- Процессор. Характеристики, области применения

Содержание
- 2. Содержание: Лекция 1. МП-системы, основные понятия. Процессор: характеристики, области применения. Лекция 2. Микроконтроллеры, назначение, структура Лекция
- 3. Лекция 9. Интерфейс SPI Лекция 10. Интерфейс I2C Лекция 11. CAN-шина и протокол (Control Area Network)
- 4. МП-системы, основные понятия. Процессор: характеристики, области применения. Лекция 1. 3
- 6. Типичная структура МП-системы с общей шиной
- 7. Основные типы МП-систем следующие ( от более простых к более сложным): микроконтроллеры — наиболее простой тип
- 8. Процессор – это цифровое устройство, осуществляющее обработку информации и программное управление этим процессом. Процессор является основным
- 9. Основные характеристики процессора 1. Тактовая частота Все процессоры являются синхронными устройствами, т.е. любые операции, выполняемые ими,
- 10. 3. Адресное пространство Это совокупность ячеек оперативной и постоянной памяти и адресов устройств ввода-вывода, к которым
- 11. Микропроцессор – это процессор, реализованный в виде одной микросхемы или комплекта из нескольких специализированных микросхем Классификация
- 12. 2. По областям применения: а) Универсальные процессоры Предназначены для решения широкого круга задач. Применяются в ПК,
- 13. Микроконтроллеры, назначение, структура Лекция 2 3
- 14. Система управления на базе микропроцессора
- 15. Обобщенная структурная схема микроконтроллера
- 16. Гарвардская (а) и принстонская (б) архитектуры микроконтроллеров а) б)
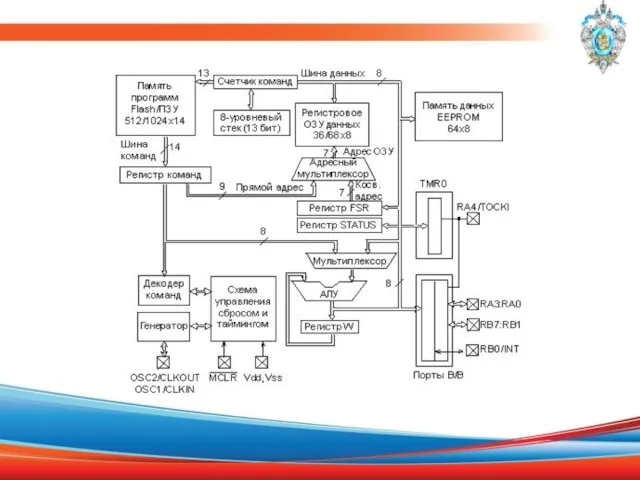
- 17. Структурная схема микроконтроллера
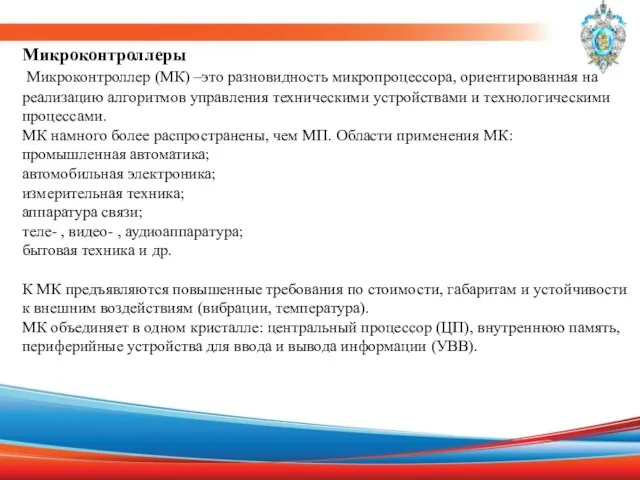
- 18. Микроконтроллеры Микроконтроллер (МК) –это разновидность микропроцессора, ориентированная на реализацию алгоритмов управления техническими устройствами и технологическими процессами.
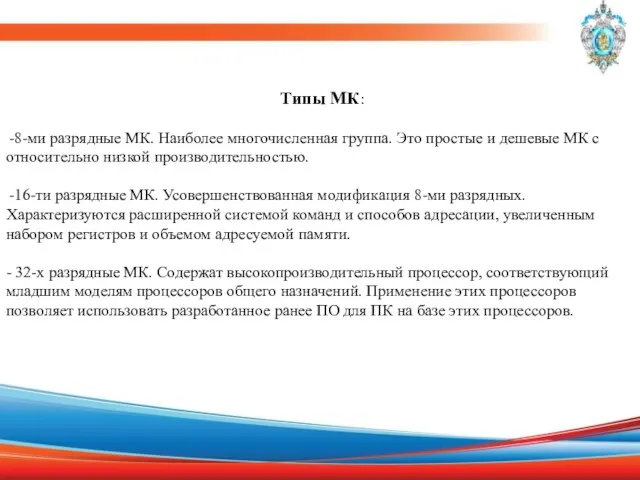
- 19. Типы МК: 8-ми разрядные МК. Наиболее многочисленная группа. Это простые и дешевые МК с относительно низкой
- 20. Фон Неймановская (Принстонская) архитектура Гарвардская архитектура
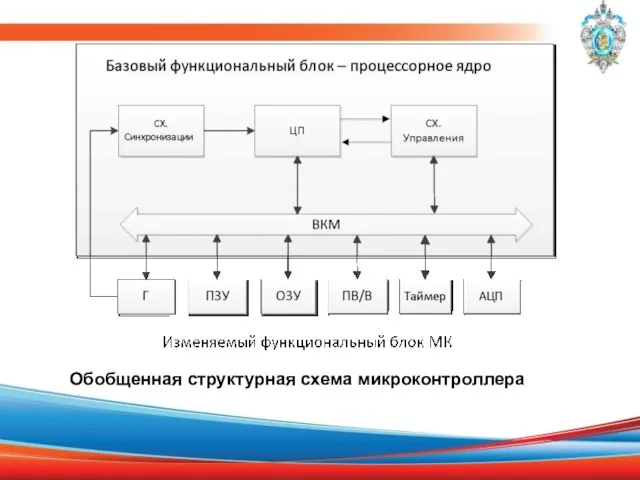
- 21. Обобщенная структурная схема микроконтроллера
- 22. Отличительные признаки микроконтроллеров: Модульный способ организации. На основе одного ядра проектируется целое семейство микроконтроллеров и отличается
- 23. Процессорное ядро микроконтроллера включает: ЦП Внутренние магистрали адреса, данных и управления (внутриконтроллерные магистрали, ВКМ) Схему формирования
- 24. Память МК В МК используется три основных вида памяти. 1.память программ – ПЗУ, предназначена для хранения
- 26. Память данных Как правило, выполняется на основе статического ОЗУ. Содержимое ячеек ОЗУ сохраняется при снижении тактовой
- 27. Таймеры-счетчики микроконтроллеров Лекция 3. 3
- 28. Для эффективного управления в режиме реального времени МК должен решать следующие задачи: - отсчет равных интервалов
- 29. Режимы работы счетчика 1.Режим таймера – отсчет времени через подсчет внутренних импульсов синхронизации с выхода управляемого
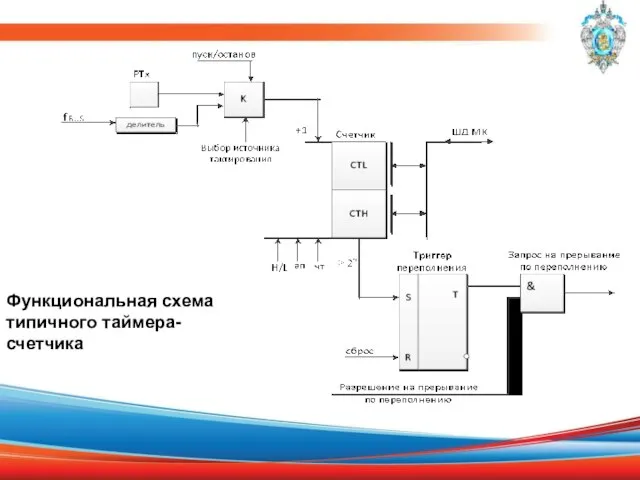
- 30. Функциональная схема типичного таймера-счетчика
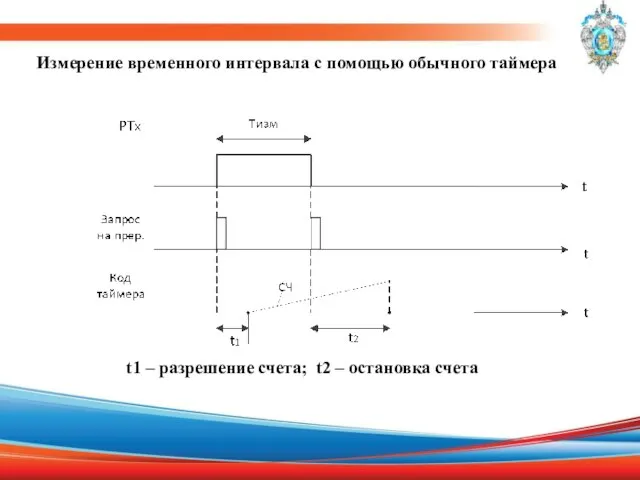
- 31. Измерение временного интервала с помощью обычного таймера t1 – разрешение счета; t2 – остановка счета
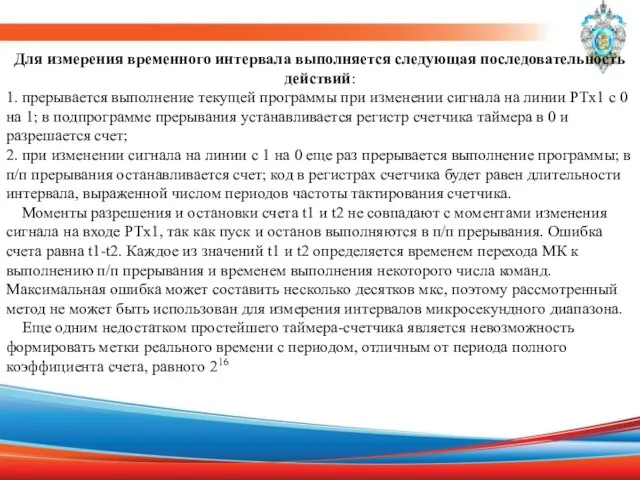
- 32. Для измерения временного интервала выполняется следующая последовательность действий: 1. прерывается выполнение текущей программы при изменении сигнала
- 33. Усовершенствование таймеров-счетчиков Лекция 4. 3
- 34. Усовершенствование модуля таймера-счетчика Осуществляется путем введения в структуру таймера-счетчика дополнительных аппаратных средств: канала входного захвата (Input
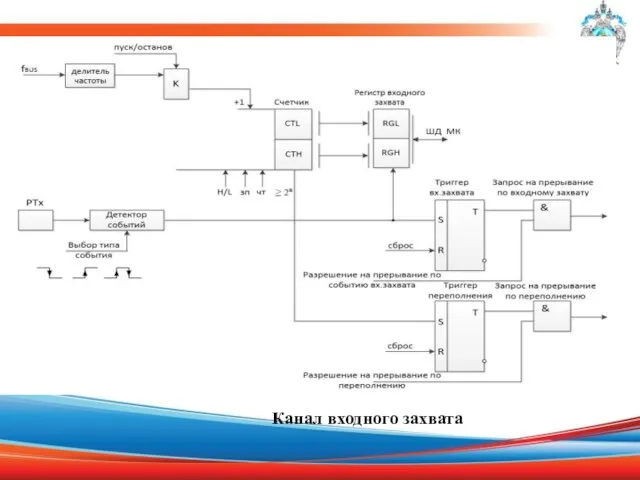
- 35. Канал входного захвата
- 36. Детектор событий следит за уровнем напряжения на одном из входов МК. Обычно это одна из линий
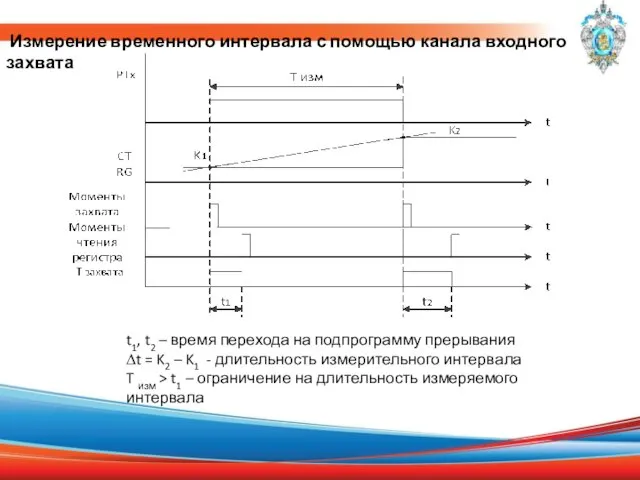
- 37. Измерение временного интервала с помощью канала входного захвата t1, t2 – время перехода на подпрограмму прерывания
- 38. При изменении уровня входного сигнала с 0 на 1 код счетчика К1 копируется в регистр захвата.
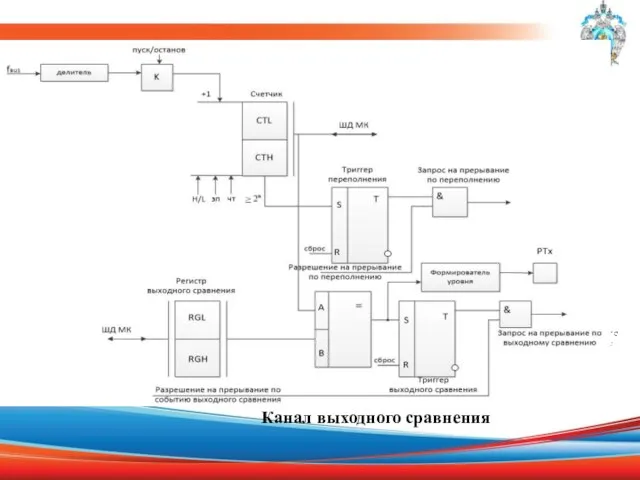
- 39. Канал выходного сравнения
- 40. Канал выходного сравнения Компаратор сравнивает текущий код счетчика таймера с кодом, который записан в 16-разрядном регистре
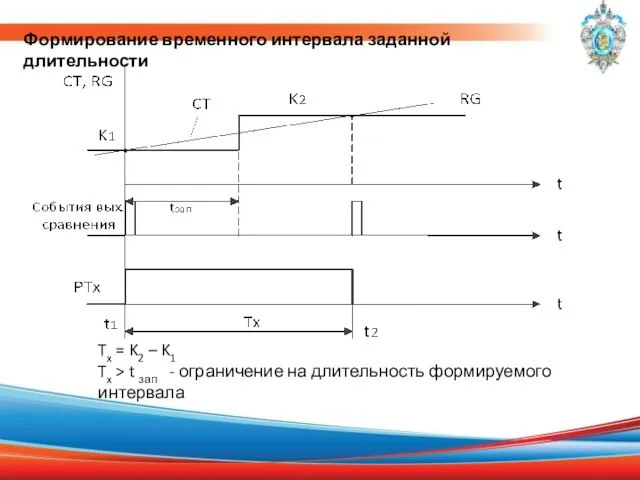
- 41. Формирование временного интервала заданной длительности Tx = K2 – K1 Tx > t зап - ограничение
- 42. Первое событие сравнения в момент t1 формирует нарастающий фронт сигнала PTx2. Одновременно генерируется запрос на прерывание.
- 43. Процессор событий, WDT, АЦП Лекция 5. 3
- 44. Процессоры событий -программируемый счетный массив (Programmable Counter Array, PCA). Усовершенствованный таймер позволяет решить многие задачи управления
- 45. Процессор событий
- 46. . Режим ШИМ В режиме ШИМ на соответствующем выводе МК формируется последовательность импульсов с периодом, равным
- 47. Временная диаграмма функционирования канала в режиме ШИМ ; r1= t1/T r2= t2/T
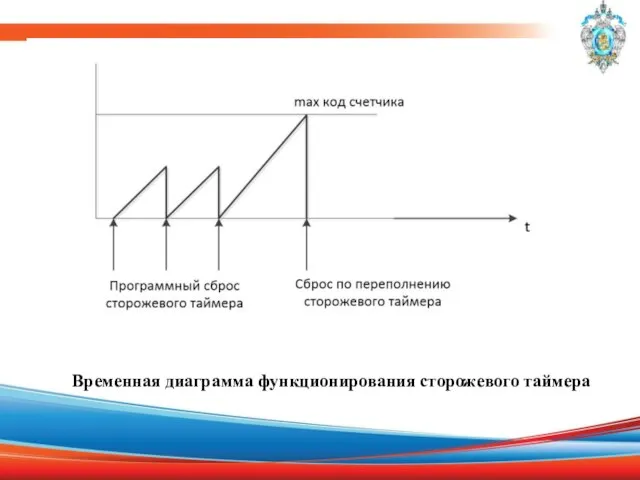
- 48. Сторожевой таймер (WDT – Watchdog Timer) Обеспечивает перезагрузку процессора при зависании Основа таймера – счетчик, который
- 49. Временная диаграмма функционирования сторожевого таймера
- 50. Структурная схема сторожевого таймера
- 51. Синхронизация МК, схема формирования сигнала сброса Лекция 7 . 3
- 52. Аппаратные средства обеспечения надежной работы МК Прикладная программа, записанная в память программ МК, должна обеспечивать его
- 53. Схема формирования сигнала сброса МК При включении напряжения питания МК должен начать выполнять записанную в памяти
- 54. Сразу после выхода из состояния сброса МК выполняет следующие действия: - запускает генератор синхронизации МК. Для
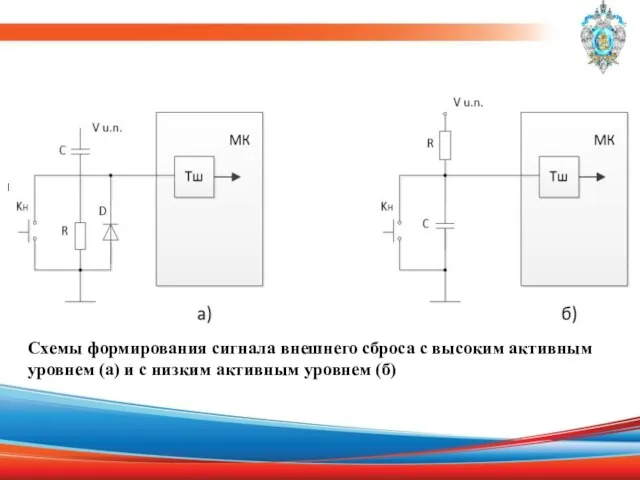
- 55. Схемы формирования сигнала внешнего сброса с высоким активным уровнем (а) и с низким активным уровнем (б)
- 56. Подсистема начального сброса современных микроконтроллеров Power-On — внутренний автоматический сброс, который активизируется сразу после подачи питания;
- 57. Модули аналогового ввода/вывода Необходимость приема и формирования аналоговых сигналов требует наличия в МК модулей аналогового ввода/вывода.
- 58. Встроенный аналоговый компаратор
- 59. Функциональная схема АЦП Uon = Vn – VL, Разрешающая способность АЦП равна Uоп/2n , где n
- 60. Минимизация энергопотребления, синхронизация Лекция 6. 3
- 61. Минимизация энергопотребления в системах на основе МК Малый уровень энергопотребления является зачастую определяющим фактором при выборе
- 62. Основные режимы работы микроконтроллеров -Активный режим (Run mode) — основной режим работы МК -Режим ожидания (Wait
- 63. Основные группы МК в зависимости от диапазона питающих напряжений МК с напряжением питания 5,0 В±10%. Эти
- 64. Тактирование с использованием кварцевого или керамического резонатора (а) и с использованием RC-цепи (б)
- 65. подсистема синхронизации На структурной схеме имеется несколько встроенных генераторных узлов. HF (High Frequency) — высокочастотный, LF
- 66. внутреннее устройство генератора инвертирующий усилитель A1; буферный логический формирователь на триггере Шмитта DD1. Если к выводам
- 67. В МК произошло функциональное разделение генератора синхронизации, который выделился в отдельный модуль, и схемы формирования последовательности
- 68. Режимы работы основного канала синхронизации • а) от высокочастотного кварцевого резонатора 1...33 МГц ; •б) от
- 69. Пример схемы синхронизации современных микроконтроллеров AVR Источники тактового сигнала для микроконтроллеров AVR 1)Настраиваемый внутренний RC-генератор 2)Внешний
- 70. Схема синхронизации микроконтроллеров AVR 4; 8 Мгц
- 71. 2-я схема синхронизации микроконтроллеров AVR
- 73. Тактирование с использованием внешнего синхрогенератора для n-МОП технологии (а) и для k-МОП технологии (б)
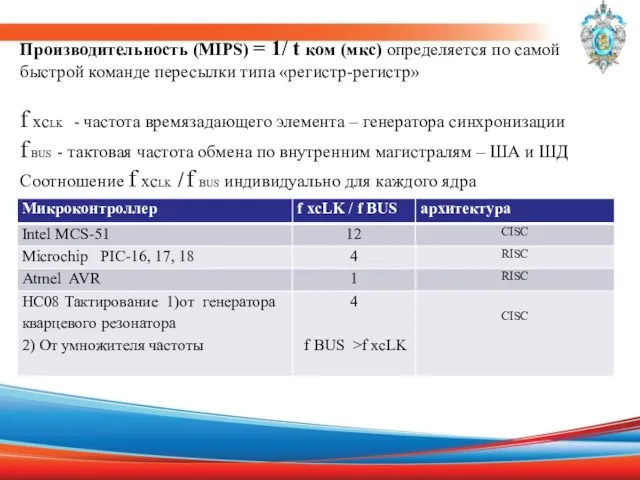
- 74. Производительность (MIPS) = 1/ t ком (мкс) определяется по самой быстрой команде пересылки типа «регистр-регистр» f
- 75. RISC МК имеют большую производительность по сравнению с CISC при одной и той же f BUS
- 76. Модуль прерываний МК Запросы прерывания могут поступать как от внешних источников, так и от источников, расположенных
- 77. Могут быть МК с одноуровневой системой приоритетов (все запросы равноценны), многоуровневой системой с фиксированными приоритетами и
- 78. Параллельный и последовательный ввод-вывод в МК Лекция 8 3
- 79. Порты параллельного ввода/вывода Различают следующие типы параллельных портов: - однонаправленные порты, предназначенные только для ввода или
- 80. Схема управления одним разрядом параллельного порта ввода вывода
- 81. Модули последовательного ввода/вывода Задачи, которые решаются средствами модуля контроллера последовательного ввода/вывода - связь встроенной микроконтроллерной системы
- 82. МОДУЛЬ UART . Среди различных типов встроенных контроллеров последовательного обмена, которые входят в состав тех или
- 83. Для асинхронного режима принят следующий ряд стандартных скоростей обмена: 50, 75, 110, 150, 300, 600, 1200,
- 84. Модуль UART (Universal Asynchronous Receiver-Transmitter)
- 85. Два кадра асинхронного обмена модуля UART
- 86. Микроконтроллерная система, использующая модуль UART
- 87. Организация синхронной передачи данных
- 88. Устройства, которые имеют на своём борту UART, по часовой стрелке: мышка, ридер-эмулятор SMART-карт, КПК Palm m105,
- 89. Интерфейс SPI Лекция 9. 3
- 90. SPI (. Serial Peripheral Interface, SPI bus — последовательный периферийный интерфейс, шина SPI) — последовательный синхронный
- 91. Микроконтроллерные системы, использующие модуль SPI (Serial Peripheral Interface) Кольцевая структура связи с несколькими ведомыми устройствами через
- 92. В SPI используются четыре цифровых сигнала: MOSI — выход ведущего, вход ведомого ( Master Out Slave
- 93. Типичная структура связей и линий интерфейса SPI
- 94. Обобщенная временная диаграмма обмена по интерфейсу SPI
- 95. Модуль SPI, схема функциональная 1.флаг ошибки приема 2.нарушение режима контроля 3.завершение приема байта данных 4. готовность
- 96. Режимы работы интерфейса SPI Возможны четыре комбинации фазы (CPHA) и полярности (CPOL) сигнала SCLK по отношению
- 97. CPHA=0 CPOL=0 Временная диаграмма работы модуля SPI для режима 00 и 10
- 98. CPHA=1 CPOL=0 Временная диаграмма работы модуля SPI для режима 01 и 11
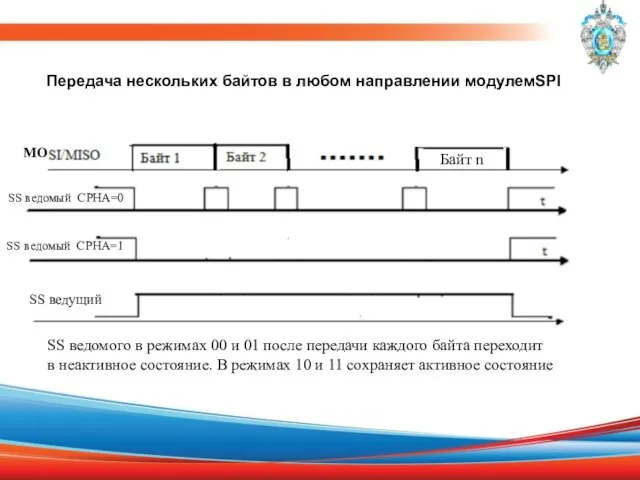
- 99. SS ведомый СРНА=0 SS ведомый СРНА=1 SS ведущий Байт n МО Передача нескольких байтов в любом
- 100. Интерфейс I2C Лекция 10. 3
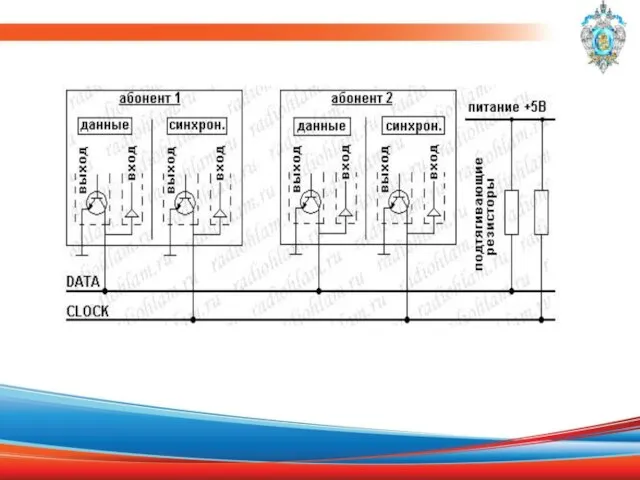
- 101. Последовательный протокол обмена данными IIC (также называемый I2C – Inter-Integrated Circuits, межмикросхемное соединение) использует для передачи
- 103. Состояние СТАРТ и СТОП. Передача данных Процесс обмена по шине от момента формирования состояния СТАРТ до
- 104. Начало передачи определяется Start последовательностью — провал SDA при высоком уровне SCL При передаче информации от
- 105. Логический уровень Первый пакет передается от ведущего к ведомому это физический адрес устройства и бит направления.
- 106. Чтение R=1
- 107. Обращение к микросхеме часов реального времени PCF8583 (запись)
- 108. Обращение к микросхеме часов реального времени PCF8583 (чтение)
- 109. Арбитраж между двумя ведущими Передатчик 1 проигрывает арбитраж - его линия данных не совпадает с SDA
- 110. Синхронизация во время арбитража 1. Состояние ожидания 2. Начало отсчета ВЫСОКОГО периода синхроимпульса Период LOW определяется
- 111. CAN-шина и протокол (Control Area Network) Лекция 11 3
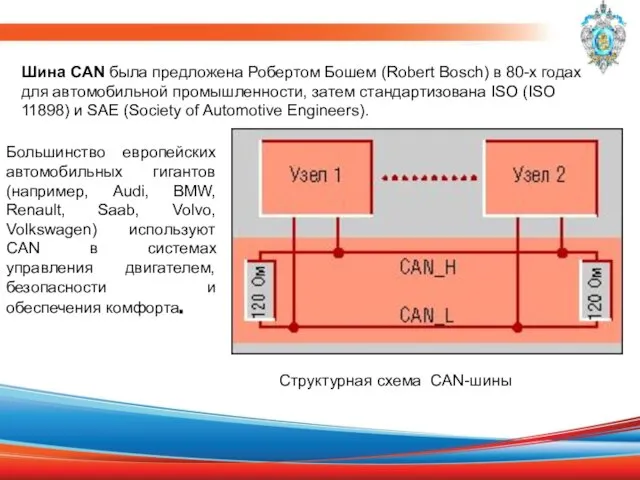
- 112. Шина CAN была предложена Робертом Бошем (Robert Bosch) в 80-х годах для автомобильной промышленности, затем стандартизована
- 113. Основные характеристики CAN сети 1) Среда передачи данных в CAN не определена это может быть витая
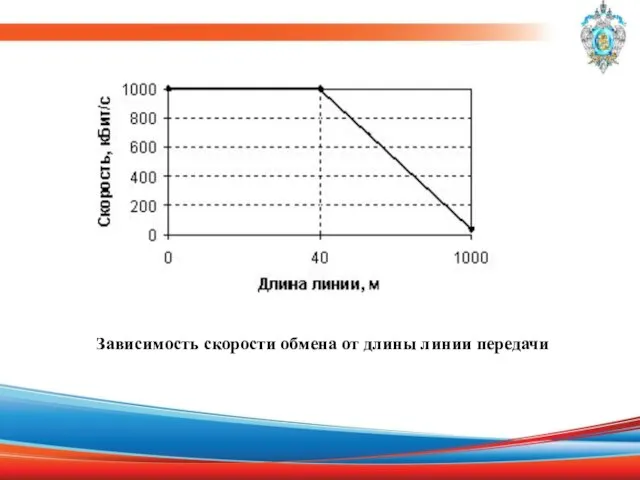
- 114. Зависимость скорости обмена от длины линии передачи
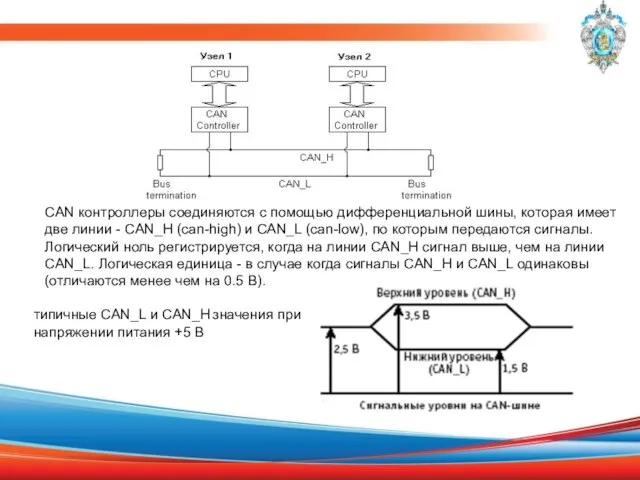
- 115. CAN контроллеры соединяются с помощью дифференциальной шины, которая имеет две линии - CAN_H (can-high) и CAN_L
- 116. Типы фреймов (сообщений) в CAN-протоколе фрейм данных (data frame) перемещает данные с передатчика на приемник (приемники);
- 117. Data frame стандарта CAN 2.0A Поле SOF (Start of Frame) находится в начале фрейма данных и
- 118. Управляющее поле (Control Field) содержит 6 битов, из которых 4 бита (DLC0-DLC4) составляют поле Data Length
- 119. Побитовый арбитраж на шине САN Поле арбитража CAN-кадра используется в CAN для разрешения коллизий доступа к
- 120. Разрядная ошибка Bit monitoring появляется, когда передатчик сравнивает уровень на шине с уровнем, который должен передаваться,
- 121. Механизм ограничения ошибок Каждый узел ведет два счетчика ошибок: Transmit Error Counter (счетчик ошибок передачи) и
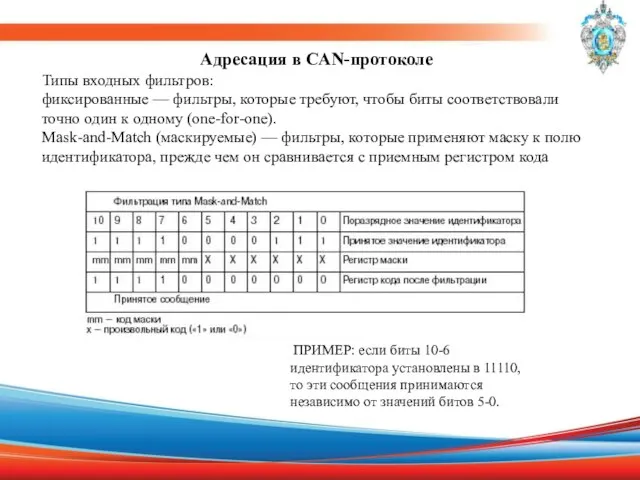
- 122. Адресация в CAN-протоколе Типы входных фильтров: фиксированные — фильтры, которые требуют, чтобы биты соответствовали точно один
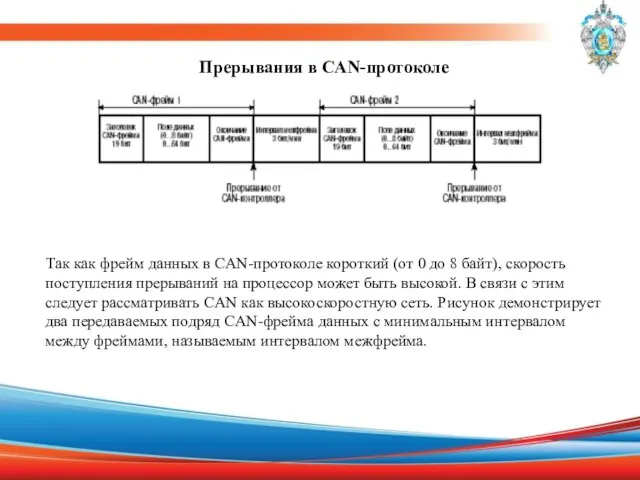
- 123. Прерывания в CAN-протоколе Так как фрейм данных в CAN-протоколе короткий (от 0 до 8 байт), скорость
- 124. Таблица показывает самый жесткий режим прерывания для случая, если CANприемник получает все фреймы во время текущей
- 125. Большинство микроконтроллеров нижнего уровня не может поддерживать такую высокую скорость обработки прерываний. Следовательно, нужно находить компромисс
