- Интеллектуальная система автоведения грузового поезда с распределенной тягой ИСАВП-РТ

Содержание
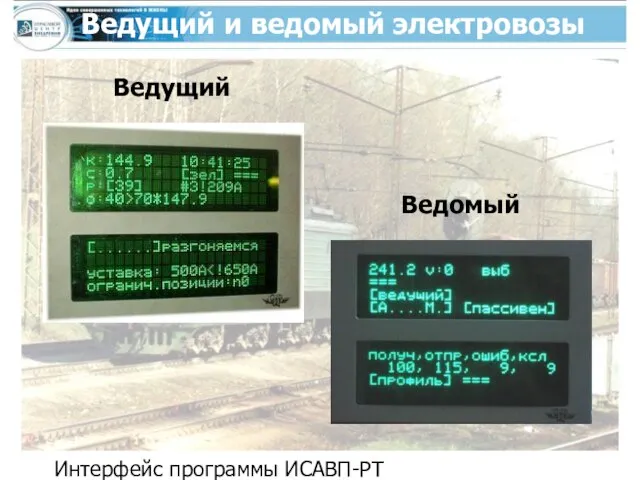
- 2. Интерфейс программы ИСАВП-РТ Ведущий и ведомый электровозы Ведущий Ведомый
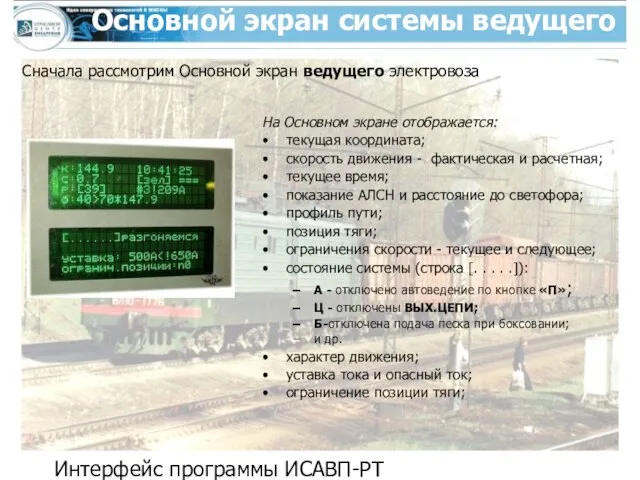
- 3. Интерфейс программы ИСАВП-РТ Основной экран системы ведущего На Основном экране отображается: текущая координата; скорость движения -
- 4. Интерфейс программы ИСАВП-РТ Текущая координата и скорость Текущая координата, км.пк Текущая скорость, км/ч Расчетная скорость, км/ч,
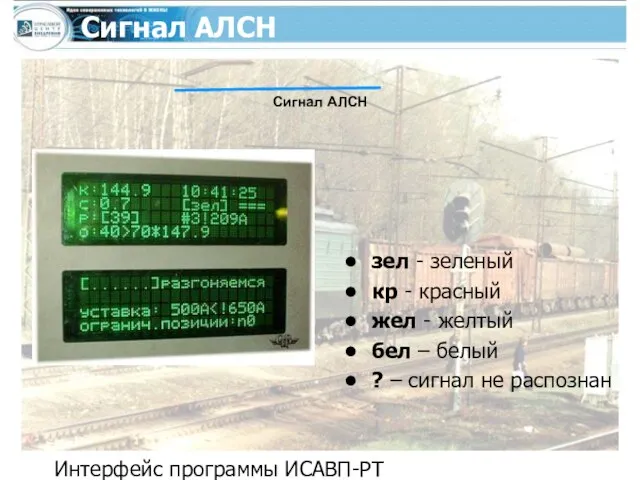
- 5. Интерфейс программы ИСАВП-РТ Сигнал АЛСН зел - зеленый кр - красный жел - желтый бел –
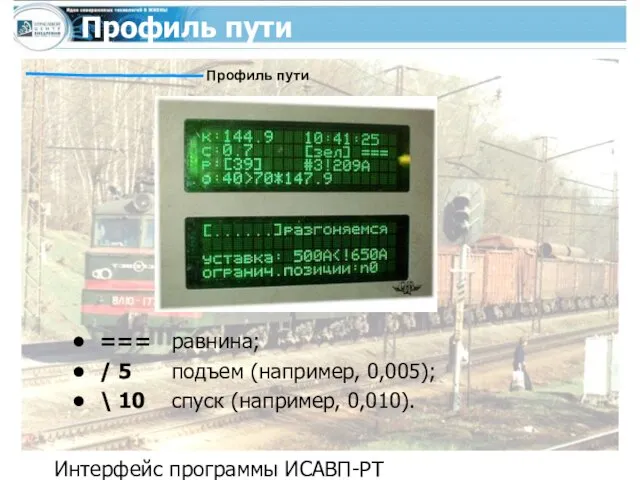
- 6. Интерфейс программы ИСАВП-РТ Профиль пути Профиль пути === равнина; / 5 подъем (например, 0,005); \ 10
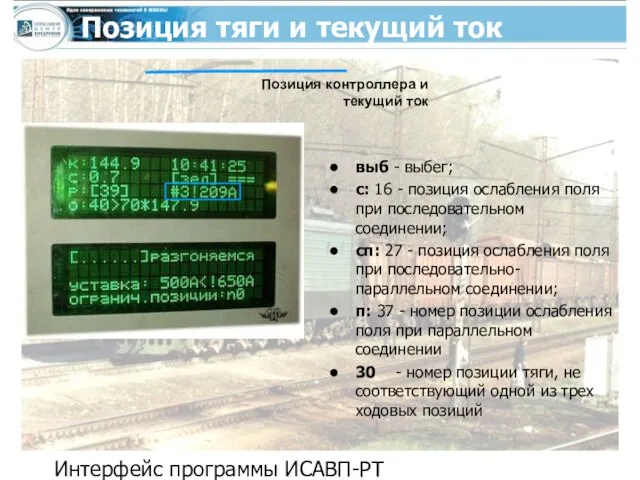
- 7. Интерфейс программы ИСАВП-РТ Позиция тяги и текущий ток выб - выбег; с: 16 - позиция ослабления
- 8. Интерфейс программы ИСАВП-РТ Уставка тока и максимальный ток Уставка тока – ток, при котором происходит переход
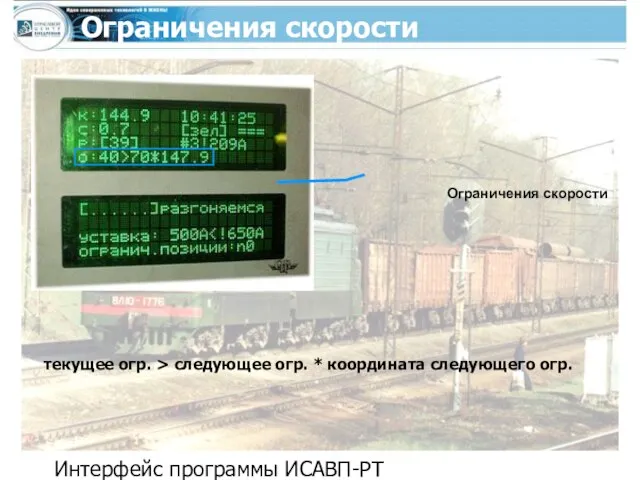
