- Электрический привод. Механика электропривода. Тема 1.5

Содержание
- 2. 80. Структурная схема электропривода. Основные типы электропривода
- 3. Электрическим приводом (ЭП) называется электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенная для
- 4. ЭП включает в себя ряд электротехнических, электронных и механических устройств, в результате чего он представляет собой
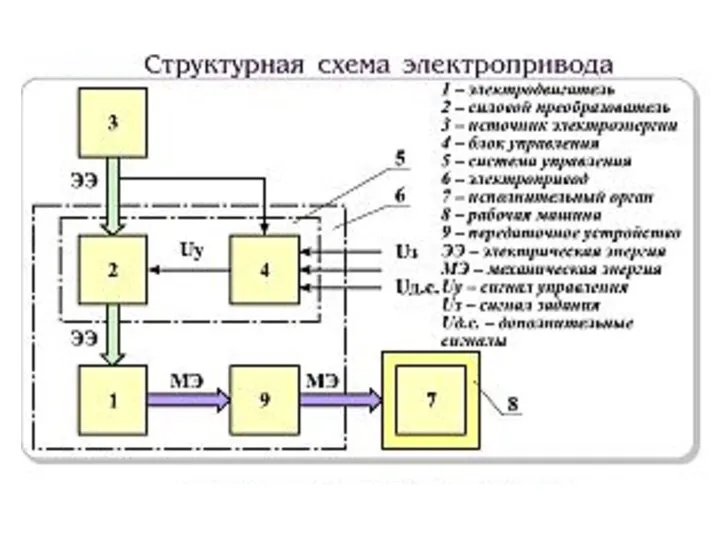
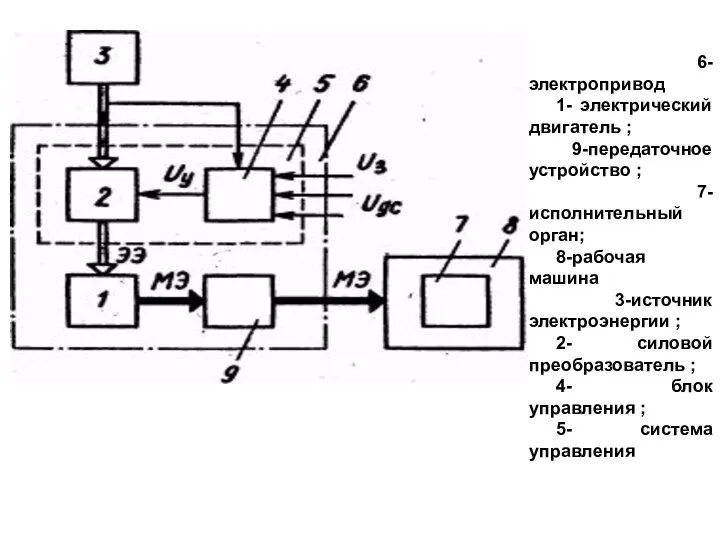
- 6. 6- электропривод 1- электрический двигатель ; 9-передаточное устройство ; 7-исполнительный орган; 8-рабочая машина 3-источник электроэнергии ;
- 7. Структурная схема электрического привода Элементами электропривода 6 являются: электрический двигатель 1; передаточное устройство 9; исполнительный орган
- 9. В электрическую часть силового канала входят устройства ЭП, передающие электрическую энергию от источника питания (шин промышленной
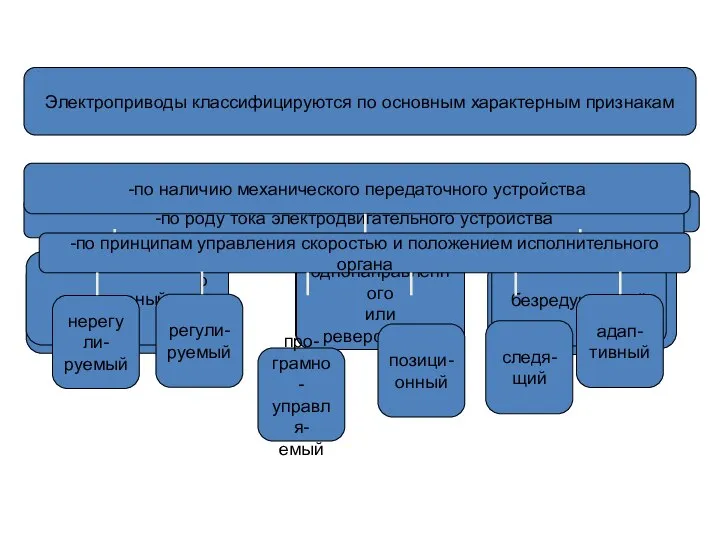
- 10. Электроприводы классифицируются по основным характерным признакам
- 11. По способу передачи механической энергии исполнительному органу электроприводы подразделяют на групповой, индивидуальный и взаимосвязанный. Групповой электропривод
- 12. По принципам управления скоростью и положением исполнительного органа различают нерегулируемый, регулируемый, позиционный, следящий, программно-управляемый, адаптивный. Нерегулируемый
- 13. Следящий – привод, в котором исполнительный орган воспроизводит перемещение, произвольно задаваемое управляющим органом. Программно-управляемый – электропривод,
- 15. 81.Основное уравнение системы. Момент инерции вращающегося тела
- 16. Электропривод. Часть 1 В механическом движении участвуют подвижная часть электродвигателя (ротор или якорь), элементы механического передаточного
- 17. где ΣM - совокупность моментов, действующих на элемент; J - момент инерции элемента; t - время.