- 126. Микросхемы, которые поддерживают CAN-протокол, выпускаются различными поставщиками, такими как Philips, Motorola, Siemens, National Instruments и Intel.
- 127. Применение в индустриальных приложениях В настоящее время СAN-протокол активно используется в индустриальных сетях. Известные фирмы Hoheywell
- 128. Микроконтроллеры семейств PIC (Peripheral Interface Controller) компании Microchip Лекция 12 3
- 129. Основных семейств 8-разрядных RISC-микроконтроллеров PIC12CXXX – семейство микроконтроллеров, выпускаемых в миниатюрном 8-выводном исполнении. Система команд как
- 130. PIC17CXXX – семейство высокопроизводительных микроконтроллеров с расширенной системой команд 16-разрядного формата (58 команд), с объемом памяти
- 131. Общие сведения о микроконтроллерах семейства PIC16CXXX Микроконтроллеры семейства PIC16CXXX, выполненные по технологии HCMOS представляют собой 8-разрядные
- 132. PIC-контроллеры имеют от 12 до 33 линий цифрового ввода-вывода, причем каждая из них может быть независимо
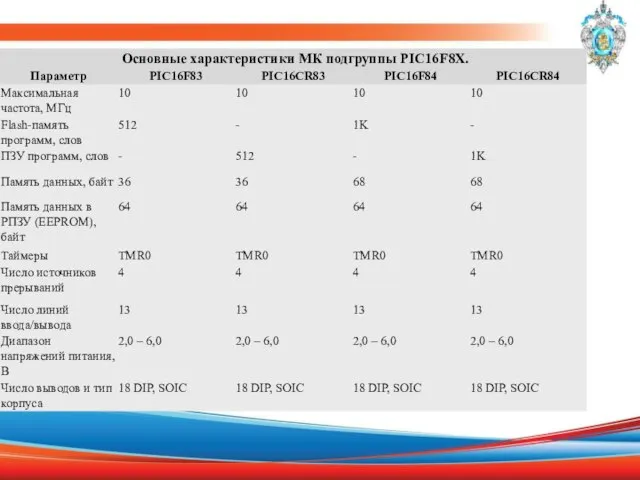
- 134. Характеристики микроконтроллеров подгруппы PIC16F8X используются только 35 простых команд; все команды выполняются за один цикл (400
- 135. четыре источника прерывания: внешний вход RB0/INT; переполнение таймера TMR0; изменение сигналов на линиях порта B; завершение
- 137. Микроконтроллеры семейств PIC (Peripheral Interface Controller) компании Microchip (продолжение) Лекция 13 3
- 138. Память программ и стека Вектор сброса находится по адресу 0000h, вектор прерывания – по адресу 0004h
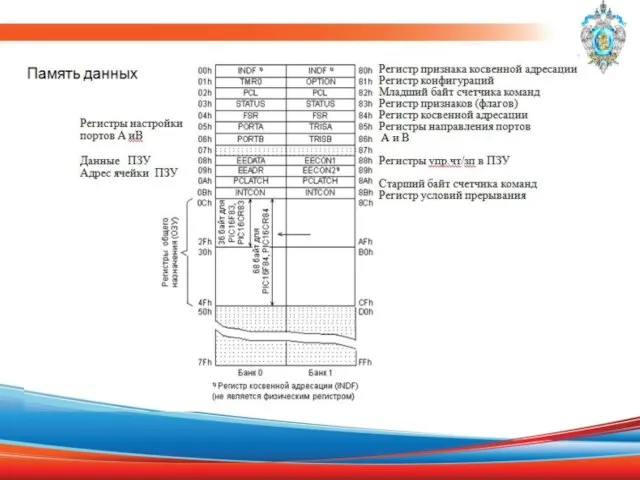
- 140. Бит 7: IRP: бит выбора страницы банка данных (используется при косвенной адресации) В рассматриваемой модели поддерживается
- 141. Бит 3: /PD: бит снижения потребляемой мощности 1 = после включения питания, а также командой CLRWDT
- 142. Бит 7: /RBPU: бит установки резисторов "pull-up" на выводах PORTB 0 = резисторы "pull-up" подключены 1
- 143. Бит 3: PSA: бит назначения пределителя 0 = предделитель подключен к TMR0 1 = предделитель подключен
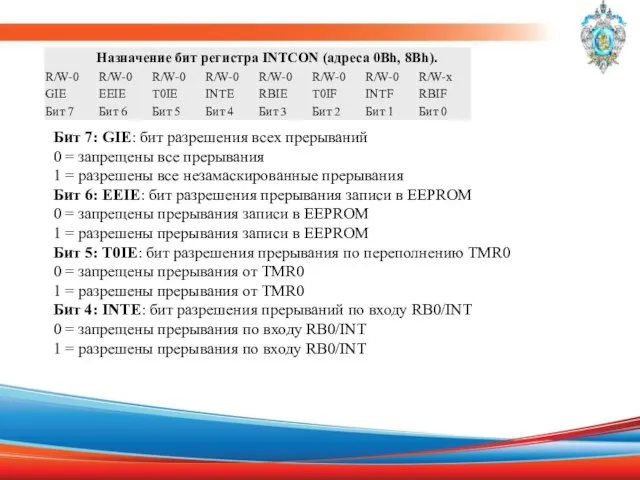
- 144. Бит 7: GIE: бит разрешения всех прерываний 0 = запрещены все прерывания 1 = разрешены все
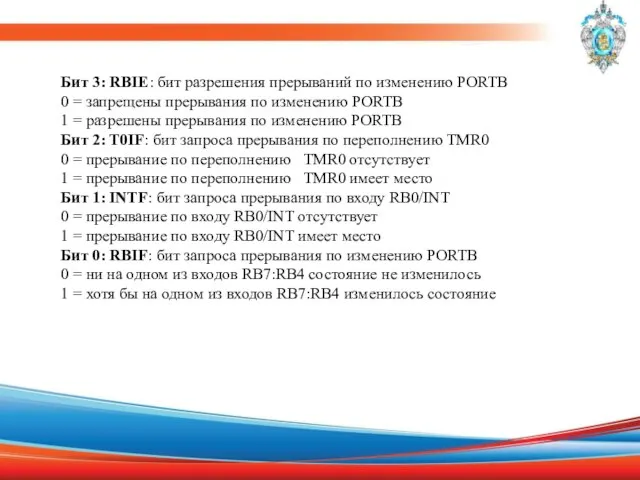
- 145. Бит 3: RBIE: бит разрешения прерываний по изменению PORTB 0 = запрещены прерывания по изменению PORTB
- 146. Микроконтроллеры семейств PIC (Peripheral Interface Controller) компании Microchip (продолжение) Лекция 14 3
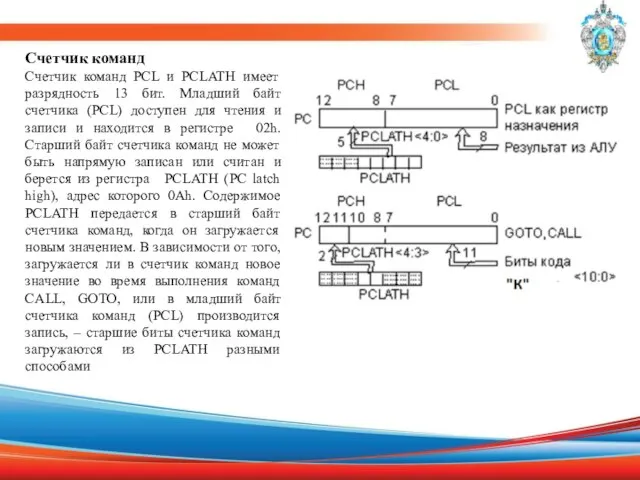
- 147. Счетчик команд Счетчик команд PCL и PCLATH имеет разрядность 13 бит. Младший байт счетчика (PCL) доступен
- 148. Методы адресации данных При прямой 9-битовой адресации младшие 7 бит берутся как прямой адрес из команды
- 149. Форматы команд Каждая команда МК подгруппы PIC16F8X представляет собой 14-битовое слово, разделенное на код операции (OPCODE),
- 150. Все команды микроконтроллеров PIC16CXXX однословные 14 - разрядные. 14 - разрядная шина доступа к памяти программ
- 151. Схема тактирования и выполнения команды. Входная тактовая частота, поступающая с вывода OSC1/CLKIN, делится внутри на четыре,
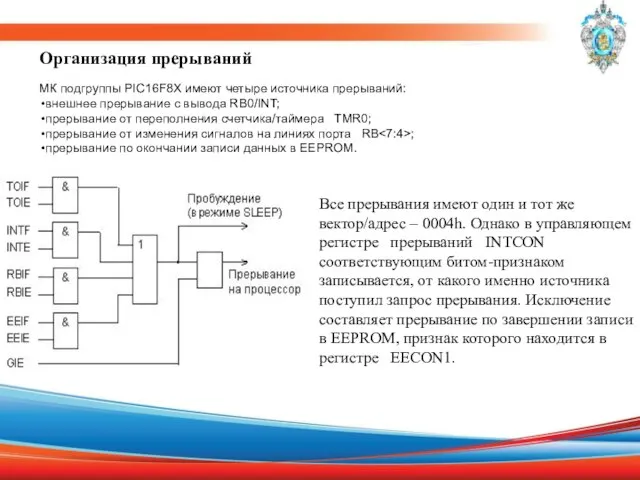
- 152. Организация прерываний МК подгруппы PIC16F8X имеют четыре источника прерываний: внешнее прерывание с вывода RB0/INT; прерывание от
- 153. Порядок действий при возникновении запросов на прерывания 1.Запрос прерывания фиксируется в регистре INTCON . 2.Заканчивается выполнение
- 154. Структура подпрограммы обработки прерывания Подпрограмма начинается с сохранения содержимого регистров W и STATUS в предварительно зарезервированных
- 155. EEPROM память данных доступна для записи/чтения в нормальном режиме работы микроконтроллера во всем диапазоне рабочего напряжения
- 156. EEPROM память данных позволяет выполнить чтение и запись байта. При записи байта происходит автоматическое стирание ячейки
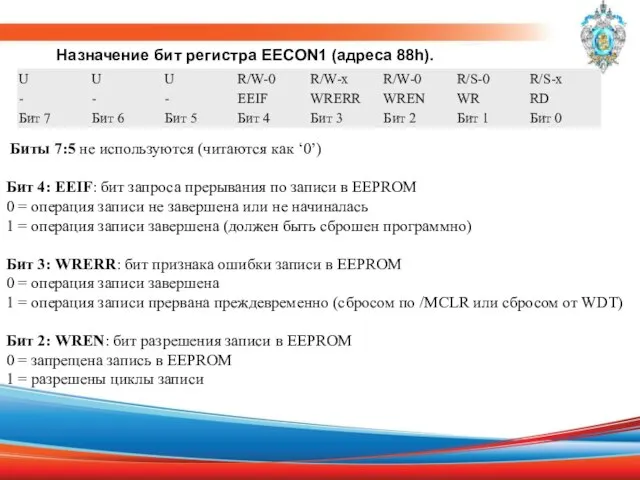
- 157. Назначение бит регистра EECON1 (адреса 88h). Биты 7:5 не используются (читаются как ‘0’) Бит 4: EEIF:
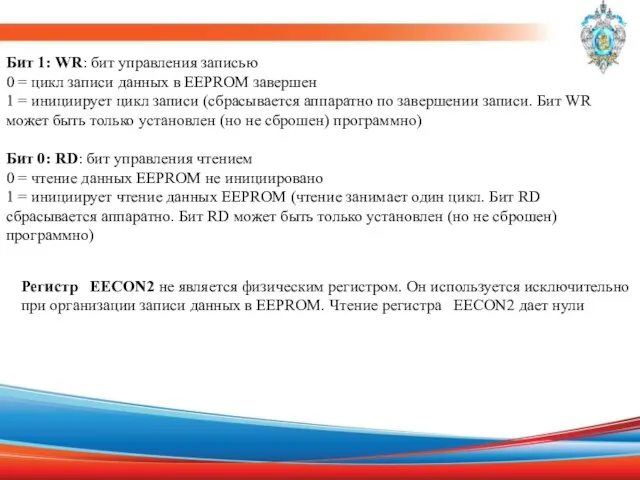
- 158. Бит 1: WR: бит управления записью 0 = цикл записи данных в EEPROM завершен 1 =
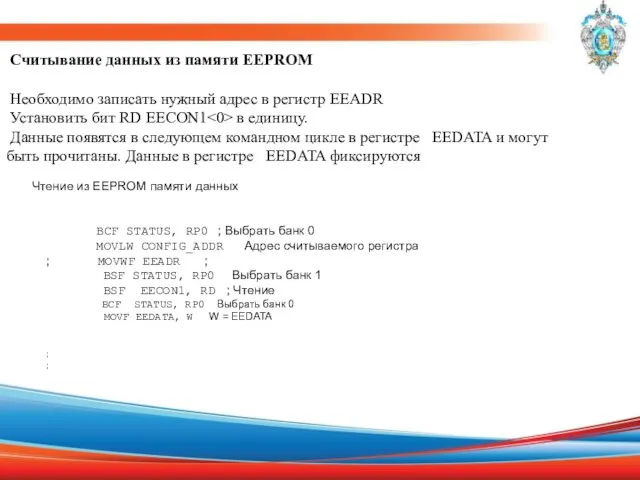
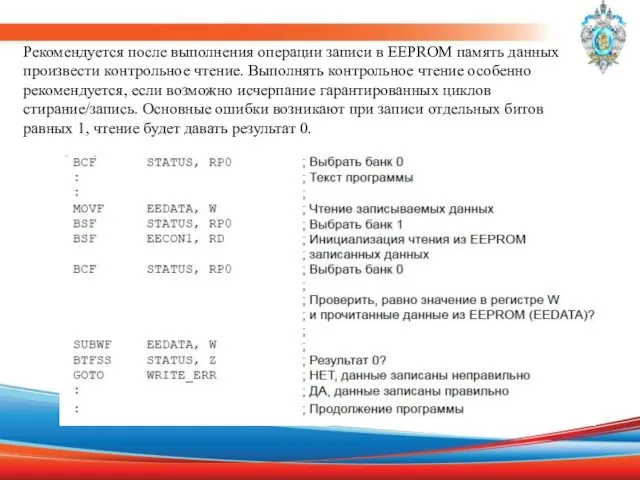
- 159. Считывание данных из памяти EEPROM Необходимо записать нужный адрес в регистр EEADR Установить бит RD EECON1
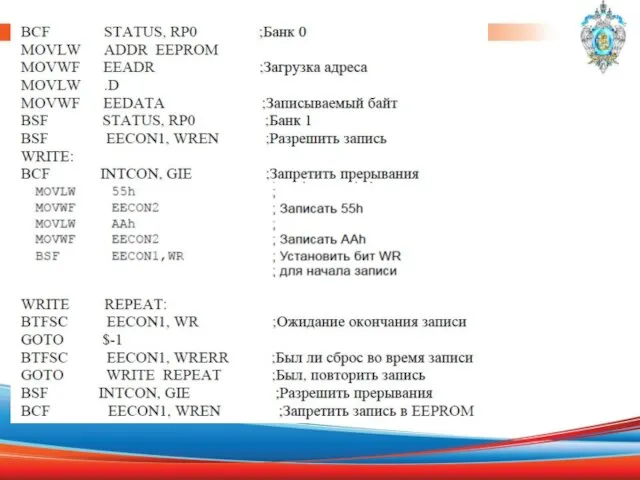
- 160. Записи в память EEPROM необходимо сначала записать адрес в EEADR-регистр и данные в EEDATA-регистр. Затем следует
- 162. Рекомендуется после выполнения операции записи в EEPROM память данных произвести контрольное чтение. Выполнять контрольное чтение особенно
- 163. Специальные функции В PIC16F8X реализованы следующие специальные функции: сброс; сторожевой таймер (WDT); режим пониженного энергопотребления (SLEEP);
- 164. Для реализации сброса по включению питания в МК подгруппы PIC16F8X предусмотрен встроенный детектор включения питания. Таймер
- 165. Микроконтроллеры подгруппы PIC16F8X имеют встроенный сторожевой таймер WDT. Для большей надежности он работает от собственного внутреннего
- 166. Команды "CLRWDT" и "SLEEP" обнуляют WDT и пределитель, если он подключен к WDT. Это запускает выдержку
- 167. Режим пониженного энергопотребления SLEEP предназначен для обеспечения очень малого тока потребления в ожидании (менее 1 мкА
- 168. Программный код, который записан в кристалл, может быть защищен от считывания при помощи установки бита защиты
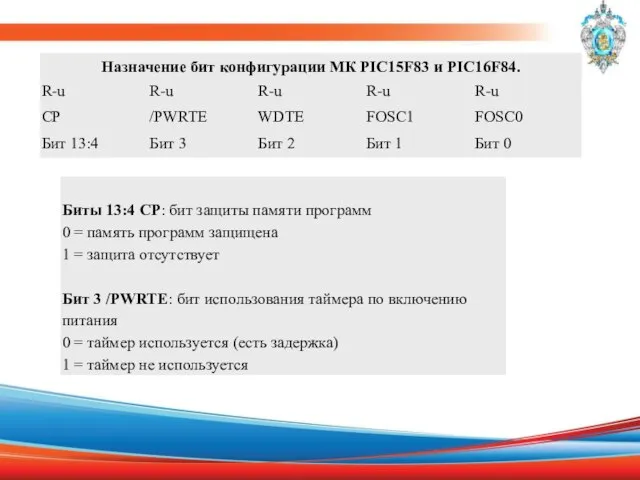
- 170. Для выбора различных режимов работы используются биты конфигурации которые хранятся в памяти программ по адресу 2007h
- 172. Четыре слова памяти, расположенные по адресам 2000h-2003h, предназначены для хранения идентификационного кода (ID) пользователя, контрольной суммы
- 173. 8-разрядные микроконтроллеры AVR фирмы Atmel. Лекция 15 3
- 174. В рамках единой базовой архитектуры микроконтроллеры AVR подразделяются на три семейства: • Classic AVR; • Mega
- 175. Для семейства "classic" - это модемы различных типов, современные зарядные устройства, изделия класса Smart Cards и
- 176. Микроконтроллер AVR содержит: быстрый RISC-процессор, два типа энергонезависимой памяти (Flash-память программ и память данных EEPROM), оперативную
- 177. В состав микроконтроллера входят: ■ генератор тактового сигнала (GCK); ■ процессор (CPU); ■ постоянное запоминающее устройство
- 178. Карта памяти микроконтроллера АТхS8515 Память данных
- 179. В состав процессора (CPU) входят: ■ счетчик команд (PC); ■ арифметико-логическое устройство (ALU); ■ блок регистров
- 180. Регистры общего назначения CPU микроконтроллеров AVR
- 181. Шесть регистров (с R26 по R31) регистрового файла, кроме обычной для прочих регистров функций, выполняют функцию
- 182. Конфигурация памяти Первые 96 адресов занимают регистровый файл и пространство памяти I/O, в следующих 4000 адресов
- 183. 8-разрядные микроконтроллеры AVR фирмы Atmel (продолжение) Лекция 16 3
- 184. Режимы адресации памяти программ и данных При обращении к Flash памяти программ и памяти данных (SRAM,
- 185. Непосредственная адресация данных 16-разрядный адрес данных содержится в 16 младших разрядах 32-разрядной команды. Rd/Rr определяют регистр
- 186. Непосредственная адресация, два регистра Rd и Rr Операнды содержатся в регистрах r (Rr) и d (Rd).
- 187. Косвенная адресация данных со смещением .Косвенная адресация данных со смещением Адрес операнда вычисляется суммированием содержимого регистра
- 188. Косвенная адресация данных с преддекрементом Перед выполнением операции регистр X, Y или Z декрементируется. Декрементированное содержимое
- 189. Адресация константы с использованием команд LPM и ELPM Непосредственная адресация памяти программ, команды JMP и CALL
- 190. Косвенная адресация памяти программ, команды IJMP и ICALL Выполнение программы продолжается с адреса, содержащегося в регистре
- 191. В состав микроконтроллера помимо процессорного ядра и блоков памяти входят периферийные устройства, обеспечивающие различные дополнительные функции.
- 192. С каждым портом связаны три регистра ввода-вывода: регистр DDRx направления передачи данных, регистр PORTx данных порта
- 193. Прерывания (INTERRUPTS) Все микроконтроллеры AVR имеют многоуровневую систему прерываний. Область векторов прерываний размещается в начале памяти
- 194. Таймеры/счетчики (TIMER/COUNTERS) Микроконтроллеры AVR имеют в своем составе от 1 до 4 таймеров/счетчиков с разрядностью 8
- 195. Аналоговый компаратор (AC) Сравнивает напряжения на двух выводах (пинах) микроконтроллера. Результатом сравнения будет логическое значение, которое
- 196. Тактовый генератор Тактовый генератор вырабатывает импульсы для синхронизации работы всех узлов микроконтроллера. Внутренний тактовый генератор AVR
- 197. Питание AVR функционируют при напряжениях питания от 1,8 до 6,0 Вольт. Ток потребления в активном режиме
- 198. Режим холостого хода (IDLE). Прекращает работу только процессор и фиксируется содержимое памяти данных, а внутренний генератор
- 199. Основные этапы разработки микропроцессорной системы на основе микроконтроллеров Лекция 17 3
- 200. МПС на основе МК используются чаще всего в качестве встроенных систем для решения задач управления некоторым
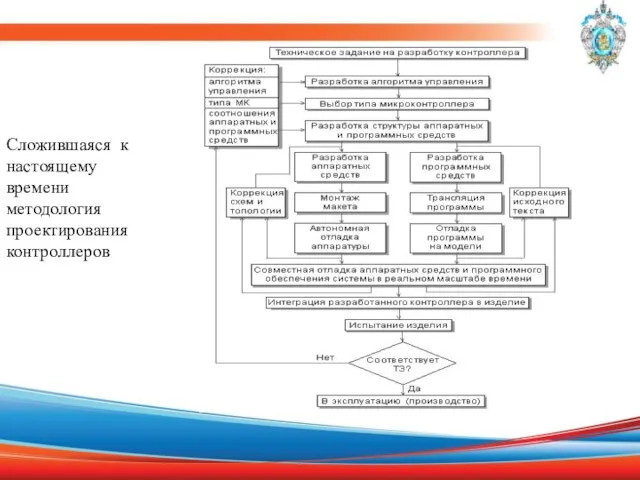
- 201. Сложившаяся к настоящему времени методология проектирования контроллеров
- 202. В техническом задании формулируются требования к контроллеру с точки зрения реализации определенной функции управления. Техническое задание
- 203. При выборе типа МК учитываются следующие основные характеристики: - разрядность; - быстродействие; - набор команд и
- 204. На этапе разработки структуры контроллера окончательно определяется состав имеющихся и подлежащих разработке аппаратных модулей, протоколы обмена
- 206. Скачать презентацию
Содержание:
Лекция 1. МП-системы, основные понятия. Процессор: характеристики, области применения.
Лекция 2. Микроконтроллеры,
Содержание:
Лекция 1. МП-системы, основные понятия. Процессор: характеристики, области применения.
Лекция 2. Микроконтроллеры,
Лекция 9. Интерфейс SPI
Лекция 10. Интерфейс I2C
Лекция 11. CAN-шина
Лекция 9. Интерфейс SPI
Лекция 10. Интерфейс I2C
Лекция 11. CAN-шина
МП-системы, основные понятия. Процессор: характеристики, области применения.
Лекция 1.
3
МП-системы, основные понятия. Процессор: характеристики, области применения.
Лекция 1.
3
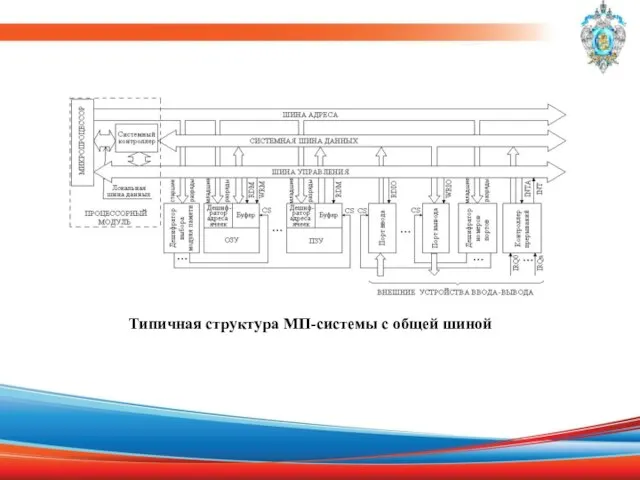
Типичная структура МП-системы с общей шиной
Типичная структура МП-системы с общей шиной
Основные типы МП-систем следующие ( от более простых к более сложным):
микроконтроллеры
Основные типы МП-систем следующие ( от более простых к более сложным):
микроконтроллеры
Процессор – это цифровое устройство, осуществляющее обработку информации и программное управление
Процессор – это цифровое устройство, осуществляющее обработку информации и программное управление
Основные характеристики процессора
1. Тактовая частота
Все процессоры являются синхронными устройствами, т.е.
Основные характеристики процессора
1. Тактовая частота
Все процессоры являются синхронными устройствами, т.е.
3. Адресное пространство
Это совокупность ячеек оперативной и постоянной памяти и адресов
3. Адресное пространство
Это совокупность ячеек оперативной и постоянной памяти и адресов
Микропроцессор – это процессор, реализованный в виде одной микросхемы или комплекта из нескольких
Микропроцессор – это процессор, реализованный в виде одной микросхемы или комплекта из нескольких
2. По областям применения:
а) Универсальные процессоры
Предназначены для решения широкого круга задач.
2. По областям применения:
а) Универсальные процессоры
Предназначены для решения широкого круга задач.
Микроконтроллеры, назначение, структура
Лекция 2
3
Лекция 2
3
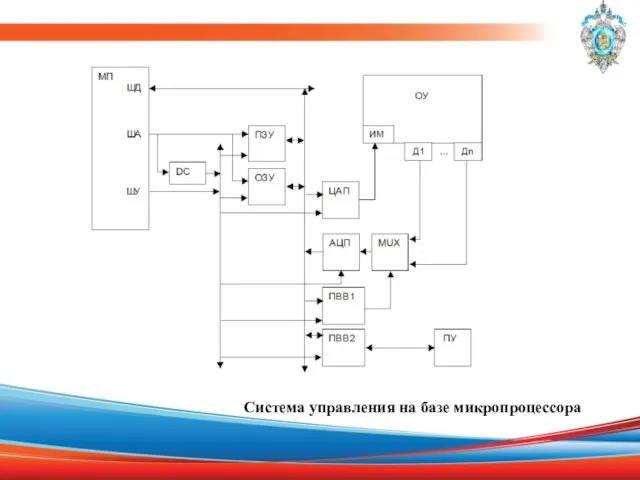
Система управления на базе микропроцессора
Система управления на базе микропроцессора
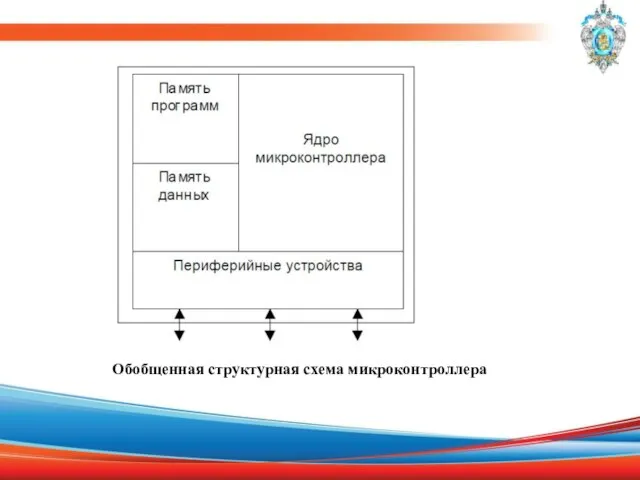
Обобщенная структурная схема микроконтроллера
Обобщенная структурная схема микроконтроллера
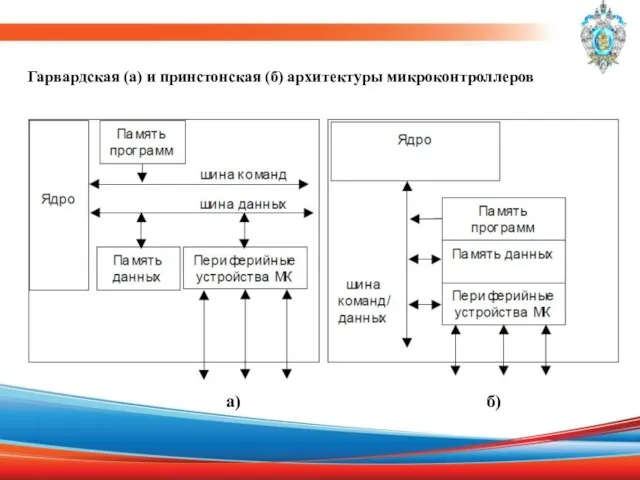
Гарвардская (а) и принстонская (б) архитектуры микроконтроллеров
а)
б)
Гарвардская (а) и принстонская (б) архитектуры микроконтроллеров
а)
б)
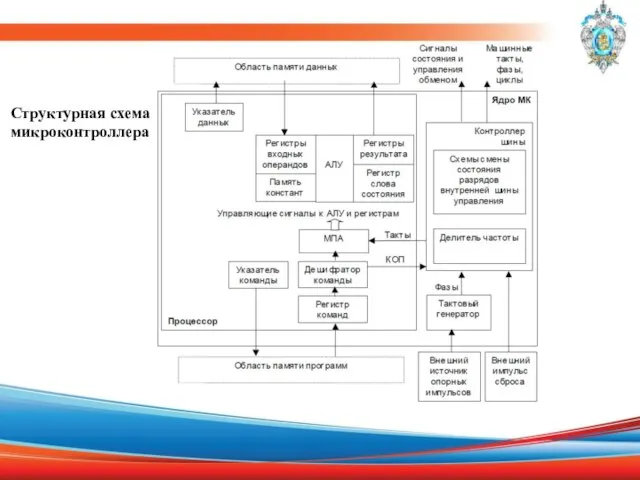
Структурная схема
микроконтроллера
Структурная схема
микроконтроллера
Микроконтроллеры
Микроконтроллер (МК) –это разновидность микропроцессора, ориентированная на реализацию алгоритмов управления техническими
Микроконтроллеры
Микроконтроллер (МК) –это разновидность микропроцессора, ориентированная на реализацию алгоритмов управления техническими
Типы МК:
8-ми разрядные МК. Наиболее многочисленная группа. Это простые и
Типы МК:
8-ми разрядные МК. Наиболее многочисленная группа. Это простые и
Фон Неймановская (Принстонская)
архитектура
Гарвардская архитектура
Фон Неймановская (Принстонская)
архитектура
Гарвардская архитектура
Обобщенная структурная схема микроконтроллера
Обобщенная структурная схема микроконтроллера
Отличительные признаки микроконтроллеров:
Модульный способ организации. На основе одного ядра проектируется
Отличительные признаки микроконтроллеров:
Модульный способ организации. На основе одного ядра проектируется
Процессорное ядро микроконтроллера включает:
ЦП
Внутренние магистрали адреса, данных и управления (внутриконтроллерные магистрали,
Процессорное ядро микроконтроллера включает:
ЦП
Внутренние магистрали адреса, данных и управления (внутриконтроллерные магистрали,
Память МК
В МК используется три основных вида памяти.
1.память программ – ПЗУ,
Память МК
В МК используется три основных вида памяти.
1.память программ – ПЗУ,

