- Маятниковые позиционные акселерометры

Содержание
- 2. Акселерометрами называются устройства для измерения составляющих кажущегося линейного ускорения подвижных объектов на соответствующим образом выбранные направления.
- 3. К гравитационным силам относятся силы притяжения объекта Землей, Луной, Солнцем и другими небесными телами. Акселерометры, действие
- 4. Принципиальная схема измерений с помощью силового акселерометра Пусть опорное тело массой m связано с корпусом пружиной
- 5. Приложим к корпусу объекта силу , под действием которой он будет двигаться согласно второму закону Ньютона,
- 6. После окончания переходного процесса объект и тело m будут двигаться как единое целое с одинаковым ускорением:
- 7. Следовательно, измеряя вектор силы (например по деформации пружины), можно в масштабе определить вектор активной силы ,
- 8. по количеству степеней свободы перемещения инерционной массы относительно корпуса (одномерные, двумерные и трехмерные); по характеру зависимости
- 9. по виду выходных сигналов (механические, у которых выходной сигнал получается в виде перемещений; электрические – с
- 14. АКСЕЛЕРОМЕТР МАЯТНИКОВОГО ТИПА Рис.2.
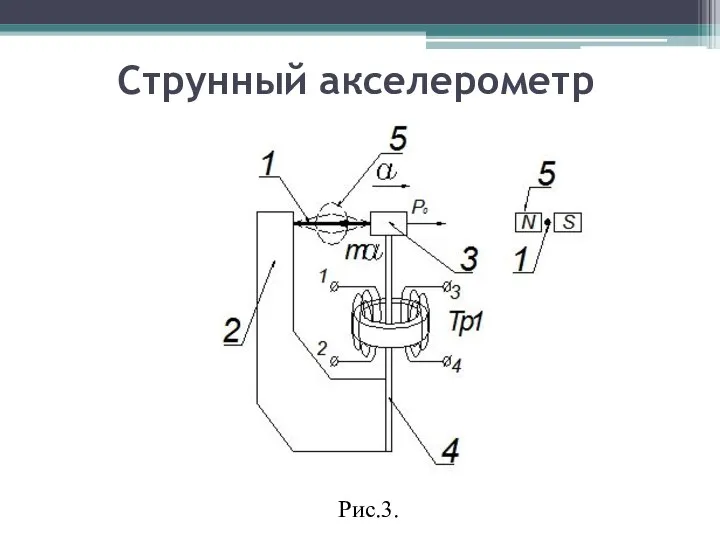
- 16. Струнный акселерометр Рис.3.
- 17. Струна 1 скреплена концами с кронштейном 2 и инерционной массой — грузом 3. Начальное натяжение создается
- 18. Рис. 4
- 19. Принцип действия струнного акселерометра. Струнный акселерометр предназначен для измерения величины проекции кажущегося линейного ускорения объекта на
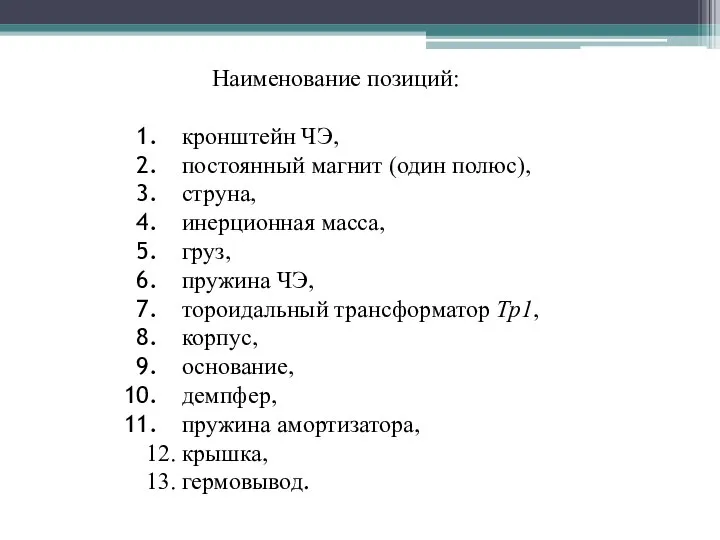
- 23. Рис.5.
