- Электромеханика. Системы подчиненного регулирования параметров электроприводов

Содержание
- 2. По книгам: Волков Н. И., Миловзоров В. П. Электромашинные устройства автоматики: Учеб, для вузов по спец.
- 3. СТРУКТУРА ЗАМКНУТЫХ СИСТЕМ
- 4. В ряде случаев предъявляются повышенные требования к быстродействию электропривода, точности и удобству управления и т. д.
- 5. Значительное число приводов с замкнутой цепью управления представляют собой статические системы. В этих приводах общий коэффициент
- 6. Структура систем управления электромашинными установками не отличается от структуры систем управления другими объектами. В основе должен
- 7. Для систем управления электромашинными установками используются общепринятые методы синтеза, а именно частотный, метод типовых форм уравнений,
- 8. Для коррекции, как правило, используются обычные пассивные четырехполюсники. Токи и напряжения ограничиваются за счет нелинейных задержанных
- 9. СИСТЕМА ПОДЧИНЕННОГО РЕГУЛИРОВАНИЯ
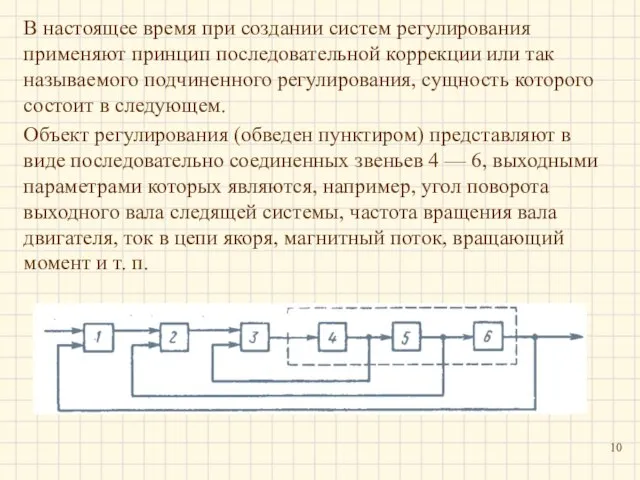
- 10. В настоящее время при создании систем регулирования применяют принцип последовательной коррекции или так называемого подчиненного регулирования,
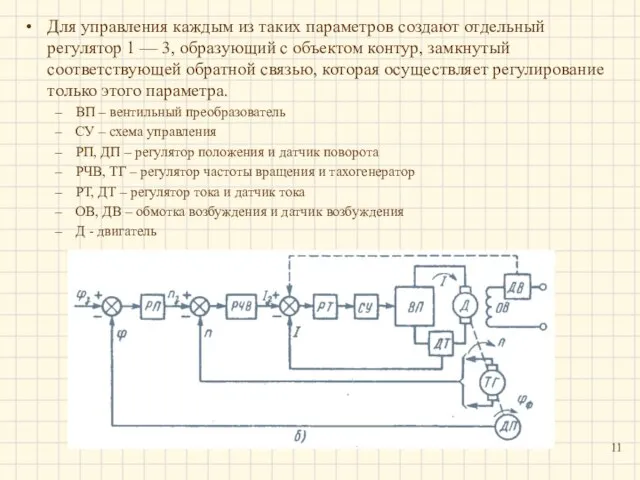
- 11. Для управления каждым из таких параметров создают отдельный регулятор 1 — 3, образующий с объектом контур,
- 12. Регуляторы соединяют последовательно так, что выход одного является входом другого. При этом замкнутые контуры регулирования образуют
- 14. Выходной сигнал регулятора частоты вращения является сигналом задания подчиненного ему регулятора тока РТ, обратная связь в