- 18. Уравнения движения по своему характеру являются дифференциальными, поскольку содержат производные скорости, массы и момента инерции. В
- 19. Если dω/dt =0, то Другими словами, элемент будет двигаться с неизменной скоростью или находиться в состоянии
- 20. При ΣM >0 элемент будет двигаться с ускорением. При ΣM В общем случае моменты двигателя М
- 21. Правило, по которому определяются эти знаки, следующее: если направление действия момента совпадает с направлением скорости, то
- 22. Момент инерции — это мера инертных свойств твердого тела при вращательном движении, зависящая от распределения массы
- 23. Момент инерции бесконечно плоского диска радиуса R относительно оси, перпендикулярной плоскости диска: Момент инерции шара радиуса
- 24. 82. Механические характеристики двигателей и механизмов. Основное уравнение динамики электропривода
- 25. Моменты М (двигателя) и Мм Мс(рабочей машины) могут зависеть от времени, от положения, от угловой скорости
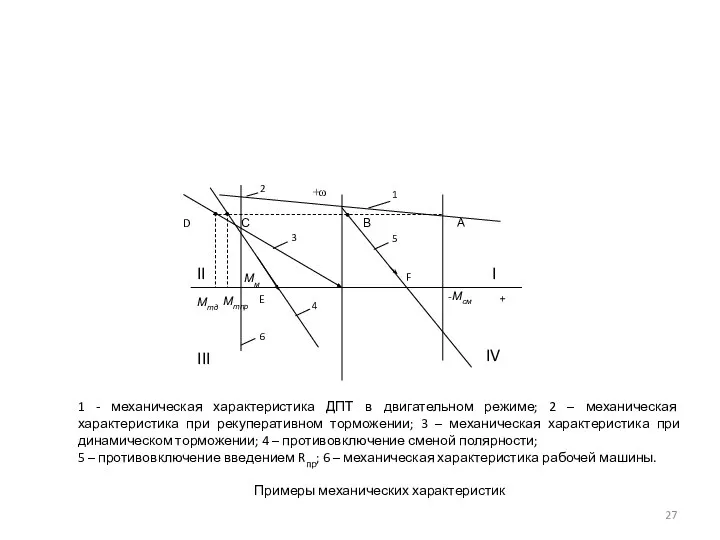
- 26. Поскольку как моменты, так и скорость могут иметь различные знаки, механические характеристики могут располагаться в четырех
- 27. 2 1 6 5 3 4 +ω + А В С D E F 1 -
- 28. Моменты, направленные по движению (движущие), имеют знак, совпадающий со знаком скорости; моменты, направленные против движения (тормозящие),
- 29. Моменты принято делить на активные и реактивные (пассивные). Активные моменты могут быть как движущими, так и
- 30. Реактивные моменты - реакция на движение, они всегда направлены против движения, т.е. всегда тормозящие (момент от
- 31. Механические характеристики принято оценивать их жесткостью 1 – характеристика абсолютно жесткая β=∞; 2 – характеристика абсолютно
- 32. Абсолютно жесткая механическая характеристика свойственна синхронному электродвигателю; жесткая (с отрицательной жесткостью) - электродвигателю постоянного тока независимого
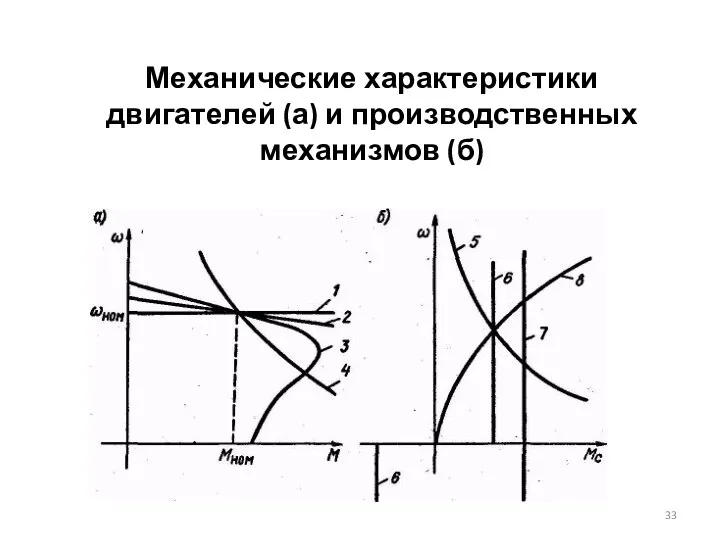
- 33. Механические характеристики двигателей (а) и производственных механизмов (б)
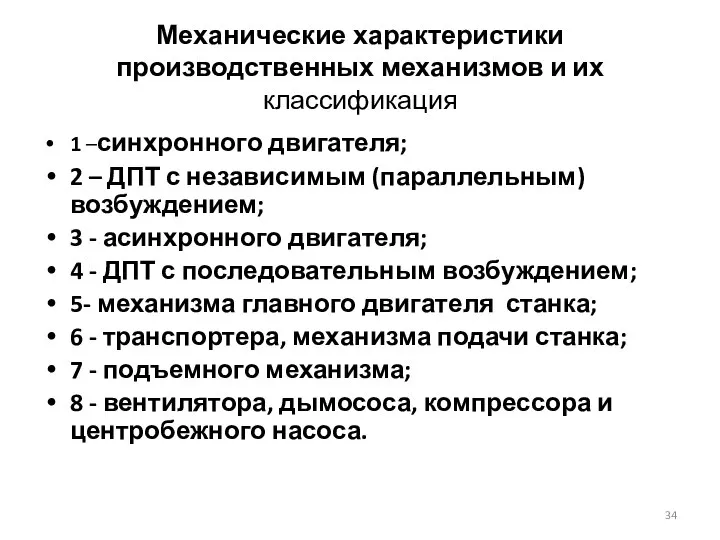
- 34. Механические характеристики производственных механизмов и их классификация 1 –синхронного двигателя; 2 – ДПТ с независимым (параллельным)
- 35. Механические характеристики двигателя и нагрузки, рассматриваемые совместно, позволяют определить координаты - скорость и моменты - в
- 36. Введенное понятие механических характеристик позволяет просто и удобно выполнить проверку условия установившегося движения. Для этого в