- 24. Наименование позиций: кронштейн ЧЭ, постоянный магнит (один полюс), струна, инерционная масса, груз, пружина ЧЭ, тороидальный трансформатор
- 34. Скачать презентацию
Акселерометрами называются устройства для измерения
составляющих кажущегося линейного ускорения подвижных объектов
Акселерометрами называются устройства для измерения
составляющих кажущегося линейного ускорения подвижных объектов
К гравитационным силам относятся силы притяжения объекта Землей, Луной, Солнцем
К гравитационным силам относятся силы притяжения объекта Землей, Луной, Солнцем
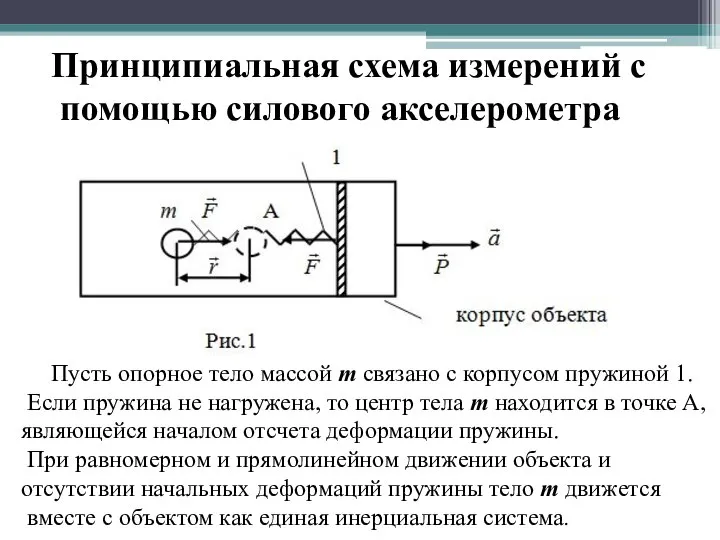
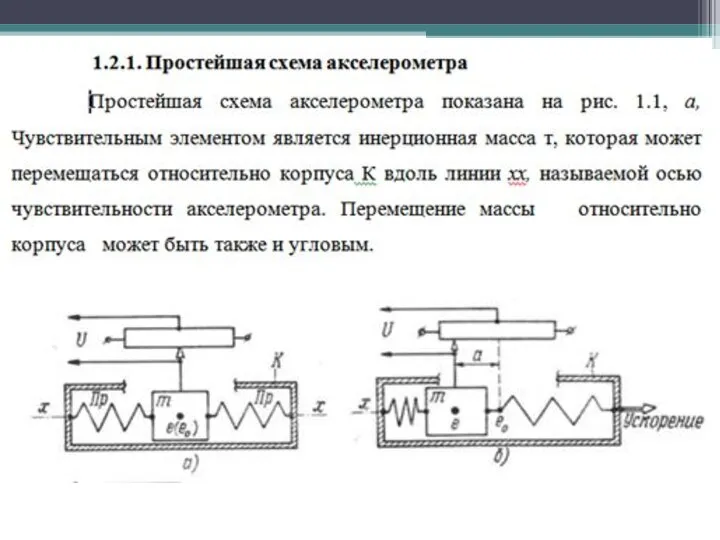
Принципиальная схема измерений с
помощью силового акселерометра
Пусть опорное тело массой
Принципиальная схема измерений с
помощью силового акселерометра
Пусть опорное тело массой
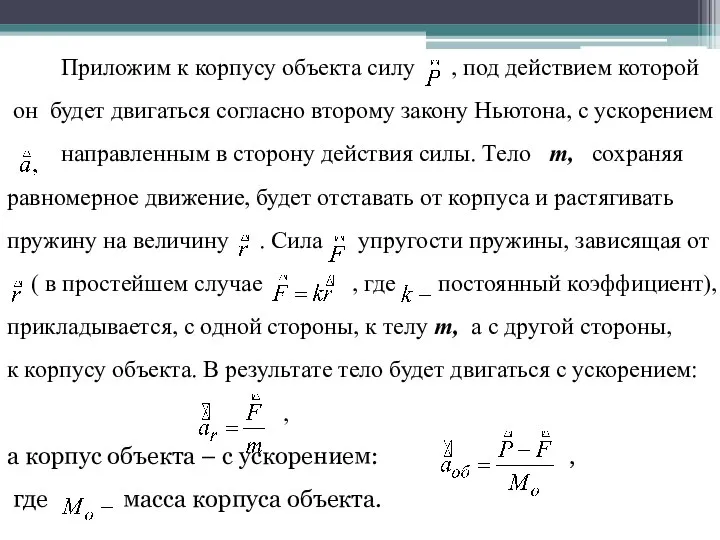