- 15. Преимуществом систем подчиненного регулирования по сравнению с системами независимого регулирования состоит в простоте анализа, синтеза и
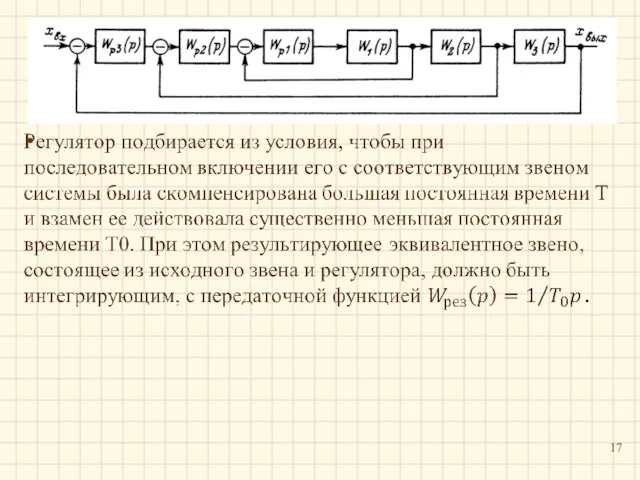
- 16. СТРУКТУРНАЯ СХЕМА
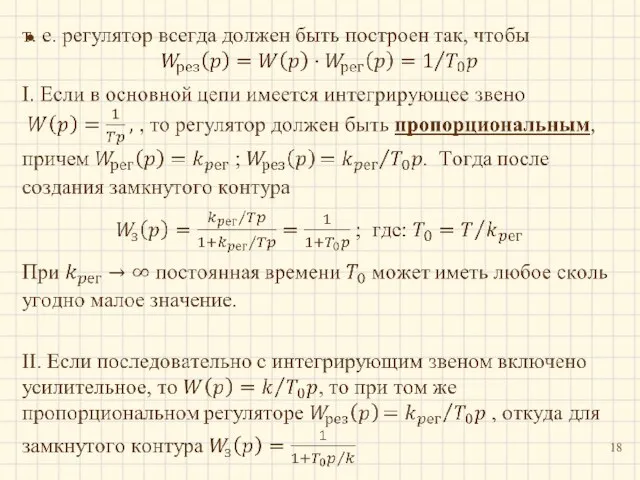
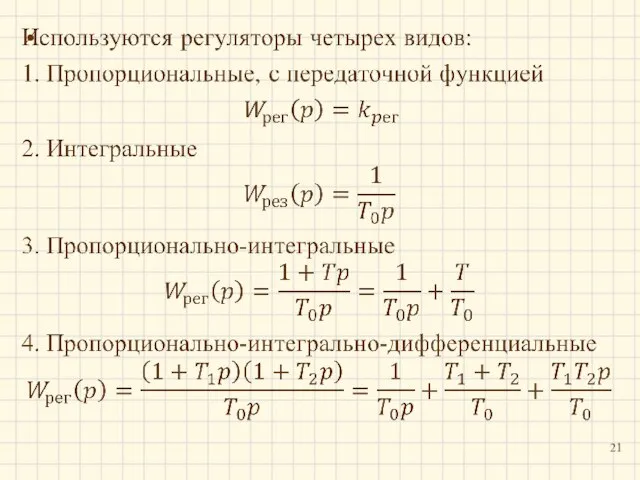
- 20. РЕГУЛЯТОРЫ
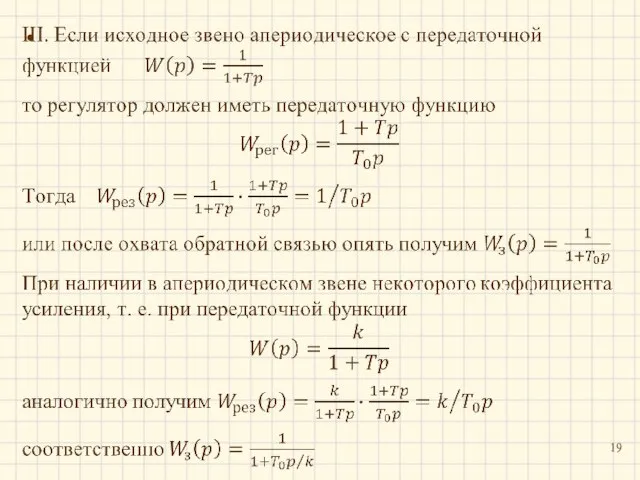
- 22. Последний вид бывает необходим при наличии двух больших постоянных времени, подлежащих компенсации, например в контуре с
- 23. ОСОБЕННОСТИ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
- 24. Некоторый диссонанс вносит двигатель постоянного тока, у которого существует внутренняя обратная связь, обусловленная ЭДС (рис. 13-2,
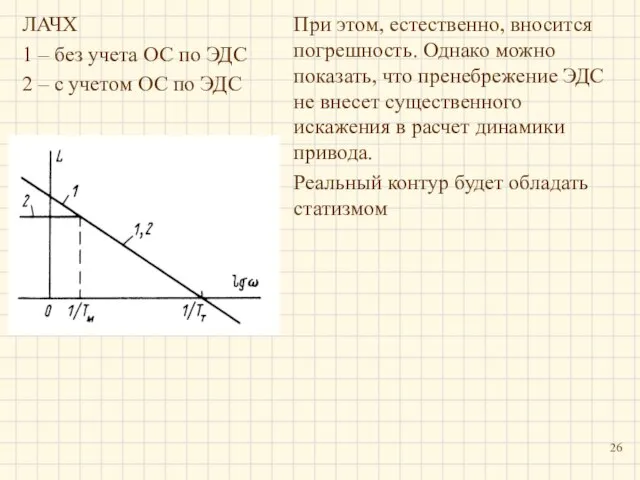
