- Кинематический расчёт шагающего механизма (отработан грант УМНИК, заявка на грант СТАРТ-1)

Содержание
- 2. Кинематический расчёт шагающего механизма Скворцова Анастасия Андреевна моб. тел. 8-977-810-92-05, saa2509@mail.ru Московский авиационный институт (НИУ), 5
- 3. Четыре школьных шагохода Грант УМНИК 500.000 рублей Заявка на грант 2 млн.руб. СТАРТ-1 Ближайшая цель –
- 4. Суть работы Природная траектория стопы не изменилась со времён мамонтов и даже динозавров Ссылка на рисунки:
- 5. П.1. Анализ уровня технического развития медицинских и физкультурных тренажёров для реабилитации, восстановления, лечения, адаптации пациентов с
- 6. П.2. Разработка механической схемы лабораторного образца подвижного шагающего рефлекторного тренажёра. Календарный план 1-го этапа НИР Первая
- 7. Число степеней свободы: C=3m-2(n+v)= =27-2(4+9)= =27-26=1 m=9 рычагов, n=4 неподвижных шарнира, v=9 подвижных шарниров Применила формулу
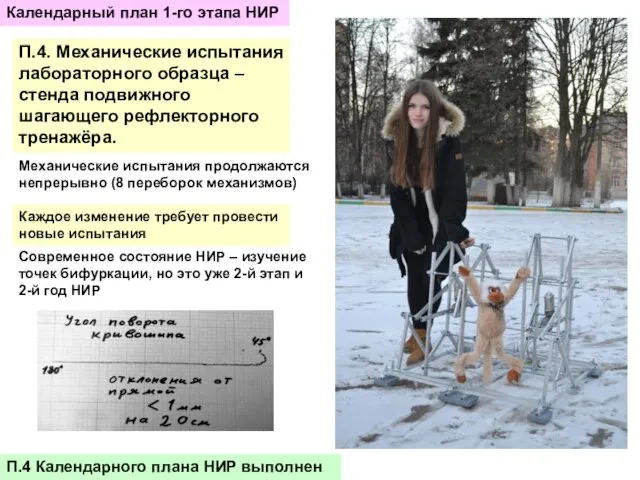
- 8. Календарный план 1-го этапа НИР П.4. Механические испытания лабораторного образца – стенда подвижного шагающего рефлекторного тренажёра.
- 9. П.5. Медицинские исследования лабораторного образца – стенда подвижного шагающего рефлекторного тренажёра. Календарный план 1-го этапа НИР
