- Модуль технической (специальной) подготовки

Содержание
- 2. Основы радионавигации и средства радиотехнического обеспечения полетов авиации ТЕМА №3 Основные понятия радионавигации Порядок изучения темы:
- 3. Способы определения местоположения ЛА Введение Основой успешного самолетовождения является комплексное применение технических средств, которое заключается в
- 4. Способы определения местоположения ЛА. Для определения местоположения ЛА в навигации применяются следующие способы: способ линий (поверхностей)
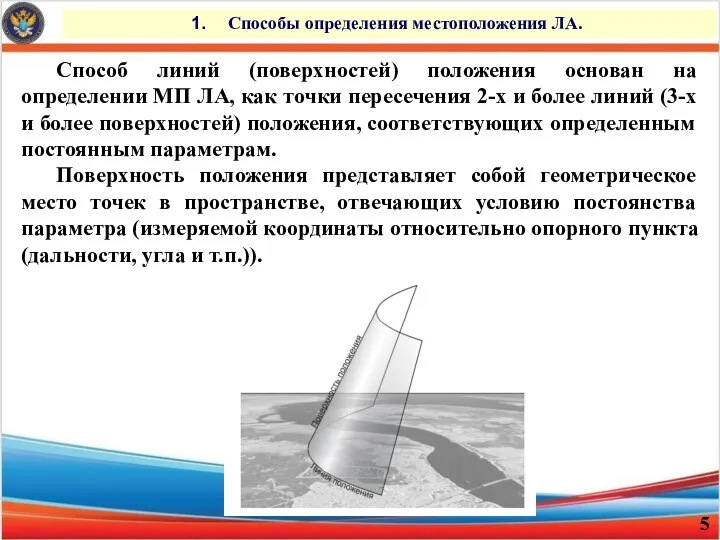
- 5. Способы определения местоположения ЛА. Способ линий (поверхностей) положения основан на определении МП ЛА, как точки пересечения
- 6. Способы определения местоположения ЛА. Если наклонная дальность до ЛА в 10 и более раз превышает его
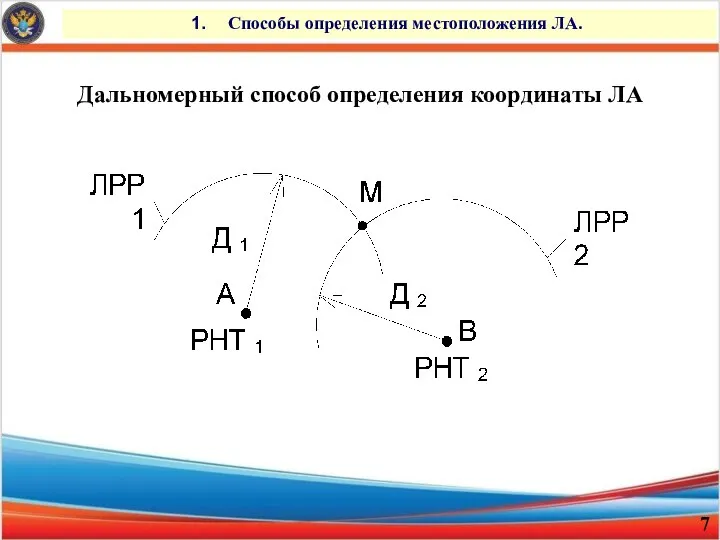
- 7. Способы определения местоположения ЛА. Дальномерный способ определения координаты ЛА
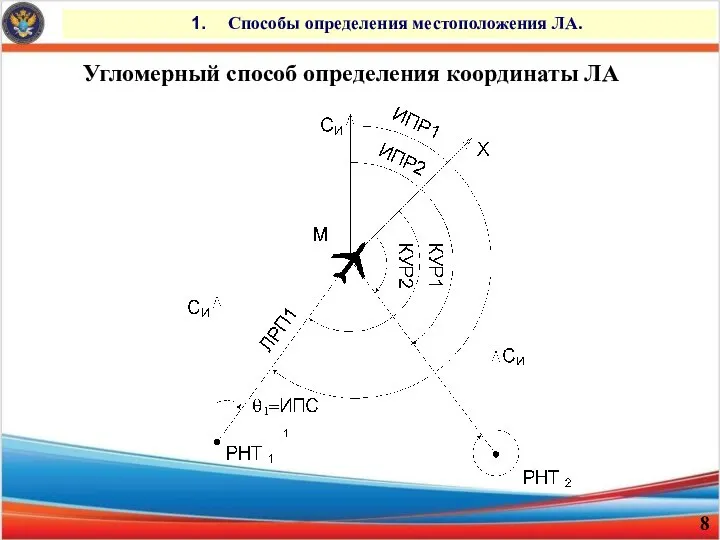
- 8. Способы определения местоположения ЛА. Угломерный способ определения координаты ЛА
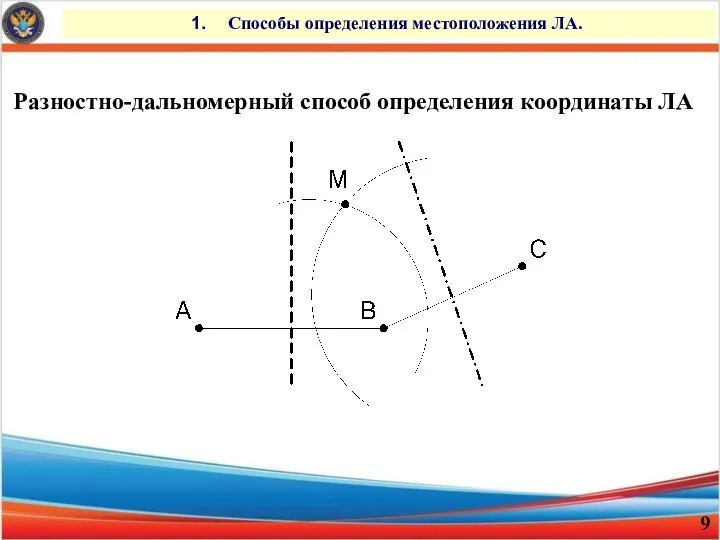
- 9. Способы определения местоположения ЛА. Разностно-дальномерный способ определения координаты ЛА
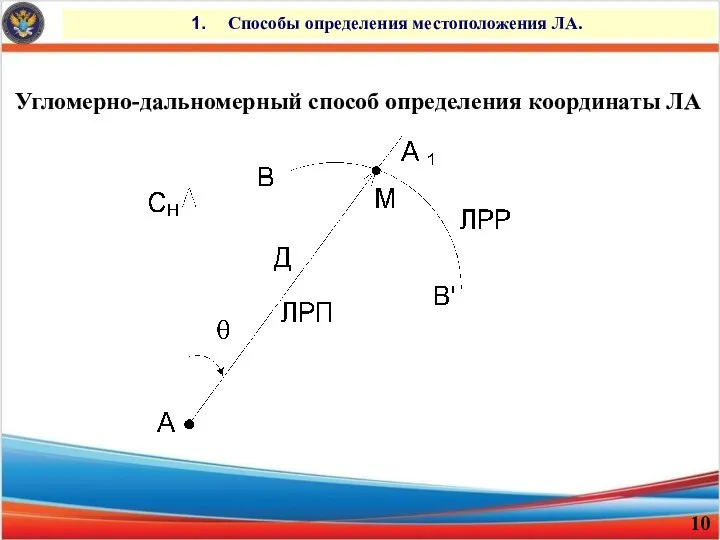
- 10. Способы определения местоположения ЛА. Угломерно-дальномерный способ определения координаты ЛА