- 38. В зависимости от вида механических характеристик двигателя и исполнительного органа установившееся движение может быть устойчивым или
- 39. Проверка на устойчивость движения может быть выполнена аналитически, с использованием понятия жесткости характеристик. Движение будет устойчиво
- 40. Где β – жесткость механической характеристики двигателя, βс – жесткость механической характеристики механизма.
- 42. Рассмотрим способ определения устойчивости движения с помощью механических характеристик . Предположим, что по какой-то причине скорость
- 44. Скачать презентацию
80. Структурная схема электропривода. Основные типы электропривода
80. Структурная схема электропривода. Основные типы электропривода
Электрическим приводом (ЭП) называется электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного
Электрическим приводом (ЭП) называется электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного
ЭП включает в себя ряд электротехнических, электронных и механических устройств, в
ЭП включает в себя ряд электротехнических, электронных и механических устройств, в
6- электропривод
1- электрический двигатель ;
9-передаточное устройство ;
7-исполнительный
6- электропривод
1- электрический двигатель ;
9-передаточное устройство ;
7-исполнительный
Структурная схема электрического привода
Элементами электропривода 6 являются:
электрический двигатель 1;
передаточное
Структурная схема электрического привода
Элементами электропривода 6 являются:
электрический двигатель 1;
передаточное

В электрическую часть силового канала входят устройства ЭП, передающие электрическую
В электрическую часть силового канала входят устройства ЭП, передающие электрическую
Электроприводы классифицируются по основным характерным признакам
Электроприводы классифицируются по основным характерным признакам
По способу передачи механической энергии исполнительному органу электроприводы подразделяют на групповой,
По способу передачи механической энергии исполнительному органу электроприводы подразделяют на групповой,
По принципам управления скоростью и положением исполнительного органа различают нерегулируемый, регулируемый,
По принципам управления скоростью и положением исполнительного органа различают нерегулируемый, регулируемый,
Следящий – привод, в котором исполнительный орган воспроизводит перемещение, произвольно задаваемое
Следящий – привод, в котором исполнительный орган воспроизводит перемещение, произвольно задаваемое
81.Основное уравнение системы.
