- Элементарные действия. Алгоритмические структуры

Содержание
- 2. Движение вперед базовой тележки задается подачей на левый и правый мотор одинаковой скорости В ТРИК Студии
- 3. В 2D модели по умолчанию левый мотор подключен к порту M3, правый – M4 На выпадающем
- 4. Повороты Повороты можно разделить на 3 типа: резкий поворот мощность подается только на одно колесо плавный
- 5. Модели алгоритмов Представленные выше алгоритмы – тайм-модели. Движение осуществляется по таймеру. Это «плохой» подход, так как
- 6. Поставьте галочку в окошко «Сетка». Теперь Вы можете отслеживать точные перемещения модели. (1 клетка = 17,5
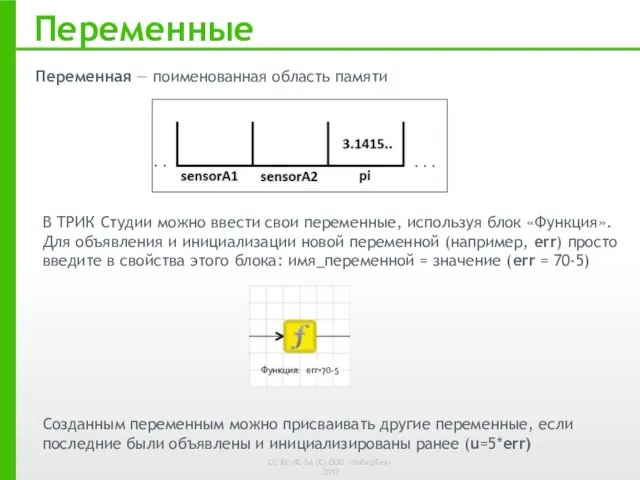
- 7. Переменные В ТРИК Студии можно ввести свои переменные, используя блок «Функция». Для объявления и инициализации новой
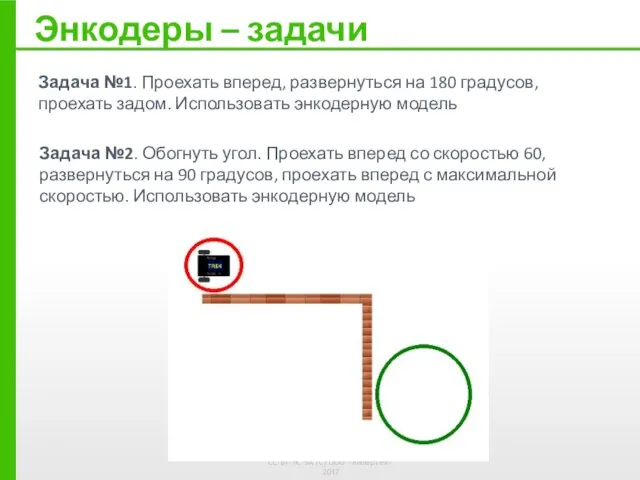
- 8. Энкодеры – задачи Задача №1. Проехать вперед, развернуться на 180 градусов, проехать задом. Использовать энкодерную модель
- 9. Задача. Проехать вперед ровно на 1 метр и 5 сантиметров. Использовать энкодерную модель Для этого Вам
- 10. Решение. Для решения этой задачи, необходимо вспомнить элементарные формулы из курса школьной математики: расчет длины окружности
- 11. Алгоритм — набор инструкций, описывающих порядок действий исполнителя для достижения результата решения задачи за конечное число
- 12. Алгоритмические структуры Следование. Предполагает последовательное выполнение команд сверху вниз. Если алгоритм состоит только из структур следования,
- 13. Следование
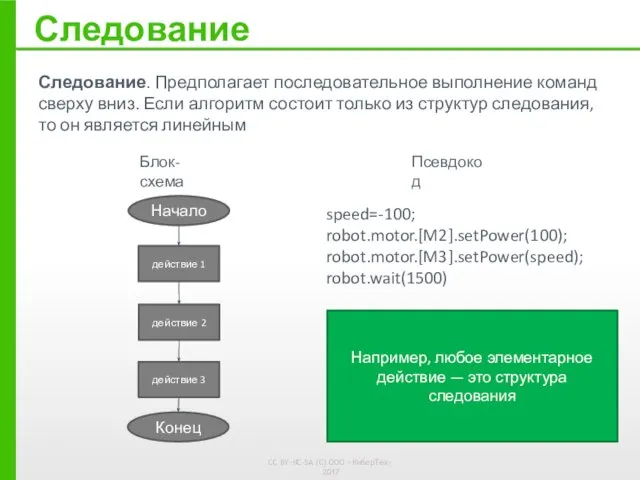
- 14. Следование Следование. Предполагает последовательное выполнение команд сверху вниз. Если алгоритм состоит только из структур следования, то