Приложим к корпусу объекта силу , под действием которой
он
Приложим к корпусу объекта силу , под действием которой
он
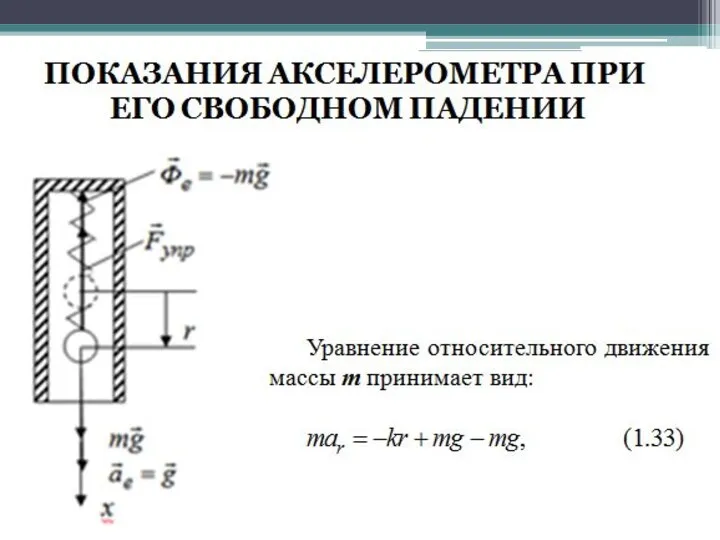
После окончания переходного процесса объект и тело m будут двигаться
После окончания переходного процесса объект и тело m будут двигаться
Следовательно, измеряя вектор силы (например по
деформации пружины), можно в
Следовательно, измеряя вектор силы (например по
деформации пружины), можно в
по количеству степеней свободы перемещения инерционной массы относительно корпуса (одномерные, двумерные
по количеству степеней свободы перемещения инерционной массы относительно корпуса (одномерные, двумерные
по виду выходных сигналов (механические, у которых выходной сигнал получается в
по виду выходных сигналов (механические, у которых выходной сигнал получается в
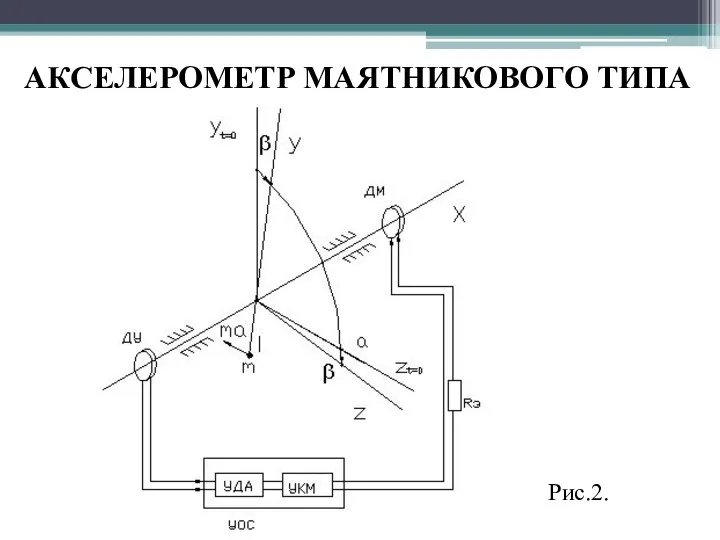
АКСЕЛЕРОМЕТР МАЯТНИКОВОГО ТИПА
Рис.2.