Момент инерции вращающегося тела
81.Основное уравнение системы.
Момент инерции вращающегося тела
Электропривод. Часть 1
В механическом движении участвуют подвижная часть электродвигателя (ротор или
Электропривод. Часть 1
В механическом движении участвуют подвижная часть электродвигателя (ротор или
где ΣM - совокупность моментов, действующих на элемент;
J - момент
где ΣM - совокупность моментов, действующих на элемент;
J - момент
Уравнения движения по своему характеру являются дифференциальными, поскольку содержат производные скорости,
Уравнения движения по своему характеру являются дифференциальными, поскольку содержат производные скорости,
Если dω/dt =0, то
Другими словами, элемент будет двигаться с неизменной скоростью
Если dω/dt =0, то
Другими словами, элемент будет двигаться с неизменной скоростью
При ΣM >0 элемент будет двигаться с ускорением.
При ΣM<0 -
При ΣM >0 элемент будет двигаться с ускорением.
При ΣM<0 -
Правило, по которому определяются эти знаки, следующее: если направление действия момента
Правило, по которому определяются эти знаки, следующее: если направление действия момента
Момент инерции — это мера инертных свойств твердого тела при вращательном движении,
Момент инерции — это мера инертных свойств твердого тела при вращательном движении,
Момент инерции бесконечно плоского диска радиуса R относительно оси, перпендикулярной плоскости
Момент инерции бесконечно плоского диска радиуса R относительно оси, перпендикулярной плоскости
82. Механические характеристики двигателей и механизмов.
Основное уравнение динамики электропривода
82. Механические характеристики двигателей и механизмов.
Основное уравнение динамики электропривода
Моменты М (двигателя) и Мм Мс(рабочей машины) могут зависеть от времени,
Моменты М (двигателя) и Мм Мс(рабочей машины) могут зависеть от времени,
Поскольку как моменты, так и скорость могут иметь различные знаки, механические
Поскольку как моменты, так и скорость могут иметь различные знаки, механические
2
1
6
5
3
4
+ω
+
А
В
С
D
E
F
1 - механическая характеристика ДПТ в двигательном режиме; 2 – механическая
2
1
6
5
3
4
+ω
+
А
В
С
D
E
F
1 - механическая характеристика ДПТ в двигательном режиме; 2 – механическая
Моменты, направленные по движению (движущие), имеют знак, совпадающий со знаком скорости;
моменты,
Моменты, направленные по движению (движущие), имеют знак, совпадающий со знаком скорости;
моменты,
Моменты принято делить на активные и
реактивные (пассивные).
Активные моменты могут
Моменты принято делить на активные и
реактивные (пассивные).
