАГРЕВ И ОХЛАЖДЕНИЕ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
Тепловые явления в ЭА
Полезные
(для построения ЭА)
Расширение тел
НАГРЕВ И ОХЛАЖДЕНИЕ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
Тепловые явления в ЭА
Полезные
(для построения ЭА)
Расширение тел
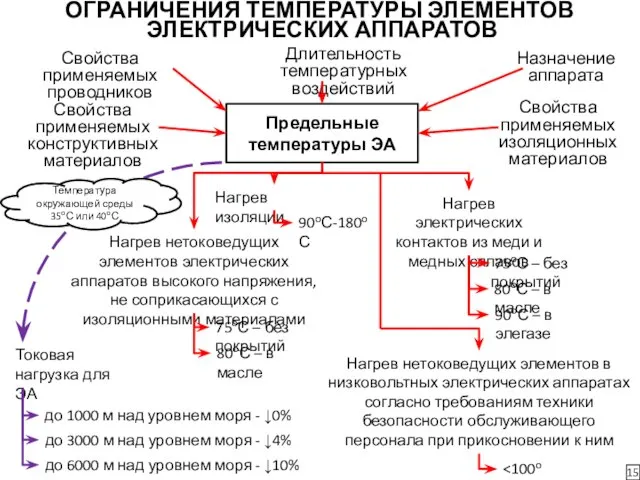
ОГРАНИЧЕНИЯ ТЕМПЕРАТУРЫ ЭЛЕМЕНТОВ
ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
15
Предельные температуры ЭА
Свойства применяемых проводников
Свойства применяемых изоляционных
ОГРАНИЧЕНИЯ ТЕМПЕРАТУРЫ ЭЛЕМЕНТОВ
ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
15
Предельные температуры ЭА
Свойства применяемых проводников
Свойства применяемых изоляционных
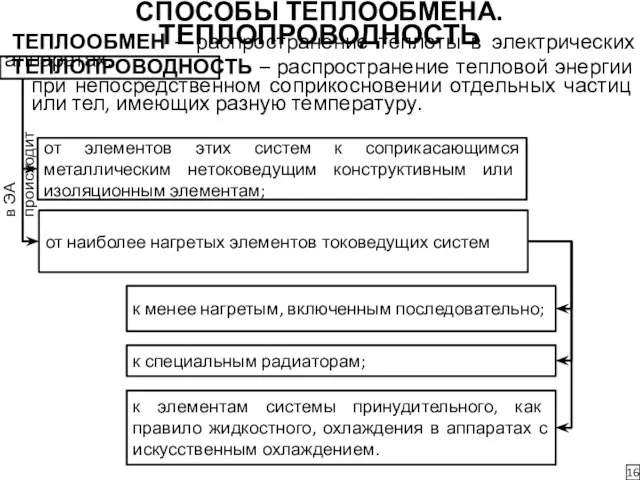
СПОСОБЫ ТЕПЛООБМЕНА. ТЕПЛОПРОВОДНОСТЬ
16
ТЕПЛООБМЕН – распространение теплоты в электрических аппаратах.
ТЕПЛОПРОВОДНОСТЬ
СПОСОБЫ ТЕПЛООБМЕНА. ТЕПЛОПРОВОДНОСТЬ
16
ТЕПЛООБМЕН – распространение теплоты в электрических аппаратах.
ТЕПЛОПРОВОДНОСТЬ
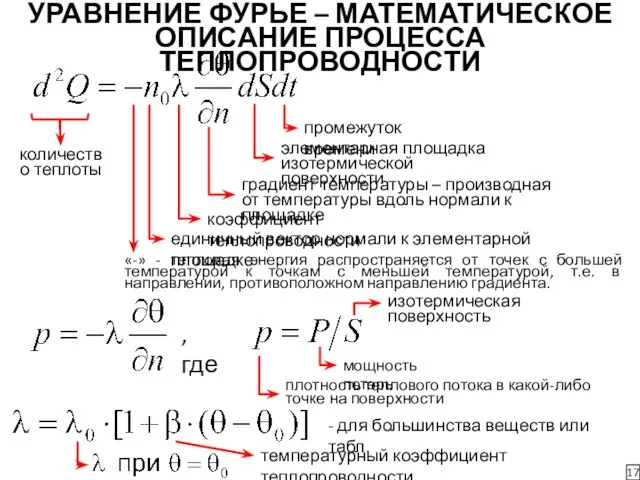
УРАВНЕНИЕ ФУРЬЕ – МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ПРОЦЕССА ТЕПЛОПРОВОДНОСТИ
17
количество теплоты
элементарная площадка изотермической поверхности
промежуток
УРАВНЕНИЕ ФУРЬЕ – МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ПРОЦЕССА ТЕПЛОПРОВОДНОСТИ
17
количество теплоты
элементарная площадка изотермической поверхности
промежуток
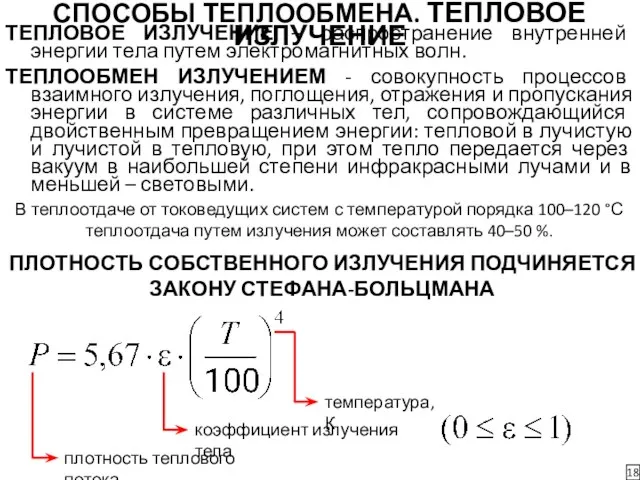
СПОСОБЫ ТЕПЛООБМЕНА. ТЕПЛОВОЕ ИЗЛУЧЕНИЕ
18
ТЕПЛОВОЕ ИЗЛУЧЕНИЕ – распространение внутренней энергии тела путем
СПОСОБЫ ТЕПЛООБМЕНА. ТЕПЛОВОЕ ИЗЛУЧЕНИЕ
18
ТЕПЛОВОЕ ИЗЛУЧЕНИЕ – распространение внутренней энергии тела путем
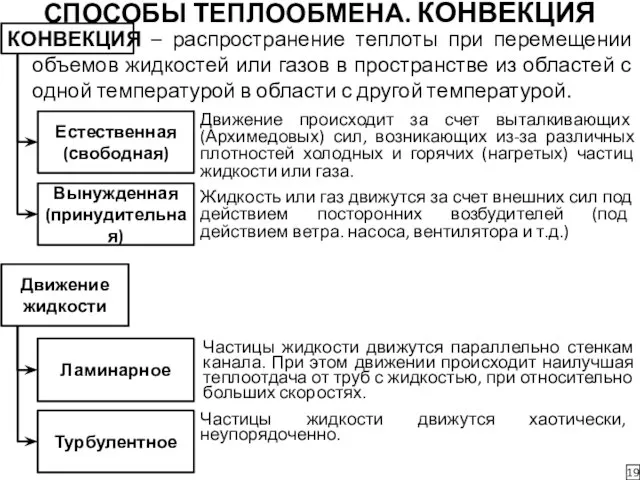
СПОСОБЫ ТЕПЛООБМЕНА. КОНВЕКЦИЯ
19
КОНВЕКЦИЯ – распространение теплоты при перемещении объемов жидкостей или
СПОСОБЫ ТЕПЛООБМЕНА. КОНВЕКЦИЯ
19
КОНВЕКЦИЯ – распространение теплоты при перемещении объемов жидкостей или

МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ КОНВЕКЦИИ
20
Система уравнений при аналитическом описании процесса конвекции в общем
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ КОНВЕКЦИИ
20
Система уравнений при аналитическом описании процесса конвекции в общем
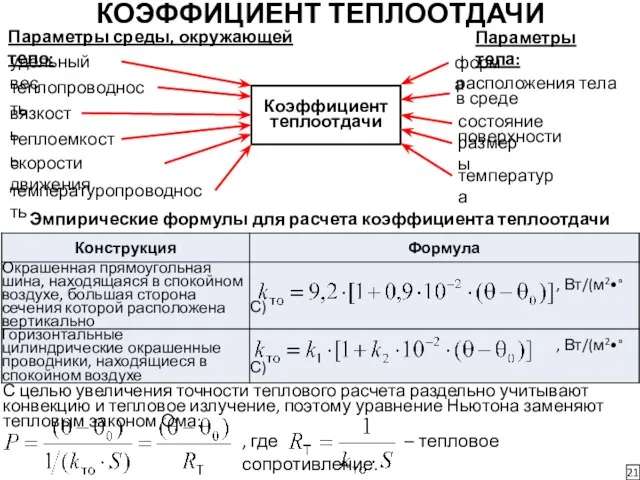
Коэффициент теплоотдачи
КОЭФФИЦИЕНТ ТЕПЛООТДАЧИ
21
удельный вес
теплопроводность
вязкость
теплоемкость
температуропроводность
форма
расположения тела в среде
состояние поверхности
размеры
скорости движения
температура
Параметры среды, окружающей
Коэффициент теплоотдачи
КОЭФФИЦИЕНТ ТЕПЛООТДАЧИ
21
удельный вес
теплопроводность
вязкость
теплоемкость
температуропроводность
форма
расположения тела в среде
состояние поверхности
размеры
скорости движения
температура
Параметры среды, окружающей
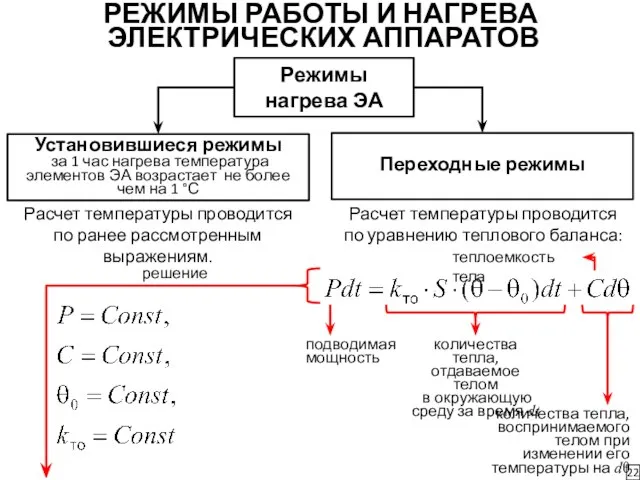
РЕЖИМЫ РАБОТЫ И НАГРЕВА
ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
22
Режимы нагрева ЭА
Установившиеся режимы
за 1
РЕЖИМЫ РАБОТЫ И НАГРЕВА
ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
22
Режимы нагрева ЭА
Установившиеся режимы
за 1
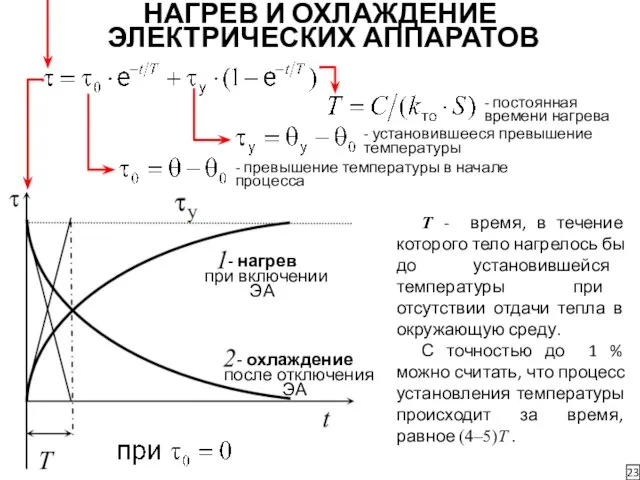
НАГРЕВ И ОХЛАЖДЕНИЕ
ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
23
- превышение температуры в начале процесса
- установившееся
НАГРЕВ И ОХЛАЖДЕНИЕ
ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
23
- превышение температуры в начале процесса
- установившееся
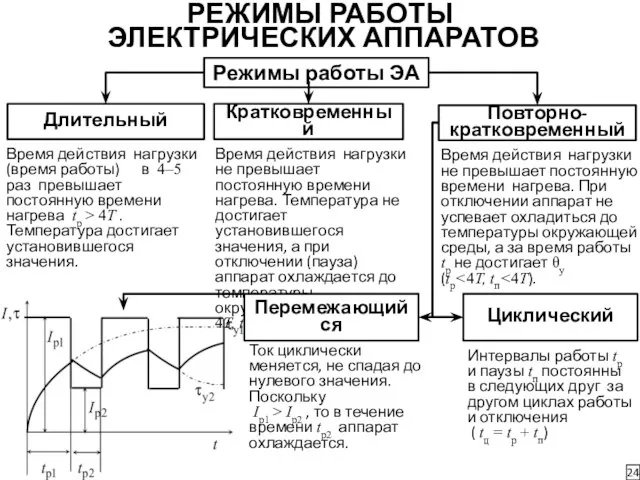
РЕЖИМЫ РАБОТЫ
ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
24
Режимы работы ЭА
Длительный
Кратковременный
Повторно-кратковременный
Время действия нагрузки (время работы) в
РЕЖИМЫ РАБОТЫ
ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
24
Режимы работы ЭА
Длительный
Кратковременный
Повторно-кратковременный
Время действия нагрузки (время работы) в
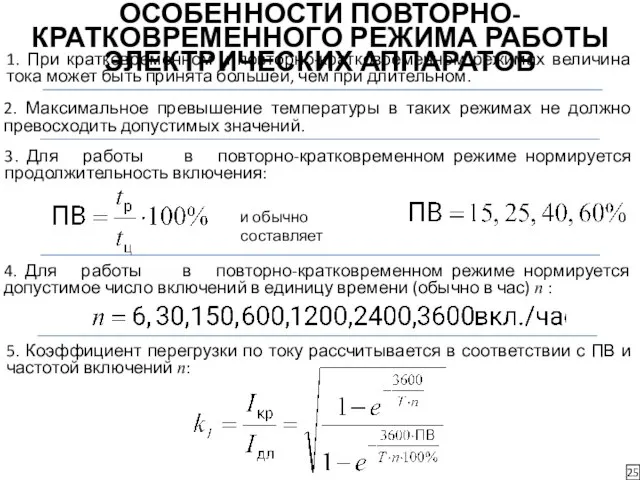
ОСОБЕННОСТИ ПОВТОРНО-КРАТКОВРЕМЕННОГО РЕЖИМА РАБОТЫ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
25
1. При кратковременном и повторно-кратковременном режимах
ОСОБЕННОСТИ ПОВТОРНО-КРАТКОВРЕМЕННОГО РЕЖИМА РАБОТЫ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
25
1. При кратковременном и повторно-кратковременном режимах
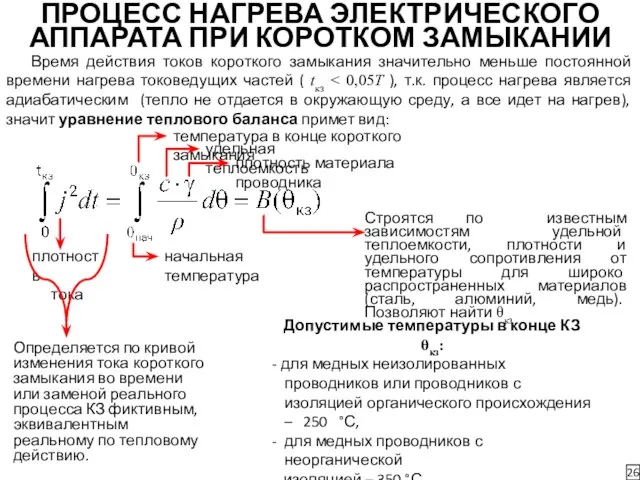
ПРОЦЕСС НАГРЕВА ЭЛЕКТРИЧЕСКОГО АППАРАТА ПРИ КОРОТКОМ ЗАМЫКАНИИ
26
Время действия токов короткого замыкания
ПРОЦЕСС НАГРЕВА ЭЛЕКТРИЧЕСКОГО АППАРАТА ПРИ КОРОТКОМ ЗАМЫКАНИИ
26
Время действия токов короткого замыкания
ТЕРМИЧЕСКАЯ СТОЙКОСТЬ
ЭЛЕКТРИЧЕСКОГО АППАРАТА
27
Это способность выдерживать кратковременное тепловое действие токов короткого
ТЕРМИЧЕСКАЯ СТОЙКОСТЬ
ЭЛЕКТРИЧЕСКОГО АППАРАТА
27
Это способность выдерживать кратковременное тепловое действие токов короткого
ЭЛЕКТРОДИНАМИЧЕСКИЕ СИЛЫ
28
Электродинамические силы (электродинамические усилия - ЭДУ) - это механические силы,
ЭЛЕКТРОДИНАМИЧЕСКИЕ СИЛЫ
28
Электродинамические силы (электродинамические усилия - ЭДУ) - это механические силы,
МЕТОДЫ РАСЧЕТА ЭЛЕКТРОДИНАМИЧЕСКИХ СИЛ
29
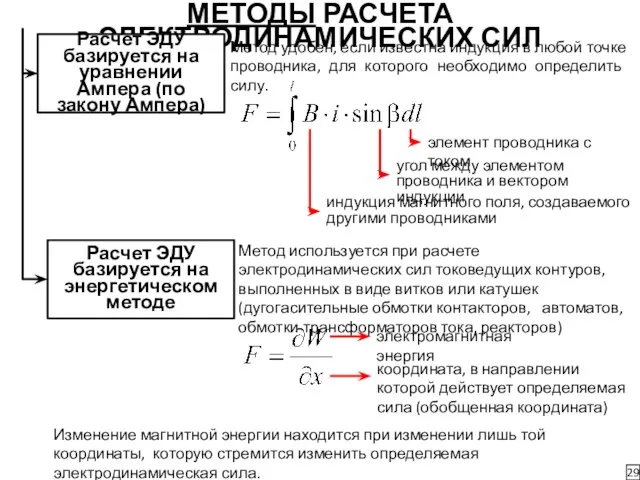
Расчет ЭДУ базируется на уравнении Ампера (по закону
МЕТОДЫ РАСЧЕТА ЭЛЕКТРОДИНАМИЧЕСКИХ СИЛ
29
Расчет ЭДУ базируется на уравнении Ампера (по закону
УРАВНЕНИЕ ЭНЕРГЕТИЧЕСКОГО МЕТОДА ПРИ ОПРЕДЕЛЕНИИ ЭЛЕКТРОДИНАМИЧЕСКИХ СИЛ
30
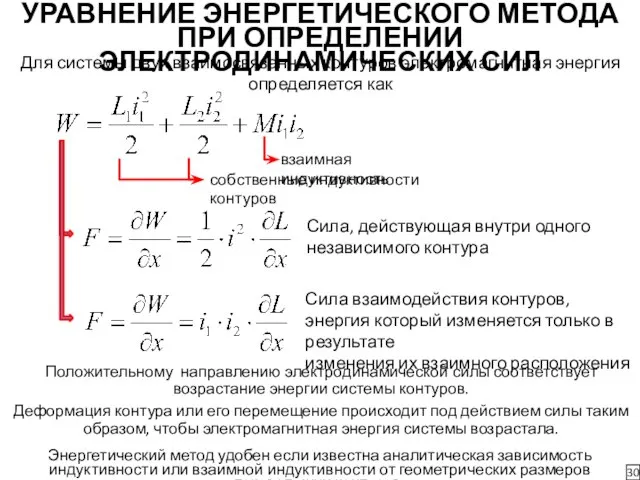
Для системы двух взаимосвязанных
УРАВНЕНИЕ ЭНЕРГЕТИЧЕСКОГО МЕТОДА ПРИ ОПРЕДЕЛЕНИИ ЭЛЕКТРОДИНАМИЧЕСКИХ СИЛ
30
Для системы двух взаимосвязанных
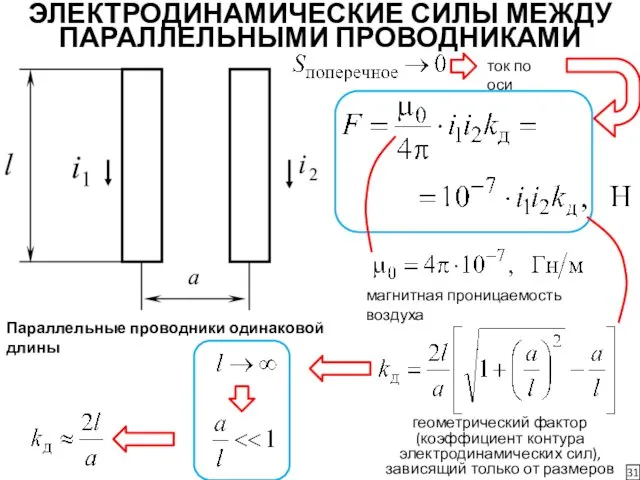
ЭЛЕКТРОДИНАМИЧЕСКИЕ СИЛЫ МЕЖДУ ПАРАЛЛЕЛЬНЫМИ ПРОВОДНИКАМИ
31
Параллельные проводники одинаковой длины
магнитная проницаемость воздуха
геометрический
ЭЛЕКТРОДИНАМИЧЕСКИЕ СИЛЫ МЕЖДУ ПАРАЛЛЕЛЬНЫМИ ПРОВОДНИКАМИ
31
Параллельные проводники одинаковой длины
магнитная проницаемость воздуха
геометрический
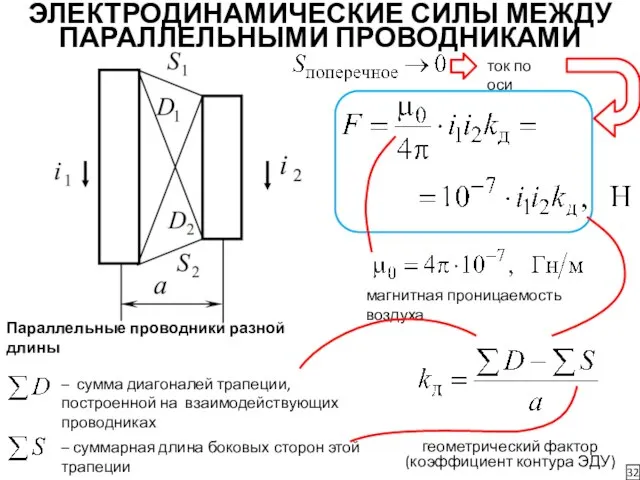
ЭЛЕКТРОДИНАМИЧЕСКИЕ СИЛЫ МЕЖДУ ПАРАЛЛЕЛЬНЫМИ ПРОВОДНИКАМИ
32
Параллельные проводники разной длины
магнитная проницаемость воздуха
геометрический
ЭЛЕКТРОДИНАМИЧЕСКИЕ СИЛЫ МЕЖДУ ПАРАЛЛЕЛЬНЫМИ ПРОВОДНИКАМИ
32
Параллельные проводники разной длины
магнитная проницаемость воздуха
геометрический

ФАКТОРЫ, ВЛИЯЮЩИЕ НА ЭЛЕКТРОДИНАМИЧЕСКУЮ СИЛУ
33
взаимное расположение проводников с токами
форма проводников с
ФАКТОРЫ, ВЛИЯЮЩИЕ НА ЭЛЕКТРОДИНАМИЧЕСКУЮ СИЛУ
33
взаимное расположение проводников с токами
форма проводников с

При индуктивность витка
ЭЛЕКТРОДИНАМИЧЕСКАЯ СИЛА
КРУГОВОГО ВИТКА С ТОКОМ
34
ЭДУ, приложенная к окружности стремится
При индуктивность витка
ЭЛЕКТРОДИНАМИЧЕСКАЯ СИЛА
КРУГОВОГО ВИТКА С ТОКОМ
34
ЭДУ, приложенная к окружности стремится
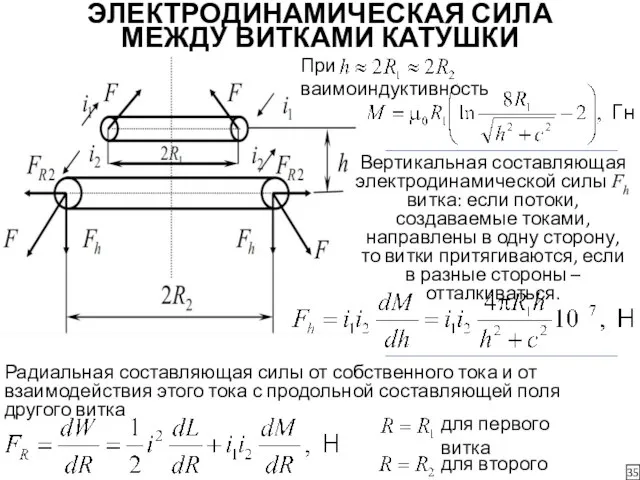
ЭЛЕКТРОДИНАМИЧЕСКАЯ СИЛА
МЕЖДУ ВИТКАМИ КАТУШКИ
35
При ваимоиндуктивность
Вертикальная составляющая электродинамической силы Fh витка: если
ЭЛЕКТРОДИНАМИЧЕСКАЯ СИЛА
МЕЖДУ ВИТКАМИ КАТУШКИ
35
При ваимоиндуктивность
Вертикальная составляющая электродинамической силы Fh витка: если