Память данных
Как правило, выполняется на основе статического ОЗУ.
Содержимое ячеек ОЗУ сохраняется
Память данных
Как правило, выполняется на основе статического ОЗУ.
Содержимое ячеек ОЗУ сохраняется
Таймеры-счетчики микроконтроллеров
Лекция 3.
3
Лекция 3.
3
Для эффективного управления в режиме реального времени МК должен решать следующие
Для эффективного управления в режиме реального времени МК должен решать следующие
Режимы работы счетчика
1.Режим таймера – отсчет времени через подсчет внутренних импульсов
Режимы работы счетчика
1.Режим таймера – отсчет времени через подсчет внутренних импульсов
Функциональная схема типичного таймера-счетчика
Функциональная схема типичного таймера-счетчика
Измерение временного интервала с помощью обычного таймера
t1 – разрешение счета; t2
Измерение временного интервала с помощью обычного таймера
t1 – разрешение счета; t2
Для измерения временного интервала выполняется следующая последовательность действий:
1. прерывается выполнение текущей
Для измерения временного интервала выполняется следующая последовательность действий:
1. прерывается выполнение текущей
Усовершенствование таймеров-счетчиков
Лекция 4.
3
Лекция 4.
3
Усовершенствование модуля таймера-счетчика
Осуществляется путем введения в структуру таймера-счетчика дополнительных аппаратных
Усовершенствование модуля таймера-счетчика
Осуществляется путем введения в структуру таймера-счетчика дополнительных аппаратных
Канал входного захвата
Канал входного захвата
Детектор событий следит за уровнем напряжения на одном из входов МК.
Измерение временного интервала с помощью канала входного захвата
t1, t2 –
Измерение временного интервала с помощью канала входного захвата
t1, t2 –
При изменении уровня входного сигнала с 0 на 1 код счетчика
При изменении уровня входного сигнала с 0 на 1 код счетчика
Канал выходного сравнения
Канал выходного сравнения
Канал выходного сравнения
Компаратор сравнивает текущий код счетчика таймера с кодом, который
Канал выходного сравнения
Компаратор сравнивает текущий код счетчика таймера с кодом, который
Формирование временного интервала заданной длительности
Tx = K2 – K1
Tx > t
Формирование временного интервала заданной длительности
Tx = K2 – K1
Tx > t
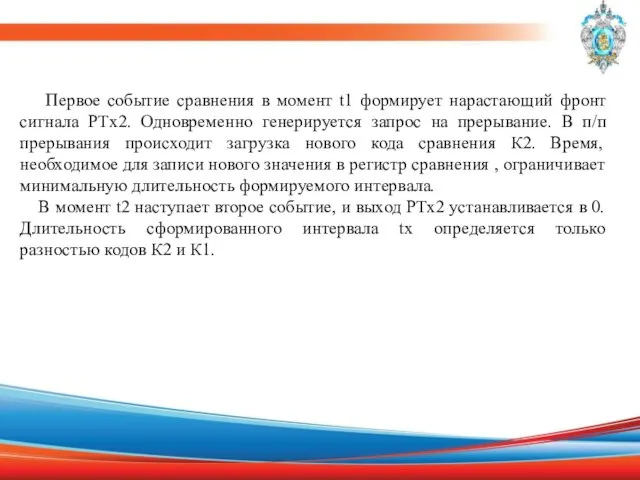
Первое событие сравнения в момент t1 формирует нарастающий фронт сигнала
Первое событие сравнения в момент t1 формирует нарастающий фронт сигнала
Процессор событий, WDT, АЦП
Лекция 5.
3
Лекция 5.
3
Процессоры событий -программируемый счетный массив (Programmable Counter Array, PCA).
Усовершенствованный таймер позволяет
Процессоры событий -программируемый счетный массив (Programmable Counter Array, PCA).
Усовершенствованный таймер позволяет
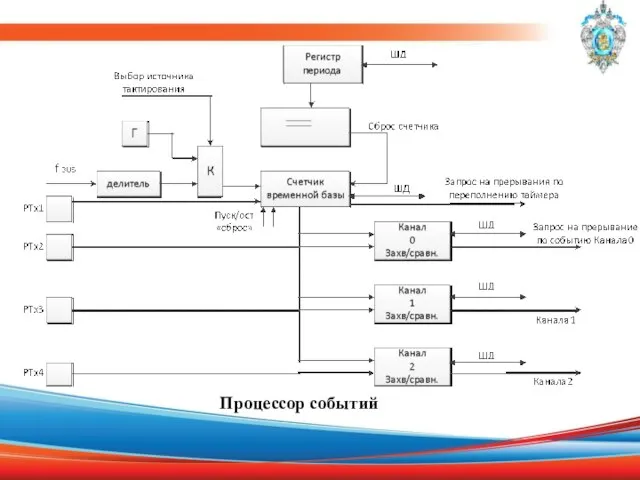
Процессор событий
Процессор событий
.
Режим ШИМ
В режиме ШИМ на соответствующем выводе МК формируется последовательность
.
Режим ШИМ
В режиме ШИМ на соответствующем выводе МК формируется последовательность
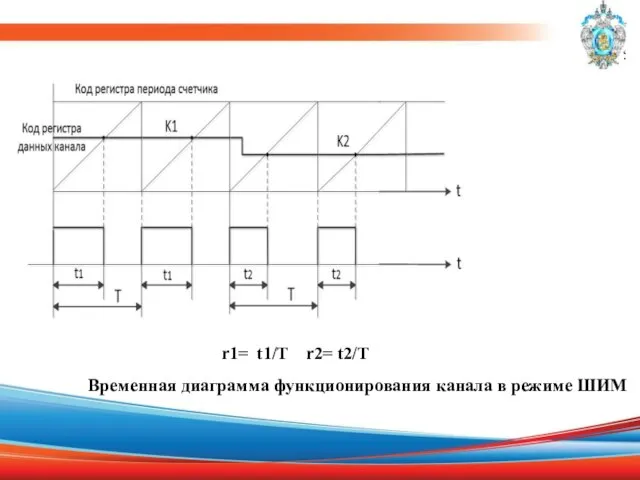
Временная диаграмма функционирования канала в режиме ШИМ
;
r1= t1/T
Временная диаграмма функционирования канала в режиме ШИМ
;
r1= t1/T
Сторожевой таймер (WDT – Watchdog Timer)
Обеспечивает перезагрузку процессора при зависании
Сторожевой таймер (WDT – Watchdog Timer)
Обеспечивает перезагрузку процессора при зависании
Временная диаграмма функционирования сторожевого таймера
Временная диаграмма функционирования сторожевого таймера