Активные моменты могут
Реактивные моменты - реакция на движение, они всегда направлены против движения,
Реактивные моменты - реакция на движение, они всегда направлены против движения,
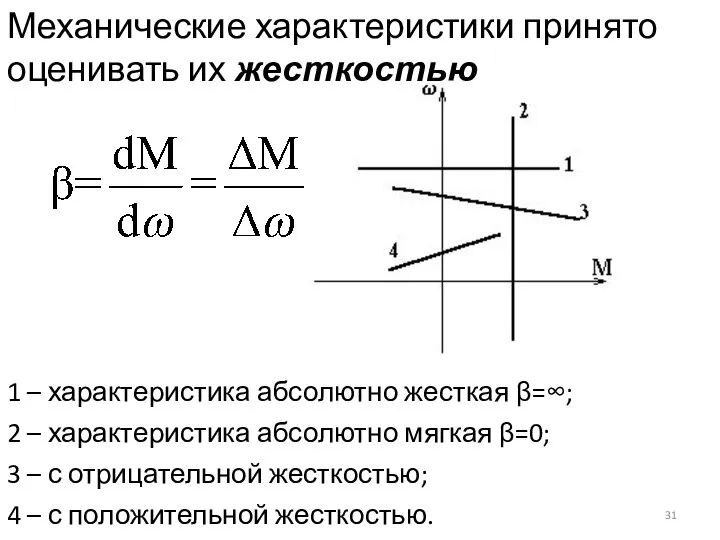
Механические характеристики принято оценивать их жесткостью
1 – характеристика абсолютно жесткая
Механические характеристики принято оценивать их жесткостью
1 – характеристика абсолютно жесткая
Абсолютно жесткая механическая характеристика свойственна синхронному электродвигателю;
жесткая (с отрицательной жесткостью)
Абсолютно жесткая механическая характеристика свойственна синхронному электродвигателю;
жесткая (с отрицательной жесткостью)
Механические характеристики двигателей (а) и производственных механизмов (б)
Механические характеристики двигателей (а) и производственных механизмов (б)
Механические характеристики производственных механизмов и их классификация
1 –синхронного двигателя;
2 – ДПТ
Механические характеристики производственных механизмов и их классификация
1 –синхронного двигателя;
2 – ДПТ
Механические характеристики двигателя и нагрузки, рассматриваемые совместно, позволяют определить координаты -
Механические характеристики двигателя и нагрузки, рассматриваемые совместно, позволяют определить координаты -
Введенное понятие механических характеристик позволяет просто и удобно выполнить проверку условия
Введенное понятие механических характеристик позволяет просто и удобно выполнить проверку условия

В зависимости от вида механических характеристик двигателя и исполнительного органа установившееся
В зависимости от вида механических характеристик двигателя и исполнительного органа установившееся
Проверка на устойчивость движения может быть выполнена аналитически, с использованием понятия
Проверка на устойчивость движения может быть выполнена аналитически, с использованием понятия
Где β – жесткость механической характеристики двигателя, βс – жесткость механической
Где β – жесткость механической характеристики двигателя, βс – жесткость механической

Рассмотрим способ определения устойчивости движения с помощью механических характеристик .
Предположим, что
Рассмотрим способ определения устойчивости движения с помощью механических характеристик .
Предположим, что
Похожие презентации
 20140616_impressionizm
20140616_impressionizm Шероховатость и волнистость
Шероховатость и волнистость Дорогой и любимый папочка, с пятидесятипятилетием
Дорогой и любимый папочка, с пятидесятипятилетием Состав и значение Агропромышленного комплекса
Состав и значение Агропромышленного комплекса Зайчики из перчаток. Поделки из перчаток
Зайчики из перчаток. Поделки из перчаток Дары Осени – 2020 выполнено учениками 2 А
Дары Осени – 2020 выполнено учениками 2 А Логические функции и элементы в полупроводниковых устройствах
Логические функции и элементы в полупроводниковых устройствах Назначение и классификация сверлильных станков
Назначение и классификация сверлильных станков Modern Learner Webinar - Most recent v2
Modern Learner Webinar - Most recent v2 Трухина 30.08.22 новое
Трухина 30.08.22 новое Научно-технический прогресс и инновационное развитие сельского хозяйства
Научно-технический прогресс и инновационное развитие сельского хозяйства Устройство котлов и котельного вспомогательного оборудования
Устройство котлов и котельного вспомогательного оборудования ____MARCH POST _call-center_ (1)
____MARCH POST _call-center_ (1) Учебная дисциплина электротехническое материаловедение
Учебная дисциплина электротехническое материаловедение Материал
Материал правоохранительные органы
правоохранительные органы 20131024_urok_matematiki
20131024_urok_matematiki Технологический процесс и организация производства междурамного крепления тележки тепловоза 2ТЭ25КМ
Технологический процесс и организация производства междурамного крепления тележки тепловоза 2ТЭ25КМ Развитие требований к сочетанию дорог с ландшафтом
Развитие требований к сочетанию дорог с ландшафтом 20150102_paustovskiy_o_lermontove_prezentatsiya
20150102_paustovskiy_o_lermontove_prezentatsiya Определение силы резания грунта бульдозером
Определение силы резания грунта бульдозером Правила перевозки грузов
Правила перевозки грузов Microsoft PowerPoint Presentation (1)
Microsoft PowerPoint Presentation (1) Не дай себя убить или Скажи наркотикам НЕТ!
Не дай себя убить или Скажи наркотикам НЕТ! Новогодний речевой утренник приложение
Новогодний речевой утренник приложение
 Что такое пуантилизм
Что такое пуантилизм руководство по заполнению заявки
руководство по заполнению заявки