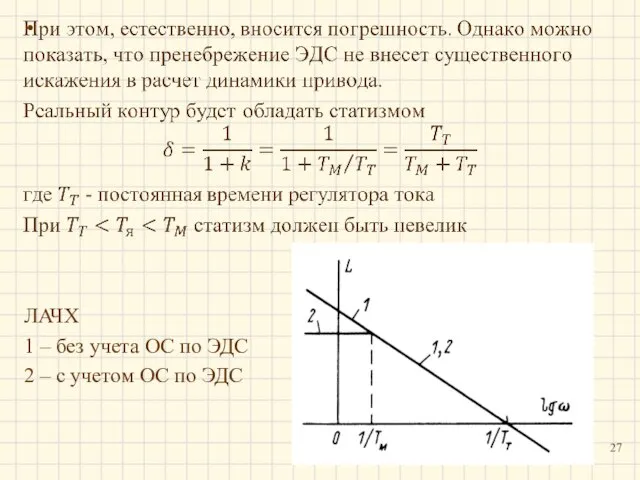
- 26. При этом, естественно, вносится погрешность. Однако можно показать, что пренебрежение ЭДС не внесет существенного искажения в
- 27. ЛАЧХ 1 – без учета ОС по ЭДС 2 – с учетом ОС по ЭДС
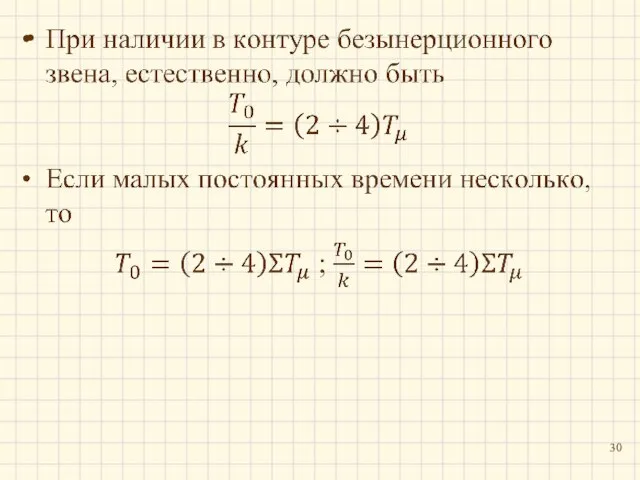
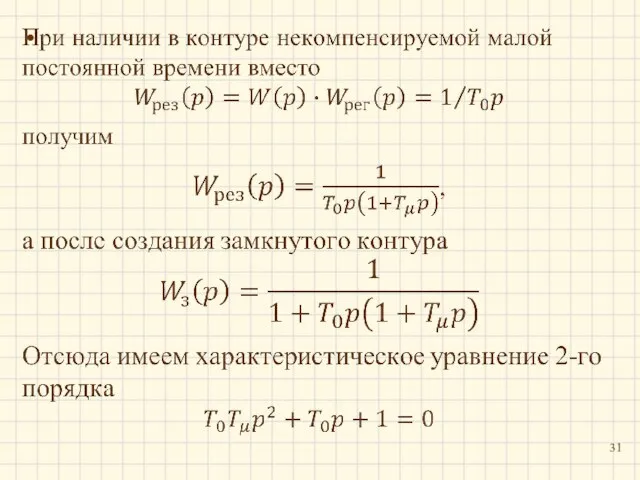
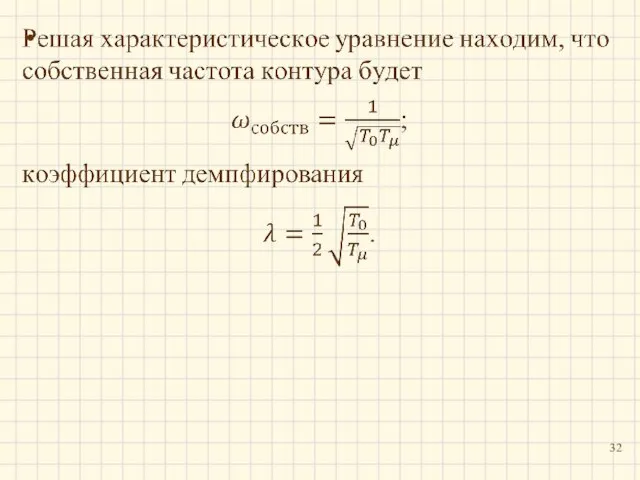
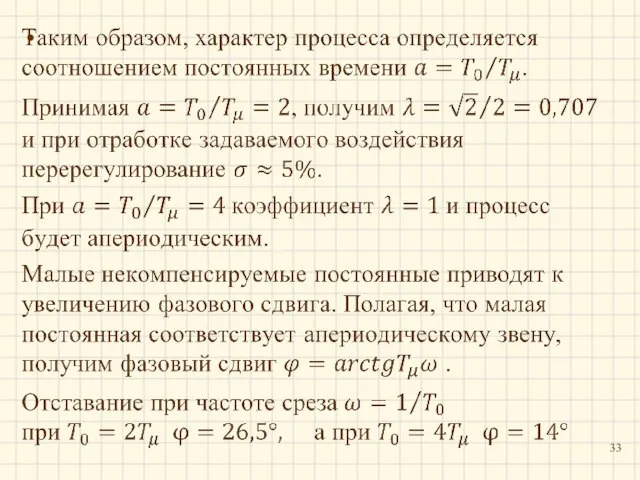
- 28. ВЫБОР ПОСТОЯННЫХ ВРЕМЕНИ РЕГУЛЯТОРОВ
- 34. СИНТЕЗ СИСТЕМ ПОДЧИНЕННОГО РЕГУЛИРОВАНИЯ
- 35. Проведем синтез системы стабилизации скорости двигателя независимого возбуждения, питаемого от тиристорного преобразователя. Схема замкнутой системы с
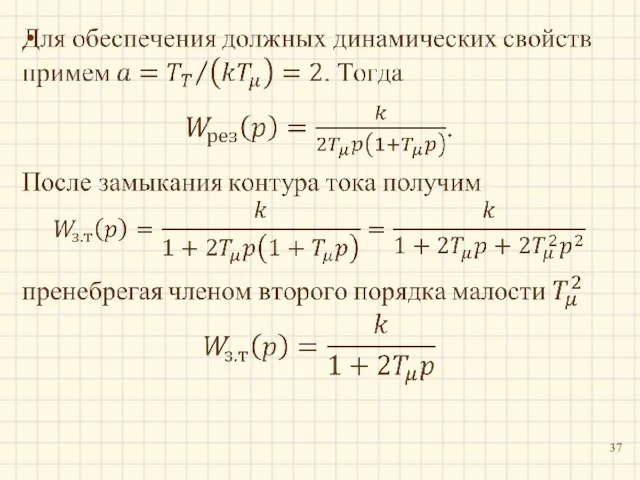
- 36. Синтез регулятора тока
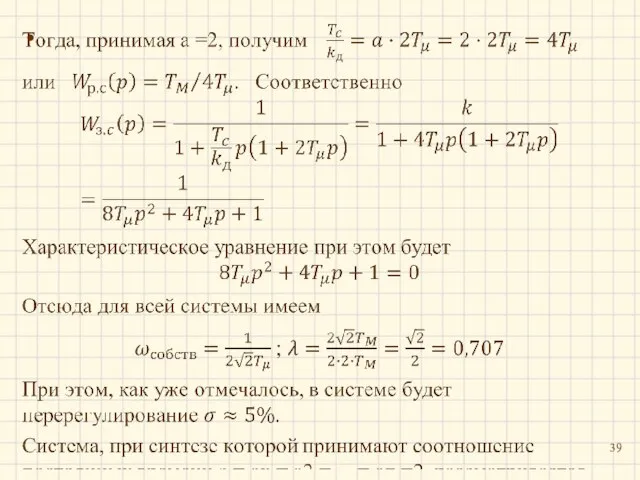
- 38. Синтез регулятора скорости