- 11. Способы определения местоположения ЛА. Все эти виды определения МП ЛА способом линий положения требуют нескольких неподвижных
- 12. Способы определения местоположения ЛА. Счислением пути называется способ определения координат МП ЛА, основанный на вычислении пройденного
- 13. Классификация радионавигационных устройств и систем. Основными классификационными признаками РНС являются: 1) назначение – глобальные РНС; РНС
- 14. Классификация радионавигационных устройств и систем. РНС можно подразделять по некоторым другим признакам: ∙ по способам определения
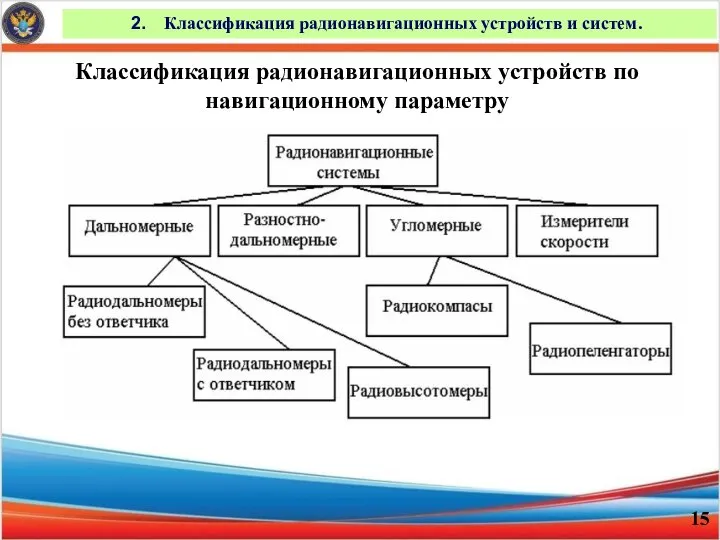
- 15. Классификация радионавигационных устройств и систем. Классификация радионавигационных устройств по навигационному параметру
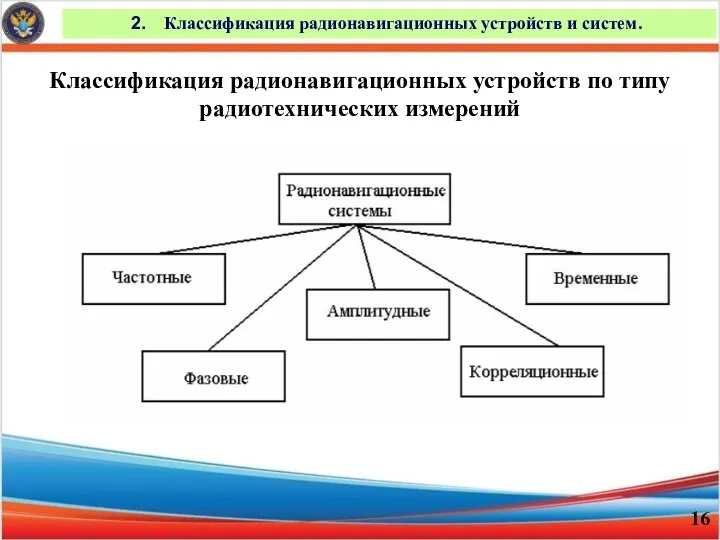
- 16. Классификация радионавигационных устройств и систем. Классификация радионавигационных устройств по типу радиотехнических измерений
- 17. Классификация радионавигационных устройств и систем. Основная цель создания КСН состоит в достижении наивысшей точности и надежности
- 18. Принцип привода ЛА на аэродром с использованием радионавигационных устройств. Принцип работы радиокомпаса основан на направленном приеме
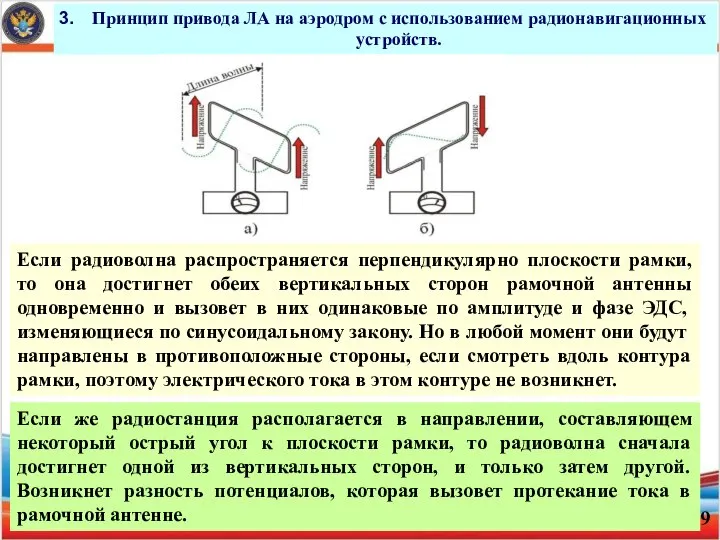
- 19. Принцип привода ЛА на аэродром с использованием радионавигационных устройств. Если радиоволна распространяется перпендикулярно плоскости рамки, то