- 9. Интерфейс программы ИСАВП-РТ Ограничения скорости текущее огр. > следующее огр. * координата следующего огр. Ограничения скорости
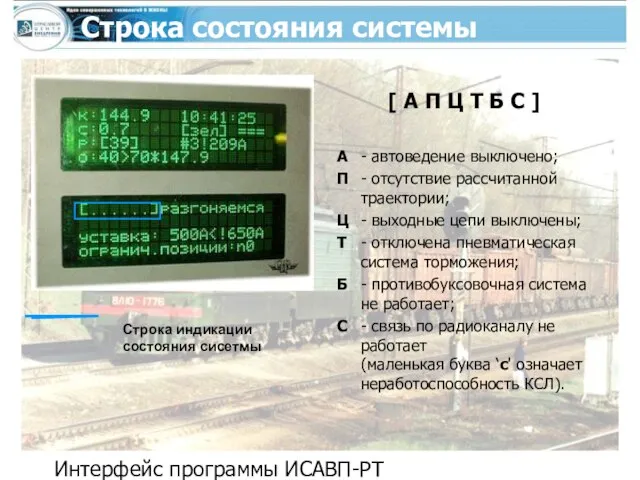
- 10. Интерфейс программы ИСАВП-РТ Строка состояния системы [ А П Ц Т Б С ] А -
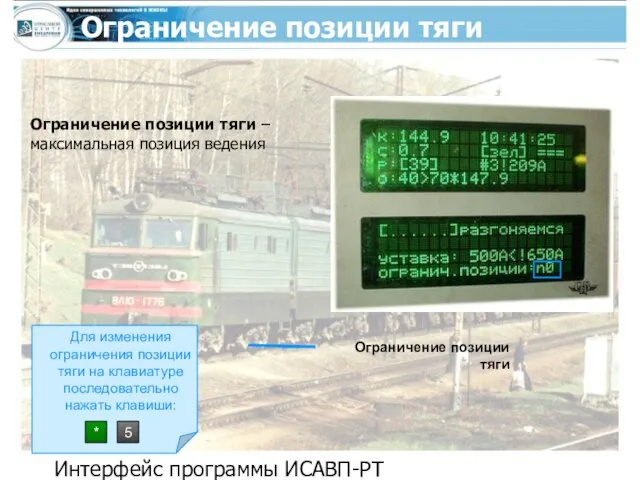
- 11. Интерфейс программы ИСАВП-РТ Ограничение позиции тяги Ограничение позиции тяги – максимальная позиция ведения Ограничение позиции тяги
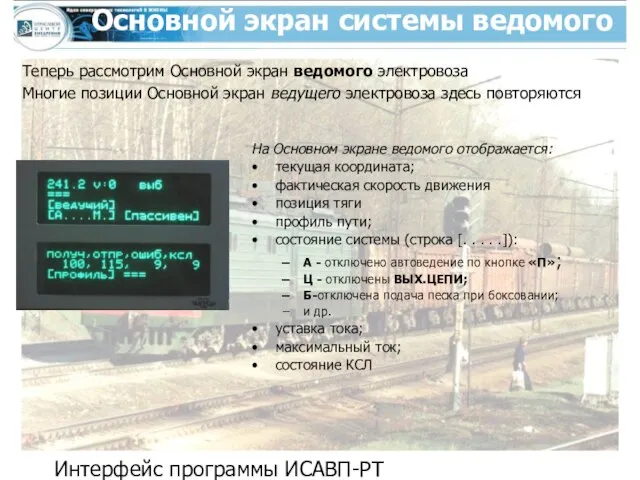
- 12. Интерфейс программы ИСАВП-РТ Основной экран системы ведомого На Основном экране ведомого отображается: текущая координата; фактическая скорость
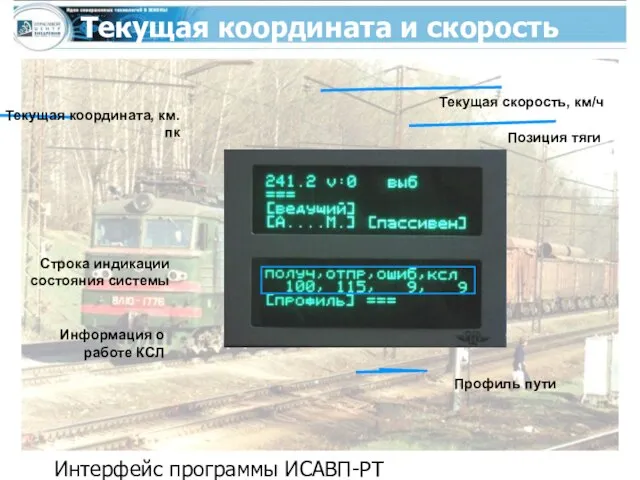
- 13. Интерфейс программы ИСАВП-РТ Текущая координата и скорость Текущая координата, км.пк Текущая скорость, км/ч Позиция тяги Строка
- 15. Скачать презентацию
Интерфейс программы ИСАВП-РТ
Ведущий и ведомый электровозы
Ведущий
Ведомый
Интерфейс программы ИСАВП-РТ
Ведущий и ведомый электровозы
Ведущий
Ведомый
Интерфейс программы ИСАВП-РТ
Основной экран системы ведущего
На Основном экране отображается:
текущая координата;
скорость движения
Интерфейс программы ИСАВП-РТ
Основной экран системы ведущего