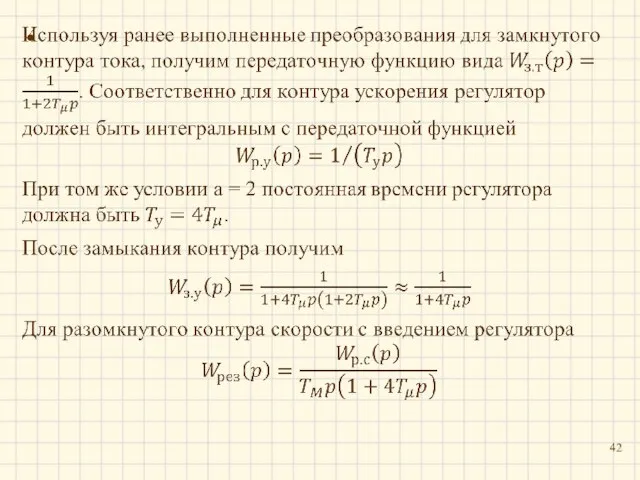
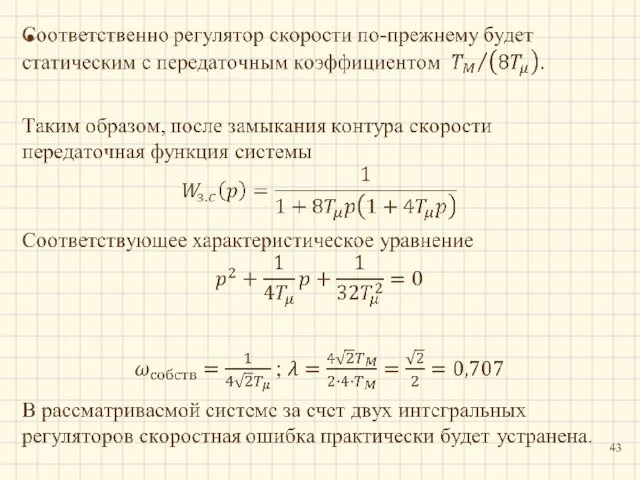
- 41. Трехконтурная система Чтобы устранить скоростную ошибку, следует ввести второй интегратор. Для этого создается еще контур ускорения
- 45. Скачать презентацию
По книгам:
Волков Н. И., Миловзоров В. П. Электромашинные устройства автоматики: Учеб,
По книгам:
Волков Н. И., Миловзоров В. П. Электромашинные устройства автоматики: Учеб,
СТРУКТУРА ЗАМКНУТЫХ СИСТЕМ
СТРУКТУРА ЗАМКНУТЫХ СИСТЕМ
В ряде случаев предъявляются повышенные требования к быстродействию электропривода, точности и
В ряде случаев предъявляются повышенные требования к быстродействию электропривода, точности и
Значительное число приводов с замкнутой цепью управления представляют собой статические системы.