АКСЕЛЕРОМЕТР МАЯТНИКОВОГО ТИПА
Рис.2.
Струнный акселерометр
Рис.3.
Струнный акселерометр
Рис.3.
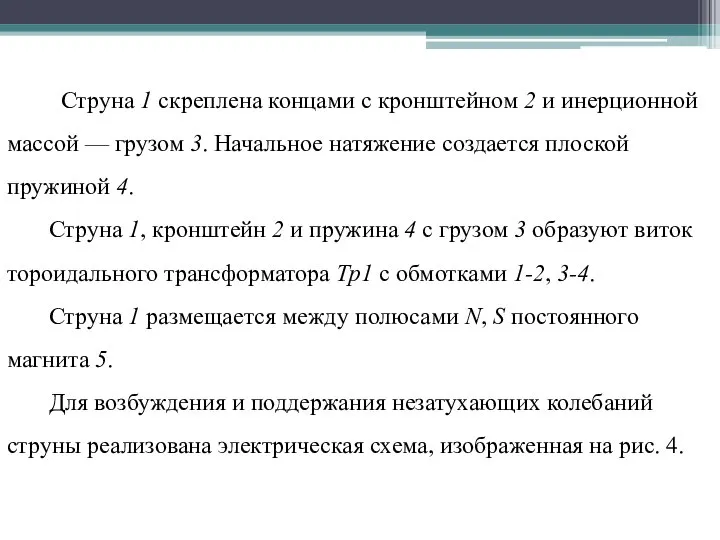
Струна 1 скреплена концами с кронштейном 2 и инерционной
массой
Струна 1 скреплена концами с кронштейном 2 и инерционной
массой
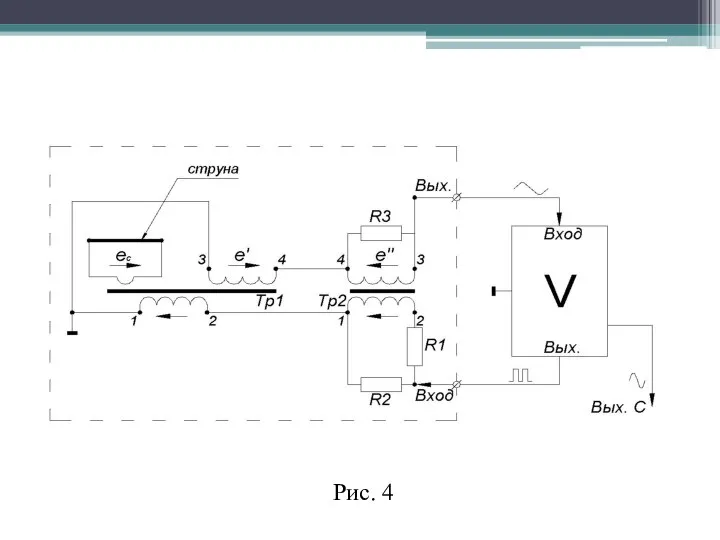
Рис. 4
Рис. 4
Принцип действия струнного акселерометра.
Струнный акселерометр предназначен для измерения величины
проекции кажущегося
Принцип действия струнного акселерометра.
