- Переходные процессы в электроприводах

Содержание
- 2. Электропривод Общие положения. Переходные процессы имеют место при пуске, торможении, реверсировании электропривода (ЭП), при изменении нагрузки
- 3. Электропривод. Общие положения. Режим перехода ЭП из одного установившегося состояния в другое, в процессе которого происходит
- 4. Электропривод. Общие положения. Состояние электропривода в любой момент времени определяется текущими значениями переменных и внешними воздействиями.
- 5. Электропривод. Общие положения. Из-за инерционности системы ЭП любой переходный процесс происходит в течение определенного интервала времени.
- 6. Электропривод. Общие положения. В установившемся режиме момент двигателя развиваемый на валу, уравновешен статическим моментом, действующим на
- 7. Электропривод. Общие положения. Таким образом, момент электродвигателя М всегда уравновешен суммой статического Мс, и динамического Мдин
- 8. Электропривод. Дифференциальное уравнение движения электропривода. Кинетическую энергию Ак, Дж, движущихся в системе электропривода масс можно записать
- 9. Электропривод. Ч.1 Дифференциальное уравнение движения электропривода. С изменением скорости изменяется во времени и кинетическая энергия системы
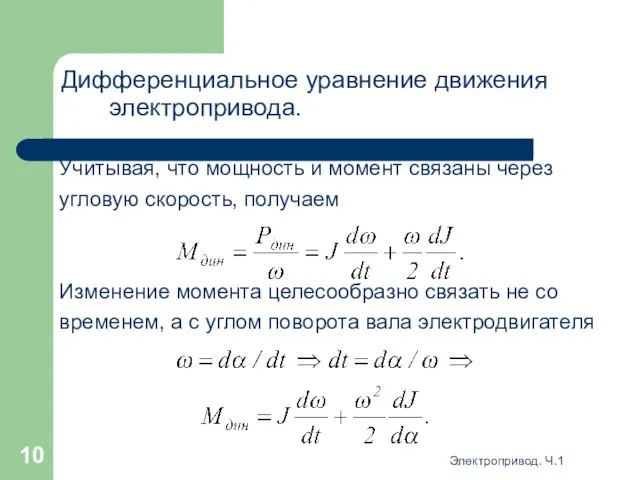
- 10. Электропривод. Ч.1 Дифференциальное уравнение движения электропривода. Учитывая, что мощность и момент связаны через угловую скорость, получаем
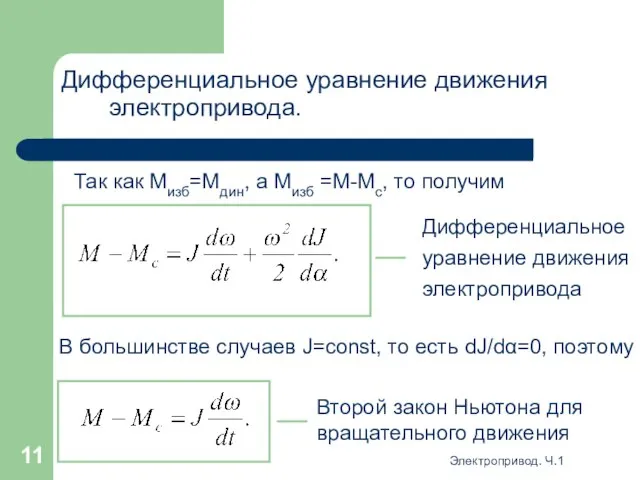
- 11. Электропривод. Ч.1 Дифференциальное уравнение движения электропривода. Так как Мизб=Мдин, а Мизб =М-Мс, то получим В большинстве
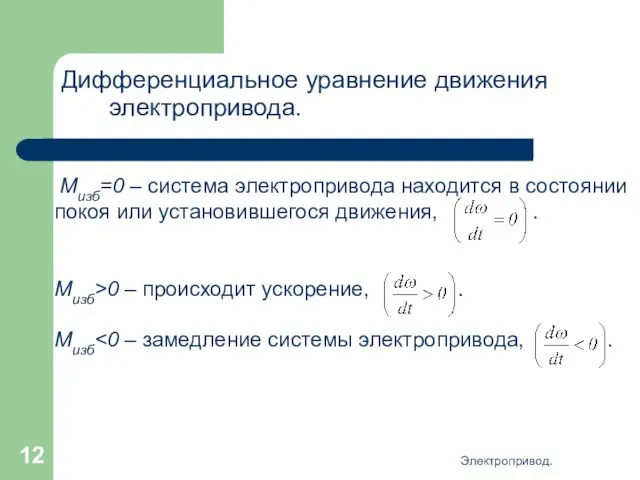
- 12. Электропривод. Дифференциальное уравнение движения электропривода.