- 15. Следование – задача Задача. Написать алгоритм движения модели «змейкой». Использовать энкодерную модель
- 16. Ветвление
- 17. Ветвление. Выполнение программы идет по одной из двух, нескольких или множества ветвей. Выбор ветви зависит от
- 18. Ветвление Ветвление «если-то» Блок-схема if (encoder.[B2].read() robot.motor.[M2].setPower(100); robot.motor.[M1].setPower(100); Условие Начало действие 1 нет да действие 2
- 19. Ветвление Блок-схема Псевдокод if (encoder.[B2].read() robot.motor.[M2].setPower(100); else robot.motor.[M1].setPower(100); robot.wait(2000); Условие действие 1 Начало действие 2 нет
- 20. Ветвление Блок-схема Псевдокод if (encoder.[B2].read() robot.motor.[M2].setPower(50); elseif robot.motor.[M2].setPower(100); robot.wait(2000); Условие Действие 2 действие 1 нет да
- 21. Ветвление Псевдокод if (encoder.[B2].read() robot.motor.[M2].setPower(50); elseif (encoder.[B2].read() robot.motor.[M2].setPower(100); else robot.motor.[M1].setPower(100); robot.wait(2000); Условие Действие 2 действие 1
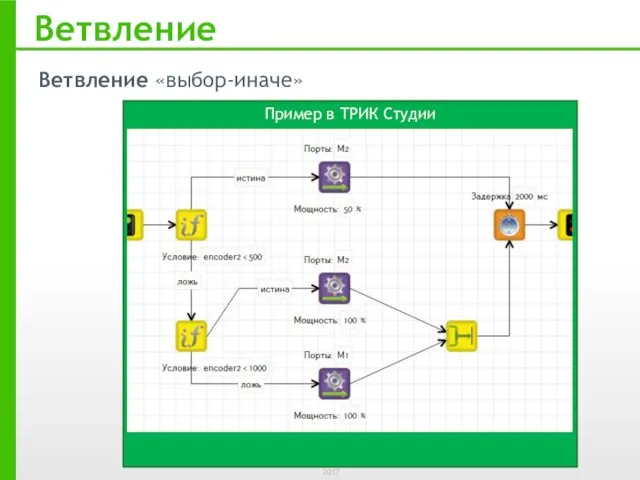
- 22. Ветвление Пример в ТРИК Студии Ветвление «выбор-иначе»
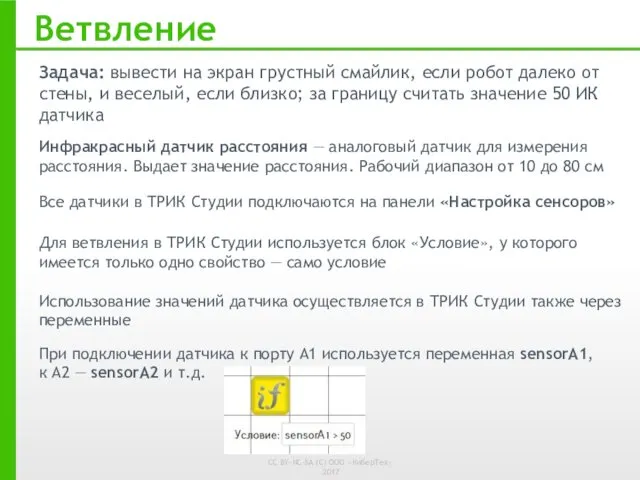
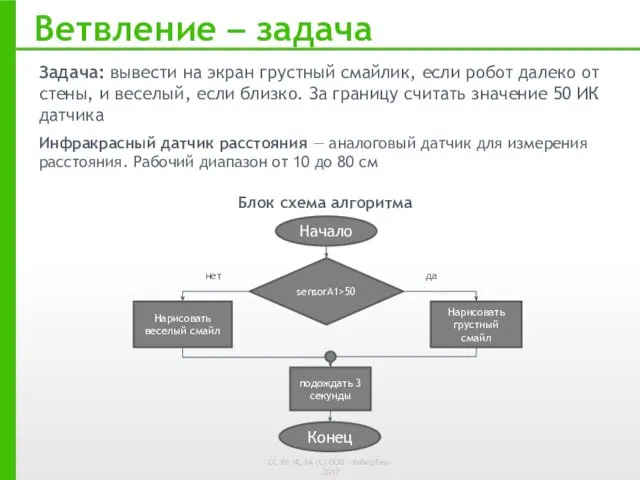
- 23. Ветвление Задача: вывести на экран грустный смайлик, если робот далеко от стены, и веселый, если близко;
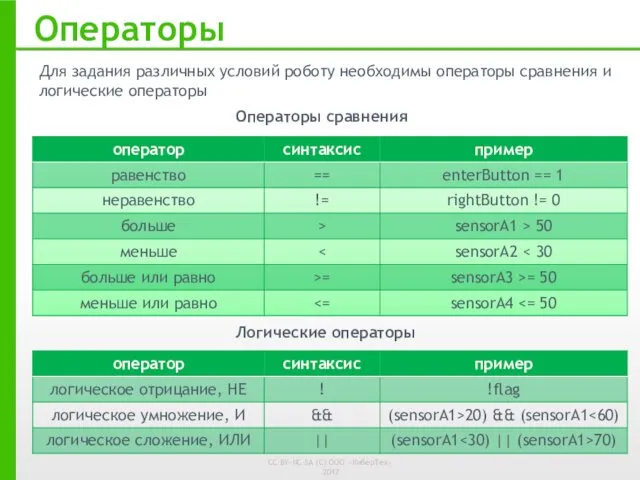
- 24. Операторы Операторы сравнения Логические операторы Для задания различных условий роботу необходимы операторы сравнения и логические операторы
- 25. Ветвление – задача Инфракрасный датчик расстояния — аналоговый датчик для измерения расстояния. Рабочий диапазон от 10