Структурная схема сторожевого таймера
Структурная схема сторожевого таймера
Синхронизация МК, схема формирования сигнала сброса
Лекция 7 .
3
Лекция 7 .
3
Аппаратные средства обеспечения надежной работы МК
Прикладная программа, записанная в память
Аппаратные средства обеспечения надежной работы МК
Прикладная программа, записанная в память
Схема формирования сигнала сброса МК
При включении напряжения питания МК должен начать
Схема формирования сигнала сброса МК
При включении напряжения питания МК должен начать
Сразу после выхода из состояния сброса МК выполняет следующие действия:
- запускает
Сразу после выхода из состояния сброса МК выполняет следующие действия:
- запускает
Схемы формирования сигнала внешнего сброса с высоким активным уровнем (а) и
Схемы формирования сигнала внешнего сброса с высоким активным уровнем (а) и
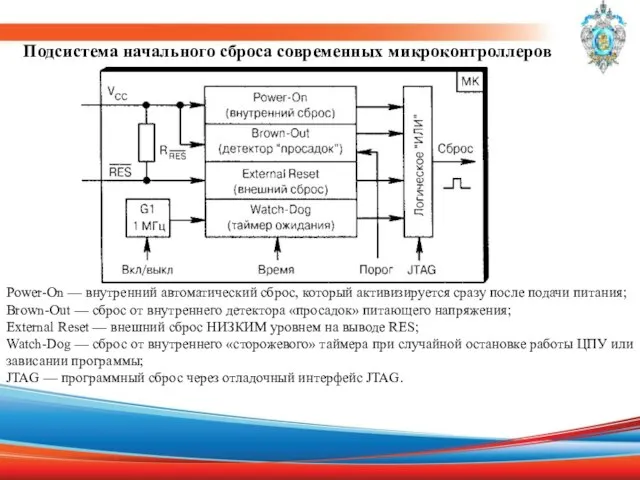
Подсистема начального сброса современных микроконтроллеров
Power-On — внутренний автоматический сброс, который активизируется
Подсистема начального сброса современных микроконтроллеров
Power-On — внутренний автоматический сброс, который активизируется
Модули аналогового ввода/вывода
Необходимость приема и формирования аналоговых сигналов требует наличия
Модули аналогового ввода/вывода
Необходимость приема и формирования аналоговых сигналов требует наличия