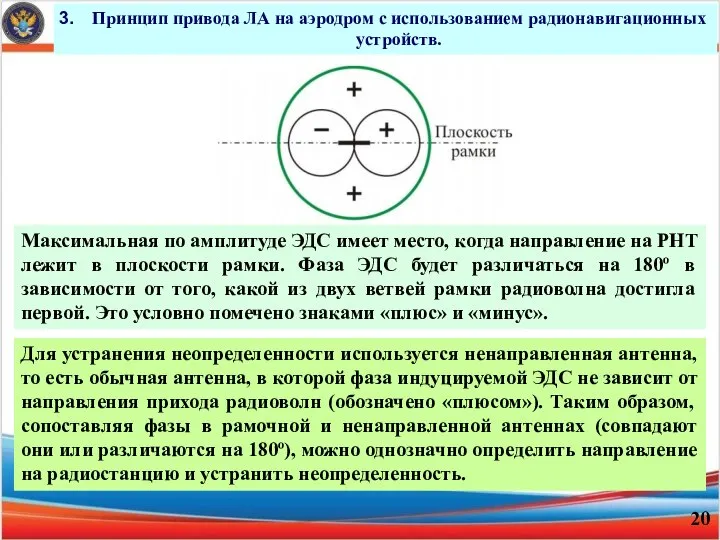
- 20. Принцип привода ЛА на аэродром с использованием радионавигационных устройств. Максимальная по амплитуде ЭДС имеет место, когда
- 21. Принцип привода ЛА на аэродром с использованием радионавигационных устройств. Упрощенная схема АРК С помощью АРК определяется
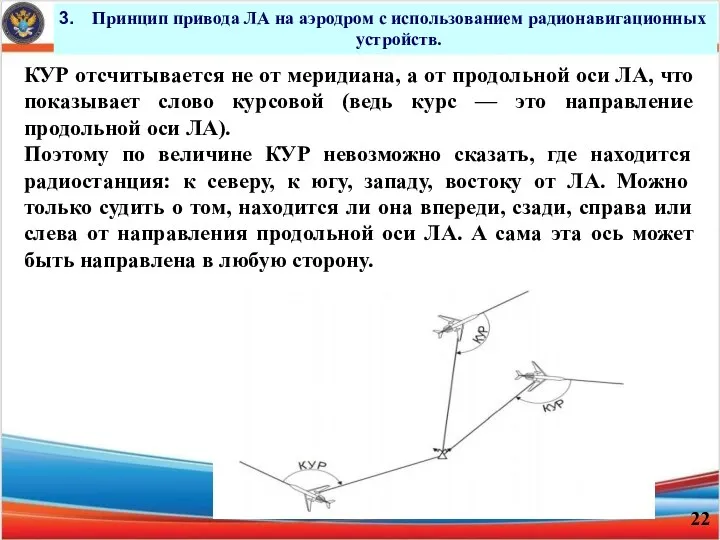
- 22. Принцип привода ЛА на аэродром с использованием радионавигационных устройств. КУР отсчитывается не от меридиана, а от
- 23. Принцип привода ЛА на аэродром с использованием радионавигационных устройств. Во внеаэродромном воздушном пространстве (на воздушных трассах)
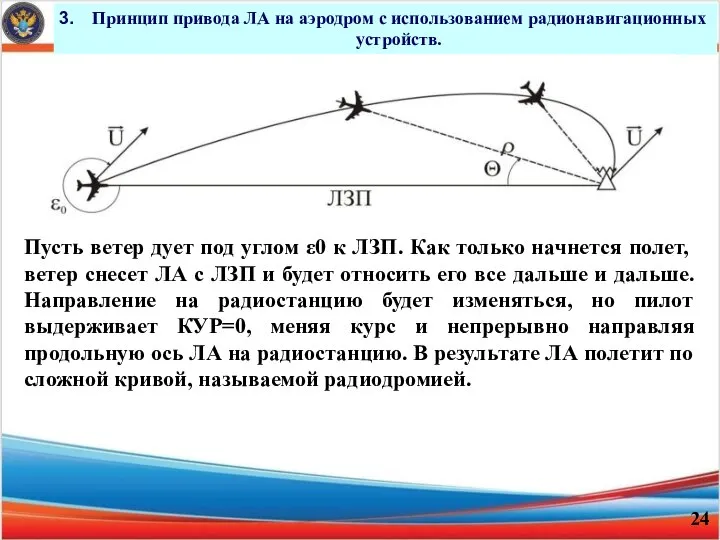
- 24. Принцип привода ЛА на аэродром с использованием радионавигационных устройств. Пусть ветер дует под углом ε0 к
- 25. Принцип привода ЛА на аэродром с использованием радионавигационных устройств. Курсовой способ является более удобной для пилота
- 26. Принцип привода ЛА на аэродром с использованием радионавигационных устройств. Активный полет на и от радиостанции заключается
- 28. Скачать презентацию
Основы радионавигации и средства радиотехнического обеспечения полетов авиации
ТЕМА №3
Основные понятия радионавигации
Порядок
Основы радионавигации и средства радиотехнического обеспечения полетов авиации
ТЕМА №3
Основные понятия радионавигации
Порядок
Способы определения местоположения ЛА
Введение