- 26. Ветвление – задача Псевдокод if (robot.sensor.[A1].read() > 50) robot.sadSmile(); else robot.smile(); robot.wait(3000); Решение в ТРИК Студии
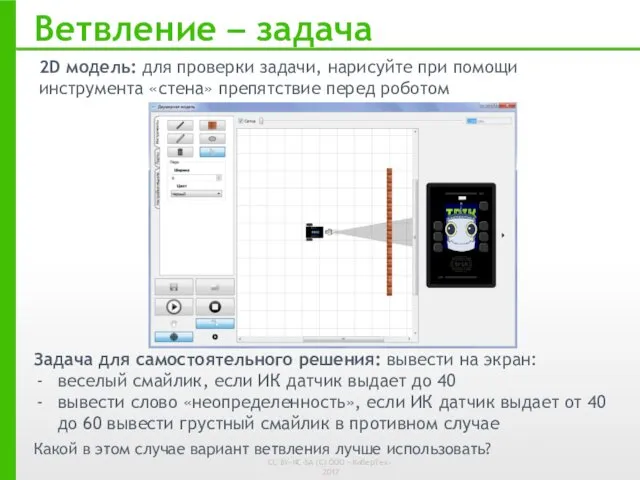
- 27. Ветвление – задача Задача для самостоятельного решения: вывести на экран: веселый смайлик, если ИК датчик выдает
- 28. Цикл
- 29. Цикл Цикл. Предполагает возможность многократного повторения определенных действий. Количество повторений зависит от условия цикла Существует 4
- 30. Цикл Блок-схема Псевдокод while true do robot.motor.[M2].setPower(100); Пример в ТРИК Студии Цикл бесконечный (безусловный) Условие Начало
- 31. Цикл Цикл с итерациями Блок-схема robot.motor.[M3].setPower(100); for (i = 0; i robot.wait(1); robot.motor.[M4].setPower(100); Счетчик с условием
- 32. Цикл Цикл с предусловием Блок-схема while encoder.[E2].read() robot.motor.[M2].setPower(100); robot.motor.[M1].setPower(100); Условие Начало действие 1 нет да действие
- 33. Цикл Цикл с постусловием Блок-схема do robot.motor.[M2].setPower(100); robot.wait(1); while encoder.[E2].read() robot.motor.[M1].setPower(100); Условие Начало действие 1 нет
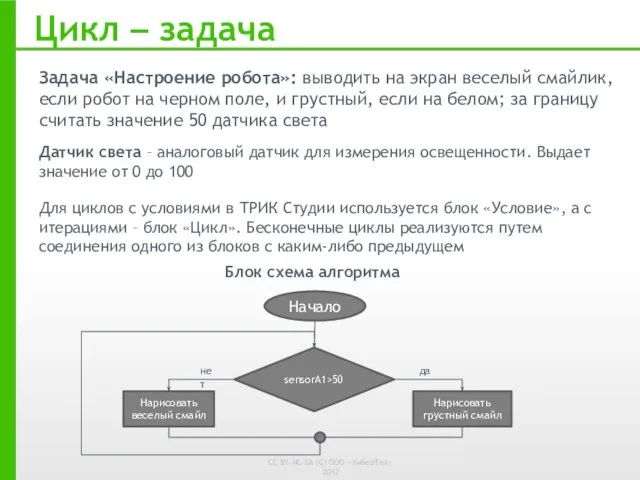
- 34. Задача «Настроение робота»: выводить на экран веселый смайлик, если робот на черном поле, и грустный, если
- 35. Псевдокод while true do if (robot.sensor.[A1].read() > 50) robot.smile(); else robot.sadSmile(); robot.wait(30); Решение в ТРИК Студии
- 36. 2D модель: нарисуйте масляное пятно при помощи инструмента «карандаш». Толщину карандаша задайте «30» Цикл – задача
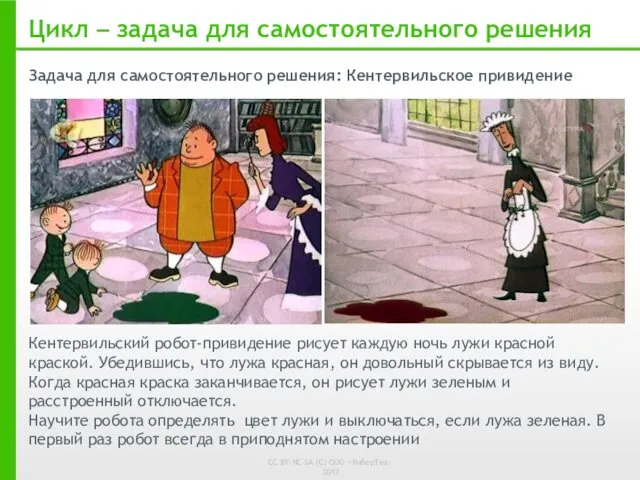