Струнный акселерометр предназначен для измерения величины
проекции кажущегося
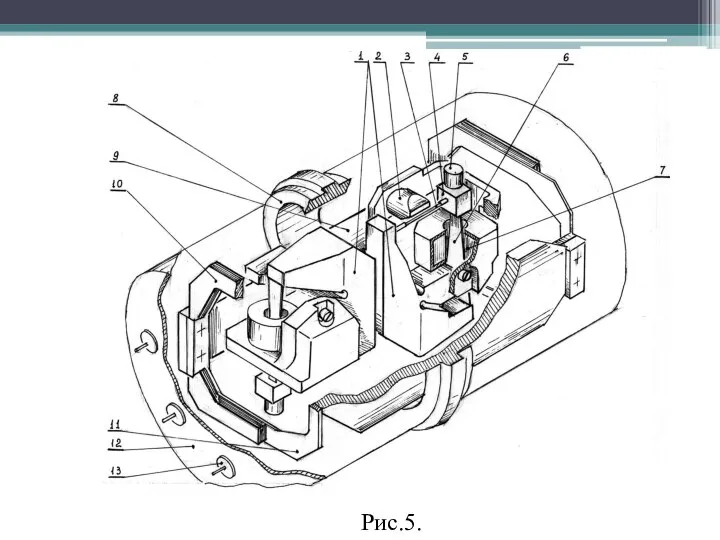
Рис.5.
Рис.5.
Наименование позиций:
кронштейн ЧЭ,
постоянный магнит (один полюс),
струна,
инерционная масса,
груз,
пружина ЧЭ,
тороидальный трансформатор Тр1,
корпус,
основание,
демпфер,
пружина
Наименование позиций:
кронштейн ЧЭ,
постоянный магнит (один полюс),
струна,
инерционная масса,
груз,
пружина ЧЭ,
тороидальный трансформатор Тр1,
корпус,
основание,
демпфер,
пружина
 20150621_prezentatsiya1
20150621_prezentatsiya1 Производство топливных брикетов (евродров)
Производство топливных брикетов (евродров) Компьютерные мышки
Компьютерные мышки Дидактическая игра Назови и расскажи о главных православных праздниках
Дидактическая игра Назови и расскажи о главных православных праздниках Особливості годівлі водоплавних птахів
Особливості годівлі водоплавних птахів Презентация
Презентация Буклет и особенности его подготовки
Буклет и особенности его подготовки угадай кто старшая подготовительная группа
угадай кто старшая подготовительная группа Apache Drums (Western 1951). Фабула или краткий пересказ
Apache Drums (Western 1951). Фабула или краткий пересказ Производство портальных машин термической, газокислородной и лазерной резки металла
Производство портальных машин термической, газокислородной и лазерной резки металла Что же такое – послушание?
Что же такое – послушание? Классификация, устройство и характерные неисправности поршневых компрессоров
Классификация, устройство и характерные неисправности поршневых компрессоров презентация питон1
презентация питон1 ИЗО, Буквица
ИЗО, Буквица Ситуативный метод
Ситуативный метод Клуб весёлых и находчивых Чувашии
Клуб весёлых и находчивых Чувашии Виды работ по производственной практике
Виды работ по производственной практике Урок 2
Урок 2 Методика тестирования аппаратной части ПК
Методика тестирования аппаратной части ПК Солнечная батарея и ее применение
Солнечная батарея и ее применение Мытье головы
Мытье головы Профессия пожарный
Профессия пожарный Роль техники в жизни человека
Роль техники в жизни человека Крестовые Походы
Крестовые Походы Автобусные кондиционеры
Автобусные кондиционеры 20111102_pritcha_o_care
20111102_pritcha_o_care 20160105_prezentatsiya1.ppt_platonov
20160105_prezentatsiya1.ppt_platonov Киров ЛЕН Синяя герань
Киров ЛЕН Синяя герань