- 10. Календарный план 1-го этапа НИР П.6. Определение основных направлений совершенствования и доводки механической части лабораторного образца
- 11. Календарный план 1-го этапа НИР П.7. Определение основных направлений совершенствования и доводки медицинской части лабораторного образца
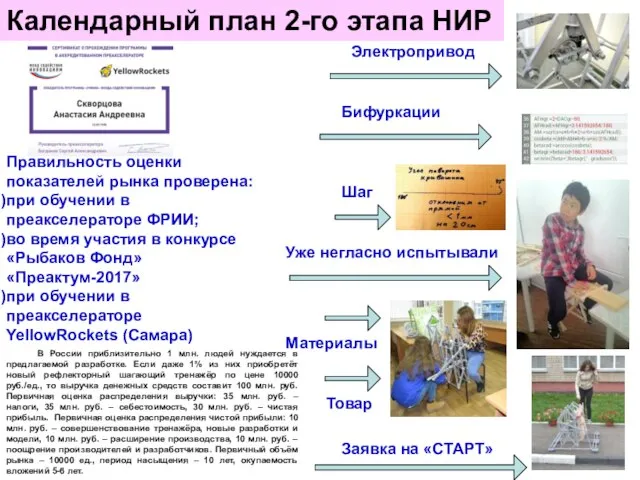
- 12. Календарный план 2-го этапа НИР Электропривод Бифуркации Шаг Уже негласно испытывали Материалы Заявка на «СТАРТ» Товар
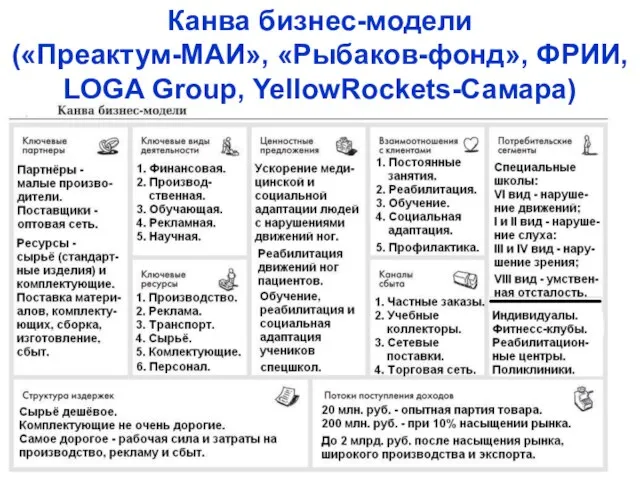
- 13. ~1500 школ х 4 тренажёра в школе х 30000 руб./тренажёр = 180 млн. руб. Оценка объёма
- 14. Канва бизнес-модели («Преактум-МАИ», «Рыбаков-фонд», ФРИИ, LOGA Group, YellowRockets-Самара)
- 15. Работа по гранту поддерживается Благотворительным фондом «Образование+». Договор о безвозмездной поддержке от 8 декабря 2016 года
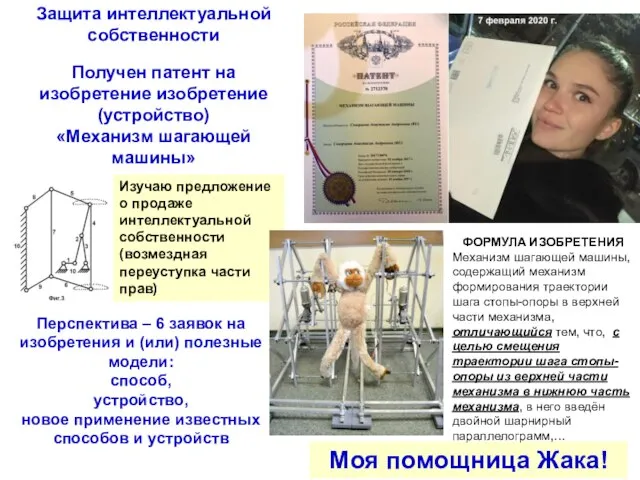
- 16. Защита интеллектуальной собственности Получен патент на изобретение изобретение (устройство) «Механизм шагающей машины» Перспектива – 6 заявок
- 17. Шагающий тренажёр для ребёнка (шаг 30 см) Видеоролик (11:42) https://youtu.be/ehMjOSe83tg
- 18. Активизация мозговых центров стационарным тренажёром Активизация мозговых центров шагающим тренажёром Выводы
- 19. Что-то пошло не так. Почему я здесь? Цель работы. Октябрь 2015 года, Санкт-Петербургский Политех, 10 класс,
- 21. Скачать презентацию