- 37. Задача для самостоятельного решения: Кентервильское привидение Кентервильский робот-привидение рисует каждую ночь лужи красной краской. Убедившись, что
- 38. Задача для самостоятельного решения: Кентервильское привидение Пояснение: выводить на экран: веселый смайлик, если робот видит красную
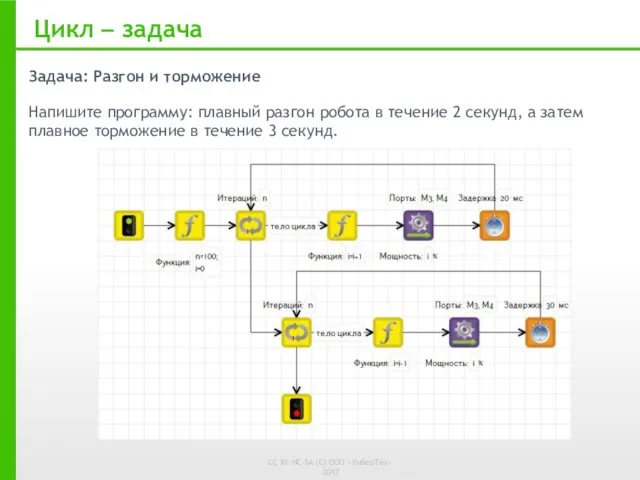
- 39. Задача: Разгон и торможение Напишите программу: плавный разгон робота в течение 2 секунд, а затем плавное
- 40. Swith
- 41. Представляет собой структуру, построенную по принципу меню, и содержит все возможные варианты условий и инструкции, которые
- 42. Данный пример демонстрирует случайный выбор одного из четырех состояний робота: «Я готов к роботе», «Улыбаюсь», «Грущу»,
- 43. Switch – задача Задача: выводить на экран робота в 2D модели по нажатию код кнопок контроллера
- 45. Скачать презентацию

Движение вперед базовой тележки задается подачей на левый и правый мотор
Движение вперед базовой тележки задается подачей на левый и правый мотор
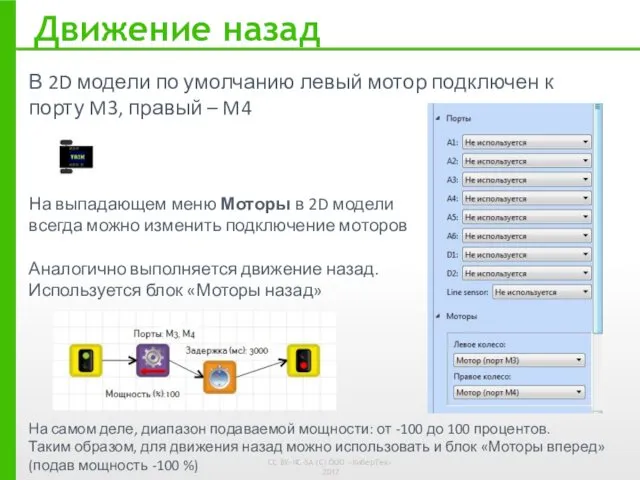
В 2D модели по умолчанию левый мотор подключен к порту M3,
В 2D модели по умолчанию левый мотор подключен к порту M3,

Повороты
Повороты можно разделить на 3 типа:
резкий поворот
мощность подается только на
Повороты
Повороты можно разделить на 3 типа:
резкий поворот
мощность подается только на

Модели алгоритмов
Представленные выше алгоритмы – тайм-модели. Движение осуществляется по таймеру. Это
Модели алгоритмов
Представленные выше алгоритмы – тайм-модели. Движение осуществляется по таймеру. Это
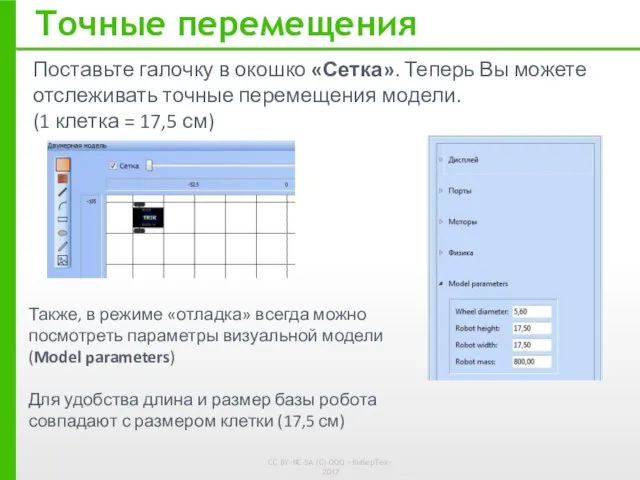
Поставьте галочку в окошко «Сетка». Теперь Вы можете отслеживать точные перемещения