ЭЛЕКТРОДИНАМИЧЕСКАЯ СИЛА
КАТУШКИ
36
увеличение среднего диаметра
сжатие по высоте
Для катушки, имеющей w витков, электродинамическая
ЭЛЕКТРОДИНАМИЧЕСКАЯ СИЛА
КАТУШКИ
36
увеличение среднего диаметра
сжатие по высоте
Для катушки, имеющей w витков, электродинамическая
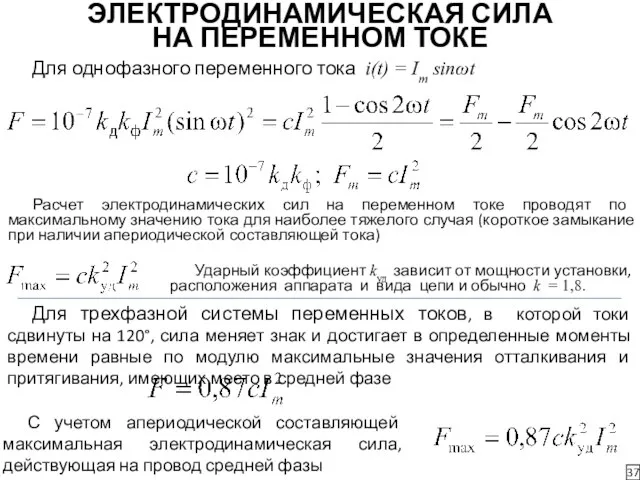
ЭЛЕКТРОДИНАМИЧЕСКАЯ СИЛА
НА ПЕРЕМЕННОМ ТОКЕ
37
Для однофазного переменного тока i(t) = Im sinωt
Расчет
ЭЛЕКТРОДИНАМИЧЕСКАЯ СИЛА
НА ПЕРЕМЕННОМ ТОКЕ
37
Для однофазного переменного тока i(t) = Im sinωt
Расчет
ЭЛЕКТРОДИНАМИЧЕСКАЯ СТОЙКОСТЬ
38
- это способность противостоять без повреждений и нарушений функционального
ЭЛЕКТРОДИНАМИЧЕСКАЯ СТОЙКОСТЬ
38
- это способность противостоять без повреждений и нарушений функционального
МАГНИТНЫЕ ЦЕПИ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
39
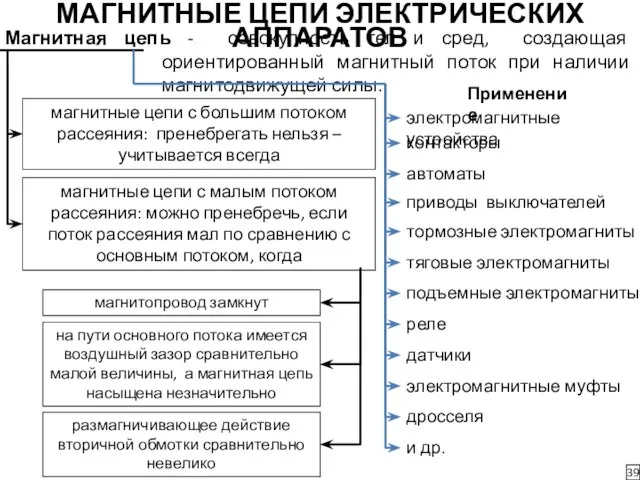
Магнитная цепь - совокупность тел и сред, создающая
МАГНИТНЫЕ ЦЕПИ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
39
Магнитная цепь - совокупность тел и сред, создающая
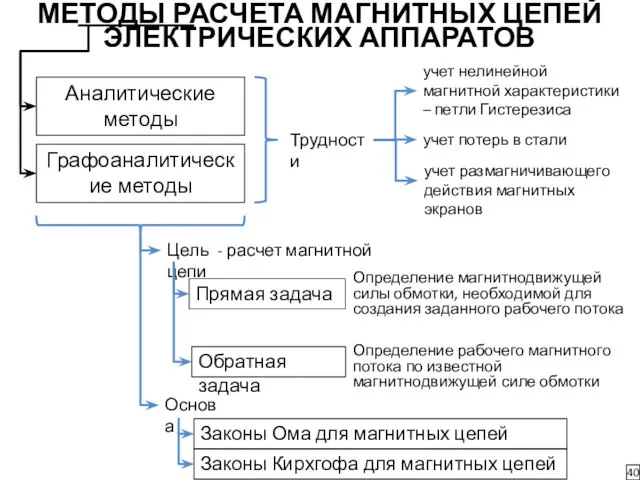
МЕТОДЫ РАСЧЕТА МАГНИТНЫХ ЦЕПЕЙ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
40
Графоаналитические методы
Аналитические методы
Трудности
учет нелинейной
МЕТОДЫ РАСЧЕТА МАГНИТНЫХ ЦЕПЕЙ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
40
Графоаналитические методы
Аналитические методы
Трудности
учет нелинейной
ЗАКОНЫ, ПРИМЕНЯЕМЫЕ ПРИ РАСЧЕТЕ МАГНИТНЫХ ЦЕПЕЙ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
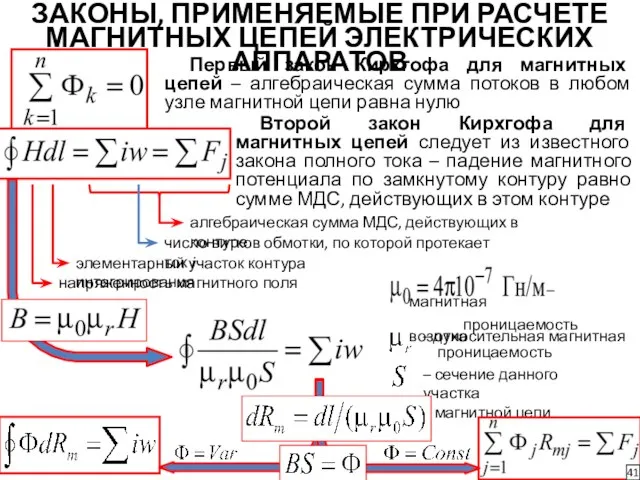
Первый закон Кирхгофа для
ЗАКОНЫ, ПРИМЕНЯЕМЫЕ ПРИ РАСЧЕТЕ МАГНИТНЫХ ЦЕПЕЙ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
Первый закон Кирхгофа для
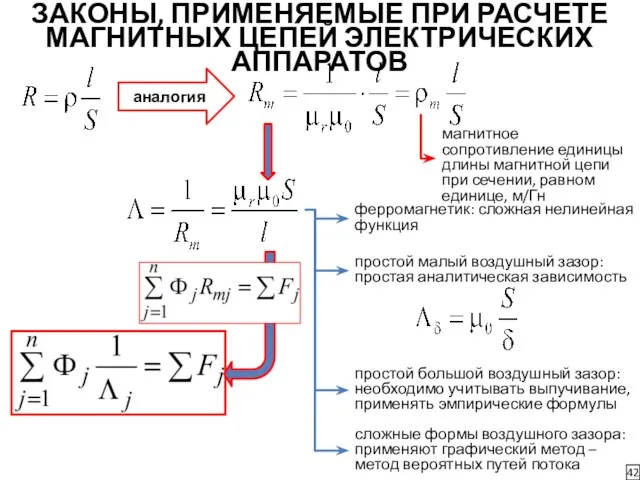
ЗАКОНЫ, ПРИМЕНЯЕМЫЕ ПРИ РАСЧЕТЕ МАГНИТНЫХ ЦЕПЕЙ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
42
аналогия
магнитное сопротивление единицы длины
ЗАКОНЫ, ПРИМЕНЯЕМЫЕ ПРИ РАСЧЕТЕ МАГНИТНЫХ ЦЕПЕЙ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
42
аналогия
магнитное сопротивление единицы длины
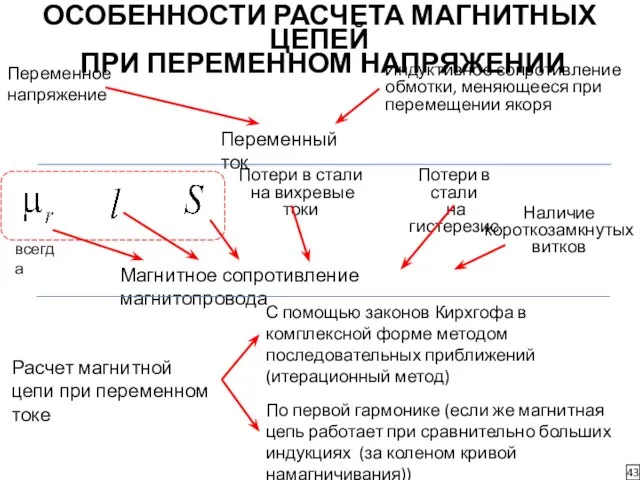
ОСОБЕННОСТИ РАСЧЕТА МАГНИТНЫХ ЦЕПЕЙ
ПРИ ПЕРЕМЕННОМ НАПРЯЖЕНИИ
43
Переменный ток
Переменное напряжение
Индуктивное сопротивление обмотки,
ОСОБЕННОСТИ РАСЧЕТА МАГНИТНЫХ ЦЕПЕЙ
ПРИ ПЕРЕМЕННОМ НАПРЯЖЕНИИ
43
Переменный ток
Переменное напряжение
Индуктивное сопротивление обмотки,
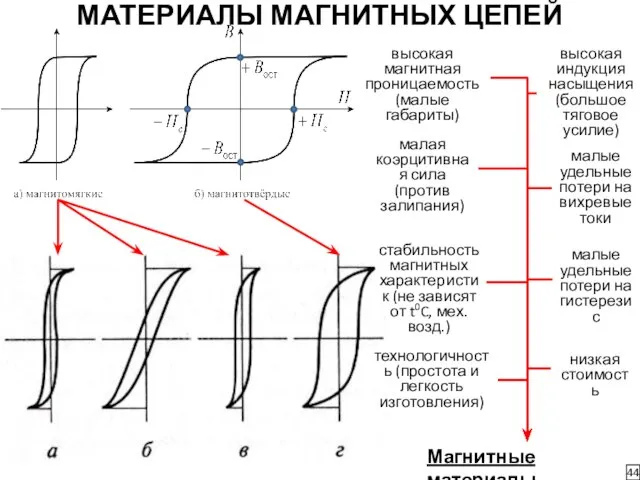
МАТЕРИАЛЫ МАГНИТНЫХ ЦЕПЕЙ
44
Магнитные материалы
высокая магнитная проницаемость
(малые габариты)
высокая индукция насыщения (большое тяговое
МАТЕРИАЛЫ МАГНИТНЫХ ЦЕПЕЙ
44
Магнитные материалы
высокая магнитная проницаемость
(малые габариты)
высокая индукция насыщения (большое тяговое
ЭЛЕКТРОМАГНИТЫ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
45
Электромагнитные устройства служат для создания магнитного поля с помощью
ЭЛЕКТРОМАГНИТЫ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
45
Электромагнитные устройства служат для создания магнитного поля с помощью
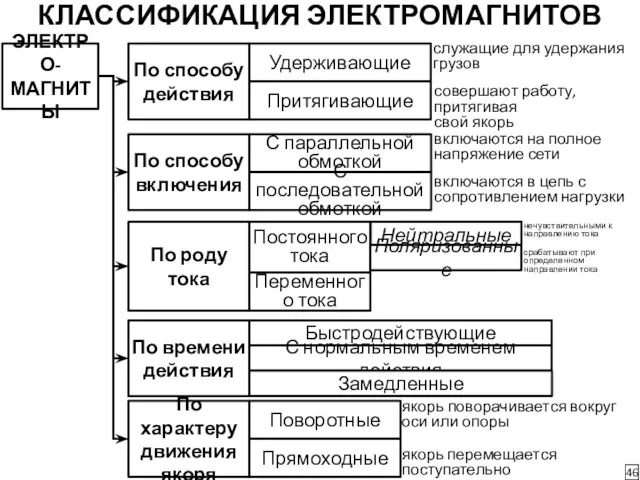
КЛАССИФИКАЦИЯ ЭЛЕКТРОМАГНИТОВ
46
ЭЛЕКТРО-МАГНИТЫ
По способу действия
По способу включения
По роду тока
По времени действия
По характеру
КЛАССИФИКАЦИЯ ЭЛЕКТРОМАГНИТОВ
46
ЭЛЕКТРО-МАГНИТЫ
По способу действия
По способу включения
По роду тока
По времени действия
По характеру
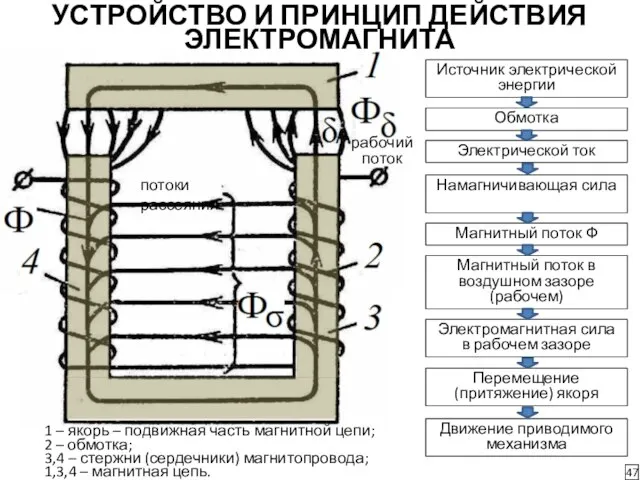
УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯ ЭЛЕКТРОМАГНИТА
47
1 – якорь – подвижная часть магнитной
УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯ ЭЛЕКТРОМАГНИТА
47
1 – якорь – подвижная часть магнитной