Кинематический расчёт шагающего механизма
Скворцова Анастасия Андреевна
моб. тел. 8-977-810-92-05, saa2509@mail.ru
Московский авиационный
Кинематический расчёт шагающего механизма
Скворцова Анастасия Андреевна
моб. тел. 8-977-810-92-05, saa2509@mail.ru
Московский авиационный

Четыре школьных шагохода
Грант УМНИК 500.000 рублей
Заявка на грант 2 млн.руб. СТАРТ-1
Ближайшая
Четыре школьных шагохода
Грант УМНИК 500.000 рублей
Заявка на грант 2 млн.руб. СТАРТ-1
Ближайшая

Суть работы
Природная траектория стопы не изменилась со времён мамонтов и даже
Суть работы
Природная траектория стопы не изменилась со времён мамонтов и даже

П.1. Анализ уровня технического развития медицинских и физкультурных тренажёров для реабилитации,
П.1. Анализ уровня технического развития медицинских и физкультурных тренажёров для реабилитации,
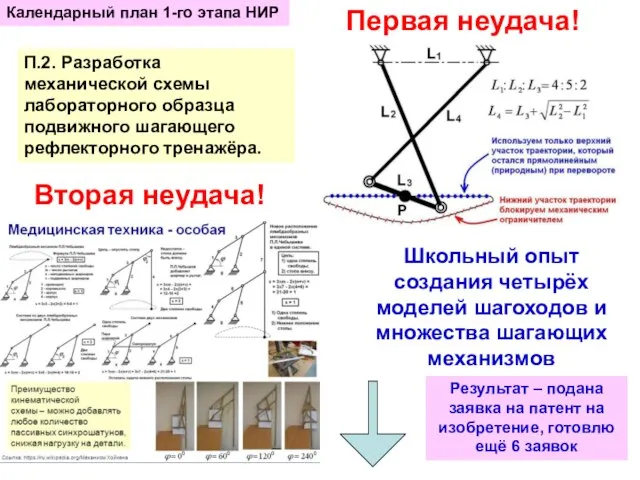
П.2. Разработка механической схемы лабораторного образца подвижного шагающего рефлекторного тренажёра.
Календарный план
П.2. Разработка механической схемы лабораторного образца подвижного шагающего рефлекторного тренажёра.
Календарный план

Число степеней свободы:
C=3m-2(n+v)=
=27-2(4+9)=
=27-26=1
m=9 рычагов,
n=4 неподвижных шарнира,
v=9 подвижных шарниров
Применила
Число степеней свободы:
C=3m-2(n+v)=
=27-2(4+9)=
=27-26=1
m=9 рычагов,
n=4 неподвижных шарнира,
v=9 подвижных шарниров
Применила
Календарный план 1-го этапа НИР
П.4. Механические испытания лабораторного образца – стенда
Календарный план 1-го этапа НИР
П.4. Механические испытания лабораторного образца – стенда

П.5. Медицинские исследования лабораторного образца – стенда подвижного шагающего рефлекторного тренажёра.
Календарный
П.5. Медицинские исследования лабораторного образца – стенда подвижного шагающего рефлекторного тренажёра.
Календарный

Календарный план 1-го этапа НИР
П.6. Определение основных направлений совершенствования и доводки
Календарный план 1-го этапа НИР
П.6. Определение основных направлений совершенствования и доводки