На Основном экране отображается:
текущая координата;
скорость движения

Интерфейс программы ИСАВП-РТ
Текущая координата и скорость
Текущая координата, км.пк
Текущая скорость, км/ч
Расчетная скорость,
Интерфейс программы ИСАВП-РТ
Текущая координата и скорость
Текущая координата, км.пк
Текущая скорость, км/ч
Расчетная скорость,
Интерфейс программы ИСАВП-РТ
Сигнал АЛСН
зел - зеленый
кр - красный
жел - желтый
бел –
Интерфейс программы ИСАВП-РТ
Сигнал АЛСН
зел - зеленый
кр - красный
жел - желтый
бел –
Интерфейс программы ИСАВП-РТ
Профиль пути
Профиль пути
=== равнина;
/ 5 подъем (например, 0,005);
\ 10 спуск (например, 0,010).
Интерфейс программы ИСАВП-РТ
Профиль пути
Профиль пути
=== равнина;
/ 5 подъем (например, 0,005);
\ 10 спуск (например, 0,010).
Интерфейс программы ИСАВП-РТ
Позиция тяги и текущий ток
выб - выбег;
с: 16 -
Интерфейс программы ИСАВП-РТ
Позиция тяги и текущий ток
выб - выбег;
с: 16 -

Интерфейс программы ИСАВП-РТ
Уставка тока и максимальный ток
Уставка тока – ток, при
Интерфейс программы ИСАВП-РТ
Уставка тока и максимальный ток
Уставка тока – ток, при
Интерфейс программы ИСАВП-РТ
Ограничения скорости