Встроенный аналоговый компаратор
Встроенный аналоговый компаратор
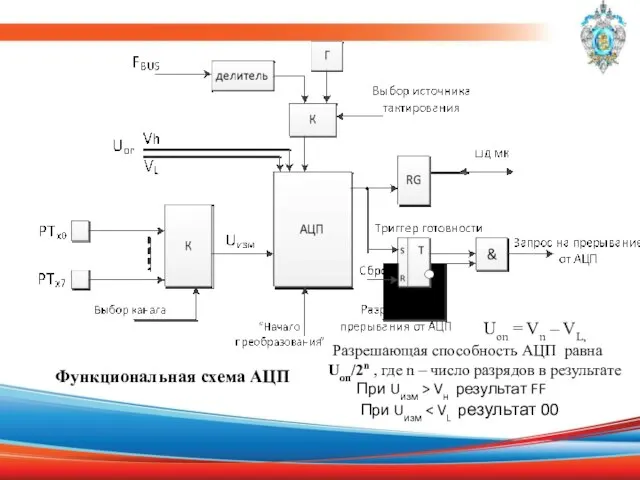
Функциональная схема АЦП
Uon = Vn – VL,
Разрешающая способность
Функциональная схема АЦП
Uon = Vn – VL,
Разрешающая способность
Минимизация энергопотребления, синхронизация
Лекция 6.
3
Лекция 6.
3
Минимизация энергопотребления в системах на основе МК
Малый уровень энергопотребления является
Минимизация энергопотребления в системах на основе МК
Малый уровень энергопотребления является
Основные режимы работы микроконтроллеров
-Активный режим (Run mode) — основной режим работы
Основные режимы работы микроконтроллеров
-Активный режим (Run mode) — основной режим работы
Основные группы МК в зависимости от диапазона питающих напряжений
МК с напряжением
Основные группы МК в зависимости от диапазона питающих напряжений
МК с напряжением
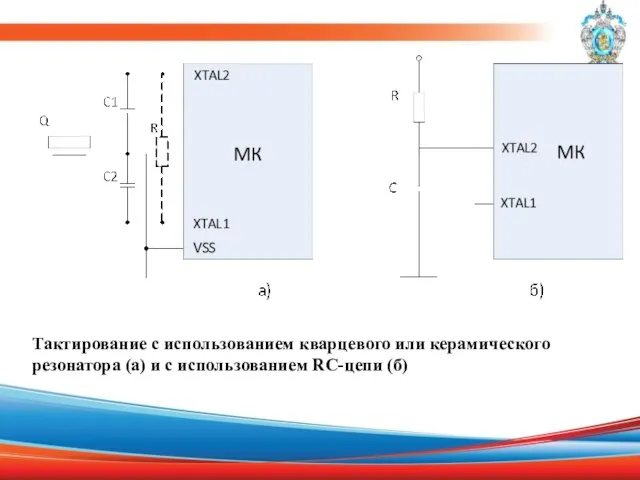
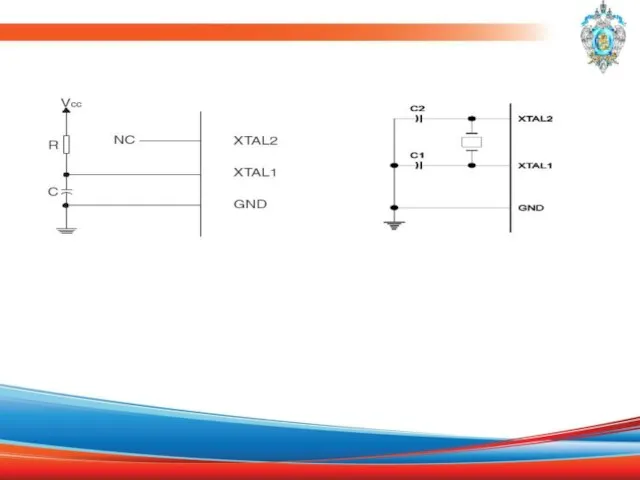
Тактирование с использованием кварцевого или керамического резонатора (а) и с использованием
Тактирование с использованием кварцевого или керамического резонатора (а) и с использованием
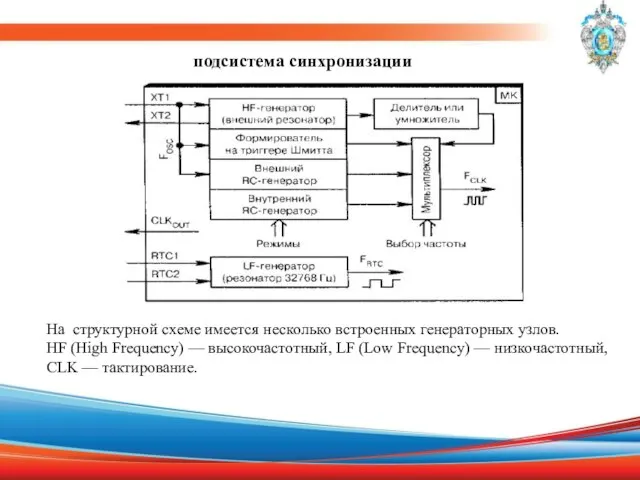
подсистема синхронизации
На структурной схеме имеется несколько встроенных генераторных узлов.
HF
подсистема синхронизации
На структурной схеме имеется несколько встроенных генераторных узлов.
HF

внутреннее устройство генератора
инвертирующий усилитель A1;
буферный логический формирователь на триггере Шмитта
внутреннее устройство генератора
инвертирующий усилитель A1;
буферный логический формирователь на триггере Шмитта
В МК произошло функциональное разделение генератора синхронизации, который выделился в отдельный
В МК произошло функциональное разделение генератора синхронизации, который выделился в отдельный
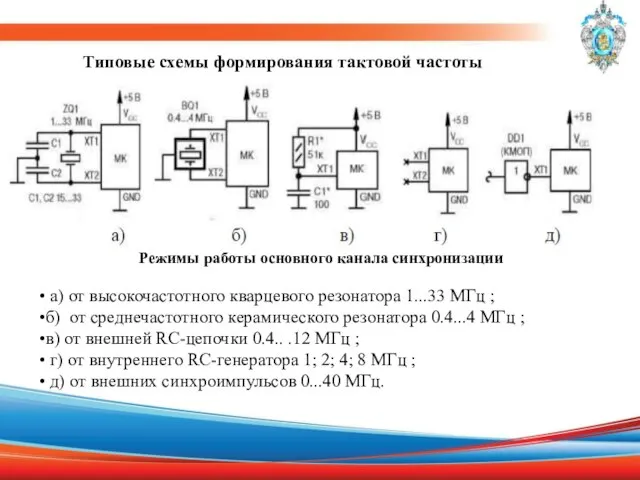
Режимы работы основного канала синхронизации
• а) от высокочастотного кварцевого резонатора 1...33
Режимы работы основного канала синхронизации
• а) от высокочастотного кварцевого резонатора 1...33
Пример схемы синхронизации современных микроконтроллеров AVR
Источники тактового сигнала для микроконтроллеров AVR
1)Настраиваемый
Пример схемы синхронизации современных микроконтроллеров AVR
Источники тактового сигнала для микроконтроллеров AVR
1)Настраиваемый
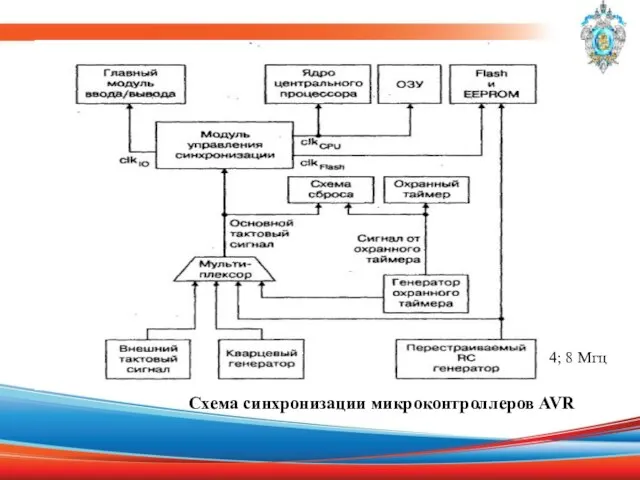
Схема синхронизации микроконтроллеров AVR
4; 8 Мгц
Схема синхронизации микроконтроллеров AVR
4; 8 Мгц
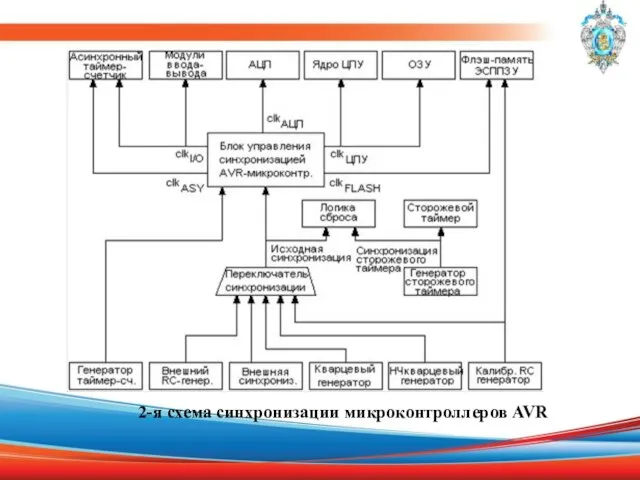
2-я схема синхронизации микроконтроллеров AVR
2-я схема синхронизации микроконтроллеров AVR
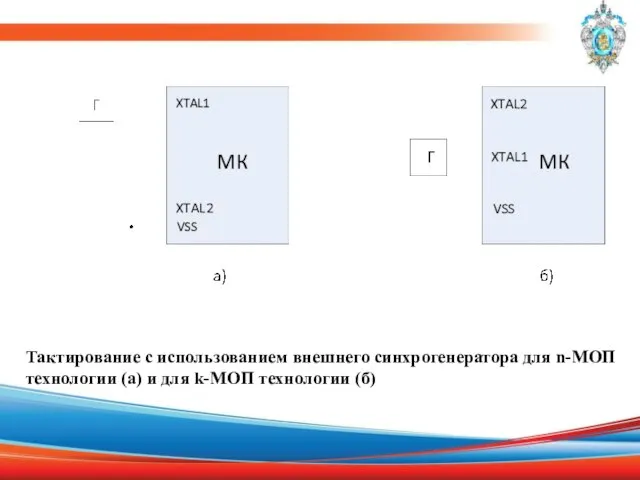
Тактирование с использованием внешнего синхрогенератора для n-МОП технологии (а) и для
Тактирование с использованием внешнего синхрогенератора для n-МОП технологии (а) и для
Производительность (MIPS) = 1/ t ком (мкс) определяется по самой быстрой
Производительность (MIPS) = 1/ t ком (мкс) определяется по самой быстрой
RISC МК имеют большую производительность по сравнению с CISC при одной
RISC МК имеют большую производительность по сравнению с CISC при одной
Модуль прерываний МК
Запросы прерывания могут поступать как от внешних источников, так
Модуль прерываний МК
Запросы прерывания могут поступать как от внешних источников, так
Могут быть МК с одноуровневой системой приоритетов (все запросы равноценны), многоуровневой
Могут быть МК с одноуровневой системой приоритетов (все запросы равноценны), многоуровневой
Параллельный и последовательный ввод-вывод в МК
Лекция 8
3
Лекция 8
3
Порты параллельного ввода/вывода
Различают следующие типы параллельных портов:
- однонаправленные порты, предназначенные
Порты параллельного ввода/вывода
Различают следующие типы параллельных портов:
- однонаправленные порты, предназначенные
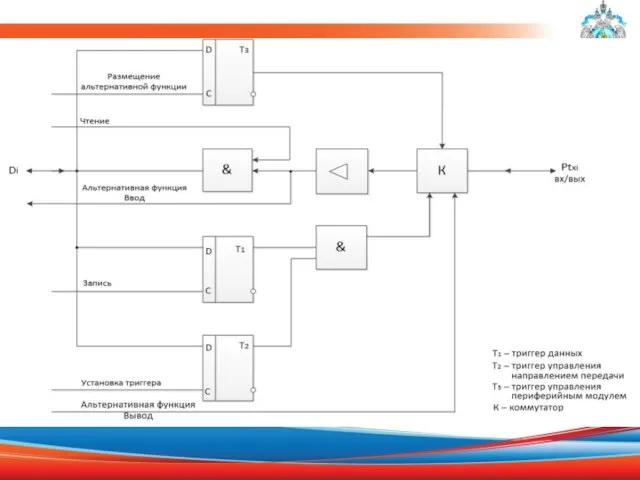
Схема управления одним разрядом параллельного порта ввода вывода
Схема управления одним разрядом параллельного порта ввода вывода
Модули последовательного ввода/вывода
Задачи, которые решаются средствами модуля контроллера последовательного ввода/вывода
- связь
Модули последовательного ввода/вывода
Задачи, которые решаются средствами модуля контроллера последовательного ввода/вывода
- связь
МОДУЛЬ UART
. Среди различных типов встроенных контроллеров последовательного обмена, которые входят
. Среди различных типов встроенных контроллеров последовательного обмена, которые входят

Для асинхронного режима принят следующий ряд стандартных скоростей обмена: 50, 75,
Для асинхронного режима принят следующий ряд стандартных скоростей обмена: 50, 75,
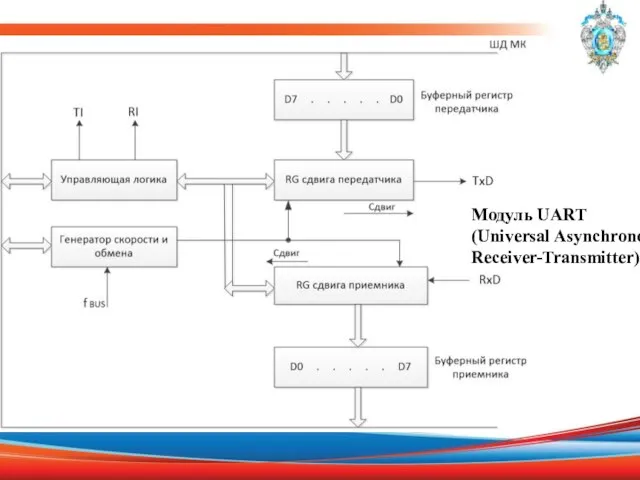
Модуль UART (Universal Asynchronous Receiver-Transmitter)
Модуль UART (Universal Asynchronous Receiver-Transmitter)
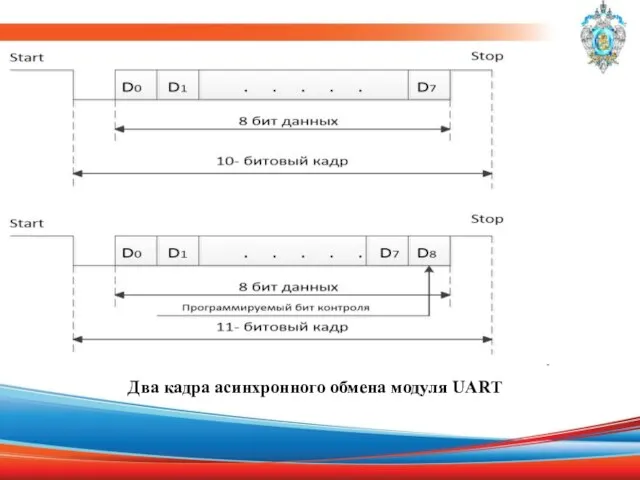
Два кадра асинхронного обмена модуля UART
Два кадра асинхронного обмена модуля UART