Значительное число приводов с замкнутой цепью управления представляют собой статические системы.
Структура систем управления электромашинными установками не отличается от структуры систем управления
Структура систем управления электромашинными установками не отличается от структуры систем управления
Для систем управления электромашинными установками используются общепринятые методы синтеза, а именно
Для систем управления электромашинными установками используются общепринятые методы синтеза, а именно
Для коррекции, как правило, используются обычные пассивные четырехполюсники. Токи и напряжения
Для коррекции, как правило, используются обычные пассивные четырехполюсники. Токи и напряжения
СИСТЕМА ПОДЧИНЕННОГО РЕГУЛИРОВАНИЯ
СИСТЕМА ПОДЧИНЕННОГО РЕГУЛИРОВАНИЯ
В настоящее время при создании систем регулирования применяют принцип последовательной коррекции
В настоящее время при создании систем регулирования применяют принцип последовательной коррекции
Для управления каждым из таких параметров создают отдельный регулятор 1 —
Для управления каждым из таких параметров создают отдельный регулятор 1 —
Регуляторы соединяют последовательно так, что выход одного является входом другого. При
Регуляторы соединяют последовательно так, что выход одного является входом другого. При
Выходной сигнал регулятора частоты вращения является сигналом задания подчиненного ему регулятора
Выходной сигнал регулятора частоты вращения является сигналом задания подчиненного ему регулятора
Преимуществом систем подчиненного регулирования по сравнению с системами независимого регулирования состоит
Преимуществом систем подчиненного регулирования по сравнению с системами независимого регулирования состоит
СТРУКТУРНАЯ СХЕМА
СТРУКТУРНАЯ СХЕМА
РЕГУЛЯТОРЫ
РЕГУЛЯТОРЫ
Последний вид бывает необходим при наличии двух больших постоянных времени, подлежащих