Календарный план 1-го этапа НИР
П.7. Определение основных направлений совершенствования и доводки
Календарный план 1-го этапа НИР
П.7. Определение основных направлений совершенствования и доводки
Календарный план 2-го этапа НИР
Электропривод
Бифуркации
Шаг
Уже негласно испытывали
Материалы
Заявка на «СТАРТ»
Товар
Правильность оценки показателей
Календарный план 2-го этапа НИР
Электропривод
Бифуркации
Шаг
Уже негласно испытывали
Материалы
Заявка на «СТАРТ»
Товар
Правильность оценки показателей
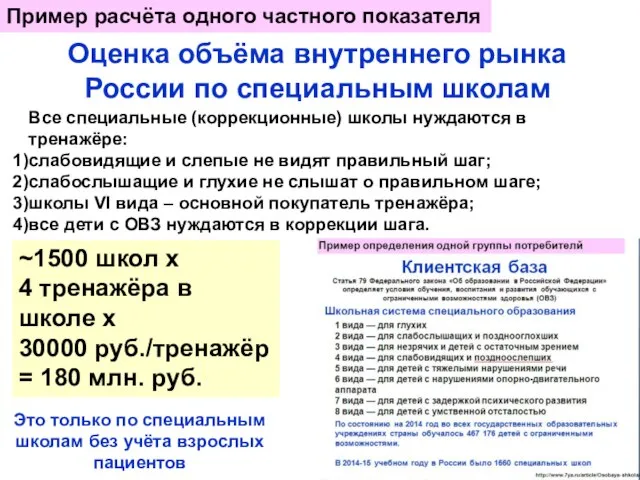
~1500 школ х
4 тренажёра в школе х
30000 руб./тренажёр =
~1500 школ х
4 тренажёра в школе х
30000 руб./тренажёр =
Канва бизнес-модели
(«Преактум-МАИ», «Рыбаков-фонд», ФРИИ, LOGA Group, YellowRockets-Самара)
Канва бизнес-модели
(«Преактум-МАИ», «Рыбаков-фонд», ФРИИ, LOGA Group, YellowRockets-Самара)
Работа по гранту поддерживается Благотворительным фондом «Образование+».
Договор о безвозмездной поддержке
Работа по гранту поддерживается Благотворительным фондом «Образование+».
Договор о безвозмездной поддержке
Защита интеллектуальной собственности
Получен патент на изобретение изобретение (устройство)
«Механизм шагающей машины»
Перспектива –
Защита интеллектуальной собственности
Получен патент на изобретение изобретение (устройство)
«Механизм шагающей машины»
Перспектива –
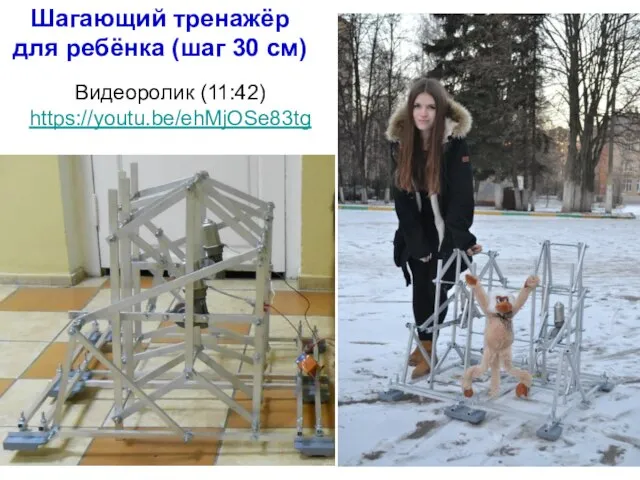
Шагающий тренажёр для ребёнка (шаг 30 см)
Видеоролик (11:42)
https://youtu.be/ehMjOSe83tg
Шагающий тренажёр для ребёнка (шаг 30 см)
Видеоролик (11:42)
https://youtu.be/ehMjOSe83tg
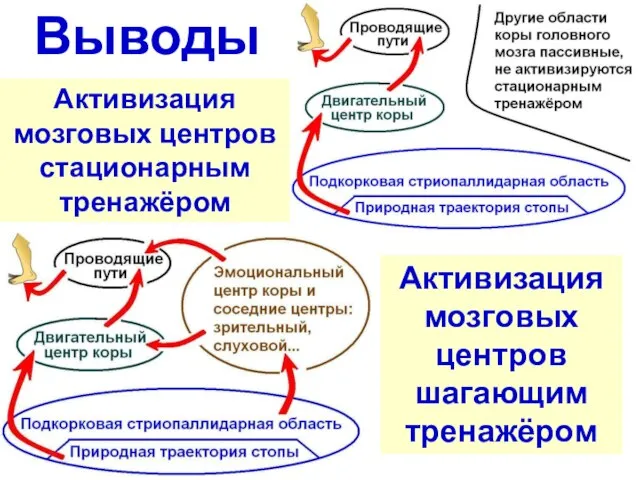
Активизация мозговых центров стационарным тренажёром
Активизация мозговых центров шагающим тренажёром
Выводы
Активизация мозговых центров стационарным тренажёром
Активизация мозговых центров шагающим тренажёром
Выводы
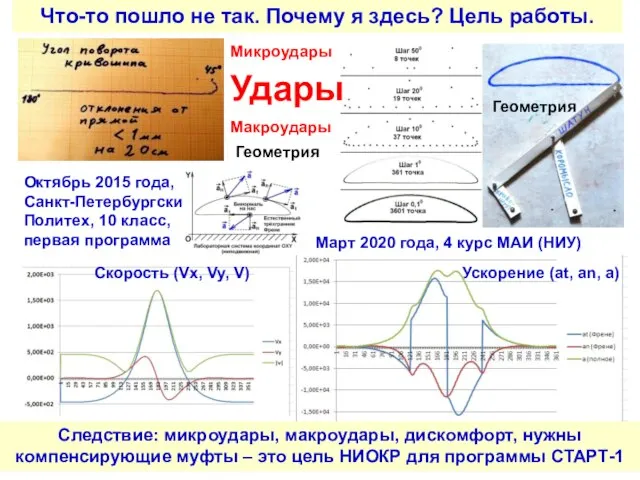