РАЗНОВИДНОСТИ ЭЛЕКТРОМАГНИТНЫХ СИСТЕМ
48
клапанная (а); броневая (б); Ш-образная (в); соленоидная (г);
РАЗНОВИДНОСТИ ЭЛЕКТРОМАГНИТНЫХ СИСТЕМ
48
клапанная (а); броневая (б); Ш-образная (в); соленоидная (г);
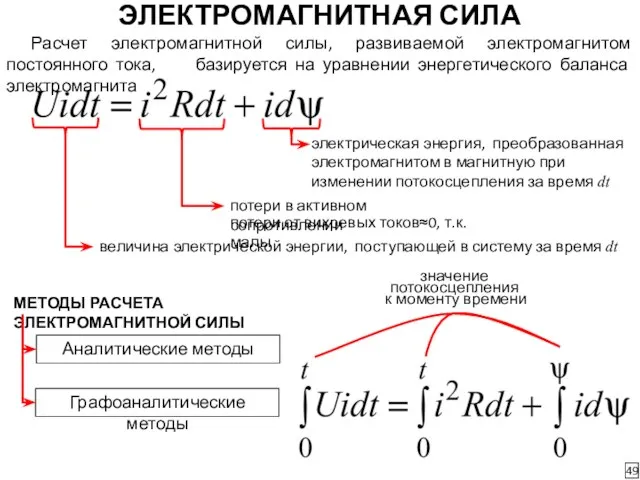
ЭЛЕКТРОМАГНИТНАЯ СИЛА
49
величина электрической энергии, поступающей в систему за время dt
Расчет электромагнитной
ЭЛЕКТРОМАГНИТНАЯ СИЛА
49
величина электрической энергии, поступающей в систему за время dt
Расчет электромагнитной
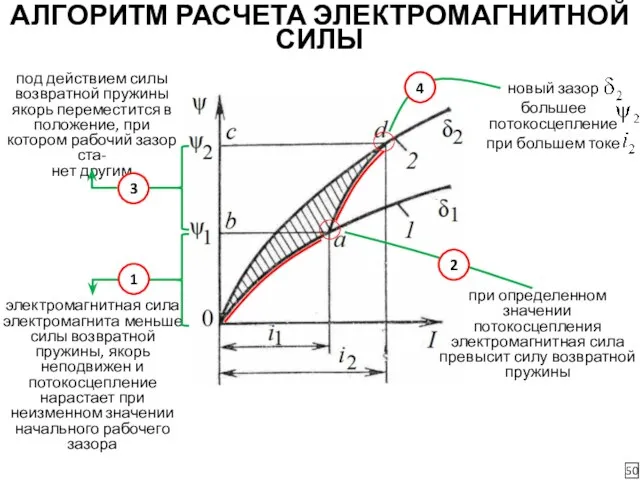
АЛГОРИТМ РАСЧЕТА ЭЛЕКТРОМАГНИТНОЙ СИЛЫ
50
электромагнитная сила электромагнита меньше силы возвратной пружины, якорь
АЛГОРИТМ РАСЧЕТА ЭЛЕКТРОМАГНИТНОЙ СИЛЫ
50
электромагнитная сила электромагнита меньше силы возвратной пружины, якорь
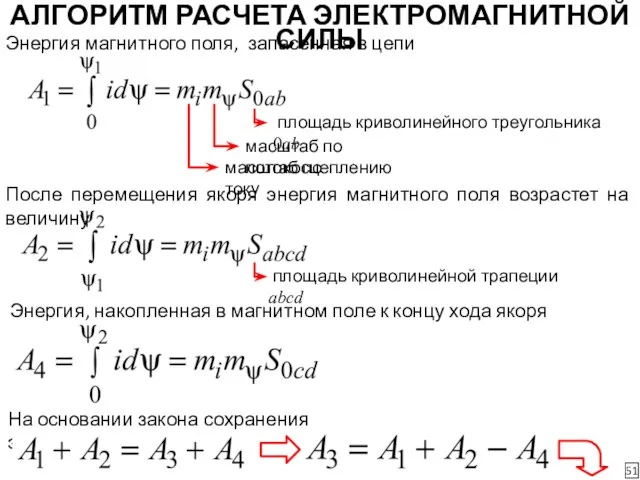
Энергия магнитного поля, запасенная в цепи
АЛГОРИТМ РАСЧЕТА ЭЛЕКТРОМАГНИТНОЙ СИЛЫ
51
масштаб по току
масштаб
Энергия магнитного поля, запасенная в цепи
АЛГОРИТМ РАСЧЕТА ЭЛЕКТРОМАГНИТНОЙ СИЛЫ
51
масштаб по току
масштаб
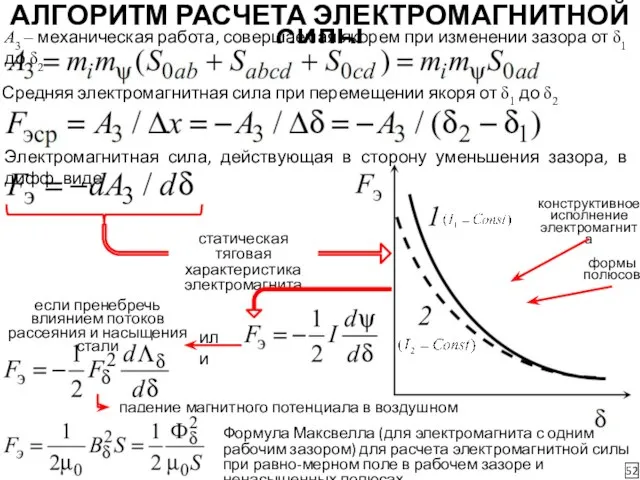
АЛГОРИТМ РАСЧЕТА ЭЛЕКТРОМАГНИТНОЙ СИЛЫ
Средняя электромагнитная сила при перемещении якоря от δ1
АЛГОРИТМ РАСЧЕТА ЭЛЕКТРОМАГНИТНОЙ СИЛЫ
Средняя электромагнитная сила при перемещении якоря от δ1
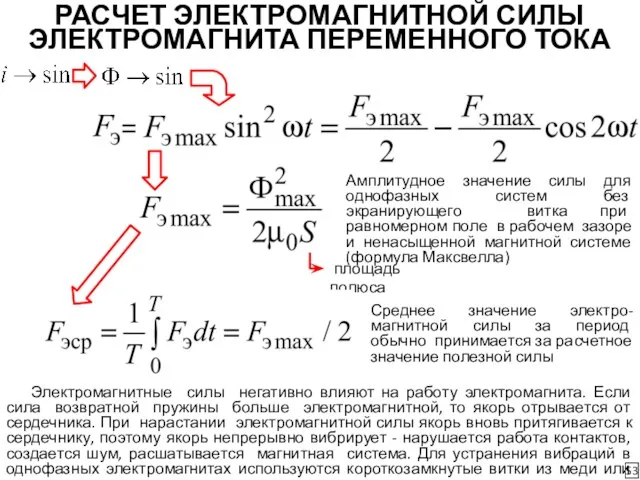
РАСЧЕТ ЭЛЕКТРОМАГНИТНОЙ СИЛЫ ЭЛЕКТРОМАГНИТА ПЕРЕМЕННОГО ТОКА
53
Амплитудное значение силы для однофазных систем
РАСЧЕТ ЭЛЕКТРОМАГНИТНОЙ СИЛЫ ЭЛЕКТРОМАГНИТА ПЕРЕМЕННОГО ТОКА
53
Амплитудное значение силы для однофазных систем
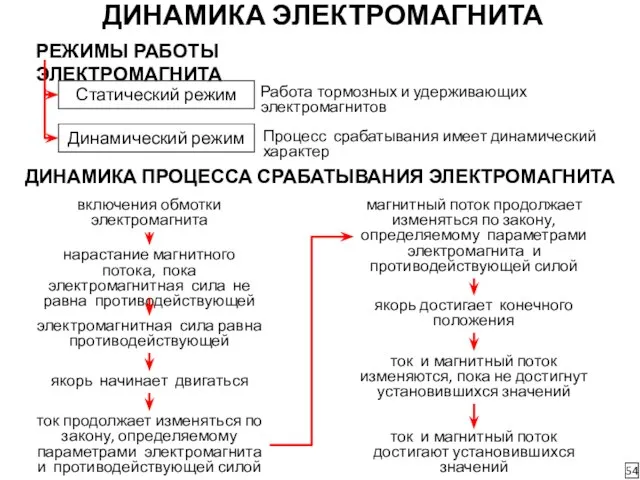
ДИНАМИКА ЭЛЕКТРОМАГНИТА
54
РЕЖИМЫ РАБОТЫ ЭЛЕКТРОМАГНИТА
Статический режим
Динамический режим
Работа тормозных и удерживающих электромагнитов
Процесс
ДИНАМИКА ЭЛЕКТРОМАГНИТА
54
РЕЖИМЫ РАБОТЫ ЭЛЕКТРОМАГНИТА
Статический режим
Динамический режим
Работа тормозных и удерживающих электромагнитов
Процесс
ДИНАМИКА ВКЛЮЧЕНИЯ ЭЛЕКТРОМАГНИТА
55
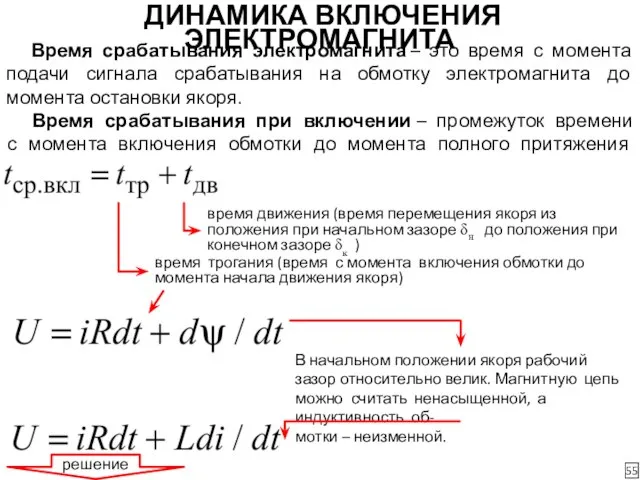
Время срабатывания электромагнита – это время с момента
ДИНАМИКА ВКЛЮЧЕНИЯ ЭЛЕКТРОМАГНИТА
55
Время срабатывания электромагнита – это время с момента
ДИНАМИКА ВКЛЮЧЕНИЯ ЭЛЕКТРОМАГНИТА
56
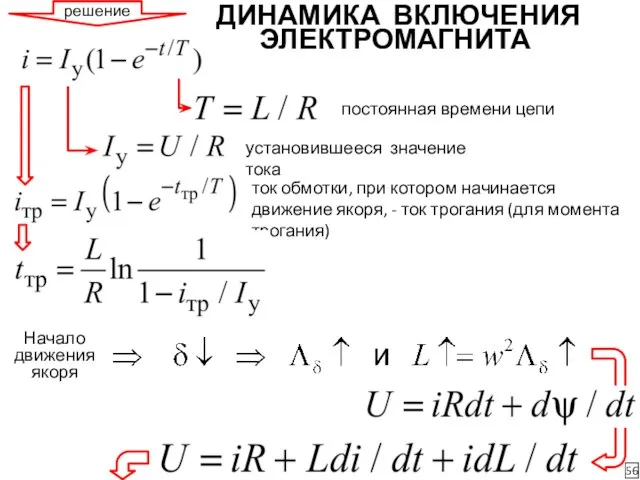
установившееся значение тока
постоянная времени цепи
ток обмотки, при котором
ДИНАМИКА ВКЛЮЧЕНИЯ ЭЛЕКТРОМАГНИТА
56
установившееся значение тока
постоянная времени цепи
ток обмотки, при котором

ДИНАМИКА ВКЛЮЧЕНИЯ ЭЛЕКТРОМАГНИТА
57
Ток растет, якорь трогается
При движении якоря → dL/dt>0
ДИНАМИКА ВКЛЮЧЕНИЯ ЭЛЕКТРОМАГНИТА
57
Ток растет, якорь трогается
При движении якоря → dL/dt>0
ДИНАМИКА ОТКЛЮЧЕНИЯ ЭЛЕКТРОМАГНИТА
58
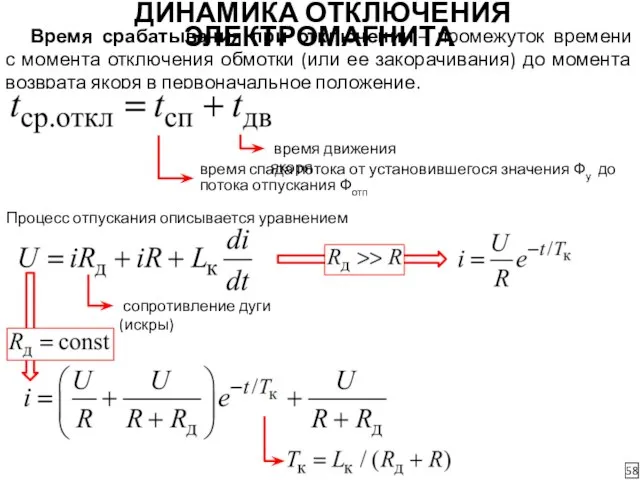
Время срабатывания при отключении – промежуток времени с
ДИНАМИКА ОТКЛЮЧЕНИЯ ЭЛЕКТРОМАГНИТА
58
Время срабатывания при отключении – промежуток времени с
ДИНАМИКА ОТКЛЮЧЕНИЯ ЭЛЕКТРОМАГНИТА
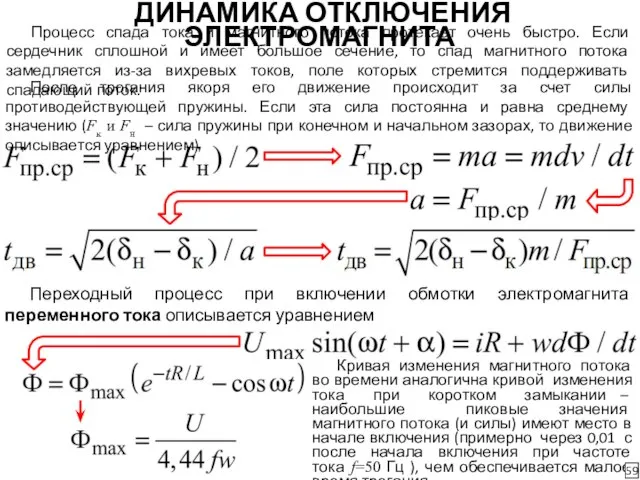
Процесс спада тока и магнитного потока протекает очень
ДИНАМИКА ОТКЛЮЧЕНИЯ ЭЛЕКТРОМАГНИТА
Процесс спада тока и магнитного потока протекает очень
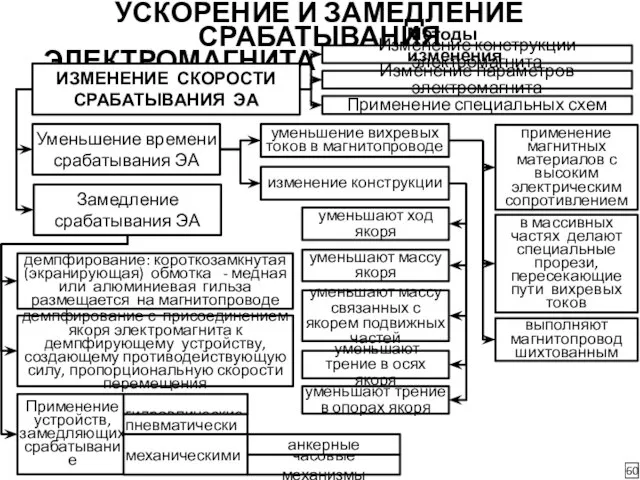
УСКОРЕНИЕ И ЗАМЕДЛЕНИЕ СРАБАТЫВАНИЯ
ЭЛЕКТРОМАГНИТА
60
ИЗМЕНЕНИЕ СКОРОСТИ СРАБАТЫВАНИЯ ЭА
Уменьшение времени срабатывания ЭА
Изменение
УСКОРЕНИЕ И ЗАМЕДЛЕНИЕ СРАБАТЫВАНИЯ
ЭЛЕКТРОМАГНИТА
60
ИЗМЕНЕНИЕ СКОРОСТИ СРАБАТЫВАНИЯ ЭА
Уменьшение времени срабатывания ЭА
Изменение
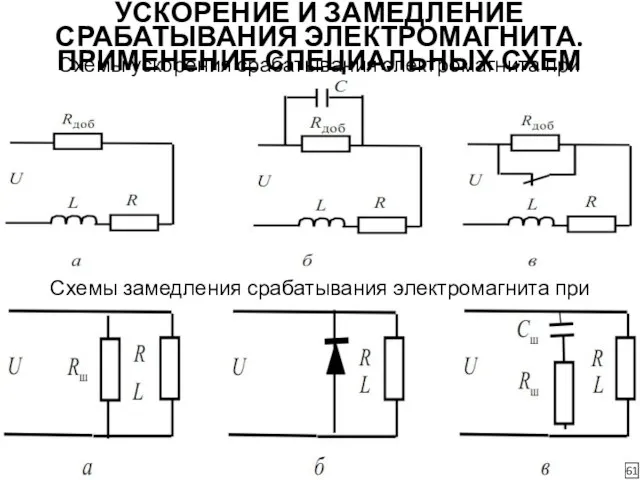
УСКОРЕНИЕ И ЗАМЕДЛЕНИЕ СРАБАТЫВАНИЯ ЭЛЕКТРОМАГНИТА. ПРИМЕНЕНИЕ СПЕЦИАЛЬНЫХ СХЕМ
Схемы ускорения срабатывания электромагнита
УСКОРЕНИЕ И ЗАМЕДЛЕНИЕ СРАБАТЫВАНИЯ ЭЛЕКТРОМАГНИТА. ПРИМЕНЕНИЕ СПЕЦИАЛЬНЫХ СХЕМ
Схемы ускорения срабатывания электромагнита
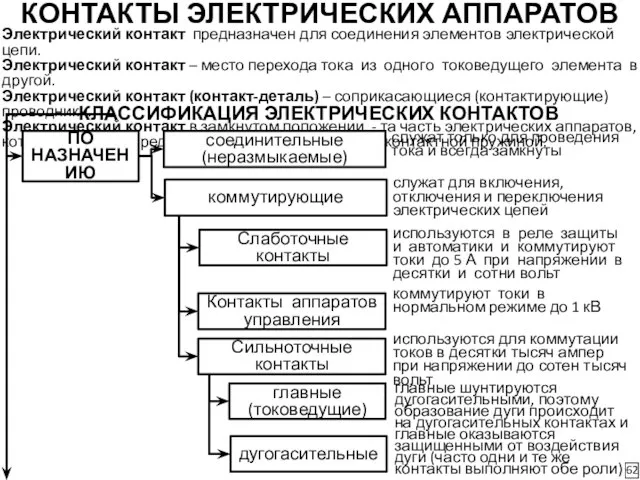
КОНТАКТЫ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
62
Электрический контакт предназначен для соединения элементов электрической цепи.
Электрический
КОНТАКТЫ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
62
Электрический контакт предназначен для соединения элементов электрической цепи.
Электрический

КОНТАКТЫ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
ПО КОНСТРУКТИВНОМУ ИСПОЛНЕНИЮ
соединительные (неразмыкаемые)
неподвижные
подвижные
неразъемные (сварные)
разъемные
КОНТАКТЫ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
ПО КОНСТРУКТИВНОМУ ИСПОЛНЕНИЮ
соединительные (неразмыкаемые)
неподвижные
подвижные
неразъемные (сварные)
разъемные
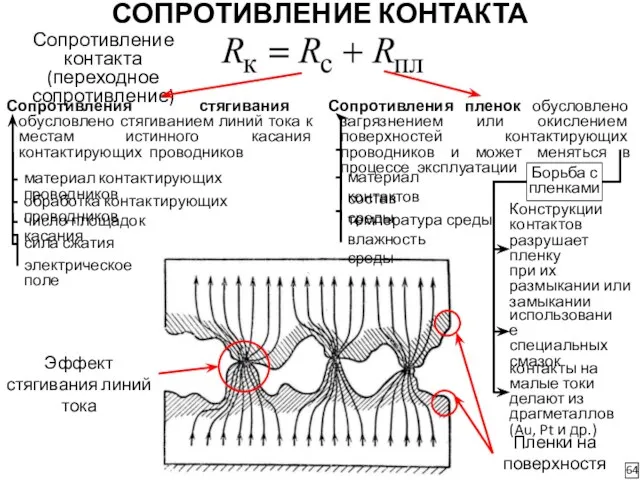
СОПРОТИВЛЕНИЕ КОНТАКТА
64
Сопротивление контакта (переходное сопротивление)
Сопротивления стягивания обусловлено стягиванием линий тока к
СОПРОТИВЛЕНИЕ КОНТАКТА
64
Сопротивление контакта (переходное сопротивление)
Сопротивления стягивания обусловлено стягиванием линий тока к