текущее огр. > следующее огр. * координата следующего
Интерфейс программы ИСАВП-РТ
Ограничения скорости
текущее огр. > следующее огр. * координата следующего
Интерфейс программы ИСАВП-РТ
Строка состояния системы
[ А П Ц Т Б С
Интерфейс программы ИСАВП-РТ
Строка состояния системы
[ А П Ц Т Б С
Интерфейс программы ИСАВП-РТ
Ограничение позиции тяги
Ограничение позиции тяги – максимальная позиция ведения
Ограничение
Интерфейс программы ИСАВП-РТ
Ограничение позиции тяги
Ограничение позиции тяги – максимальная позиция ведения
Ограничение
Интерфейс программы ИСАВП-РТ
Основной экран системы ведомого
На Основном экране ведомого отображается:
текущая координата;
фактическая
Интерфейс программы ИСАВП-РТ
Основной экран системы ведомого
На Основном экране ведомого отображается:
текущая координата;
фактическая
Интерфейс программы ИСАВП-РТ
Текущая координата и скорость
Текущая координата, км.пк
Текущая скорость, км/ч
Позиция тяги
Строка
Интерфейс программы ИСАВП-РТ
Текущая координата и скорость
Текущая координата, км.пк
Текущая скорость, км/ч
Позиция тяги
Строка
 Липина Оксана, волейбол
Липина Оксана, волейбол Добро пожаловать в библейский колледж Харис!
