- Разработка модуля распознования дорожных знаков для системы технического зрения

Содержание
- 2. Цель исследования Целью данной выпускной квалификационной работы является разработка системы поддержки принятия решений при управлении транспортным
- 3. Актуальность данного исследования Дорожное движение существует во всех странах мира и наряду с положительными сторонами имеет
- 4. Объект и предмет исследования Объектом исследования являются технологии разработки систем принятия решений. Предмет исследования – методы
- 5. Общая архитектура существующих систем
- 6. Анализ существующих автоматизированных систем управления Интерфейс атопилота Tesla Наглядность работы датчиков на автомобиле компании Mercedes-Benz
- 7. Проектирование архитектуры системы Все требования к данному программному продукту можно разделить на функциональные и нефункциональные, а
- 8. Выбор модели нейронной сети и тестовых данных Архитектура сети CNN Блок схема симулятора привода
- 9. Структурная схема программы
- 10. Общий алгоритм работы системы
- 11. Выбор программных средств В данной работе использовались следующие программные средства:
- 12. Разработка и тестирование системы Оповещение о предстоящем впереди пешеходном переходе Оповещение о нарушении и генерация QR
- 13. Тестирование В результате тестирования оценивалось, какой процент времени нейронная сеть может управлять транспортным средством в режиме
- 15. Скачать презентацию
Цель исследования
Целью данной выпускной квалификационной работы является разработка системы поддержки принятия
Цель исследования
Целью данной выпускной квалификационной работы является разработка системы поддержки принятия
Актуальность данного исследования
Дорожное движение существует во всех странах мира и наряду
Актуальность данного исследования
Дорожное движение существует во всех странах мира и наряду
Объект и предмет исследования
Объектом исследования являются технологии разработки систем принятия решений.
Предмет
Объект и предмет исследования
Объектом исследования являются технологии разработки систем принятия решений.
Предмет
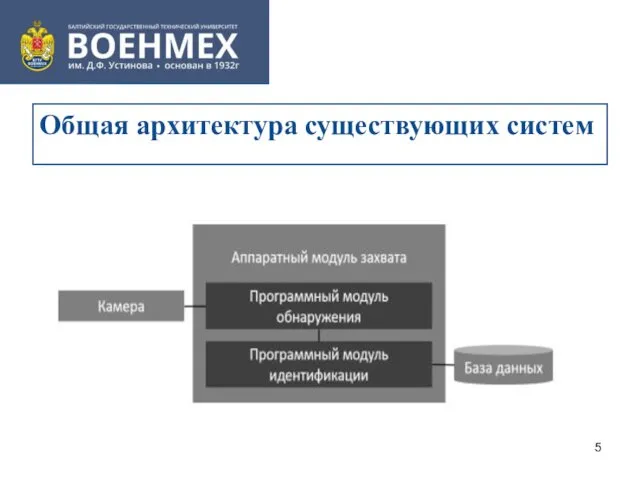