РАСЧЕТ СОПРОТИВЛЕНИЯ СТЯГИВАНИЯ КОНТАКТА
Для расчета сопротивления стягивания разработаны различные упрощающие модели
РАСЧЕТ СОПРОТИВЛЕНИЯ СТЯГИВАНИЯ КОНТАКТА
Для расчета сопротивления стягивания разработаны различные упрощающие модели
ПРАКТИЧЕСКИЙ РАСЧЕТ СОПРОТИВЛЕНИЯ КОНТАКТА
66
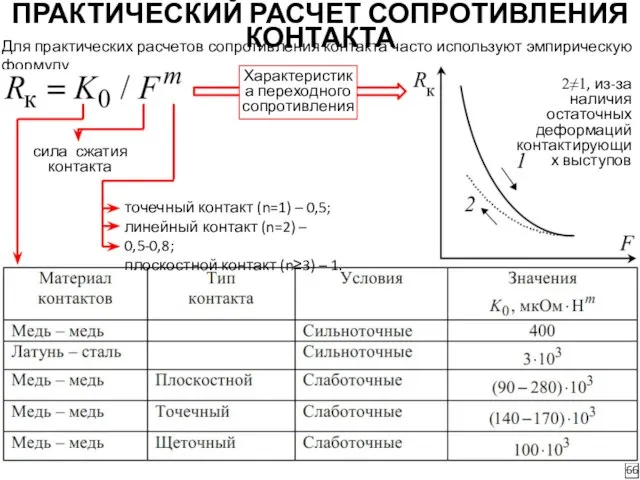
Для практических расчетов сопротивления контакта часто используют эмпирическую
ПРАКТИЧЕСКИЙ РАСЧЕТ СОПРОТИВЛЕНИЯ КОНТАКТА
66
Для практических расчетов сопротивления контакта часто используют эмпирическую
НАГРЕВ КОНТАКТА
67
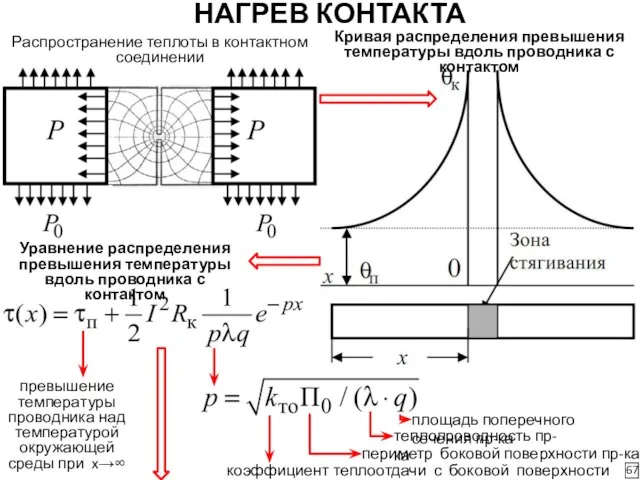
Распространение теплоты в контактном соединении
Кривая распределения превышения температуры вдоль
НАГРЕВ КОНТАКТА
67
Распространение теплоты в контактном соединении
Кривая распределения превышения температуры вдоль
НАГРЕВ КОНТАКТА
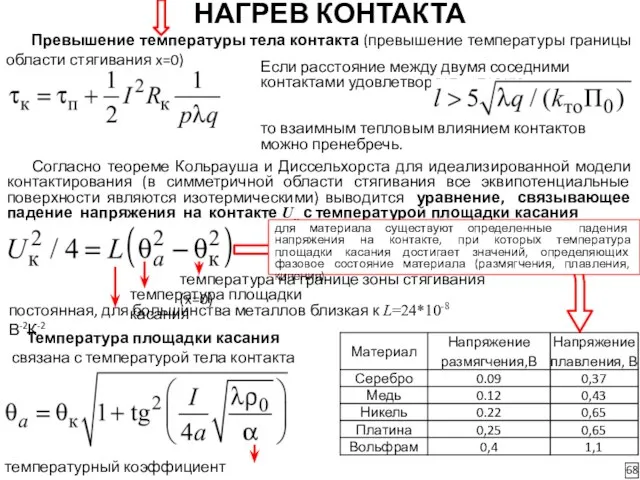
Превышение температуры тела контакта (превышение температуры границы области стягивания
НАГРЕВ КОНТАКТА
Превышение температуры тела контакта (превышение температуры границы области стягивания
НАГРЕВ КОНТАКТА
69
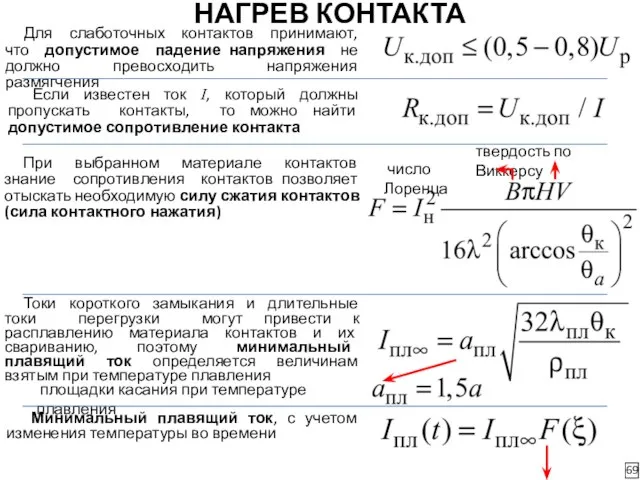
Для слаботочных контактов принимают, что допустимое падение напряжения не
НАГРЕВ КОНТАКТА
69
Для слаботочных контактов принимают, что допустимое падение напряжения не
НАГРЕВ КОНТАКТА
70
эмпирическая функция, зависящая
от
удельная теплоемкость материала
плотность материала
При практических
НАГРЕВ КОНТАКТА
70
эмпирическая функция, зависящая
от
удельная теплоемкость материала
плотность материала
При практических
РЕЖИМЫ РАБОТЫ КОНТАКТОВ
71
Условия работы контактов определяются их возможными состояниями (контакты замкнуты
РЕЖИМЫ РАБОТЫ КОНТАКТОВ
71
Условия работы контактов определяются их возможными состояниями (контакты замкнуты
РЕЖИМЫ РАБОТЫ КОНТАКТОВ
ДИНАМИЧЕСКИЕ РЕЖИМЫ
Работоспособность коммутирующих контактов характеризуется также процессами замыкания (включения)
РЕЖИМЫ РАБОТЫ КОНТАКТОВ
ДИНАМИЧЕСКИЕ РЕЖИМЫ
Работоспособность коммутирующих контактов характеризуется также процессами замыкания (включения)
МАТЕРИАЛЫ КОНТАКТОВ
Mатериалы контактов должны иметь характеристики:
высокие электрическую проводимость и
МАТЕРИАЛЫ КОНТАКТОВ
Mатериалы контактов должны иметь характеристики:
высокие электрическую проводимость и
ЭЛЕКТРИЧЕСКАЯ ДУГА И ДУГОГАШЕНИЕ
74
Электрическая дуга является одним из видов газового разряда
ЭЛЕКТРИЧЕСКАЯ ДУГА И ДУГОГАШЕНИЕ
74
Электрическая дуга является одним из видов газового разряда
ФИЗИЧЕСКИЕ ПРОЦЕССЫ В ЭЛЕКТРИЧЕСКОЙ ДУГЕ
область
столба
дуги
околокатодная
область
околоанодная
область
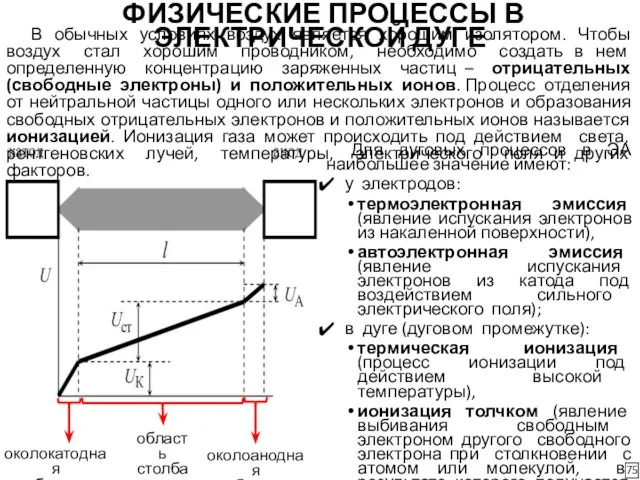
Для дуговых процессов в
ФИЗИЧЕСКИЕ ПРОЦЕССЫ В ЭЛЕКТРИЧЕСКОЙ ДУГЕ
область
столба
дуги
околокатодная
область
околоанодная
область
Для дуговых процессов в
ФИЗИЧЕСКИЕ ПРОЦЕССЫ В ЭЛЕКТРИЧЕСКОЙ ДУГЕ
Катодная область имеет основное значение в
ФИЗИЧЕСКИЕ ПРОЦЕССЫ В ЭЛЕКТРИЧЕСКОЙ ДУГЕ
Катодная область имеет основное значение в
ФИЗИЧЕСКИЕ ПРОЦЕССЫ В ЭЛЕКТРИЧЕСКОЙ ДУГЕ
77
В столбе дуги протекают также процессы
ФИЗИЧЕСКИЕ ПРОЦЕССЫ В ЭЛЕКТРИЧЕСКОЙ ДУГЕ
77
В столбе дуги протекают также процессы
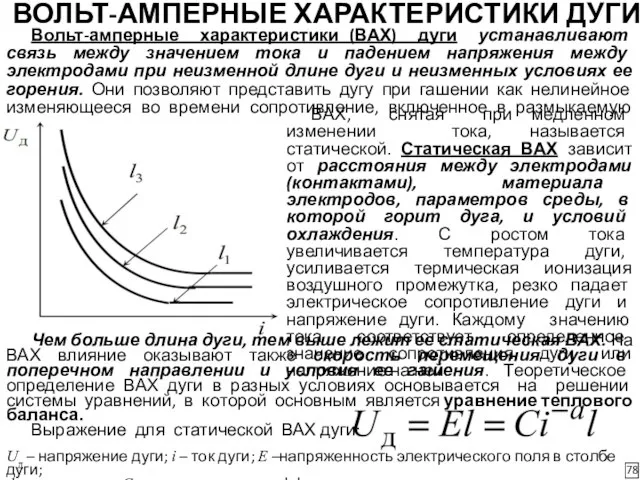
ВОЛЬТ-АМПЕРНЫЕ ХАРАКТЕРИСТИКИ ДУГИ
Вольт-амперные характеристики (ВАХ) дуги устанавливают связь между значением
ВОЛЬТ-АМПЕРНЫЕ ХАРАКТЕРИСТИКИ ДУГИ
Вольт-амперные характеристики (ВАХ) дуги устанавливают связь между значением
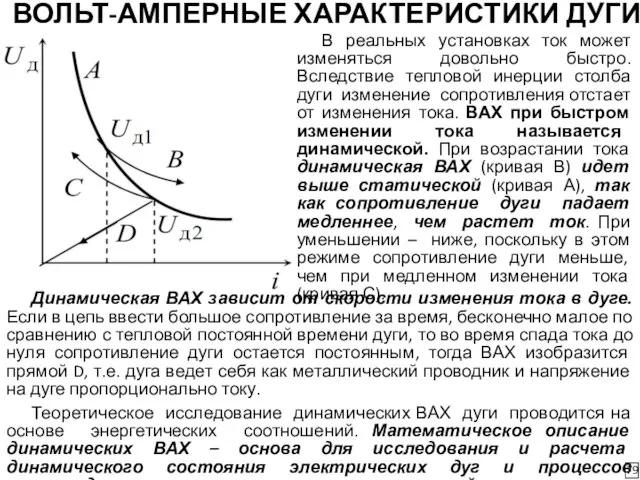
ВОЛЬТ-АМПЕРНЫЕ ХАРАКТЕРИСТИКИ ДУГИ
79
В реальных установках ток может изменяться довольно быстро.
ВОЛЬТ-АМПЕРНЫЕ ХАРАКТЕРИСТИКИ ДУГИ
79
В реальных установках ток может изменяться довольно быстро.
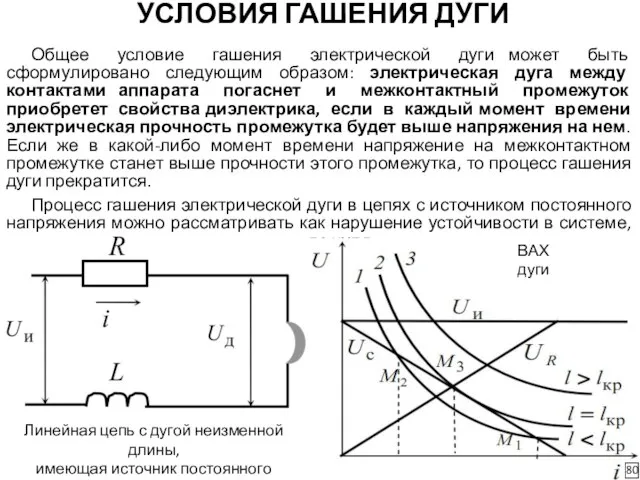
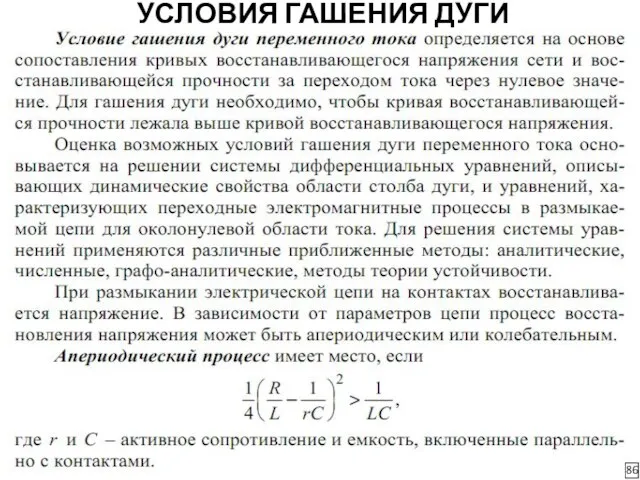
УСЛОВИЯ ГАШЕНИЯ ДУГИ
Общее условие гашения электрической дуги может быть сформулировано
УСЛОВИЯ ГАШЕНИЯ ДУГИ
Общее условие гашения электрической дуги может быть сформулировано
УСЛОВИЯ ГАШЕНИЯ ДУГИ
81
На ВАХ дуги
УСЛОВИЯ ГАШЕНИЯ ДУГИ
81
На ВАХ дуги
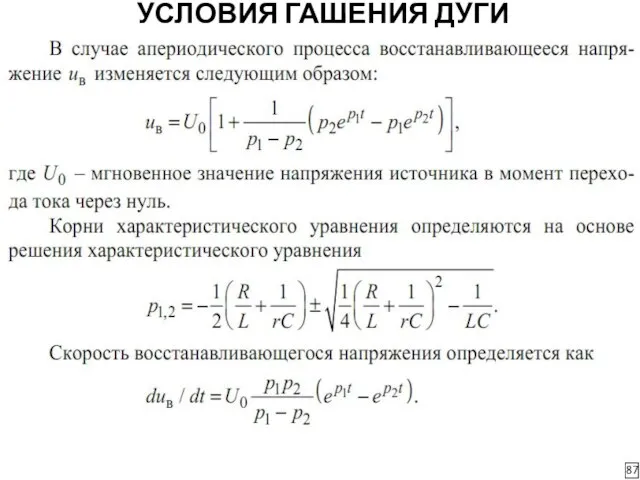
УСЛОВИЯ ГАШЕНИЯ ДУГИ
82
УСЛОВИЯ ГАШЕНИЯ ДУГИ
82
ВАХ
УСЛОВИЯ ГАШЕНИЯ ДУГИ
83
ВАХ
УСЛОВИЯ ГАШЕНИЯ ДУГИ
83
УСЛОВИЯ ГАШЕНИЯ ДУГИ
84
УСЛОВИЯ ГАШЕНИЯ ДУГИ
84
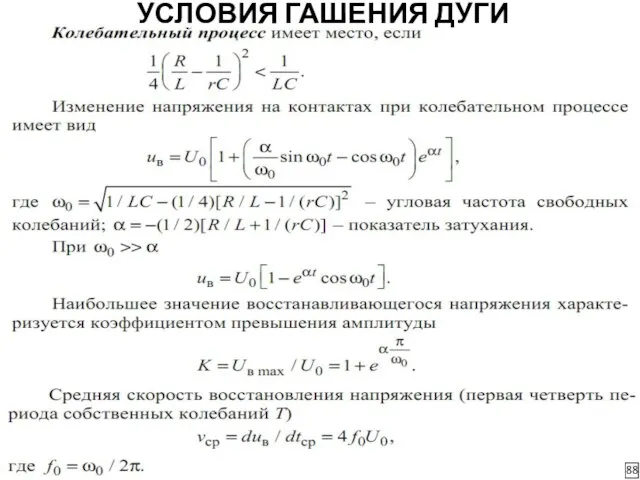
УСЛОВИЯ ГАШЕНИЯ ДУГИ
85
УСЛОВИЯ ГАШЕНИЯ ДУГИ
85
УСЛОВИЯ ГАШЕНИЯ ДУГИ
86
УСЛОВИЯ ГАШЕНИЯ ДУГИ
86
УСЛОВИЯ ГАШЕНИЯ ДУГИ
87
УСЛОВИЯ ГАШЕНИЯ ДУГИ
87
88
УСЛОВИЯ ГАШЕНИЯ ДУГИ
88
УСЛОВИЯ ГАШЕНИЯ ДУГИ
89
СПОСОБЫ ГАШЕНИЯ ДУГИ.
ДУГОГАСИТЕЛЬНЫЕ УСТРОЙСТВА
89
СПОСОБЫ ГАШЕНИЯ ДУГИ.
ДУГОГАСИТЕЛЬНЫЕ УСТРОЙСТВА