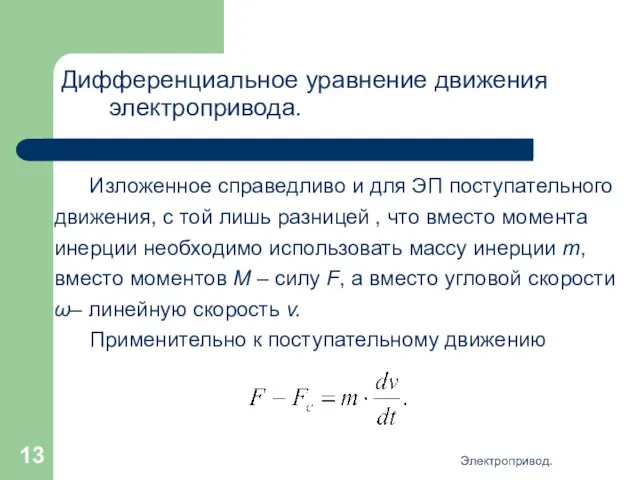
- 13. Электропривод. Дифференциальное уравнение движения электропривода. Изложенное справедливо и для ЭП поступательного движения, с той лишь разницей
- 14. Электропривод. Приведение моментов (сил) статического сопротивления и моментов (масс) инерции к валу электродвигателя. Для того, чтобы
- 15. Электропривод Приведение моментов (сил) статического сопротивления и моментов (масс) инерции к валу электродвигателя. При этом производится
- 16. Электропривод. Приведение моментов (сил) статического сопротивления и моментов (масс) инерции к валу электродвигателя.
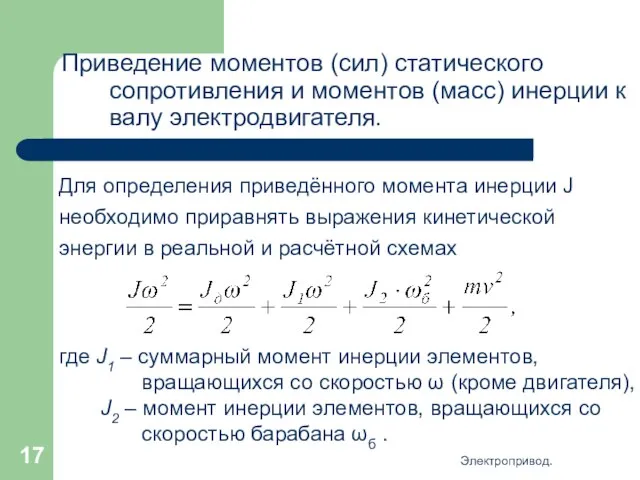
- 17. Электропривод. Приведение моментов (сил) статического сопротивления и моментов (масс) инерции к валу электродвигателя. Для определения приведённого
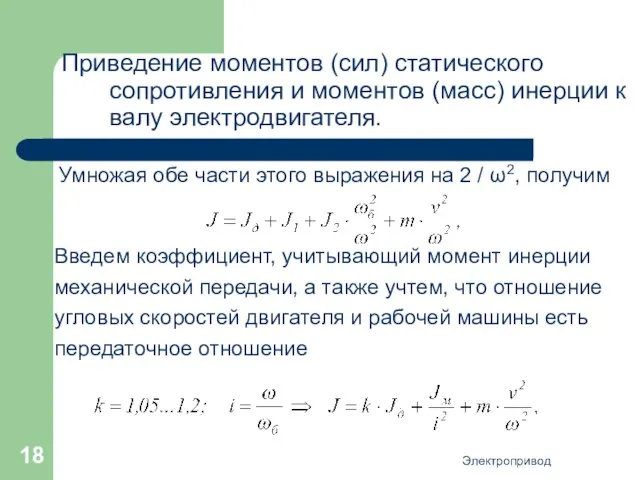
- 18. Электропривод Приведение моментов (сил) статического сопротивления и моментов (масс) инерции к валу электродвигателя. Умножая обе части
- 19. Электропривод Приведение моментов (сил) статического сопротивления и моментов (масс) инерции к валу электродвигателя. Момент инерции простых
- 20. Электропривод. Приведение моментов (сил) статического сопротивления и моментов (масс) инерции к валу электродвигателя. Приведение моментов и
- 22. Скачать презентацию
Электропривод
Общие положения.
Переходные процессы имеют место при пуске, торможении, реверсировании электропривода (ЭП),
Электропривод
Общие положения.
Переходные процессы имеют место при пуске, торможении, реверсировании электропривода (ЭП),
Электропривод.
Общие положения.
Режим перехода ЭП из одного установившегося состояния в другое,
Электропривод.
Общие положения.
Режим перехода ЭП из одного установившегося состояния в другое,
Электропривод.
Общие положения.
Состояние электропривода в любой момент времени определяется текущими значениями
Электропривод.
Общие положения.
Состояние электропривода в любой момент времени определяется текущими значениями
Электропривод.
Общие положения.
Из-за инерционности системы ЭП любой переходный процесс происходит в
Электропривод.
Общие положения.
Из-за инерционности системы ЭП любой переходный процесс происходит в
Электропривод.
Общие положения.
В установившемся режиме момент двигателя развиваемый на валу, уравновешен
Электропривод.
Общие положения.
В установившемся режиме момент двигателя развиваемый на валу, уравновешен
Электропривод.
Общие положения.