Поставьте галочку в окошко «Сетка». Теперь Вы можете отслеживать точные перемещения
Переменные
В ТРИК Студии можно ввести свои переменные, используя блок «Функция». Для
Переменные
В ТРИК Студии можно ввести свои переменные, используя блок «Функция». Для
Энкодеры – задачи
Задача №1. Проехать вперед, развернуться на 180 градусов,
Энкодеры – задачи
Задача №1. Проехать вперед, развернуться на 180 градусов,
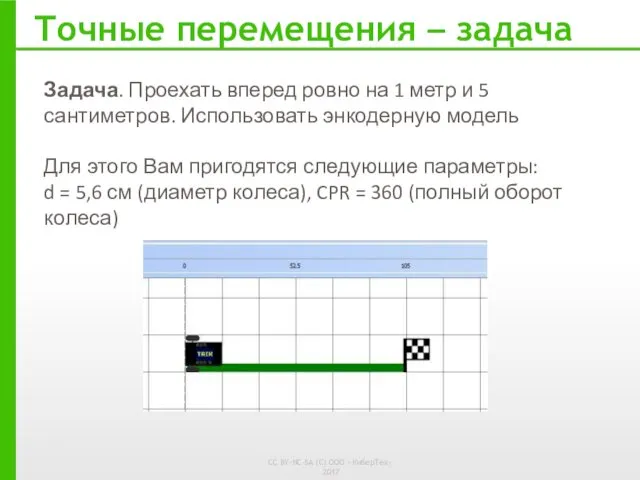
Задача. Проехать вперед ровно на 1 метр и 5 сантиметров. Использовать
Задача. Проехать вперед ровно на 1 метр и 5 сантиметров. Использовать
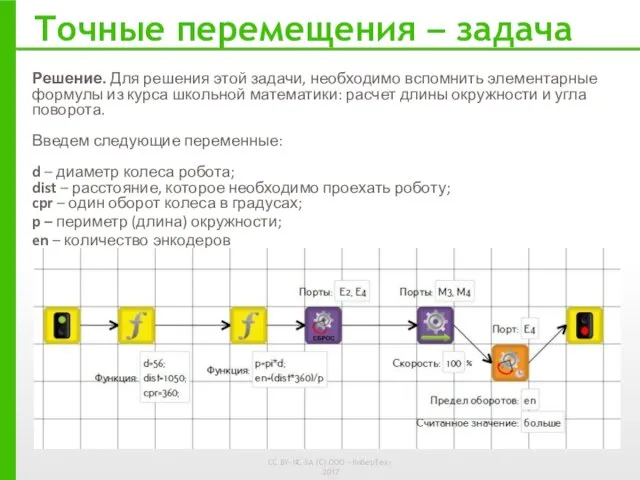
Решение. Для решения этой задачи, необходимо вспомнить элементарные формулы из курса
Решение. Для решения этой задачи, необходимо вспомнить элементарные формулы из курса
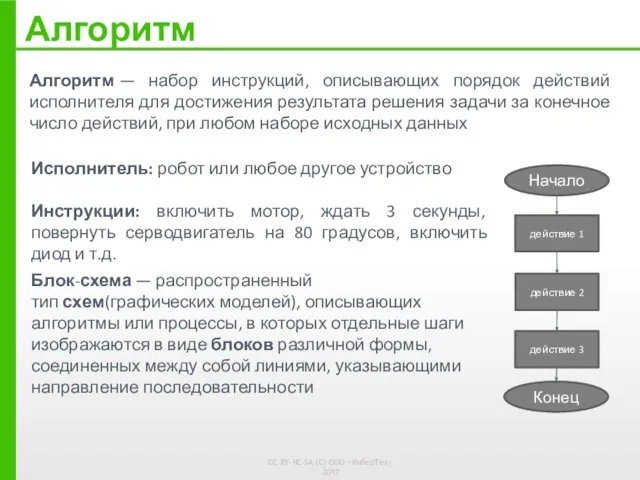
Алгоритм — набор инструкций, описывающих порядок действий исполнителя для достижения результата решения
Алгоритм — набор инструкций, описывающих порядок действий исполнителя для достижения результата решения
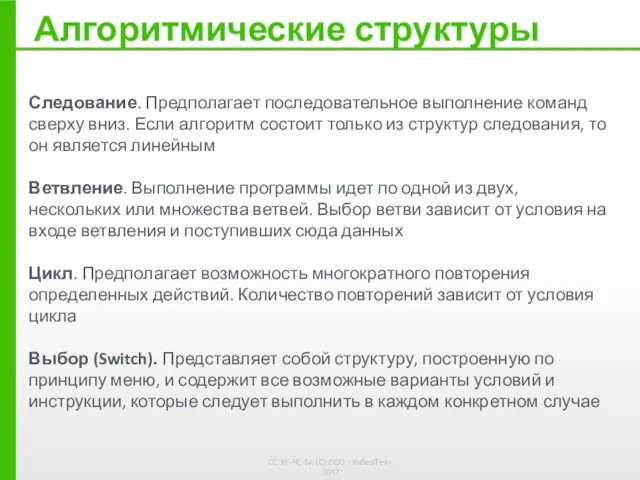
Алгоритмические структуры
Следование. Предполагает последовательное выполнение команд сверху вниз. Если алгоритм состоит
Алгоритмические структуры
Следование. Предполагает последовательное выполнение команд сверху вниз. Если алгоритм состоит
Следование
Следование
Следование
Следование. Предполагает последовательное выполнение команд сверху вниз. Если алгоритм состоит только
Следование
Следование. Предполагает последовательное выполнение команд сверху вниз. Если алгоритм состоит только
Следование – задача
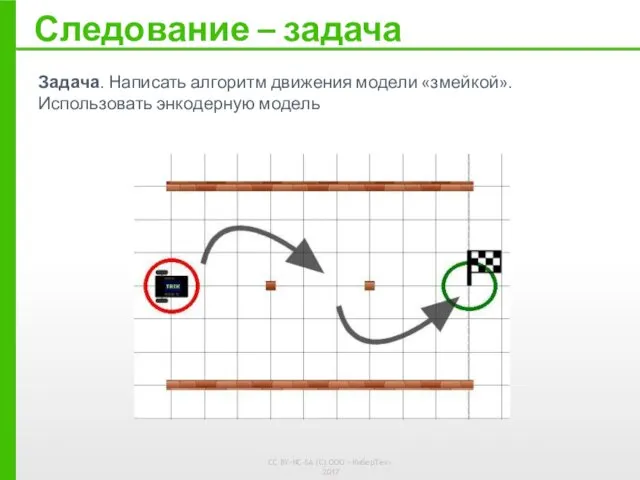
Задача. Написать алгоритм движения модели «змейкой».