Общая архитектура существующих систем
Общая архитектура существующих систем

Анализ существующих автоматизированных систем управления
Интерфейс атопилота Tesla
Наглядность работы датчиков на автомобиле
Анализ существующих автоматизированных систем управления
Интерфейс атопилота Tesla
Наглядность работы датчиков на автомобиле
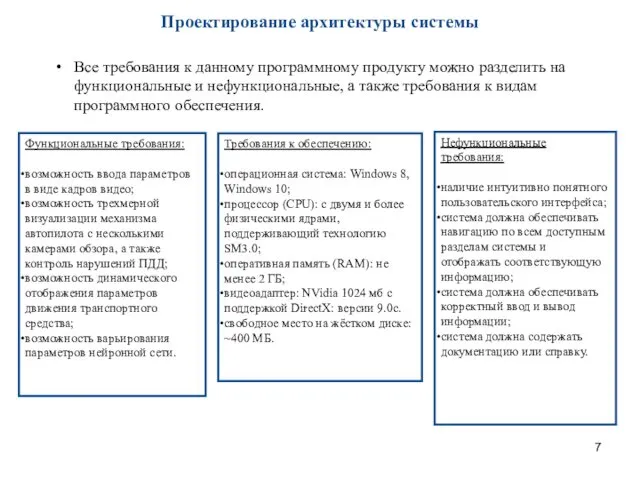
Проектирование архитектуры системы
Все требования к данному программному продукту можно разделить на
Проектирование архитектуры системы
Все требования к данному программному продукту можно разделить на
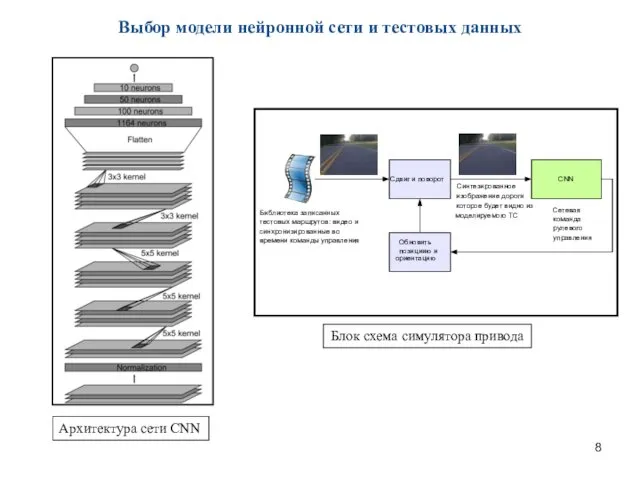
Выбор модели нейронной сети и тестовых данных
Архитектура сети CNN
Блок схема симулятора
Выбор модели нейронной сети и тестовых данных
Архитектура сети CNN
Блок схема симулятора

Структурная схема программы
Структурная схема программы
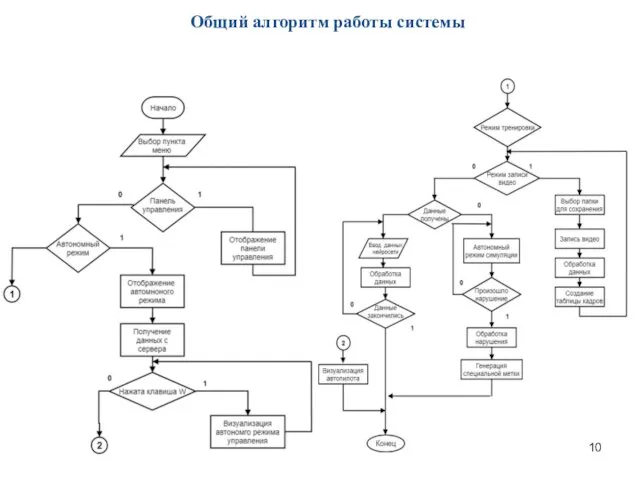
Общий алгоритм работы системы
Общий алгоритм работы системы
Выбор программных средств
В данной работе использовались следующие программные средства:
Выбор программных средств
В данной работе использовались следующие программные средства:

Разработка и тестирование системы
Оповещение о предстоящем впереди пешеходном переходе
Оповещение о нарушении
Разработка и тестирование системы
Оповещение о предстоящем впереди пешеходном переходе
Оповещение о нарушении
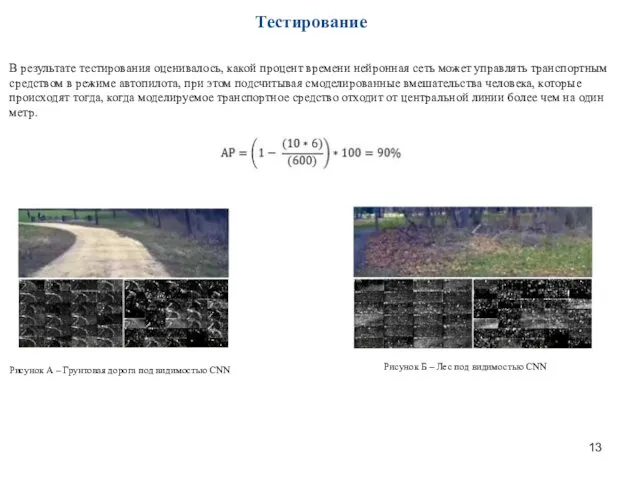
Тестирование
В результате тестирования оценивалось, какой процент времени нейронная сеть может управлять
Тестирование
В результате тестирования оценивалось, какой процент времени нейронная сеть может управлять
 августа 2020 года (1)
августа 2020 года (1) Основные требования к размещению и креплению грузов в вагонах и контейнерах
Основные требования к размещению и креплению грузов в вагонах и контейнерах пакеты РКО с деловым Максимумом (1)
пакеты РКО с деловым Максимумом (1) DASK Introduction
DASK Introduction Итоги работы в 2019 году организации ООО Донэнергопроммонтаж
Итоги работы в 2019 году организации ООО Донэнергопроммонтаж Закон единства и борьбы противоположностей
Закон единства и борьбы противоположностей Крым - моя малая родина