СПОСОБЫ ГАШЕНИЯ ДУГИ. ДУГОГАСИТЕЛЬНЫЕ УСТРОЙСТВА НИЗКОГО НАПРЯЖЕНИЯ
Простейший способ гашения
СПОСОБЫ ГАШЕНИЯ ДУГИ. ДУГОГАСИТЕЛЬНЫЕ УСТРОЙСТВА НИЗКОГО НАПРЯЖЕНИЯ
Простейший способ гашения

СПОСОБЫ ГАШЕНИЯ ДУГИ. ДУГОГАСИТЕЛЬНЫЕ УСТРОЙСТВА ВЫСОКОГО НАПРЯЖЕНИЯ
При гашении дуги в
СПОСОБЫ ГАШЕНИЯ ДУГИ. ДУГОГАСИТЕЛЬНЫЕ УСТРОЙСТВА ВЫСОКОГО НАПРЯЖЕНИЯ
При гашении дуги в
ЭЛЕКТРИЧЕСКИЕ АППАРАТЫ НИЗКОГО НАПРЯЖЕНИЯ
92
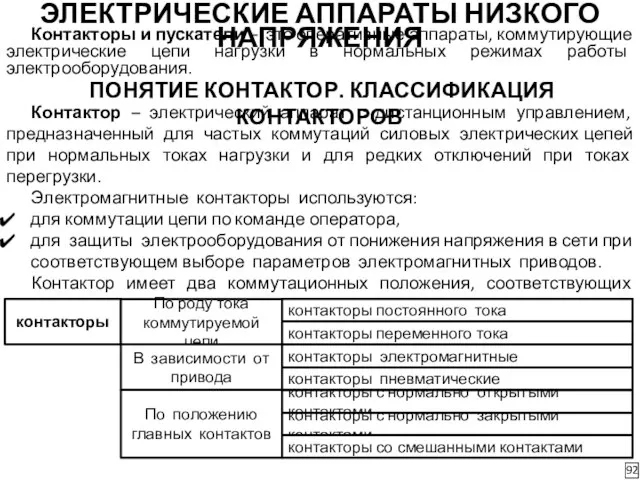
Контакторы и пускатели – это оперативные аппараты,
ЭЛЕКТРИЧЕСКИЕ АППАРАТЫ НИЗКОГО НАПРЯЖЕНИЯ
92
Контакторы и пускатели – это оперативные аппараты,
93
ОБЩИЕ СВЕДЕНИЯ О КОНТАКТОРАХ.
Основные технические данные контакторов
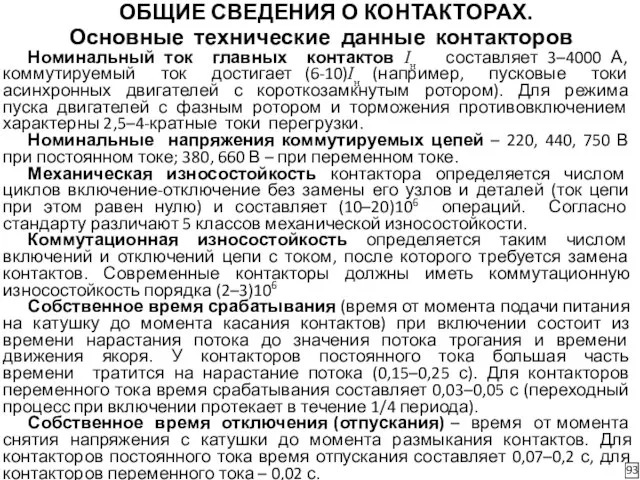
Номинальный ток главных
93
ОБЩИЕ СВЕДЕНИЯ О КОНТАКТОРАХ.
Основные технические данные контакторов
Номинальный ток главных
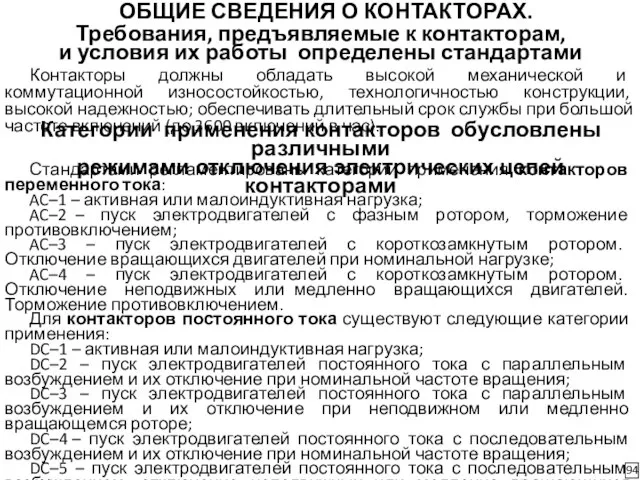
Требования, предъявляемые к контакторам,
и условия их работы определены стандартами
ОБЩИЕ СВЕДЕНИЯ
Требования, предъявляемые к контакторам,
и условия их работы определены стандартами
ОБЩИЕ СВЕДЕНИЯ
Условия отключения цепи контакторами во многом определяются отношением индуктивности L нагрузки
Условия отключения цепи контакторами во многом определяются отношением индуктивности L нагрузки

УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯ КОНТАКТОРА
96
Контактор имеет следующие основные узлы: контактную
УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯ КОНТАКТОРА
96
Контактор имеет следующие основные узлы: контактную
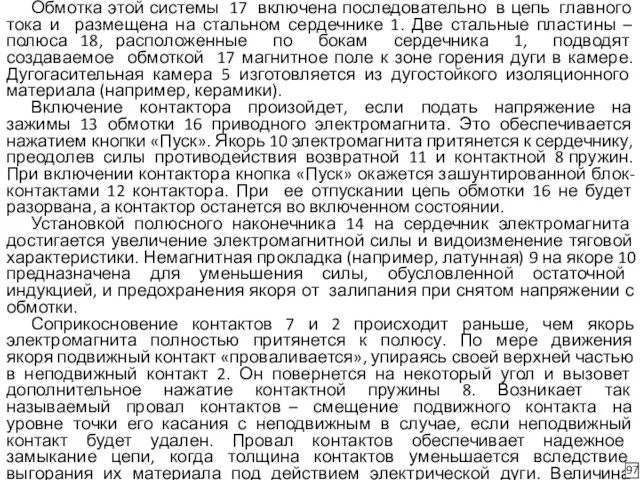
Обмотка этой системы 17 включена последовательно в цепь главного тока и
Обмотка этой системы 17 включена последовательно в цепь главного тока и
После соприкосновения контактов происходит перекатывание подвижного контакта 7 по неподвижному 2.
После соприкосновения контактов происходит перекатывание подвижного контакта 7 по неподвижному 2.
Число контактов у контакторов переменного тока может быть от 1 до
Число контактов у контакторов переменного тока может быть от 1 до

МАГНИТНЫЕ ПУСКАТЕЛИ
100
Магнитный пускатель – электрический аппарат, предназначенный для пуска, реверса
МАГНИТНЫЕ ПУСКАТЕЛИ
100
Магнитный пускатель – электрический аппарат, предназначенный для пуска, реверса
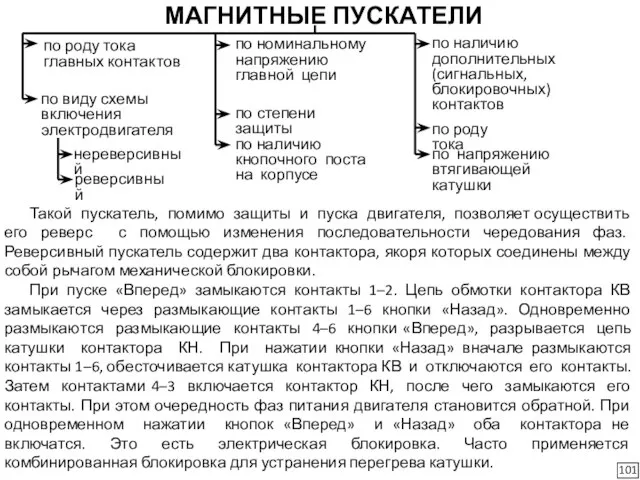
Такой пускатель, помимо защиты и пуска двигателя, позволяет осуществить его реверс
Такой пускатель, помимо защиты и пуска двигателя, позволяет осуществить его реверс
РЕЛЕ. ОБЩИЕ СВЕДЕНИЯ
102
Реле – электрический аппарат, в котором при плавном изменении
РЕЛЕ. ОБЩИЕ СВЕДЕНИЯ
102
Реле – электрический аппарат, в котором при плавном изменении
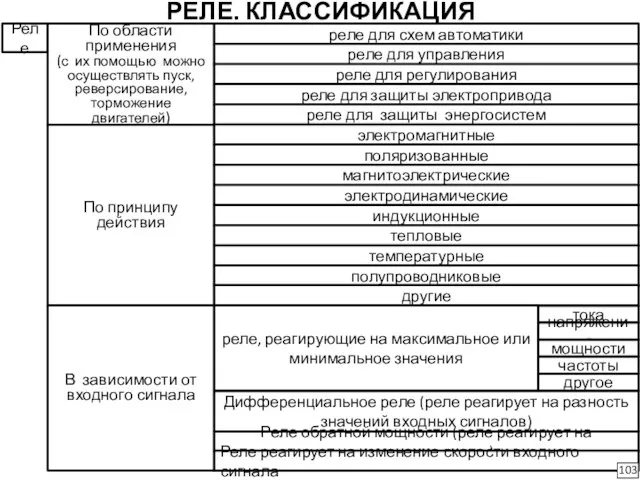
РЕЛЕ. КЛАССИФИКАЦИЯ
Реле
По области применения
(с их помощью можно осуществлять пуск, реверсирование, торможение
РЕЛЕ. КЛАССИФИКАЦИЯ
Реле
По области применения
(с их помощью можно осуществлять пуск, реверсирование, торможение
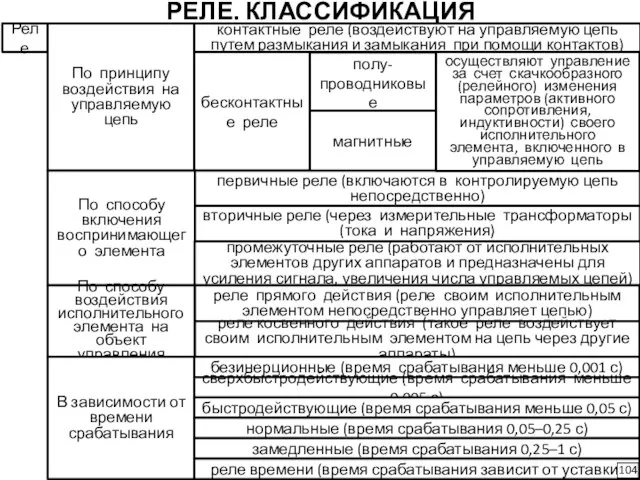
Реле
По принципу воздействия на управляемую цепь
контактные реле (воздействуют на управляемую цепь
Реле
По принципу воздействия на управляемую цепь
контактные реле (воздействуют на управляемую цепь
РЕЛЕ. ОСНОВНЫЕ ПАРАМЕТРЫ И ХАРАКТЕРИСТИКИ
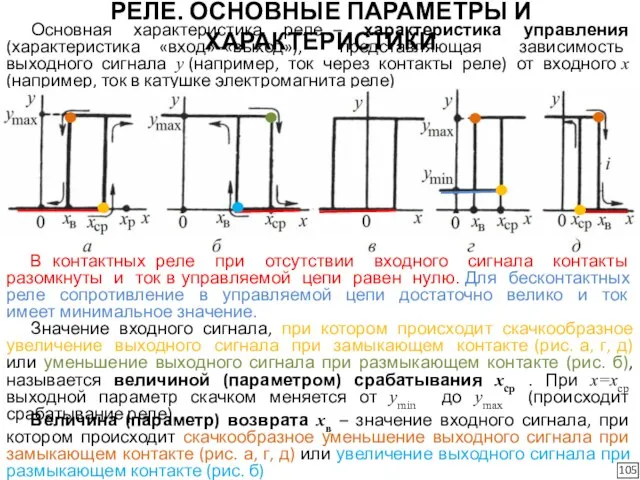
Основная характеристика реле – характеристика управления (характеристика
РЕЛЕ. ОСНОВНЫЕ ПАРАМЕТРЫ И ХАРАКТЕРИСТИКИ
Основная характеристика реле – характеристика управления (характеристика
РЕЛЕ. ОСНОВНЫЕ ПАРАМЕТРЫ И ХАРАКТЕРИСТИКИ
106
Время срабатывания – время с момента подачи
РЕЛЕ. ОСНОВНЫЕ ПАРАМЕТРЫ И ХАРАКТЕРИСТИКИ
106
Время срабатывания – время с момента подачи
РЕЛЕ. ПРЕДЪЯВЛЯЕМЫЕ ТРЕБОВАНИЯ
107
Требования, предъявляемые к реле, определяются их назначением.
К реле защиты
РЕЛЕ. ПРЕДЪЯВЛЯЕМЫЕ ТРЕБОВАНИЯ
107
Требования, предъявляемые к реле, определяются их назначением.
К реле защиты