Микроконтроллерная система, использующая модуль UART
Микроконтроллерная система, использующая модуль UART
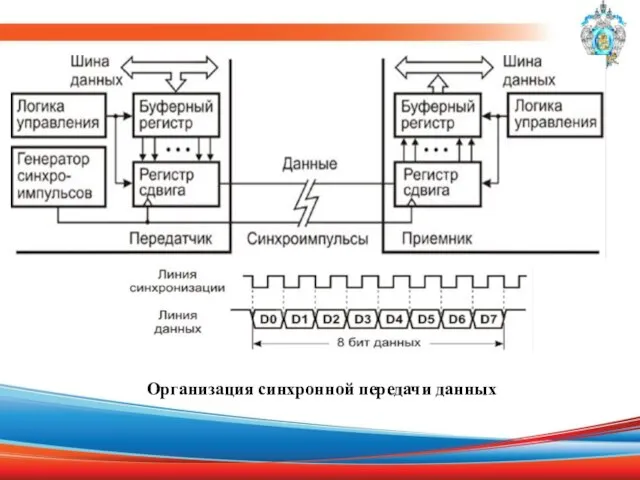
Организация синхронной передачи данных
Организация синхронной передачи данных
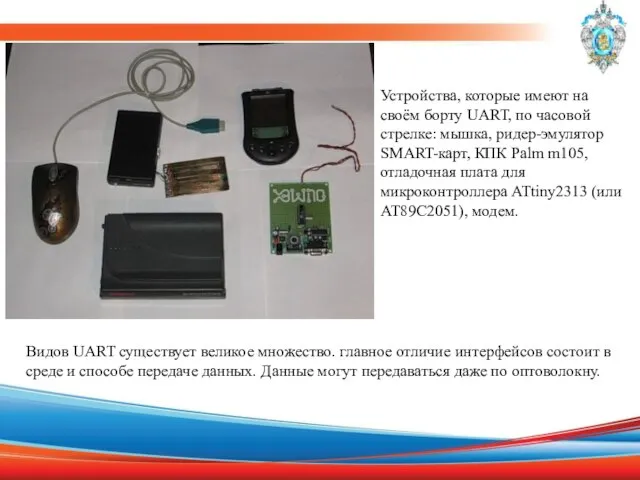
Устройства, которые имеют на своём борту UART, по часовой стрелке: мышка,
Устройства, которые имеют на своём борту UART, по часовой стрелке: мышка,
Интерфейс SPI
Лекция 9.
3
Лекция 9.
3
SPI (. Serial Peripheral Interface, SPI bus — последовательный периферийный интерфейс, шина SPI) —
SPI (. Serial Peripheral Interface, SPI bus — последовательный периферийный интерфейс, шина SPI) —
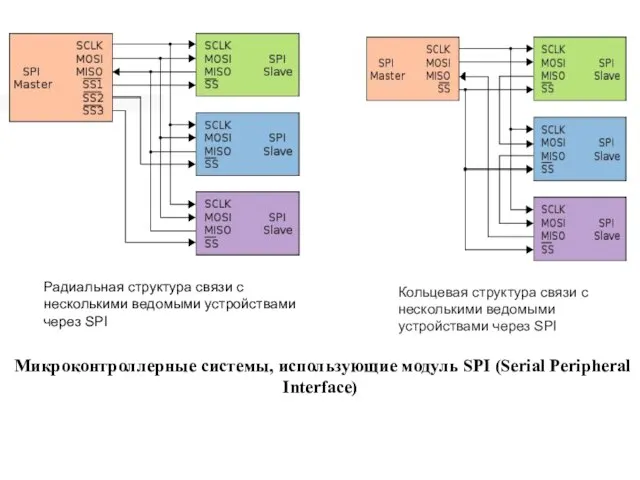
Микроконтроллерные системы, использующие модуль SPI (Serial Peripheral Interface)
Кольцевая структура связи
Микроконтроллерные системы, использующие модуль SPI (Serial Peripheral Interface)
Кольцевая структура связи
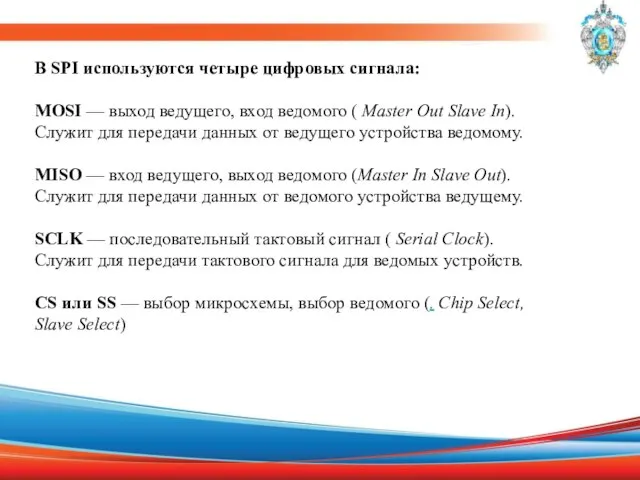
В SPI используются четыре цифровых сигнала:
MOSI — выход ведущего, вход ведомого ( Master
В SPI используются четыре цифровых сигнала:
MOSI — выход ведущего, вход ведомого ( Master
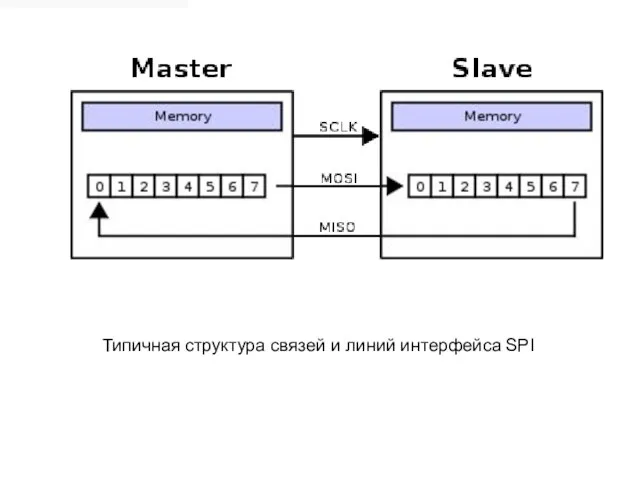
Типичная структура связей и линий интерфейса SPI
Типичная структура связей и линий интерфейса SPI
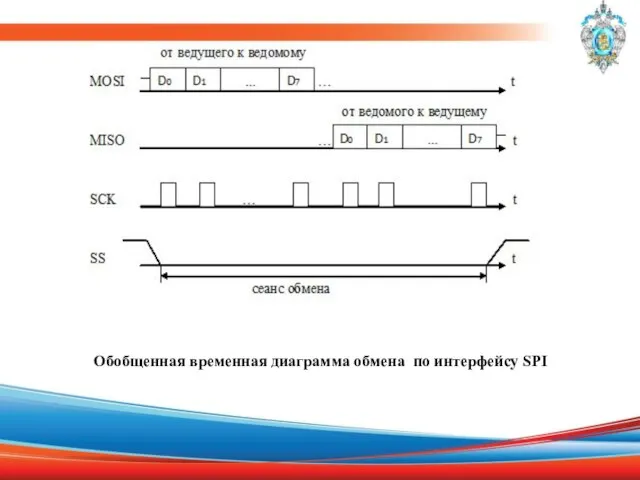
Обобщенная временная диаграмма обмена по интерфейсу SPI
Обобщенная временная диаграмма обмена по интерфейсу SPI
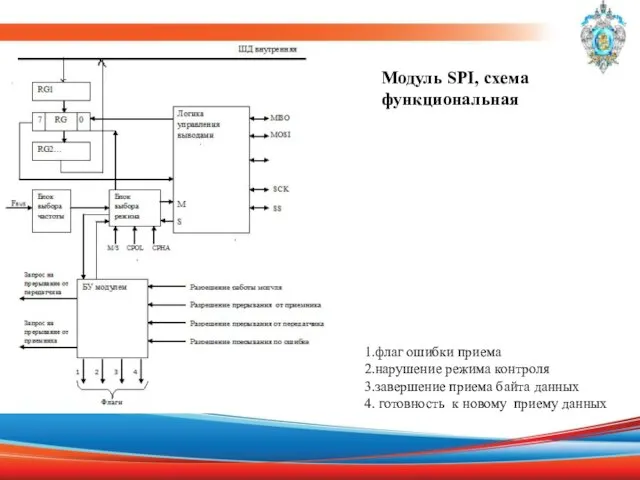
Модуль SPI, схема функциональная
1.флаг ошибки приема
2.нарушение режима контроля
3.завершение приема байта данных
Модуль SPI, схема функциональная
1.флаг ошибки приема
2.нарушение режима контроля
3.завершение приема байта данных
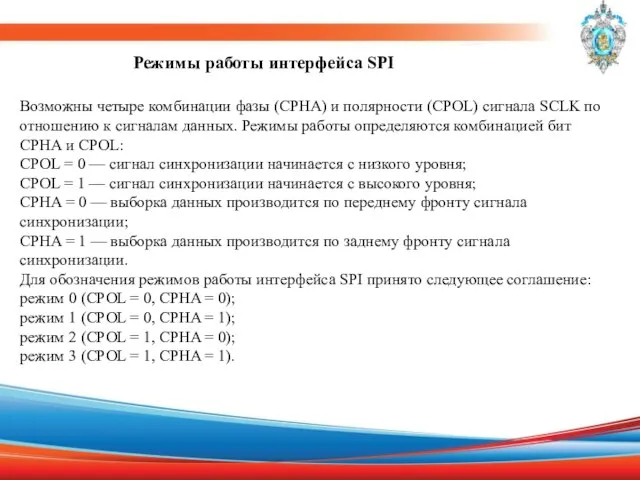
Режимы работы интерфейса SPI
Возможны четыре комбинации фазы (CPHA) и полярности (CPOL)
Режимы работы интерфейса SPI
Возможны четыре комбинации фазы (CPHA) и полярности (CPOL)
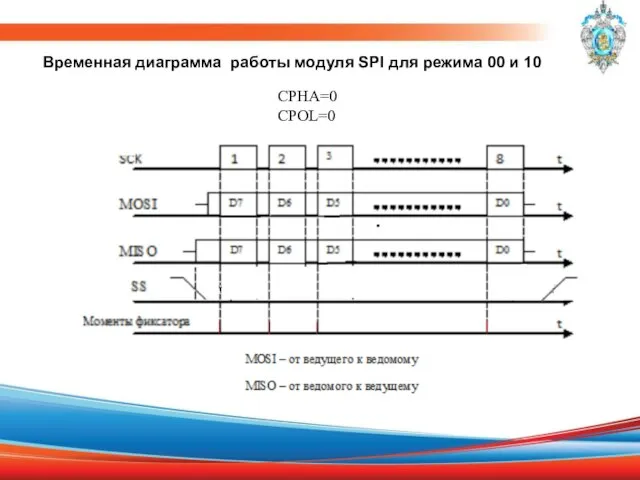
CPHA=0
CPOL=0
Временная диаграмма работы модуля SPI для режима 00 и
CPHA=0
CPOL=0
Временная диаграмма работы модуля SPI для режима 00 и
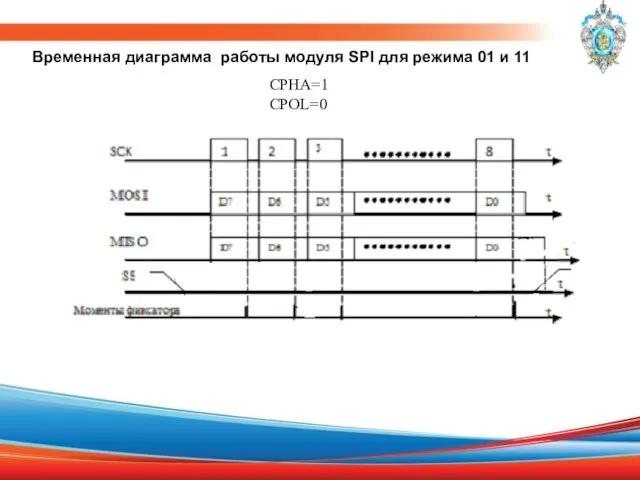
CPHA=1
CPOL=0
Временная диаграмма работы модуля SPI для режима 01 и 11
CPHA=1
CPOL=0
Временная диаграмма работы модуля SPI для режима 01 и 11
SS ведомый СРНА=0
SS ведомый СРНА=1
SS ведущий
Байт n
МО
Передача нескольких байтов в любом
SS ведомый СРНА=0
SS ведомый СРНА=1
SS ведущий
Байт n
МО
Передача нескольких байтов в любом
Интерфейс I2C
Лекция 10.
3
Лекция 10.
3
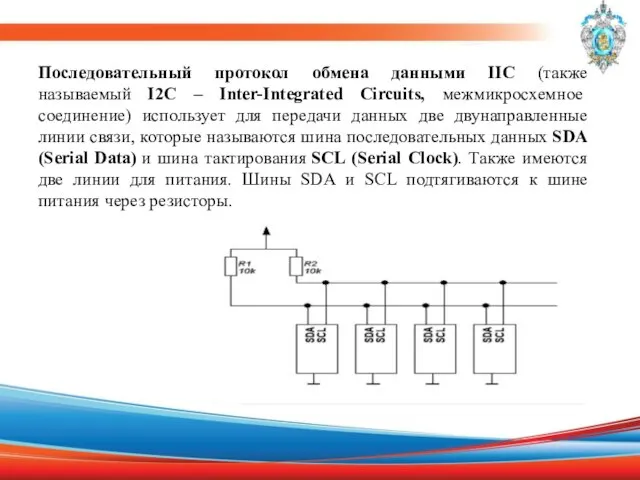
Последовательный протокол обмена данными IIC (также называемый I2C – Inter-Integrated Circuits,
Последовательный протокол обмена данными IIC (также называемый I2C – Inter-Integrated Circuits,
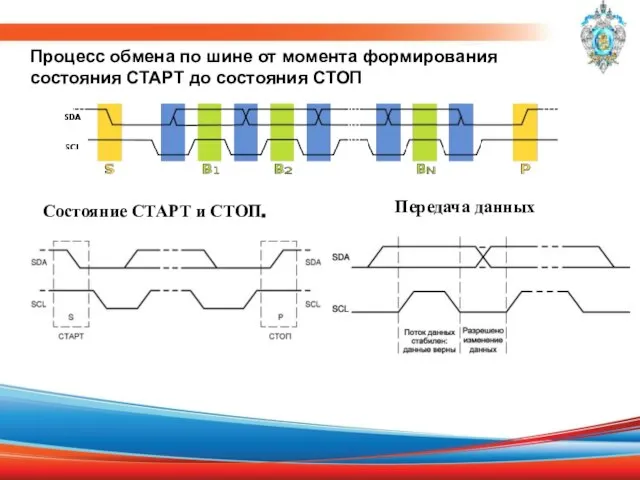
Состояние СТАРТ и СТОП.
Передача данных
Процесс обмена по шине от момента
Состояние СТАРТ и СТОП.
Передача данных
Процесс обмена по шине от момента
Начало передачи определяется Start последовательностью — провал SDA при высоком уровне
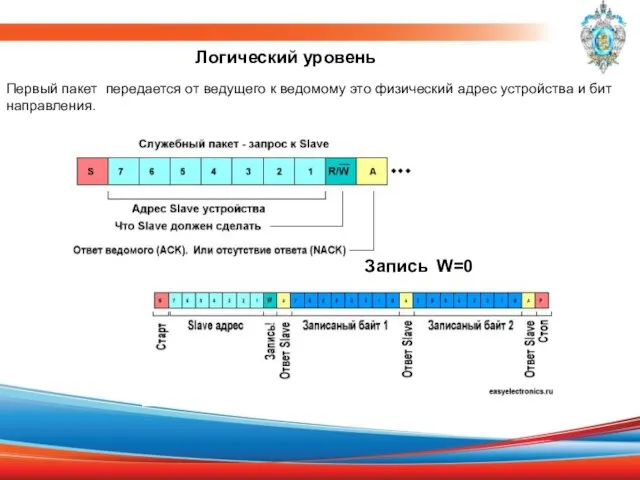
Логический уровень
Первый пакет передается от ведущего к ведомому это физический адрес
Логический уровень
Первый пакет передается от ведущего к ведомому это физический адрес
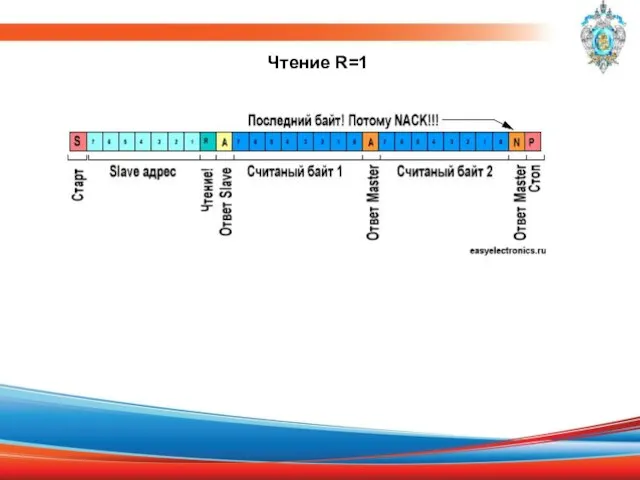
Чтение R=1
Чтение R=1
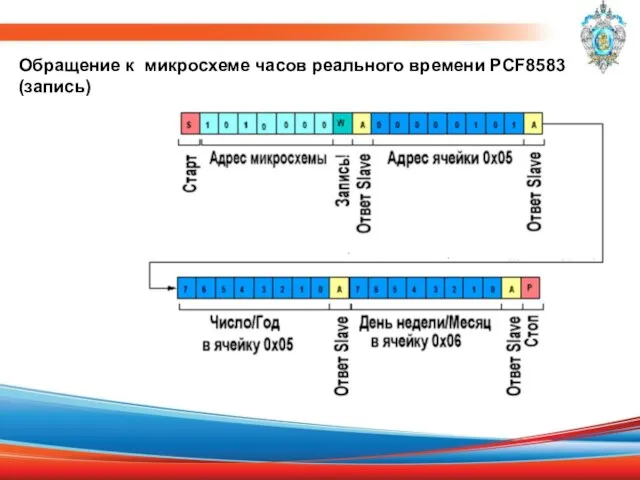
Обращение к микросхеме часов реального времени PCF8583
(запись)
Обращение к микросхеме часов реального времени PCF8583
(запись)
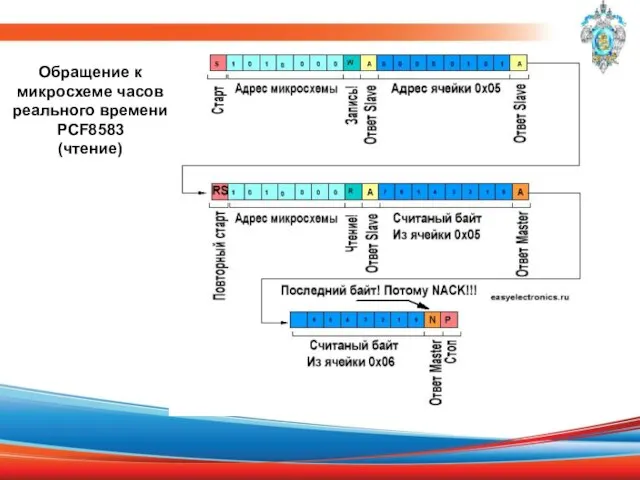
Обращение к микросхеме часов реального времени PCF8583
(чтение)
Обращение к микросхеме часов реального времени PCF8583
(чтение)
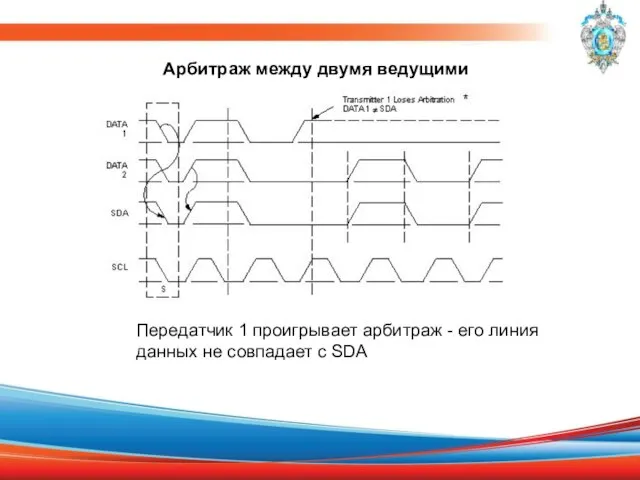
Арбитраж между двумя ведущими
Передатчик 1 проигрывает арбитраж - его линия
Арбитраж между двумя ведущими
Передатчик 1 проигрывает арбитраж - его линия
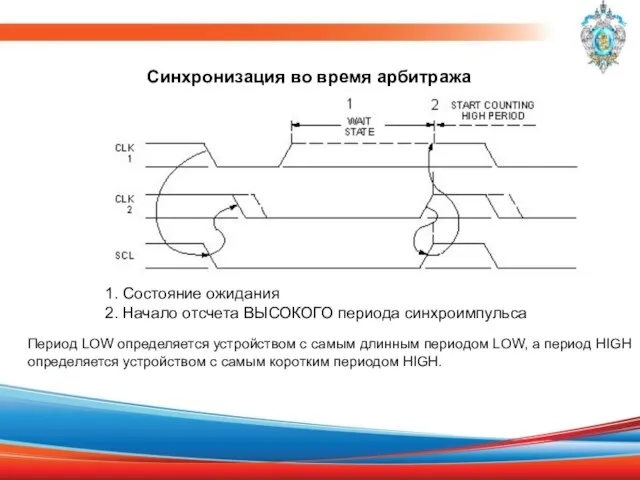
Синхронизация во время арбитража
1. Состояние ожидания
2. Начало отсчета ВЫСОКОГО периода
Синхронизация во время арбитража
1. Состояние ожидания
2. Начало отсчета ВЫСОКОГО периода
CAN-шина и протокол (Control Area Network)
Лекция 11
3
Лекция 11
3
Шина CAN была предложена Робертом Бошем (Robert Bosch) в 80-х годах
Шина CAN была предложена Робертом Бошем (Robert Bosch) в 80-х годах
Основные характеристики CAN сети
1) Среда передачи данных в CAN не определена
Основные характеристики CAN сети
1) Среда передачи данных в CAN не определена
Зависимость скорости обмена от длины линии передачи
Зависимость скорости обмена от длины линии передачи
CAN контроллеры соединяются с помощью дифференциальной шины, которая имеет две линии
CAN контроллеры соединяются с помощью дифференциальной шины, которая имеет две линии
Типы фреймов (сообщений) в CAN-протоколе
фрейм данных (data frame) перемещает данные с
Типы фреймов (сообщений) в CAN-протоколе фрейм данных (data frame) перемещает данные с
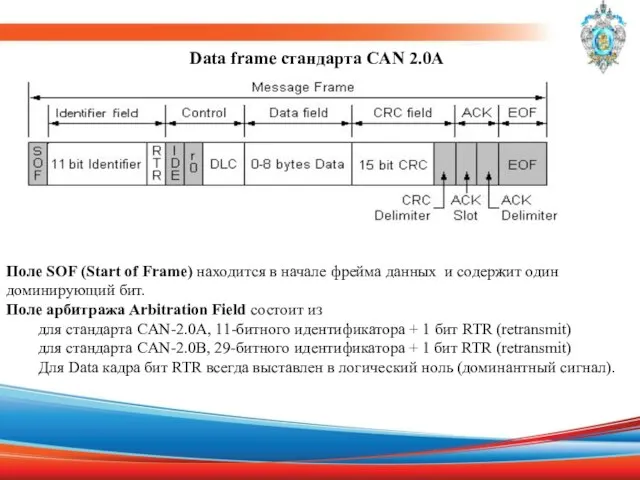
Data frame стандарта CAN 2.0A
Поле SOF (Start of Frame) находится
Data frame стандарта CAN 2.0A
Поле SOF (Start of Frame) находится
Управляющее поле (Control Field) содержит 6 битов, из которых 4 бита
Управляющее поле (Control Field) содержит 6 битов, из которых 4 бита
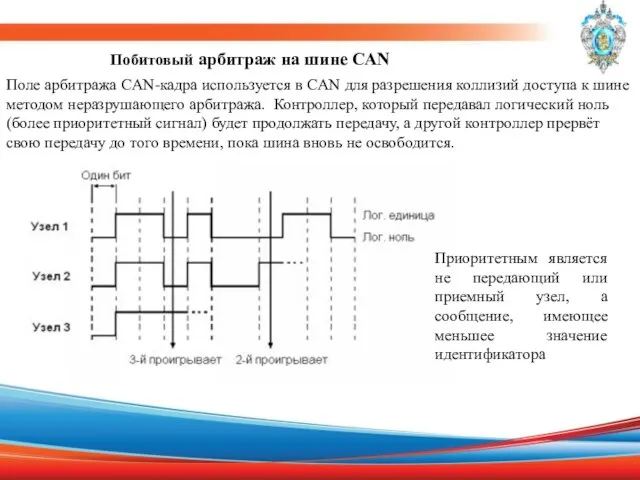
Побитовый арбитраж на шине САN
Поле арбитража CAN-кадра используется в CAN для
Побитовый арбитраж на шине САN
Поле арбитража CAN-кадра используется в CAN для
Разрядная ошибка Bit monitoring появляется, когда передатчик сравнивает уровень на шине
Разрядная ошибка Bit monitoring появляется, когда передатчик сравнивает уровень на шине
Механизм ограничения ошибок
Каждый узел ведет два счетчика ошибок: Transmit Error
Механизм ограничения ошибок
Каждый узел ведет два счетчика ошибок: Transmit Error
Адресация в CAN-протоколе
Типы входных фильтров:
фиксированные — фильтры, которые требуют, чтобы биты
Адресация в CAN-протоколе
Типы входных фильтров:
фиксированные — фильтры, которые требуют, чтобы биты
Прерывания в CAN-протоколе
Так как фрейм данных в CAN-протоколе короткий (от
Прерывания в CAN-протоколе
Так как фрейм данных в CAN-протоколе короткий (от
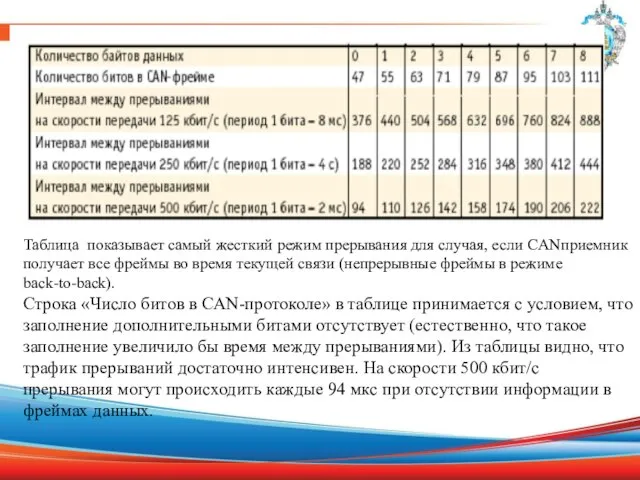
Таблица показывает самый жесткий режим прерывания для случая, если CANприемник получает
Таблица показывает самый жесткий режим прерывания для случая, если CANприемник получает
Большинство микроконтроллеров нижнего уровня не может поддерживать такую высокую скорость обработки
Большинство микроконтроллеров нижнего уровня не может поддерживать такую высокую скорость обработки
Микросхемы, которые поддерживают CAN-протокол, выпускаются различными поставщиками, такими как Philips, Motorola,
Микросхемы, которые поддерживают CAN-протокол, выпускаются различными поставщиками, такими как Philips, Motorola,
Применение в индустриальных приложениях
В настоящее время СAN-протокол активно используется в индустриальных
Применение в индустриальных приложениях
В настоящее время СAN-протокол активно используется в индустриальных
Микроконтроллеры семейств PIC
(Peripheral Interface Controller) компании Microchip
Лекция 12
3
(Peripheral Interface Controller) компании Microchip
Лекция 12
3
Основных семейств 8-разрядных RISC-микроконтроллеров
PIC12CXXX – семейство микроконтроллеров, выпускаемых в миниатюрном 8-выводном
Основных семейств 8-разрядных RISC-микроконтроллеров
PIC12CXXX – семейство микроконтроллеров, выпускаемых в миниатюрном 8-выводном
PIC17CXXX – семейство высокопроизводительных микроконтроллеров с расширенной системой команд 16-разрядного формата
PIC17CXXX – семейство высокопроизводительных микроконтроллеров с расширенной системой команд 16-разрядного формата
Общие сведения о микроконтроллерах семейства PIC16CXXX
Микроконтроллеры семейства PIC16CXXX, выполненные по технологии
Общие сведения о микроконтроллерах семейства PIC16CXXX
Микроконтроллеры семейства PIC16CXXX, выполненные по технологии
PIC-контроллеры имеют от 12 до 33 линий цифрового ввода-вывода, причем
PIC-контроллеры имеют от 12 до 33 линий цифрового ввода-вывода, причем
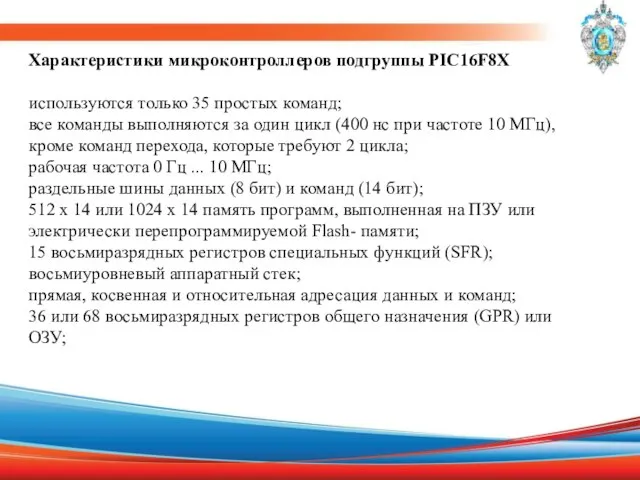
Характеристики микроконтроллеров подгруппы PIC16F8X
используются только 35 простых команд;
все команды выполняются за
Характеристики микроконтроллеров подгруппы PIC16F8X
используются только 35 простых команд;
все команды выполняются за
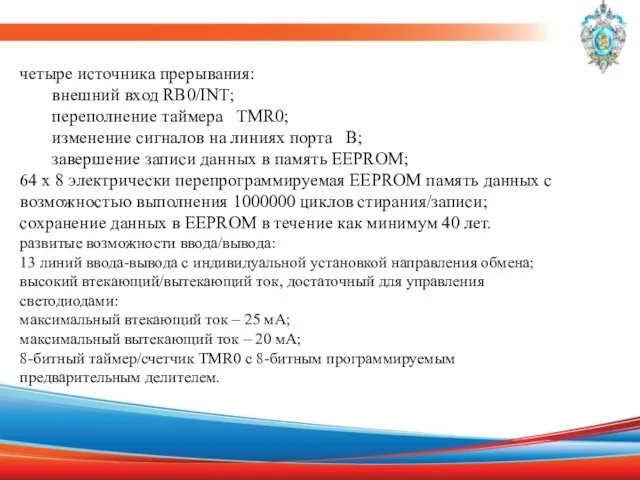
четыре источника прерывания:
внешний вход RB0/INT;
переполнение таймера TMR0;
изменение сигналов на линиях
четыре источника прерывания:
внешний вход RB0/INT;
переполнение таймера TMR0;
изменение сигналов на линиях
Микроконтроллеры семейств PIC
(Peripheral Interface Controller) компании Microchip (продолжение)
Лекция 13
(Peripheral Interface Controller) компании Microchip (продолжение)
Лекция 13
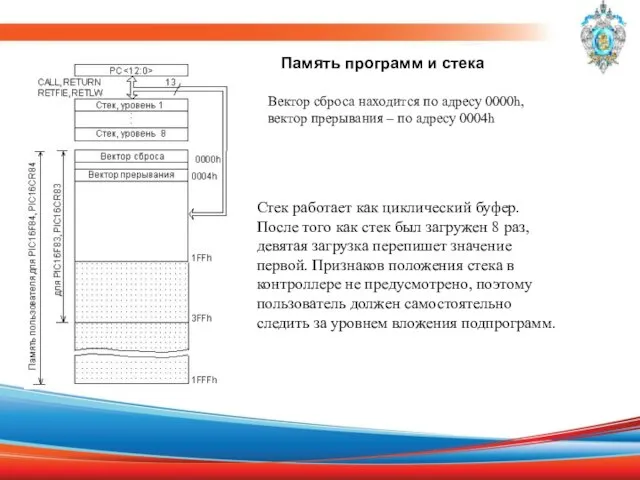
Память программ и стека
Вектор сброса находится по адресу 0000h, вектор прерывания
Память программ и стека
Вектор сброса находится по адресу 0000h, вектор прерывания
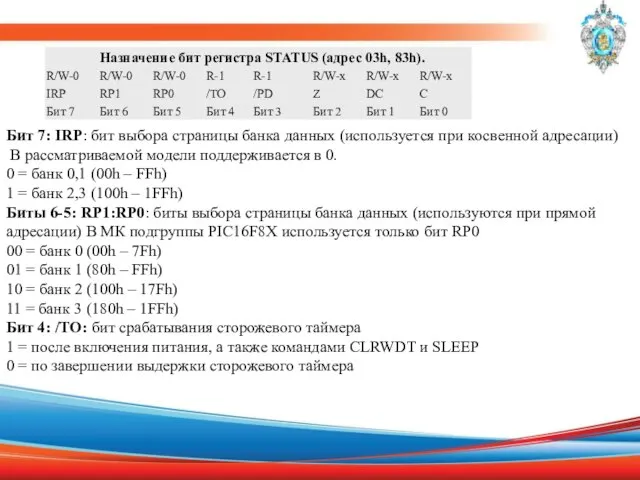
Бит 7: IRP: бит выбора страницы банка данных (используется при косвенной
Бит 7: IRP: бит выбора страницы банка данных (используется при косвенной
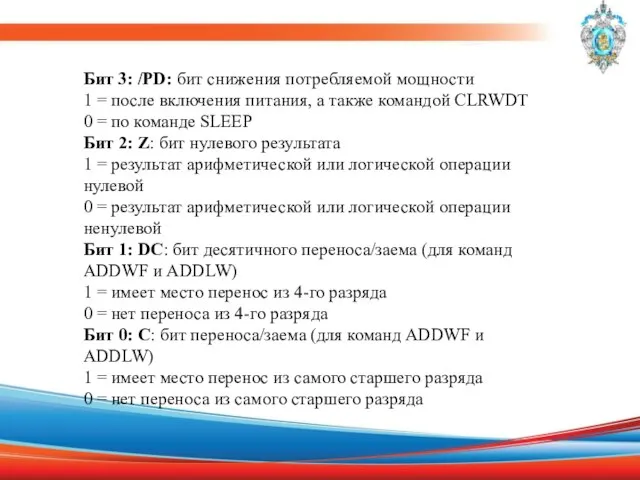
Бит 3: /PD: бит снижения потребляемой мощности
1 = после включения питания,
Бит 3: /PD: бит снижения потребляемой мощности
1 = после включения питания,
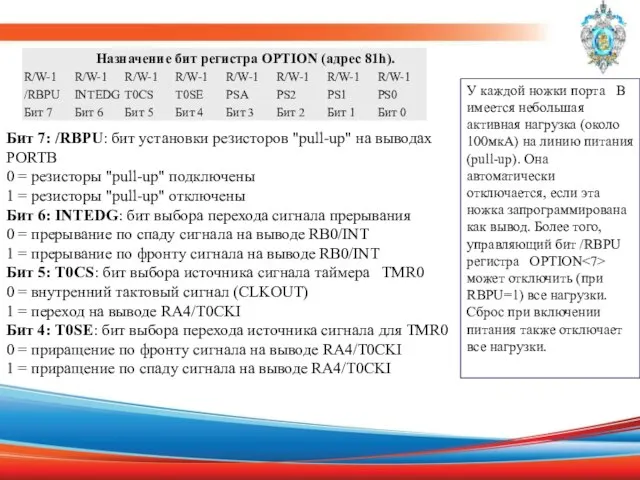
Бит 7: /RBPU: бит установки резисторов "pull-up" на выводах PORTB
0
Бит 7: /RBPU: бит установки резисторов "pull-up" на выводах PORTB
0
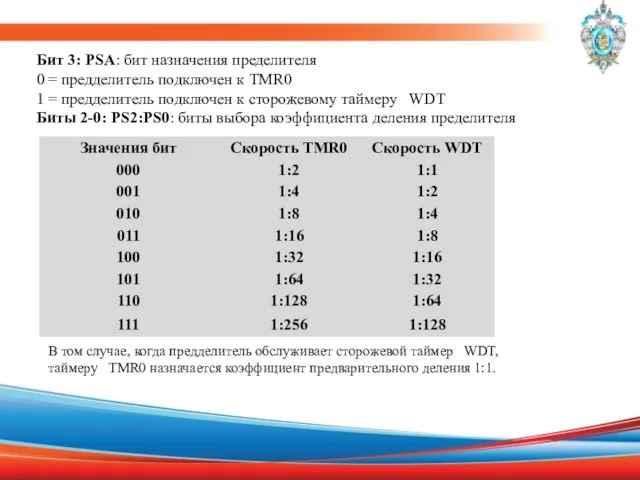
Бит 3: PSA: бит назначения пределителя
0 = предделитель подключен к TMR0
Бит 3: PSA: бит назначения пределителя
0 = предделитель подключен к TMR0
Бит 7: GIE: бит разрешения всех прерываний
0 = запрещены все
Бит 7: GIE: бит разрешения всех прерываний
0 = запрещены все
Бит 3: RBIE: бит разрешения прерываний по изменению PORTB
0 =
Бит 3: RBIE: бит разрешения прерываний по изменению PORTB
0 =
Микроконтроллеры семейств PIC
(Peripheral Interface Controller) компании Microchip (продолжение)
Лекция 14
(Peripheral Interface Controller) компании Microchip (продолжение)
Лекция 14
Счетчик команд
Счетчик команд PCL и PCLATH имеет разрядность 13 бит. Младший
Счетчик команд
Счетчик команд PCL и PCLATH имеет разрядность 13 бит. Младший
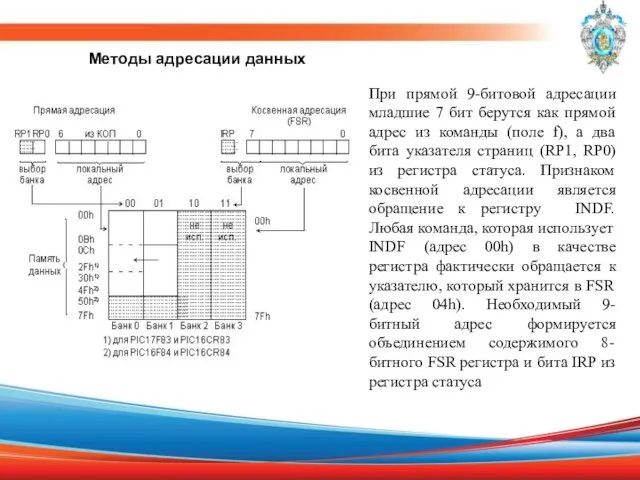
Методы адресации данных
При прямой 9-битовой адресации младшие 7 бит берутся как
Методы адресации данных
При прямой 9-битовой адресации младшие 7 бит берутся как
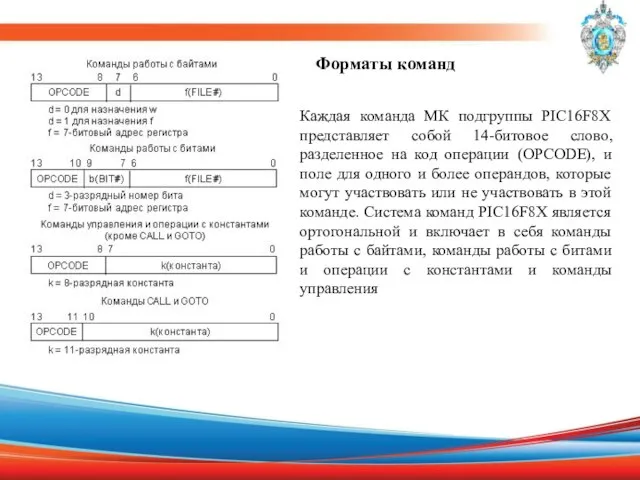
Форматы команд
Каждая команда МК подгруппы PIC16F8X представляет собой 14-битовое слово, разделенное
Форматы команд
Каждая команда МК подгруппы PIC16F8X представляет собой 14-битовое слово, разделенное
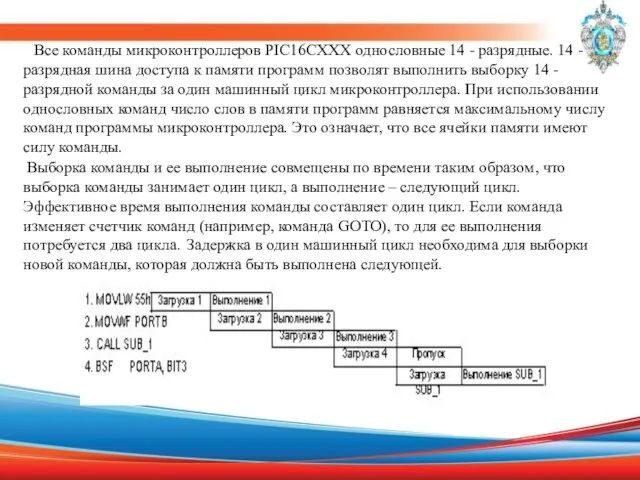
Все команды микроконтроллеров PIC16CXXX однословные 14 - разрядные. 14 -
Все команды микроконтроллеров PIC16CXXX однословные 14 - разрядные. 14 -
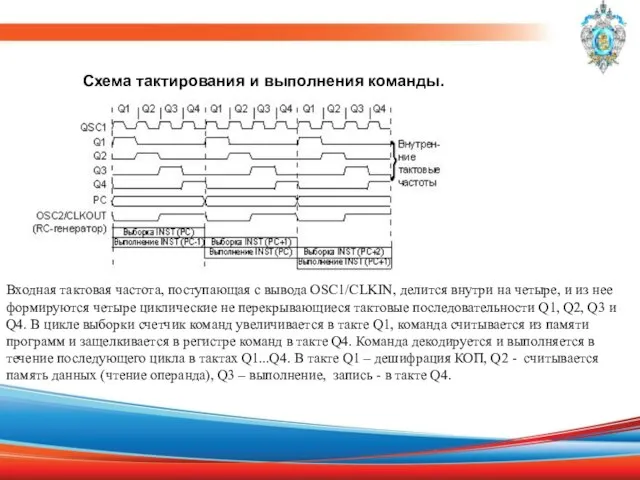
Схема тактирования и выполнения команды.
Входная тактовая частота, поступающая с вывода OSC1/CLKIN,
Схема тактирования и выполнения команды.
Входная тактовая частота, поступающая с вывода OSC1/CLKIN,
Организация прерываний
МК подгруппы PIC16F8X имеют четыре источника прерываний:
внешнее прерывание с вывода
Организация прерываний
МК подгруппы PIC16F8X имеют четыре источника прерываний:
внешнее прерывание с вывода
Порядок действий при возникновении запросов на прерывания
1.Запрос прерывания фиксируется в регистре
Порядок действий при возникновении запросов на прерывания
1.Запрос прерывания фиксируется в регистре
Структура подпрограммы обработки прерывания
Подпрограмма начинается с сохранения содержимого регистров W и
Структура подпрограммы обработки прерывания
Подпрограмма начинается с сохранения содержимого регистров W и
EEPROM память данных доступна для записи/чтения в нормальном режиме работы микроконтроллера
EEPROM память данных доступна для записи/чтения в нормальном режиме работы микроконтроллера
EEPROM память данных позволяет выполнить чтение и запись байта. При записи
EEPROM память данных позволяет выполнить чтение и запись байта. При записи
Назначение бит регистра EECON1 (адреса 88h).
Биты 7:5 не используются (читаются как
Назначение бит регистра EECON1 (адреса 88h).
Биты 7:5 не используются (читаются как
Бит 1: WR: бит управления записью
0 = цикл записи данных в
Бит 1: WR: бит управления записью
0 = цикл записи данных в
Считывание данных из памяти EEPROM
Необходимо записать нужный адрес
Считывание данных из памяти EEPROM
Необходимо записать нужный адрес
Записи в память EEPROM
необходимо сначала записать адрес в EEADR-регистр и
Записи в память EEPROM
необходимо сначала записать адрес в EEADR-регистр и
Рекомендуется после выполнения операции записи в EEPROM память данных произвести контрольное
Рекомендуется после выполнения операции записи в EEPROM память данных произвести контрольное
Специальные функции
В PIC16F8X реализованы следующие специальные функции:
сброс;
сторожевой таймер (WDT);
режим пониженного
Специальные функции
В PIC16F8X реализованы следующие специальные функции:
сброс;
сторожевой таймер (WDT);
режим пониженного
Для реализации сброса по включению питания в МК подгруппы PIC16F8X предусмотрен
Для реализации сброса по включению питания в МК подгруппы PIC16F8X предусмотрен
Микроконтроллеры подгруппы PIC16F8X имеют встроенный сторожевой таймер WDT. Для большей надежности он
Микроконтроллеры подгруппы PIC16F8X имеют встроенный сторожевой таймер WDT. Для большей надежности он
Команды "CLRWDT" и "SLEEP" обнуляют WDT и пределитель, если он подключен
Команды "CLRWDT" и "SLEEP" обнуляют WDT и пределитель, если он подключен
Режим пониженного энергопотребления SLEEP предназначен для обеспечения очень малого тока потребления
Режим пониженного энергопотребления SLEEP предназначен для обеспечения очень малого тока потребления
Программный код, который записан в кристалл, может быть защищен от считывания
Программный код, который записан в кристалл, может быть защищен от считывания
Для выбора различных режимов работы используются биты конфигурации
которые хранятся в памяти
Для выбора различных режимов работы используются биты конфигурации
которые хранятся в памяти
Четыре слова памяти, расположенные по адресам 2000h-2003h, предназначены для хранения идентификационного
8-разрядные микроконтроллеры AVR
фирмы Atmel.
Лекция 15
3
фирмы Atmel.
Лекция 15
3
В рамках единой базовой архитектуры микроконтроллеры AVR
подразделяются на три семейства:
• Classic
В рамках единой базовой архитектуры микроконтроллеры AVR
подразделяются на три семейства:
• Classic
Для семейства "classic" - это модемы различных типов, современные зарядные
Для семейства "classic" - это модемы различных типов, современные зарядные