Использовать энкодерную модель
Следование – задача
Задача. Написать алгоритм движения модели «змейкой».
Использовать энкодерную модель
Ветвление
Ветвление
Ветвление. Выполнение программы идет по одной из двух, нескольких или множества
Ветвление. Выполнение программы идет по одной из двух, нескольких или множества
![Ветвление Ветвление «если-то» Блок-схема if (encoder.[B2].read() robot.motor.[M2].setPower(100); robot.motor.[M1].setPower(100); Условие Начало действие](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/460550/slide-17.jpg)
Ветвление
Ветвление «если-то»
Блок-схема
if (encoder.[B2].read() < 500)
robot.motor.[M2].setPower(100);
robot.motor.[M1].setPower(100);
Условие
Начало
действие 1
нет
да
действие 2
Конец
Пример в ТРИК Студии
Псевдокод
Ветвление
Ветвление «если-то»
Блок-схема
if (encoder.[B2].read() < 500)
robot.motor.[M2].setPower(100);
robot.motor.[M1].setPower(100);
Условие
Начало
действие 1
нет
да
действие 2
Конец
Пример в ТРИК Студии
Псевдокод
![Ветвление Блок-схема Псевдокод if (encoder.[B2].read() robot.motor.[M2].setPower(100); else robot.motor.[M1].setPower(100); robot.wait(2000); Условие действие](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/460550/slide-18.jpg)
Ветвление
Блок-схема
Псевдокод
if (encoder.[B2].read() < 500)
robot.motor.[M2].setPower(100);
else
robot.motor.[M1].setPower(100);
robot.wait(2000);
Условие
действие 1
Начало
действие 2
нет
да
действие 3
Конец
Пример в ТРИК
Ветвление
Блок-схема
Псевдокод
if (encoder.[B2].read() < 500)
robot.motor.[M2].setPower(100);
else
robot.motor.[M1].setPower(100);
robot.wait(2000);
Условие
действие 1
Начало
действие 2
нет
да
действие 3
Конец
Пример в ТРИК
![Ветвление Блок-схема Псевдокод if (encoder.[B2].read() robot.motor.[M2].setPower(50); elseif robot.motor.[M2].setPower(100); robot.wait(2000); Условие Действие](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/460550/slide-19.jpg)
Ветвление
Блок-схема
Псевдокод
if (encoder.[B2].read() < 500)
robot.motor.[M2].setPower(50);
elseif
robot.motor.[M2].setPower(100);
robot.wait(2000);
Условие
Действие 2
действие 1
нет
да
действие 3
Пример в ТРИК
Ветвление
Блок-схема
Псевдокод
if (encoder.[B2].read() < 500)
robot.motor.[M2].setPower(50);
elseif
robot.motor.[M2].setPower(100);
robot.wait(2000);
Условие
Действие 2
действие 1
нет
да
действие 3
Пример в ТРИК
![Ветвление Псевдокод if (encoder.[B2].read() robot.motor.[M2].setPower(50); elseif (encoder.[B2].read() robot.motor.[M2].setPower(100); else robot.motor.[M1].setPower(100); robot.wait(2000);](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/460550/slide-20.jpg)
Ветвление
Псевдокод
if (encoder.[B2].read() < 500)
robot.motor.[M2].setPower(50);
elseif (encoder.[B2].read() < 1000)
robot.motor.[M2].setPower(100);
else
robot.motor.[M1].setPower(100);
robot.wait(2000);
Условие
Действие 2
действие
Ветвление
Псевдокод
if (encoder.[B2].read() < 500)
robot.motor.[M2].setPower(50);
elseif (encoder.[B2].read() < 1000)
robot.motor.[M2].setPower(100);
else
robot.motor.[M1].setPower(100);
robot.wait(2000);
Условие
Действие 2
действие
Ветвление
Пример в ТРИК Студии
Ветвление «выбор-иначе»
Ветвление
Пример в ТРИК Студии
Ветвление «выбор-иначе»
Ветвление
Задача: вывести на экран грустный смайлик, если робот далеко от стены,
Ветвление
Задача: вывести на экран грустный смайлик, если робот далеко от стены,
Операторы
Операторы сравнения
Логические операторы
Для задания различных условий роботу необходимы операторы сравнения и
Операторы
Операторы сравнения
Логические операторы
Для задания различных условий роботу необходимы операторы сравнения и
Ветвление – задача
Инфракрасный датчик расстояния — аналоговый датчик для измерения расстояния.