ТИПЫ РЕЛЕ. ЭЛЕКТРОМАГНИТНЫЕ РЕЛЕ
108
Электромагнитные реле благодаря простоте конструкции и надежности
ТИПЫ РЕЛЕ. ЭЛЕКТРОМАГНИТНЫЕ РЕЛЕ
108
Электромагнитные реле благодаря простоте конструкции и надежности
ТИПЫ РЕЛЕ. ЭЛЕКТРОМАГНИТНЫЕ РЕЛЕ
109
Для контроля уменьшения входного сигнала используют минимальные
ТИПЫ РЕЛЕ. ЭЛЕКТРОМАГНИТНЫЕ РЕЛЕ
109
Для контроля уменьшения входного сигнала используют минимальные
ТИПЫ РЕЛЕ. ЭЛЕКТРОМАГНИТНЫЕ РЕЛЕ
110
Для реле защиты энергосистем и электроприводов, контролирующих
ТИПЫ РЕЛЕ. ЭЛЕКТРОМАГНИТНЫЕ РЕЛЕ
110
Для реле защиты энергосистем и электроприводов, контролирующих

ТИПЫ РЕЛЕ. ПОЛЯРИЗОВАННЫЕ РЕЛЕ
111
Последовательная магнитная цепь применяется редко из-за недостатков:
ТИПЫ РЕЛЕ. ПОЛЯРИЗОВАННЫЕ РЕЛЕ
111
Последовательная магнитная цепь применяется редко из-за недостатков:
112
При двухпозиционном исполнении с преобладанием, при отсутствии тока в обмотке, якорь
112
При двухпозиционном исполнении с преобладанием, при отсутствии тока в обмотке, якорь
ТИПЫ РЕЛЕ. РЕЛЕ ВРЕМЕНИ
Реле времени служат для создания выдержки времени
ТИПЫ РЕЛЕ. РЕЛЕ ВРЕМЕНИ
Реле времени служат для создания выдержки времени
В реле времени с электромагнитным замедлением использован принцип электромагнитного замедления. В
В реле времени с электромагнитным замедлением использован принцип электромагнитного замедления. В
115
ТИПЫ РЕЛЕ. РЕЛЕ ВРЕМЕНИ
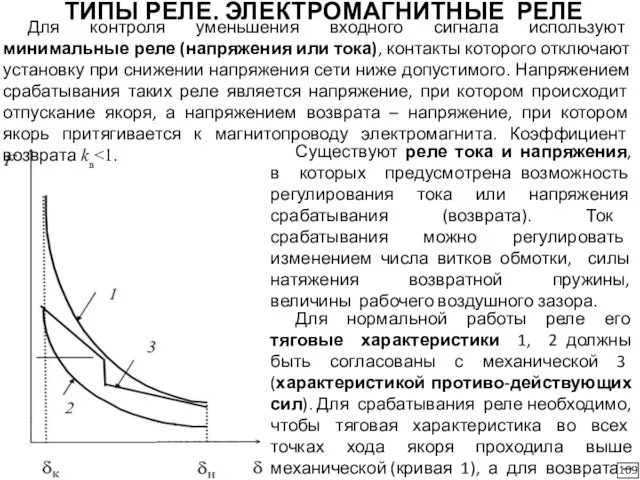
На рис. а изображена конструктивная схема реле
115
ТИПЫ РЕЛЕ. РЕЛЕ ВРЕМЕНИ
На рис. а изображена конструктивная схема реле
У реальных магнитных материалов после отключения намагничивающей обмотки поток спадает до
У реальных магнитных материалов после отключения намагничивающей обмотки поток спадает до
117
ТИПЫ РЕЛЕ. РЕЛЕ ВРЕМЕНИ
В реле с пневматическим замедлением и анкерным
117
ТИПЫ РЕЛЕ. РЕЛЕ ВРЕМЕНИ
В реле с пневматическим замедлением и анкерным

ТИПЫ РЕЛЕ. ГЕРКОНОВЫЕ РЕЛЕ
Герконовые реле – это реле с герметичными
ТИПЫ РЕЛЕ. ГЕРКОНОВЫЕ РЕЛЕ
Герконовые реле – это реле с герметичными
ТИПЫ РЕЛЕ. ГЕРКОНОВЫЕ РЕЛЕ
Герконы имеют преимущества:
благодаря полной герметизации могут
ТИПЫ РЕЛЕ. ГЕРКОНОВЫЕ РЕЛЕ
Герконы имеют преимущества:
благодаря полной герметизации могут
ТИПЫ РЕЛЕ. ТЕПЛОВЫЕ РЕЛЕ
120
Тепловые реле предназначены для защиты электроустановок, главным
ТИПЫ РЕЛЕ. ТЕПЛОВЫЕ РЕЛЕ
120
Тепловые реле предназначены для защиты электроустановок, главным
ТИПЫ РЕЛЕ. ТЕПЛОВЫЕ РЕЛЕ
121
Конструктивная схема реле (рис. а): 1 и
ТИПЫ РЕЛЕ. ТЕПЛОВЫЕ РЕЛЕ
121
Конструктивная схема реле (рис. а): 1 и

ТИПЫ РЕЛЕ. ТЕПЛОВЫЕ РЕЛЕ
122
Существенным недостатком тепловых реле является зависимость времени
ТИПЫ РЕЛЕ. ТЕПЛОВЫЕ РЕЛЕ
122
Существенным недостатком тепловых реле является зависимость времени
ДАТЧИКИ. ПОНЯТИЕ. КЛАССИФИКАЦИЯ
123
Датчики (первичные преобразователи) – аппараты, предназначенные для контроля и
ДАТЧИКИ. ПОНЯТИЕ. КЛАССИФИКАЦИЯ
123
Датчики (первичные преобразователи) – аппараты, предназначенные для контроля и
ДАТЧИКИ. ХАРАКТЕРИСТИКИ И ПАРАМЕТРЫ
Статическая характеристика датчика.
Номинальная характеристика
Паспортная (расчетная, номинальная) и реальная
ДАТЧИКИ. ХАРАКТЕРИСТИКИ И ПАРАМЕТРЫ
Статическая характеристика датчика.
Номинальная характеристика
Паспортная (расчетная, номинальная) и реальная
Чувствительность датчика представляет отношение приращений выходной и входной величин. Для нелинейной
Чувствительность датчика представляет отношение приращений выходной и входной величин. Для нелинейной
ДАТЧИКИ. ПРЕДЪЯВЛЯЕМЫЕ ТРЕБОВАНИЯ
126
Высокая чувствительность.
Малая погрешность.
Необходимый диапазоном изменения входной величины.
Возможность согласования со
ДАТЧИКИ. ПРЕДЪЯВЛЯЕМЫЕ ТРЕБОВАНИЯ
126
Высокая чувствительность.
Малая погрешность.
Необходимый диапазоном изменения входной величины.
Возможность согласования со
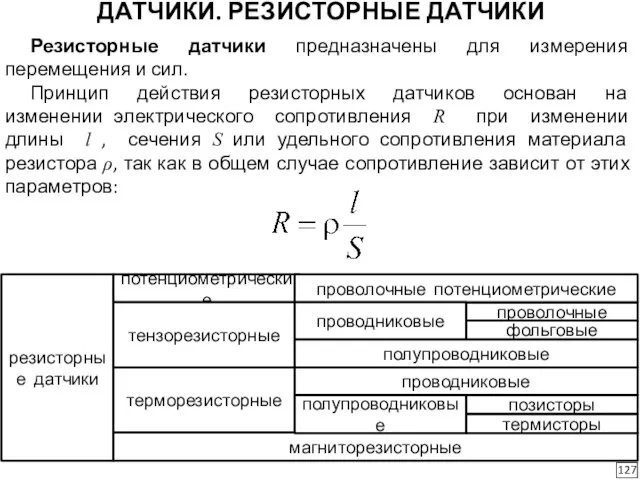
ДАТЧИКИ. РЕЗИСТОРНЫЕ ДАТЧИКИ
127
Резисторные датчики предназначены для измерения перемещения и сил.
Принцип
ДАТЧИКИ. РЕЗИСТОРНЫЕ ДАТЧИКИ
127
Резисторные датчики предназначены для измерения перемещения и сил.
Принцип

ДАТЧИКИ. ПОТЕНЦИОМЕТРИЧЕСКИЕ ДАТЧИКИ
128
Потенциометрические датчики предназначены для измерения угловых или линейных перемещений.
ДАТЧИКИ. ПОТЕНЦИОМЕТРИЧЕСКИЕ ДАТЧИКИ
128
Потенциометрические датчики предназначены для измерения угловых или линейных перемещений.
ДАТЧИКИ. ПОТЕНЦИОМЕТРИЧЕСКИЕ ДАТЧИКИ
129
Для обмоточного провода используются сплавы с высоким удельным сопротивлением
ДАТЧИКИ. ПОТЕНЦИОМЕТРИЧЕСКИЕ ДАТЧИКИ
129
Для обмоточного провода используются сплавы с высоким удельным сопротивлением
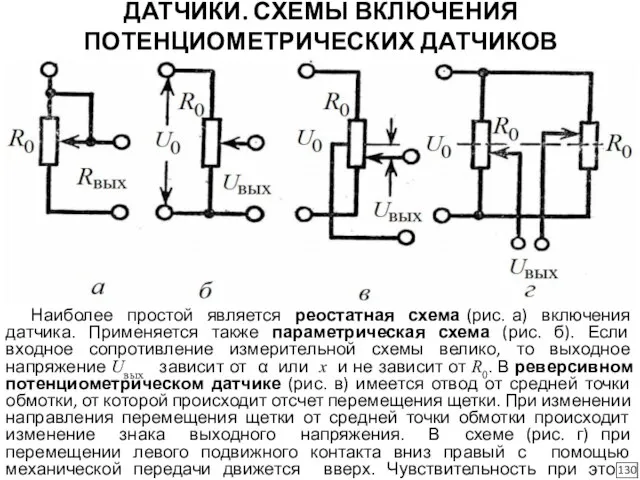
ДАТЧИКИ. СХЕМЫ ВКЛЮЧЕНИЯ
ПОТЕНЦИОМЕТРИЧЕСКИХ ДАТЧИКОВ
Наиболее простой является реостатная схема (рис. а) включения
ДАТЧИКИ. СХЕМЫ ВКЛЮЧЕНИЯ
ПОТЕНЦИОМЕТРИЧЕСКИХ ДАТЧИКОВ
Наиболее простой является реостатная схема (рис. а) включения
ДАТЧИКИ. ТЕНЗОРЕЗИСТОРНЫЕ ДАТЧИКИ
131
Тензорезисторные датчики предназначены для измерения деформаций, возникающих под действием
ДАТЧИКИ. ТЕНЗОРЕЗИСТОРНЫЕ ДАТЧИКИ
131
Тензорезисторные датчики предназначены для измерения деформаций, возникающих под действием
ДАТЧИКИ. ТЕНЗОРЕЗИСТОРНЫЕ ДАТЧИКИ
132
Относительное изменение сопротивления проводника
Тензоэффект различных материалов характеризуется
коэффициентом тензочувствительности
Характеристика управления
ДАТЧИКИ. ТЕНЗОРЕЗИСТОРНЫЕ ДАТЧИКИ
132
Относительное изменение сопротивления проводника
Тензоэффект различных материалов характеризуется
коэффициентом тензочувствительности
Характеристика управления
ДАТЧИКИ. ТЕНЗОРЕЗИСТОРНЫЕ ДАТЧИКИ
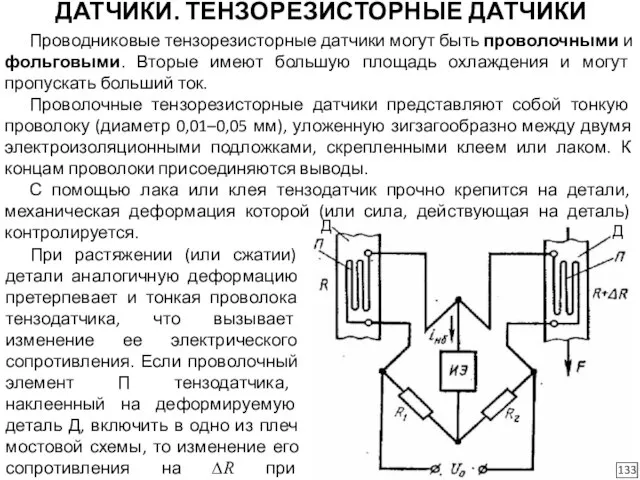
Проводниковые тензорезисторные датчики могут быть проволочными и фольговыми. Вторые
ДАТЧИКИ. ТЕНЗОРЕЗИСТОРНЫЕ ДАТЧИКИ
Проводниковые тензорезисторные датчики могут быть проволочными и фольговыми. Вторые
детали силой F вызовет разбаланс в схеме моста. Измерительный элемент ИЭ
детали силой F вызовет разбаланс в схеме моста. Измерительный элемент ИЭ
ДАТЧИКИ. ТЕРМОРЕЗИСТОРНЫЕ ДАТЧИКИ
Терморезисторные датчики предназначены для измерения температуры деталей машин, приборов,
ДАТЧИКИ. ТЕРМОРЕЗИСТОРНЫЕ ДАТЧИКИ
Терморезисторные датчики предназначены для измерения температуры деталей машин, приборов,
ДАТЧИКИ. ПОЛУПРОВОДНИКОВЫЕ
ТЕРМОРЕЗИСТОРНЫЕ ДАТЧИКИ
136
Как элементы различных датчиков широкое распространение получили полупроводниковые термосопротивления
ДАТЧИКИ. ПОЛУПРОВОДНИКОВЫЕ
ТЕРМОРЕЗИСТОРНЫЕ ДАТЧИКИ
136
Как элементы различных датчиков широкое распространение получили полупроводниковые термосопротивления
ДАТЧИКИ. ПОЛУПРОВОДНИКОВЫЕ
ТЕРМОРЕЗИСТОРНЫЕ ДАТЧИКИ
137
Конструктивно термисторы представляют из себя тело дисковой, шаровой или
ДАТЧИКИ. ПОЛУПРОВОДНИКОВЫЕ
ТЕРМОРЕЗИСТОРНЫЕ ДАТЧИКИ
137
Конструктивно термисторы представляют из себя тело дисковой, шаровой или
Термисторы находят применение для ограничения пусковых токов электродвигателей в качестве датчиков-ограничителей
Термисторы находят применение для ограничения пусковых токов электродвигателей в качестве датчиков-ограничителей
ДАТЧИКИ. МАГНИТОРЕЗИСТОРНЫЕ ДАТЧИКИ
139
Магниторезисторные датчики являются менее распространенными резистивными датчиками.
Их действие
ДАТЧИКИ. МАГНИТОРЕЗИСТОРНЫЕ ДАТЧИКИ
139
Магниторезисторные датчики являются менее распространенными резистивными датчиками.
Их действие
ДАТЧИКИ. МАГНИТОРЕЗИСТОРНЫЕ ДАТЧИКИ
140
В интервале малых индукций характеристика нелинейна, а при больших
ДАТЧИКИ. МАГНИТОРЕЗИСТОРНЫЕ ДАТЧИКИ
140
В интервале малых индукций характеристика нелинейна, а при больших
ДАТЧИКИ. ЕМКОСТНЫЕ ДАТЧИКИ
141
Емкостные датчики служат для измерения перемещений, размеров деталей, уровня
ДАТЧИКИ. ЕМКОСТНЫЕ ДАТЧИКИ
141
Емкостные датчики служат для измерения перемещений, размеров деталей, уровня
ДАТЧИКИ. ЕМКОСТНЫЕ ДАТЧИКИ
142
Устройство емкостных датчиков и графики изменения их емкости при
ДАТЧИКИ. ЕМКОСТНЫЕ ДАТЧИКИ
142
Устройство емкостных датчиков и графики изменения их емкости при
ДАТЧИКИ. ЕМКОСТНЫЕ ДАТЧИКИ
143
Датчики с изменением величины воздушного зазора и площади перекрытия
ДАТЧИКИ. ЕМКОСТНЫЕ ДАТЧИКИ
143
Датчики с изменением величины воздушного зазора и площади перекрытия
ДАТЧИКИ. ЕМКОСТНЫЕ ДАТЧИКИ
144
Пример конструкции, использованной для построения датчика угловых перемещений. При
ДАТЧИКИ. ЕМКОСТНЫЕ ДАТЧИКИ
144
Пример конструкции, использованной для построения датчика угловых перемещений. При
ДАТЧИКИ. ИНДУКТИВНЫЕ ДАТЧИКИ
Индуктивные датчики служат для измерения перемещений и сил. Принцип
ДАТЧИКИ. ИНДУКТИВНЫЕ ДАТЧИКИ
Индуктивные датчики служат для измерения перемещений и сил. Принцип