Микроконтроллер AVR содержит: быстрый RISC-процессор, два типа энергонезависимой памяти (Flash-память программ
Микроконтроллер AVR содержит: быстрый RISC-процессор, два типа энергонезависимой памяти (Flash-память программ
В состав микроконтроллера входят:
■ генератор тактового сигнала (GCK);
■ процессор (CPU);
■ постоянное запоминающее устройство для
В состав микроконтроллера входят:
■ генератор тактового сигнала (GCK);
■ процессор (CPU);
■ постоянное запоминающее устройство для
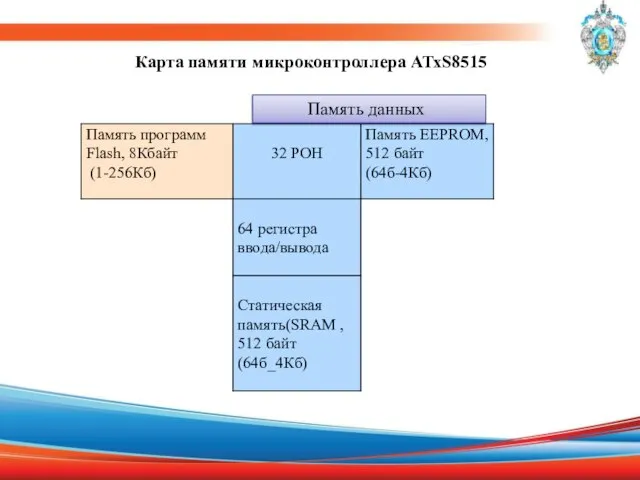
Карта памяти микроконтроллера АТхS8515
Память данных
Карта памяти микроконтроллера АТхS8515
Память данных
В состав процессора (CPU) входят:
■ счетчик команд (PC);
■ арифметико-логическое устройство (ALU);
■ блок регистров общего
В состав процессора (CPU) входят:
■ счетчик команд (PC);
■ арифметико-логическое устройство (ALU);
■ блок регистров общего
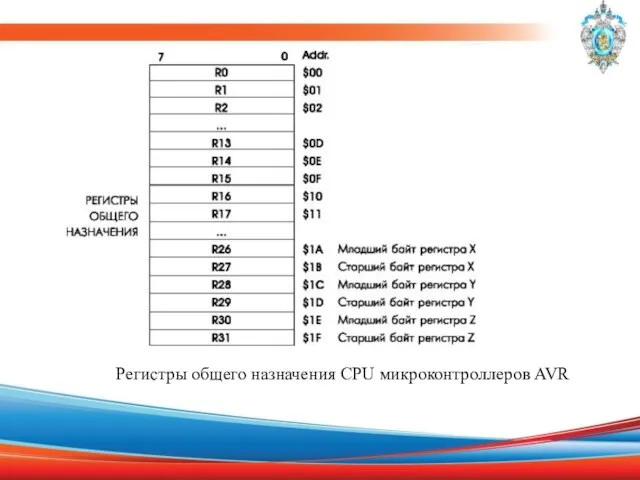
Регистры общего назначения CPU микроконтроллеров AVR
Регистры общего назначения CPU микроконтроллеров AVR
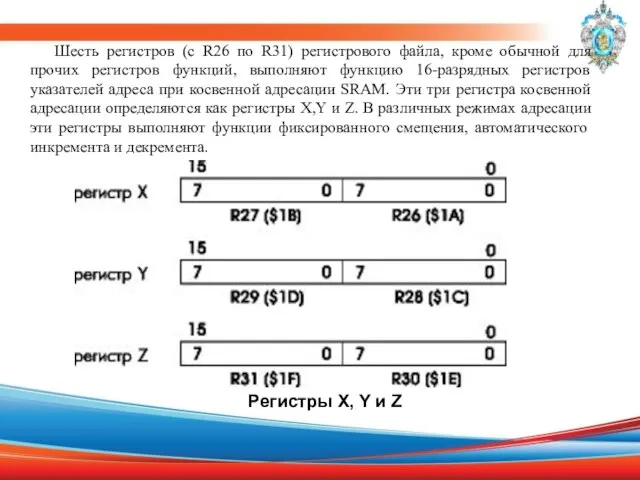
Шесть регистров (с R26 по R31) регистрового файла, кроме обычной для
Шесть регистров (с R26 по R31) регистрового файла, кроме обычной для