Таким образом, момент электродвигателя М всегда уравновешен суммой статического
Электропривод.
Общие положения.
Таким образом, момент электродвигателя М всегда уравновешен суммой статического
Электропривод.
Дифференциальное уравнение движения электропривода.
Кинетическую энергию Ак, Дж, движущихся в системе
Электропривод.
Дифференциальное уравнение движения электропривода.
Кинетическую энергию Ак, Дж, движущихся в системе
Электропривод. Ч.1
Дифференциальное уравнение движения электропривода.
С изменением скорости изменяется во времени и
Электропривод. Ч.1
Дифференциальное уравнение движения электропривода.
С изменением скорости изменяется во времени и
Электропривод. Ч.1
Дифференциальное уравнение движения электропривода.
Учитывая, что мощность и момент связаны через
Электропривод. Ч.1
Дифференциальное уравнение движения электропривода.
Учитывая, что мощность и момент связаны через
Электропривод. Ч.1
Дифференциальное уравнение движения электропривода.
Так как Мизб=Мдин, а Мизб
Электропривод. Ч.1
Дифференциальное уравнение движения электропривода.
Так как Мизб=Мдин, а Мизб
Электропривод.
Дифференциальное уравнение движения электропривода.
Электропривод.
Дифференциальное уравнение движения электропривода.
Электропривод.
Дифференциальное уравнение движения электропривода.
Изложенное справедливо и для ЭП поступательного
Электропривод.
Дифференциальное уравнение движения электропривода.
Изложенное справедливо и для ЭП поступательного
Электропривод.
Приведение моментов (сил) статического сопротивления и моментов (масс) инерции к
Электропривод.
Приведение моментов (сил) статического сопротивления и моментов (масс) инерции к
Электропривод
Приведение моментов (сил) статического сопротивления и моментов (масс) инерции к валу
Электропривод
Приведение моментов (сил) статического сопротивления и моментов (масс) инерции к валу

Электропривод.
Приведение моментов (сил) статического сопротивления и моментов (масс) инерции к
Электропривод.
Приведение моментов (сил) статического сопротивления и моментов (масс) инерции к
Электропривод.
Приведение моментов (сил) статического сопротивления и моментов (масс) инерции к
Электропривод.
Приведение моментов (сил) статического сопротивления и моментов (масс) инерции к
Электропривод
Приведение моментов (сил) статического сопротивления и моментов (масс) инерции к валу
Электропривод
Приведение моментов (сил) статического сопротивления и моментов (масс) инерции к валу
Электропривод
Приведение моментов (сил) статического сопротивления и моментов (масс) инерции к валу
Электропривод
Приведение моментов (сил) статического сопротивления и моментов (масс) инерции к валу
Электропривод.
Приведение моментов (сил) статического сопротивления и моментов (масс) инерции к валу
Электропривод.
Приведение моментов (сил) статического сопротивления и моментов (масс) инерции к валу
 Обман для глаз
Обман для глаз Очаровательные коты
Очаровательные коты Христианская церковь в раннее Средневековья
Христианская церковь в раннее Средневековья Миопия и гаджеты
Миопия и гаджеты О компании BP Services - геофизические услуги
О компании BP Services - геофизические услуги Стан розвитку паливно-енергетичного комплексу України за серпень та 8 місяців 2019 року
Стан розвитку паливно-енергетичного комплексу України за серпень та 8 місяців 2019 року !!ADC_DAC_(SAR)
!!ADC_DAC_(SAR) Презентация без названия (1)
Презентация без названия (1) Технологические процессы технического обслуживания и ремонта ТиТТМО
Технологические процессы технического обслуживания и ремонта ТиТТМО Go Green
Go Green Історія розвитку вивчення клітини
Історія розвитку вивчення клітини test
test Предварительное напряжение арматуры
Предварительное напряжение арматуры Ангелы в белых халатах. Теребаевская участковая больница
Ангелы в белых халатах. Теребаевская участковая больница Mon parc
Mon parc Fatigue crack growth in composite constructions
Fatigue crack growth in composite constructions Программа (концепция) развития муниципального образования Город Ижевск
Программа (концепция) развития муниципального образования Город Ижевск Космический мониторинг и геоинформационные системы в нефтегазовой отрасли
Космический мониторинг и геоинформационные системы в нефтегазовой отрасли Религия
Религия Наборы в пробирках. Эко подарки
Наборы в пробирках. Эко подарки Цигайская порода овец
Цигайская порода овец Церковь Воскресения Христова города Устюжны
Церковь Воскресения Христова города Устюжны Сервисный тренинг EXD06 Continental Teves MK25E1 Touareg 2007
Сервисный тренинг EXD06 Continental Teves MK25E1 Touareg 2007 02 Презентация брифинг 150922_5
02 Презентация брифинг 150922_5 Отдых на природе в России
Отдых на природе в России Природа в Забайкалье словно сказка
Природа в Забайкалье словно сказка Transport. Бүгінгі сабақта біз
Transport. Бүгінгі сабақта біз Алма Мүтәліпқызы Қыраубаева
Алма Мүтәліпқызы Қыраубаева