ДАТЧИКИ. ИНДУКТИВНЫЕ ДАТЧИКИ
146
Выходное напряжение датчика (индуктивное сопротивление обмотки много больше активного)
ДАТЧИКИ. ИНДУКТИВНЫЕ ДАТЧИКИ
146
Выходное напряжение датчика (индуктивное сопротивление обмотки много больше активного)

ДАТЧИКИ. ИНДУКТИВНЫЕ ДАТЧИКИ
147
Более широкое применение получили реверсивные датчики, имеющие лучшие характеристики.
ДАТЧИКИ. ИНДУКТИВНЫЕ ДАТЧИКИ
147
Более широкое применение получили реверсивные датчики, имеющие лучшие характеристики.
ДАТЧИКИ. ИНДУКТИВНЫЕ ДАТЧИКИ
148
Индуктивные магнитоупругие датчики предназначены для измерения значительных механических сил.
ДАТЧИКИ. ИНДУКТИВНЫЕ ДАТЧИКИ
148
Индуктивные магнитоупругие датчики предназначены для измерения значительных механических сил.

ДАТЧИКИ. ТРАНСФОРМАТОРНЫЕ ДАТЧИКИ
149
Трансформаторные датчики применяются для измерения механических перемещений и сил.
ДАТЧИКИ. ТРАНСФОРМАТОРНЫЕ ДАТЧИКИ
149
Трансформаторные датчики применяются для измерения механических перемещений и сил.

ДАТЧИКИ. ТРАНСФОРМАТОРНЫЕ ДАТЧИКИ
150
Трансформаторные датчики с перемещающимся якорем не имеют подвижной обмотки.
ДАТЧИКИ. ТРАНСФОРМАТОРНЫЕ ДАТЧИКИ
150
Трансформаторные датчики с перемещающимся якорем не имеют подвижной обмотки.
ДАТЧИКИ. ТРАНСФОРМАТОРНЫЕ ДАТЧИКИ
151
Магнитная система датчика со вторичной обмоткой, перемещающейся вдоль магнитопровода,
ДАТЧИКИ. ТРАНСФОРМАТОРНЫЕ ДАТЧИКИ
151
Магнитная система датчика со вторичной обмоткой, перемещающейся вдоль магнитопровода,
ДАТЧИКИ. ТРАНСФОРМАТОРНЫЕ ДАТЧИКИ
152
Рассмотренные трансформаторные датчики с перемещающейся обмоткой имеют сравнительно высокую
ДАТЧИКИ. ТРАНСФОРМАТОРНЫЕ ДАТЧИКИ
152
Рассмотренные трансформаторные датчики с перемещающейся обмоткой имеют сравнительно высокую
ДАТЧИКИ. ГЕНЕРАТОРНЫЕ ДАТЧИКИ
153
Индукционные датчики предназначены для измерения линейных и угловых
ДАТЧИКИ. ГЕНЕРАТОРНЫЕ ДАТЧИКИ
153
Индукционные датчики предназначены для измерения линейных и угловых
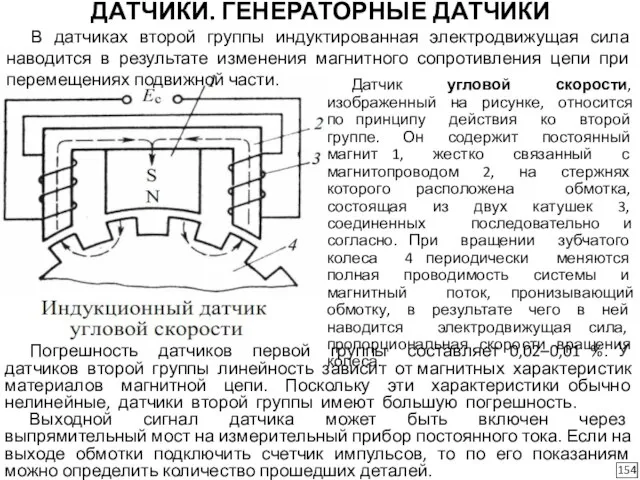
В датчиках второй группы индуктированная электродвижущая сила наводится в результате изменения
В датчиках второй группы индуктированная электродвижущая сила наводится в результате изменения
ДАТЧИКИ. ГЕНЕРАТОРНЫЕ ДАТЧИКИ
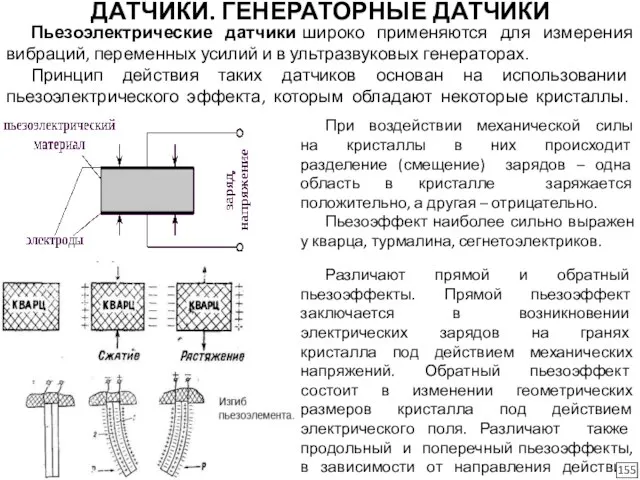
Различают прямой и обратный пьезоэффекты. Прямой пьезоэффект заключается
ДАТЧИКИ. ГЕНЕРАТОРНЫЕ ДАТЧИКИ
Различают прямой и обратный пьезоэффекты. Прямой пьезоэффект заключается

Пьезоэлектрические датчики непригодны для контроля постоянных или медленно изменяющихся усилий, так
Пьезоэлектрические датчики непригодны для контроля постоянных или медленно изменяющихся усилий, так
ДАТЧИКИ. ТЕРМОЭЛЕКТРИЧЕСКИЕ ДАТЧИКИ
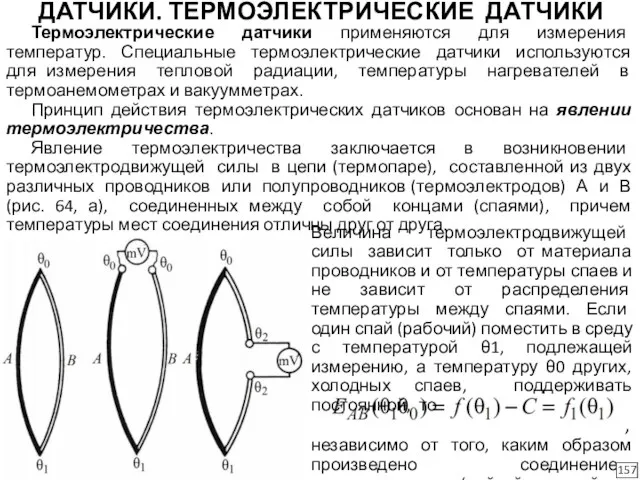
Термоэлектрические датчики применяются для измерения температур. Специальные термоэлектрические датчики
ДАТЧИКИ. ТЕРМОЭЛЕКТРИЧЕСКИЕ ДАТЧИКИ
Термоэлектрические датчики применяются для измерения температур. Специальные термоэлектрические датчики
ДАТЧИКИ. ТЕРМОЭЛЕКТРИЧЕСКИЕ ДАТЧИКИ
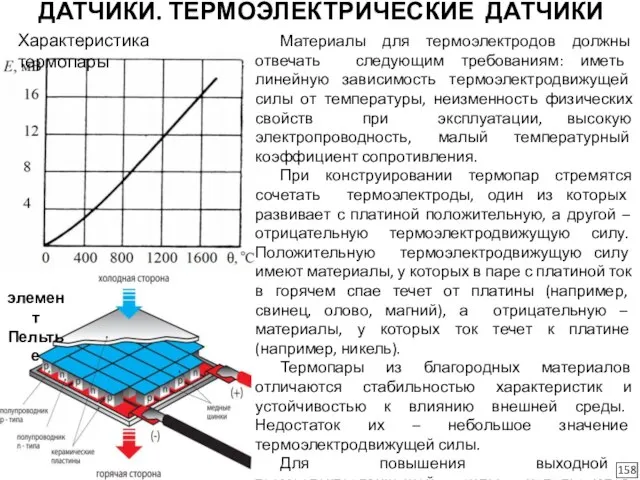
158
Характеристика термопары
Материалы для термоэлектродов должны отвечать следующим требованиям: иметь
ДАТЧИКИ. ТЕРМОЭЛЕКТРИЧЕСКИЕ ДАТЧИКИ
158
Характеристика термопары
Материалы для термоэлектродов должны отвечать следующим требованиям: иметь

ДАТЧИКИ. ДАТЧИКИ ХОЛЛА
Датчики Холла используются для измерения магнитных, электрических и неэлектрических
ДАТЧИКИ. ДАТЧИКИ ХОЛЛА
Датчики Холла используются для измерения магнитных, электрических и неэлектрических
 Любимые актёры
Любимые актёры Каин и Авель
Каин и Авель ghbdth
ghbdth Reklamnaya_Kampania
Reklamnaya_Kampania 20141221_kreshchenie_rusi_-_chast_1
20141221_kreshchenie_rusi_-_chast_1 Доклад инженера-энергетика Бузулукского ЛПУ МГ ОАО Газпром Траснгаз Екатеринбург
Доклад инженера-энергетика Бузулукского ЛПУ МГ ОАО Газпром Траснгаз Екатеринбург Игра-тренажер Веселый счет
Игра-тренажер Веселый счет 20180904_shmo_dlya_uchitelya
20180904_shmo_dlya_uchitelya 8. Оценивание случайных погрешностей измерения
8. Оценивание случайных погрешностей измерения Конструктивные особенности ДГУ FG Wilson
Конструктивные особенности ДГУ FG Wilson ДНЦ
ДНЦ Загадки русского языка
Загадки русского языка ВПР 5 КЛАСС №7.2
ВПР 5 КЛАСС №7.2 Плод духа
Плод духа Разработчик киберпротезов и имплантов
Разработчик киберпротезов и имплантов Шаблон описания потерь_к заданию 1
Шаблон описания потерь_к заданию 1 Степень с натуральным показателем
Степень с натуральным показателем Конструкция внутреннего водопровода
Конструкция внутреннего водопровода ДПИ Декоративно-прикладное искусство
ДПИ Декоративно-прикладное искусство Подготовка и участие в празднике к Дню Земли
Подготовка и участие в празднике к Дню Земли выступление кахут
выступление кахут Комплексна оцінка працездатності електромагнітних бензинових форсунок
Комплексна оцінка працездатності електромагнітних бензинових форсунок My teaching Background
My teaching Background Ресурсы и факторы производства
Ресурсы и факторы производства Структура современного производства
Структура современного производства Учение ислама
Учение ислама Концепция развития корпуса Станкомонтаж
Концепция развития корпуса Станкомонтаж Плавучие краны
Плавучие краны