Последний вид бывает необходим при наличии двух больших постоянных времени, подлежащих
ОСОБЕННОСТИ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
ОСОБЕННОСТИ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
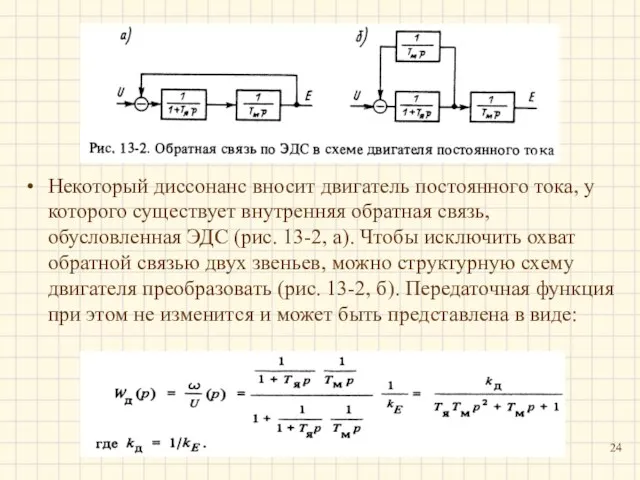
Некоторый диссонанс вносит двигатель постоянного тока, у которого существует внутренняя обратная
Некоторый диссонанс вносит двигатель постоянного тока, у которого существует внутренняя обратная
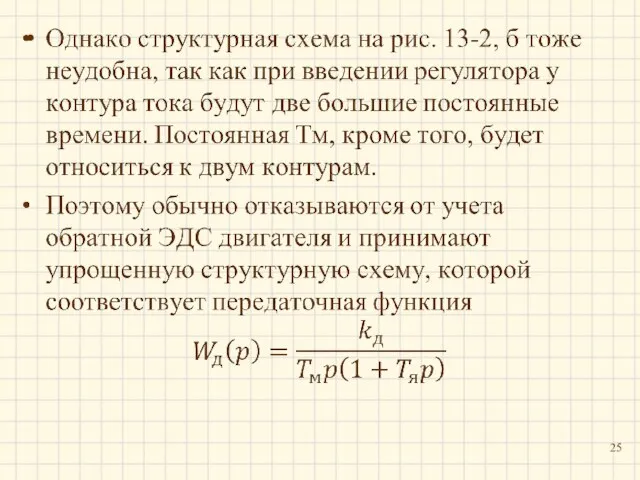
При этом, естественно, вносится погрешность. Однако можно показать, что пренебрежение ЭДС
При этом, естественно, вносится погрешность. Однако можно показать, что пренебрежение ЭДС
ЛАЧХ
1 – без учета ОС по ЭДС
2 – с учетом ОС
ЛАЧХ
1 – без учета ОС по ЭДС
2 – с учетом ОС
ВЫБОР ПОСТОЯННЫХ ВРЕМЕНИ РЕГУЛЯТОРОВ
ВЫБОР ПОСТОЯННЫХ ВРЕМЕНИ РЕГУЛЯТОРОВ
СИНТЕЗ СИСТЕМ ПОДЧИНЕННОГО РЕГУЛИРОВАНИЯ
СИНТЕЗ СИСТЕМ ПОДЧИНЕННОГО РЕГУЛИРОВАНИЯ
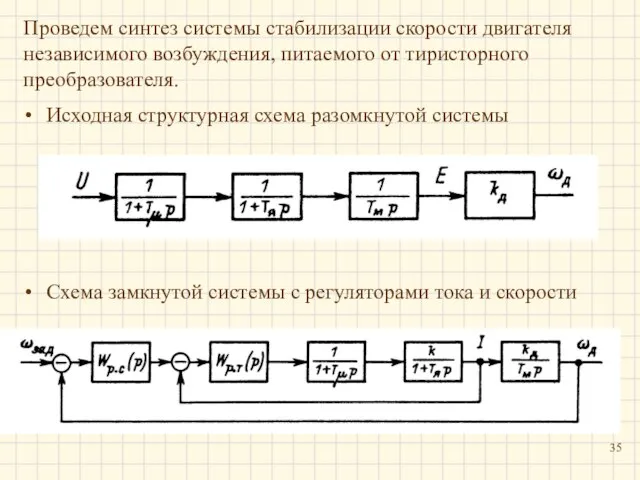
Проведем синтез системы стабилизации скорости двигателя независимого возбуждения, питаемого от тиристорного
Проведем синтез системы стабилизации скорости двигателя независимого возбуждения, питаемого от тиристорного
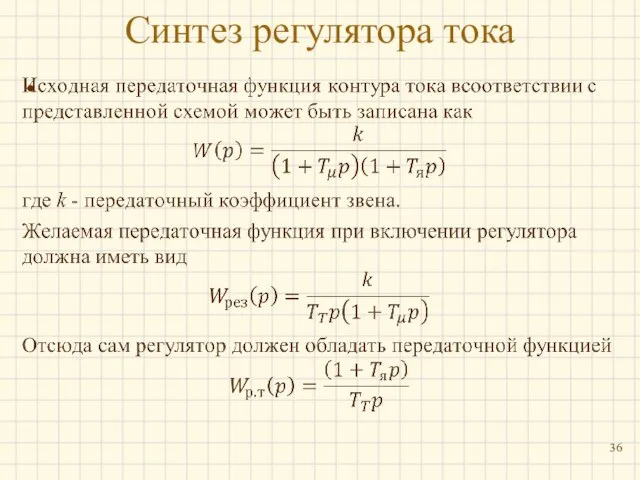
Синтез регулятора тока
Синтез регулятора тока
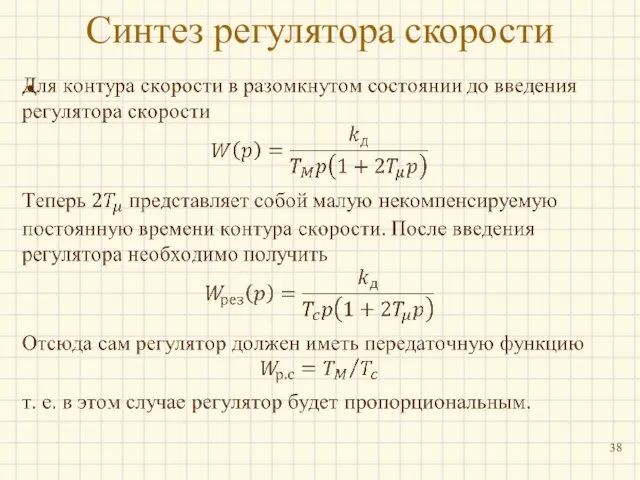
Синтез регулятора скорости
Синтез регулятора скорости
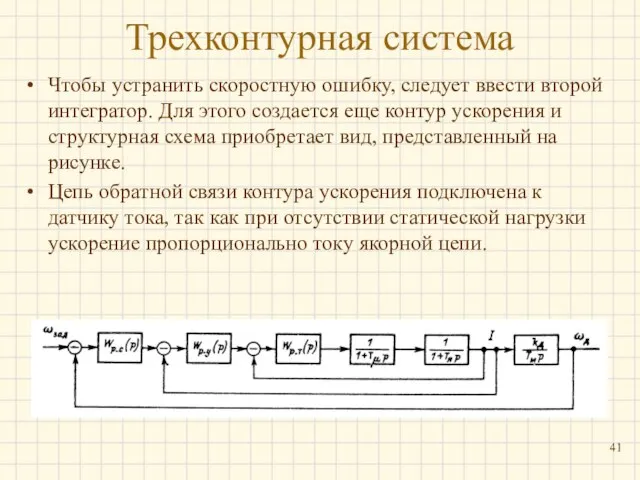
Трехконтурная система
Чтобы устранить скоростную ошибку, следует ввести второй интегратор. Для этого
Трехконтурная система
Чтобы устранить скоростную ошибку, следует ввести второй интегратор. Для этого
 20180416_sotsialno-psihologicheskaya_sluzhba_shkoly
20180416_sotsialno-psihologicheskaya_sluzhba_shkoly 1439516
1439516 Способы штамповки электротехнической стали
Способы штамповки электротехнической стали Открытие дополнительных видов деятельности АО ПУЛ транс