Основой успешного самолетовождения является комплексное применение технических средств,
Способы определения местоположения ЛА
Введение
Основой успешного самолетовождения является комплексное применение технических средств,
Способы определения местоположения ЛА.
Для определения местоположения ЛА в навигации применяются
Способы определения местоположения ЛА.
Для определения местоположения ЛА в навигации применяются
Способы определения местоположения ЛА.
Способ линий (поверхностей) положения основан на определении
Способы определения местоположения ЛА.
Способ линий (поверхностей) положения основан на определении
Способы определения местоположения ЛА.
Если наклонная дальность до ЛА в 10
Способы определения местоположения ЛА.
Если наклонная дальность до ЛА в 10
Способы определения местоположения ЛА.
Дальномерный способ определения координаты ЛА
Способы определения местоположения ЛА.
Дальномерный способ определения координаты ЛА
Способы определения местоположения ЛА.
Угломерный способ определения координаты ЛА
Способы определения местоположения ЛА.
Угломерный способ определения координаты ЛА
Способы определения местоположения ЛА.
Разностно-дальномерный способ определения координаты ЛА
Способы определения местоположения ЛА.
Разностно-дальномерный способ определения координаты ЛА
Способы определения местоположения ЛА.
Угломерно-дальномерный способ определения координаты ЛА
Способы определения местоположения ЛА.
Угломерно-дальномерный способ определения координаты ЛА
Способы определения местоположения ЛА.
Все эти виды определения МП ЛА способом
Способы определения местоположения ЛА.
Все эти виды определения МП ЛА способом
Способы определения местоположения ЛА.
Счислением пути называется способ определения координат МП
Способы определения местоположения ЛА.
Счислением пути называется способ определения координат МП
Классификация радионавигационных устройств и систем.
Основными классификационными признаками РНС являются:
1) назначение –
Классификация радионавигационных устройств и систем.
Основными классификационными признаками РНС являются:
1) назначение –
Классификация радионавигационных устройств и систем.
РНС можно подразделять по некоторым другим признакам:
Классификация радионавигационных устройств и систем.
РНС можно подразделять по некоторым другим признакам:
Классификация радионавигационных устройств и систем.
Классификация радионавигационных устройств по навигационному параметру
Классификация радионавигационных устройств и систем.
Классификация радионавигационных устройств по навигационному параметру
Классификация радионавигационных устройств и систем.
Классификация радионавигационных устройств по типу радиотехнических измерений
Классификация радионавигационных устройств и систем.