Ветвление – задача
Инфракрасный датчик расстояния — аналоговый датчик для измерения расстояния.
![Ветвление – задача Псевдокод if (robot.sensor.[A1].read() > 50) robot.sadSmile(); else robot.smile();](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/460550/slide-25.jpg)
Ветвление – задача
Псевдокод
if (robot.sensor.[A1].read() > 50)
robot.sadSmile();
else
robot.smile();
robot.wait(3000);
Решение в ТРИК
Ветвление – задача
Псевдокод
if (robot.sensor.[A1].read() > 50)
robot.sadSmile();
else
robot.smile();
robot.wait(3000);
Решение в ТРИК
Ветвление – задача
Задача для самостоятельного решения: вывести на экран:
веселый смайлик,
Ветвление – задача
Задача для самостоятельного решения: вывести на экран:
веселый смайлик,
Цикл
Цикл
Цикл
Цикл. Предполагает возможность многократного повторения определенных действий. Количество повторений зависит от
Цикл
Цикл. Предполагает возможность многократного повторения определенных действий. Количество повторений зависит от
![Цикл Блок-схема Псевдокод while true do robot.motor.[M2].setPower(100); Пример в ТРИК Студии](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/460550/slide-29.jpg)
Цикл
Блок-схема
Псевдокод
while true do
robot.motor.[M2].setPower(100);
Пример в ТРИК Студии
Цикл бесконечный (безусловный)
Условие
Начало
действие 1
В
Цикл
Блок-схема
Псевдокод
while true do
robot.motor.[M2].setPower(100);
Пример в ТРИК Студии
Цикл бесконечный (безусловный)
Условие
Начало
действие 1
В
![Цикл Цикл с итерациями Блок-схема robot.motor.[M3].setPower(100); for (i = 0; i](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/460550/slide-30.jpg)
Цикл
Цикл с итерациями
Блок-схема
robot.motor.[M3].setPower(100);
for (i = 0; i < 1000; i++)
robot.wait(1);
robot.motor.[M4].setPower(100);
Счетчик
Цикл
Цикл с итерациями
Блок-схема
robot.motor.[M3].setPower(100);
for (i = 0; i < 1000; i++)
robot.wait(1);
robot.motor.[M4].setPower(100);
Счетчик
![Цикл Цикл с предусловием Блок-схема while encoder.[E2].read() robot.motor.[M2].setPower(100); robot.motor.[M1].setPower(100); Условие Начало](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/460550/slide-31.jpg)
Цикл
Цикл с предусловием
Блок-схема
while encoder.[E2].read() < 500 do
robot.motor.[M2].setPower(100);
robot.motor.[M1].setPower(100);
Условие
Начало
действие 1
нет
да
действие 2
Конец
Пример в
Цикл
Цикл с предусловием
Блок-схема
while encoder.[E2].read() < 500 do
robot.motor.[M2].setPower(100);
robot.motor.[M1].setPower(100);
Условие
Начало
действие 1
нет
да
действие 2
Конец
Пример в
![Цикл Цикл с постусловием Блок-схема do robot.motor.[M2].setPower(100); robot.wait(1); while encoder.[E2].read() robot.motor.[M1].setPower(100);](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/460550/slide-32.jpg)
Цикл
Цикл с постусловием
Блок-схема
do
robot.motor.[M2].setPower(100);
robot.wait(1);
while encoder.[E2].read() < 500
robot.motor.[M1].setPower(100);
Условие
Начало
действие 1
нет
да
действие 2
Конец
Пример
Цикл
Цикл с постусловием
Блок-схема
do
robot.motor.[M2].setPower(100);
robot.wait(1);
while encoder.[E2].read() < 500
robot.motor.[M1].setPower(100);
Условие
Начало
действие 1
нет
да
действие 2
Конец
Пример
Задача «Настроение робота»: выводить на экран веселый смайлик, если робот на
Задача «Настроение робота»: выводить на экран веселый смайлик, если робот на
![Псевдокод while true do if (robot.sensor.[A1].read() > 50) robot.smile(); else robot.sadSmile();](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/460550/slide-34.jpg)
Псевдокод
while true do
if (robot.sensor.[A1].read() > 50)
robot.smile();
else
robot.sadSmile();
Псевдокод
while true do
if (robot.sensor.[A1].read() > 50)
robot.smile();
else
robot.sadSmile();
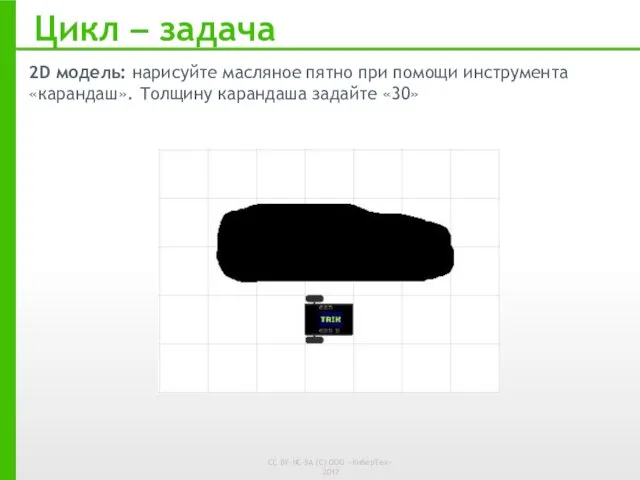