Крым - моя малая родина Собака моей мечты
Собака моей мечты Отчёт по производственной практике Основы аналитической химии и физико-химических методов анализа
Отчёт по производственной практике Основы аналитической химии и физико-химических методов анализа 20170602_prilozhenie_2
20170602_prilozhenie_2 Обґрунтування шляхів зменшення нагріву фаршу при його подрібненні в емульситаторІ
Обґрунтування шляхів зменшення нагріву фаршу при його подрібненні в емульситаторІ Госпрограмма Республики Коми по занятости на 2017
Госпрограмма Республики Коми по занятости на 2017 Прикосновенные лики Сибирских святых
Прикосновенные лики Сибирских святых Учет межконфессиональных отношений
Учет межконфессиональных отношений Материалы, используемые в сфере робототехники
Материалы, используемые в сфере робототехники 20170131_master-klass_na_konkurs
20170131_master-klass_na_konkurs Поздравление на день рождения
Поздравление на день рождения История создания ракет
История создания ракет Авіаційні логістичні центри
Авіаційні логістичні центри План-график работ_Хлопина_23-12-2014 (1)
План-график работ_Хлопина_23-12-2014 (1) Энергомодернизация зданий бюджетной сферы через механизм энергосервисных контрактов: опыт и перспективы проектов ЕБРР в Украине и России
Энергомодернизация зданий бюджетной сферы через механизм энергосервисных контрактов: опыт и перспективы проектов ЕБРР в Украине и России Antikoban Residence DLC Road to Etruria
Antikoban Residence DLC Road to Etruria Котлеты отбивные
Котлеты отбивные Технология производства электросварных труб
Технология производства электросварных труб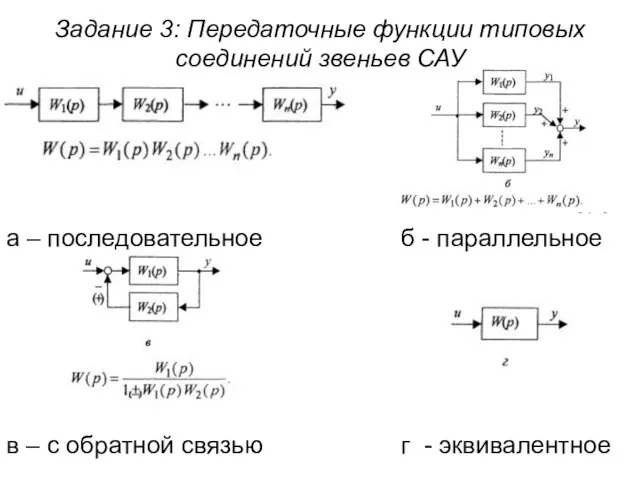 Передаточные функции типовых соединений звеньев САУ
Передаточные функции типовых соединений звеньев САУ stud-KET-distance_lesson-1_24_03_20
stud-KET-distance_lesson-1_24_03_20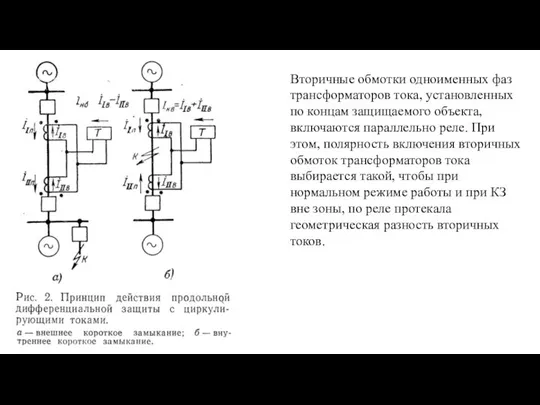 Вторичные обмотки одноименных фаз трансформаторов тока
Вторичные обмотки одноименных фаз трансформаторов тока Основные сведения о металлических конструкциях. Материалы для металлических конструкций
Основные сведения о металлических конструкциях. Материалы для металлических конструкций