Что-то пошло не так. Почему я здесь? Цель работы.
Октябрь 2015 года,
Что-то пошло не так. Почему я здесь? Цель работы.
Октябрь 2015 года,
Похожие презентации
 Инженерно-гидрометеорологические изыскания Тема 7. Изыскания линий электропередач (ЛЭП)
Инженерно-гидрометеорологические изыскания Тема 7. Изыскания линий электропередач (ЛЭП) 20180304_na_puti_k_zhiznennomu_uspekhu
20180304_na_puti_k_zhiznennomu_uspekhu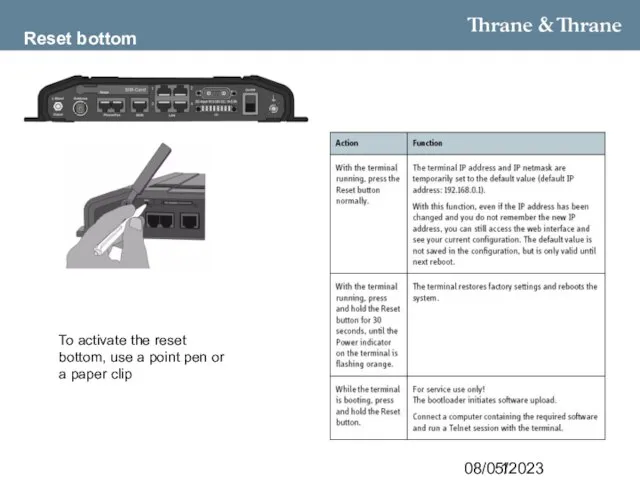 Reset bottom
Reset bottom Дружба с миром есть вражда против Бога
Дружба с миром есть вражда против Бога Actyon D20DT Engine
Actyon D20DT Engine Лесная прогулка
Лесная прогулка инструкция по МО (1) (1)
инструкция по МО (1) (1) 20141213_kultura_drevnego_egipta
20141213_kultura_drevnego_egipta Trimiteri Interne Trimiterile poștale interne sunt
Trimiteri Interne Trimiterile poștale interne sunt
 Угадай эмоции
Угадай эмоции По страницам любимых сказок
По страницам любимых сказок Алгоритмизация линейных, разветвляющихся и циклических алгоритмов
Алгоритмизация линейных, разветвляющихся и циклических алгоритмов Идент и аутентV3
Идент и аутентV3 Герои Великой Отечественной Войны
Герои Великой Отечественной Войны Машина резки труб ТРЕК-2М
Машина резки труб ТРЕК-2М Получение нутриентов методами биотехнологии
Получение нутриентов методами биотехнологии Знатоки Урала
Знатоки Урала Коллаж мамочка с днем рождения
Коллаж мамочка с днем рождения 20120217_vtoraya_mirovaya_voyna
20120217_vtoraya_mirovaya_voyna 20130421_baba_yaga
20130421_baba_yaga 20121228_koz-moyo2
20121228_koz-moyo2 кл.1 урок
кл.1 урок Фотоальбом
Фотоальбом гармония земля
гармония земля Respond & Achieve. Цифровая транкинговая система Hytera XPT
Respond & Achieve. Цифровая транкинговая система Hytera XPT Фрезерные приспособления
Фрезерные приспособления Arterial hypertension
Arterial hypertension