Открытие дополнительных видов деятельности АО ПУЛ транс Деловые переговоры
Деловые переговоры Введение в хронобиологию. Генераторы эндогенного времени
Введение в хронобиологию. Генераторы эндогенного времени Выплавка стали
Выплавка стали Расчет параметров схемы замещения силового оборудования
Расчет параметров схемы замещения силового оборудования 16 от диктатуры к импери
16 от диктатуры к импери Ремонт трансформаторов
Ремонт трансформаторов Подготовка к сочинению Два мира в картине Рустема Хузина У окна
Подготовка к сочинению Два мира в картине Рустема Хузина У окна Проектирование LED-фонаря
Проектирование LED-фонаря Диабетическая ретинопатия. Современная тактика терапевтического лечения
Диабетическая ретинопатия. Современная тактика терапевтического лечения Разработка информационной системы автоматизации рабочего места заведующего складом
Разработка информационной системы автоматизации рабочего места заведующего складом Улицы Победы на карте Города трудовой доблести Челябинска
Улицы Победы на карте Города трудовой доблести Челябинска Землетрясение
Землетрясение Классификация танкеров
Классификация танкеров Фигуры undertale
Фигуры undertale Охрана животных. Заповедники России
Охрана животных. Заповедники России Россия- страна возможностей
Россия- страна возможностей В мире мудрых мыслей
В мире мудрых мыслей Наша Жизнь!
Наша Жизнь! Платье моей мечты
Платье моей мечты Вечер встречи выпускников
Вечер встречи выпускников Моделирование плечевого изделия с цельнокроенным рукавом
Моделирование плечевого изделия с цельнокроенным рукавом Острейшие экологические проблемы современности. Химическое оружие, пестициды. Нитраты. Диоксины
Острейшие экологические проблемы современности. Химическое оружие, пестициды. Нитраты. Диоксины Практические методы исследования
Практические методы исследования Тема Берегите воду!
Тема Берегите воду!