Добро пожаловать в библейский колледж Харис! Декада мастерства. Конкурсы
Декада мастерства. Конкурсы Презентация (1)
Презентация (1) Нефтегазовая компания ОАО Лукойл
Нефтегазовая компания ОАО Лукойл Промышленное применение газовых тепловых насосов Tedom polo 100
Промышленное применение газовых тепловых насосов Tedom polo 100 Включения в рубинах
Включения в рубинах Типовые элементы систем автоматики
Типовые элементы систем автоматики Роль семьи в предупреждении и профилактике преступлений и правонарушений среди несовершеннолетних
Роль семьи в предупреждении и профилактике преступлений и правонарушений среди несовершеннолетних История большой любви
История большой любви Система сбора и накопления воды
Система сбора и накопления воды My family
My family Светлова Гайд по паллиативу
Светлова Гайд по паллиативу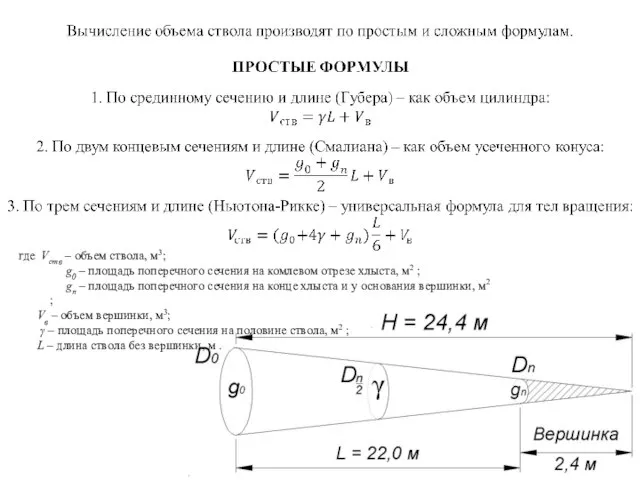 Вычисления объема ствола
Вычисления объема ствола Локомотивтердің тербелістерінің анықталуы және тербелістердің ерекшеліктері
Локомотивтердің тербелістерінің анықталуы және тербелістердің ерекшеліктері Правила пожарной безопасности
Правила пожарной безопасности 1000 € la passe, CHER OU PAS ?
1000 € la passe, CHER OU PAS ? Деятельность педагога-психолога ДОУ. Преодоление вызовов и рисков
Деятельность педагога-психолога ДОУ. Преодоление вызовов и рисков Система сбора и подготовки скважинной продукции. Система сбора скважинной продукции. Общие понятия и определения
Система сбора и подготовки скважинной продукции. Система сбора скважинной продукции. Общие понятия и определения Повышение эффективности деятельности местных органов власти по территориальному планированию (на примере Управы района Коньково)
Повышение эффективности деятельности местных органов власти по территориальному планированию (на примере Управы района Коньково) Интонация. Визуализации
Интонация. Визуализации Технология сварки плавящимся электродом в защитных газах. Кристаллизационные трещины в металле шва углеродистых сталей
Технология сварки плавящимся электродом в защитных газах. Кристаллизационные трещины в металле шва углеродистых сталей Об изменениях в схеме водоснабжения и водоотведения
Об изменениях в схеме водоснабжения и водоотведения 20151001_4_mpp
20151001_4_mpp Eesti keele kui teise keele riigieksamiks ettevalmistuskursus (gümnaasiumi aste)
Eesti keele kui teise keele riigieksamiks ettevalmistuskursus (gümnaasiumi aste) Свадебный бум
Свадебный бум ИСПОЛЬЗОВАНИЕ МЕДИАТЕХНОЛОГИЙ
ИСПОЛЬЗОВАНИЕ МЕДИАТЕХНОЛОГИЙ Nelson's Column
Nelson's Column