Классификация радионавигационных устройств по типу радиотехнических измерений
Классификация радионавигационных устройств и систем.
Основная цель создания КСН состоит в достижении
Классификация радионавигационных устройств и систем.
Основная цель создания КСН состоит в достижении
Принцип привода ЛА на аэродром с использованием радионавигационных устройств.
Принцип работы радиокомпаса
Принцип привода ЛА на аэродром с использованием радионавигационных устройств.
Принцип работы радиокомпаса
Принцип привода ЛА на аэродром с использованием радионавигационных устройств.
Если радиоволна распространяется
Принцип привода ЛА на аэродром с использованием радионавигационных устройств.
Если радиоволна распространяется
Принцип привода ЛА на аэродром с использованием радионавигационных устройств.
Максимальная по амплитуде
Принцип привода ЛА на аэродром с использованием радионавигационных устройств.
Максимальная по амплитуде

Принцип привода ЛА на аэродром с использованием радионавигационных устройств.
Упрощенная схема АРК
С
Принцип привода ЛА на аэродром с использованием радионавигационных устройств.
Упрощенная схема АРК
С
Принцип привода ЛА на аэродром с использованием радионавигационных устройств.
КУР отсчитывается не
Принцип привода ЛА на аэродром с использованием радионавигационных устройств.
КУР отсчитывается не
Принцип привода ЛА на аэродром с использованием радионавигационных устройств.
Во внеаэродромном воздушном
Принцип привода ЛА на аэродром с использованием радионавигационных устройств.
Во внеаэродромном воздушном
Принцип привода ЛА на аэродром с использованием радионавигационных устройств.
Пусть ветер дует
Принцип привода ЛА на аэродром с использованием радионавигационных устройств.
Пусть ветер дует
Принцип привода ЛА на аэродром с использованием радионавигационных устройств.
Курсовой способ является
Принцип привода ЛА на аэродром с использованием радионавигационных устройств.
Курсовой способ является
Принцип привода ЛА на аэродром с использованием радионавигационных устройств.
Активный полет на
Принцип привода ЛА на аэродром с использованием радионавигационных устройств.
Активный полет на
 Звуки и буквы. Звуко-буквенные домики
Звуки и буквы. Звуко-буквенные домики Защитные покрытия СД
Защитные покрытия СД Реинкарнация души
Реинкарнация души Початок роботи з Arduino
Початок роботи з Arduino 中联重科ZD320推土机保养-张兴
中联重科ZD320推土机保养-张兴 Авиавояж
Авиавояж 20141001_bezudarnye_glasnye_v_korne_slova_urok
20141001_bezudarnye_glasnye_v_korne_slova_urok Клиническая медицина Европы нового времени( XVIII -XIX вв.)
Клиническая медицина Европы нового времени( XVIII -XIX вв.) Сказки народов мира
Сказки народов мира Наземно-скважинная электроразведка (НСЭ)
Наземно-скважинная электроразведка (НСЭ) Проектирование операций технологического процесса
Проектирование операций технологического процесса С 8 марта, мамочка
С 8 марта, мамочка ы
ы project
project Saint Denis Basilica
Saint Denis Basilica 20121119_vulkany_5_klass
20121119_vulkany_5_klass Расчет колонн. Железобетонная квадратная колонна
Расчет колонн. Железобетонная квадратная колонна 20160329_master-klass_rol_vosklitsatelnyh_predlozheniy
20160329_master-klass_rol_vosklitsatelnyh_predlozheniy Сокровища сердца
Сокровища сердца Машинное охлаждение
Машинное охлаждение Страстная седмица. Первый день
Страстная седмица. Первый день Схема заработка
Схема заработка Управление транспортерами в Logo! Soft Comfort и ONI PLR Studio
Управление транспортерами в Logo! Soft Comfort и ONI PLR Studio Папы разные нужны, папы разные важны
Папы разные нужны, папы разные важны Природа России
Природа России 20141001_granatovyy_braslet
20141001_granatovyy_braslet Адаптация математической модели последовательного каскада
Адаптация математической модели последовательного каскада Викторина Что мы знаем о хлебе?
Викторина Что мы знаем о хлебе?