2D модель: нарисуйте масляное пятно при помощи инструмента «карандаш». Толщину карандаша
2D модель: нарисуйте масляное пятно при помощи инструмента «карандаш». Толщину карандаша
Задача для самостоятельного решения: Кентервильское привидение
Кентервильский робот-привидение рисует каждую ночь лужи
Задача для самостоятельного решения: Кентервильское привидение
Кентервильский робот-привидение рисует каждую ночь лужи

Задача для самостоятельного решения: Кентервильское привидение
Пояснение:
выводить на экран:
веселый смайлик, если
Задача для самостоятельного решения: Кентервильское привидение
Пояснение:
выводить на экран:
веселый смайлик, если
Задача: Разгон и торможение
Напишите программу: плавный разгон робота в течение 2
Задача: Разгон и торможение
Напишите программу: плавный разгон робота в течение 2
Swith
Swith

Представляет собой структуру, построенную по принципу меню, и содержит все возможные
Представляет собой структуру, построенную по принципу меню, и содержит все возможные
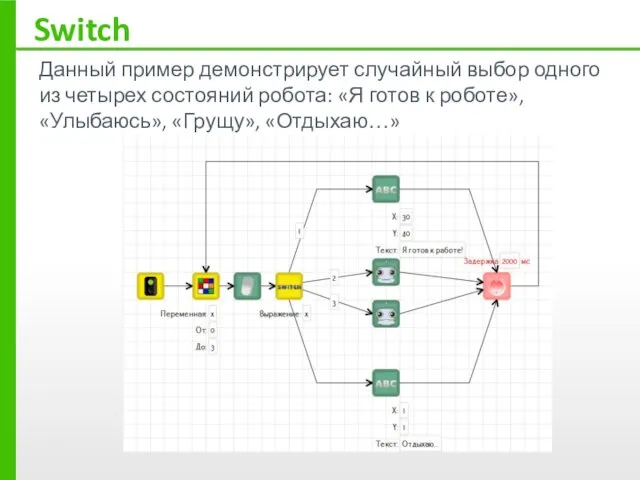
Данный пример демонстрирует случайный выбор одного из четырех состояний робота: «Я
Данный пример демонстрирует случайный выбор одного из четырех состояний робота: «Я

Switch – задача
Задача: выводить на экран робота в 2D модели по
Switch – задача
Задача: выводить на экран робота в 2D модели по
 Неисправности стрелочного перевода
Неисправности стрелочного перевода Tekla structures
Tekla structures Благоустройство тротуаров и территории г. Уржум, по улице Елкина
Благоустройство тротуаров и территории г. Уржум, по улице Елкина Touchscreen implementation for multi-touch
Touchscreen implementation for multi-touch Пушное звероводство
Пушное звероводство Физические основы когерентной обработки сигналов
Физические основы когерентной обработки сигналов Георгий Скребицкий. Весна
Георгий Скребицкий. Весна Назначение, размещение типы и классификация трансформаторных подстанций. Тема 10
Назначение, размещение типы и классификация трансформаторных подстанций. Тема 10 Таинства. Таинство крещения. Таинство миропомазания
Таинства. Таинство крещения. Таинство миропомазания Описание технологии проведения промывки, отжима и измельчения крошки каучука в цехе Е-2
Описание технологии проведения промывки, отжима и измельчения крошки каучука в цехе Е-2 ПРОБЛЕМЫ ТОЛЕРАНТНОСТИ В МИРОВОЙ ИСТОРИИ-ЛИТЕРАТУРА
ПРОБЛЕМЫ ТОЛЕРАНТНОСТИ В МИРОВОЙ ИСТОРИИ-ЛИТЕРАТУРА Байкал – жемчужина России
Байкал – жемчужина России Модернизация электропривода швейной машины челночной строчки
Модернизация электропривода швейной машины челночной строчки Военные походы фараонов
Военные походы фараонов 20180822_psihologicheskoe_soprovozhdenie_protsessa_obucheniya_v_usloviyah_priemstvennosti_shkola_-_detskiy_sad_-_3
20180822_psihologicheskoe_soprovozhdenie_protsessa_obucheniya_v_usloviyah_priemstvennosti_shkola_-_detskiy_sad_-_3 Праведный Стефан Знаменский
Праведный Стефан Знаменский Зашумлённый текст
Зашумлённый текст Презентация Microsoft Office PowerPoint
Презентация Microsoft Office PowerPoint Норма и вопрос в юридической теории и практике
Норма и вопрос в юридической теории и практике 172262685746922298.1.2
172262685746922298.1.2 LED factory how to make the bulb
LED factory how to make the bulb Обзор информационных ресурсов для изучения английского языка
Обзор информационных ресурсов для изучения английского языка Разработка модуля распознования дорожных знаков для системы технического зрения
Разработка модуля распознования дорожных знаков для системы технического зрения Приглашение на девичник
Приглашение на девичник Волшебный мир балета
Волшебный мир балета Живопись
Живопись Современные газопроводы подземной прокладки
Современные газопроводы подземной прокладки Моя школа. История школы
Моя школа. История школы