Конфигурация памяти
Первые 96 адресов занимают регистровый файл и пространство памяти
Конфигурация памяти
Первые 96 адресов занимают регистровый файл и пространство памяти
8-разрядные микроконтроллеры AVR
фирмы Atmel (продолжение)
Лекция 16
3
фирмы Atmel (продолжение)
Лекция 16
3
Режимы адресации памяти программ и данных
При обращении к Flash памяти программ
Режимы адресации памяти программ и данных
При обращении к Flash памяти программ

Непосредственная адресация данных
16-разрядный адрес данных содержится в 16 младших разрядах 32-разрядной
Непосредственная адресация данных
16-разрядный адрес данных содержится в 16 младших разрядах 32-разрядной

Непосредственная адресация, два регистра Rd и Rr
Операнды содержатся в регистрах r
Непосредственная адресация, два регистра Rd и Rr
Операнды содержатся в регистрах r

Косвенная адресация данных со смещением
.Косвенная адресация данных со смещением
Адрес операнда вычисляется
Косвенная адресация данных со смещением
.Косвенная адресация данных со смещением
Адрес операнда вычисляется

Косвенная адресация данных с преддекрементом
Перед выполнением операции регистр X, Y или
Косвенная адресация данных с преддекрементом
Перед выполнением операции регистр X, Y или

Адресация константы с использованием команд LPM и ELPM
Непосредственная адресация памяти программ,
Адресация константы с использованием команд LPM и ELPM
Непосредственная адресация памяти программ,

Косвенная адресация памяти программ, команды IJMP и ICALL
Выполнение программы продолжается с
Косвенная адресация памяти программ, команды IJMP и ICALL
Выполнение программы продолжается с
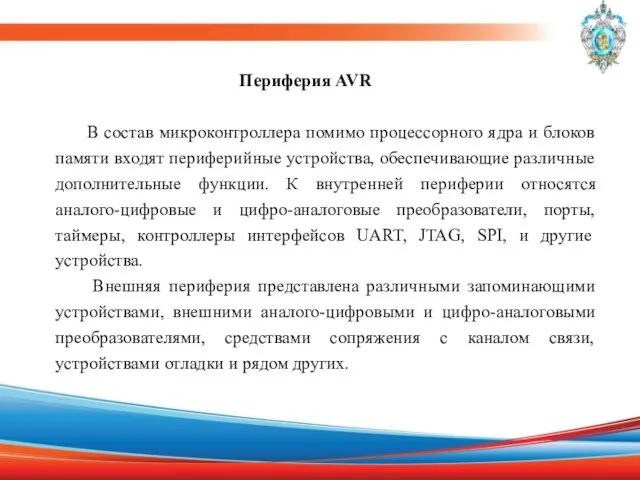
В состав микроконтроллера помимо процессорного ядра и блоков памяти входят периферийные
В состав микроконтроллера помимо процессорного ядра и блоков памяти входят периферийные
С каждым портом связаны три регистра ввода-вывода: регистр DDRx направления передачи
С каждым портом связаны три регистра ввода-вывода: регистр DDRx направления передачи
Прерывания (INTERRUPTS)
Все микроконтроллеры AVR имеют многоуровневую систему прерываний. Область векторов прерываний
Прерывания (INTERRUPTS)
Все микроконтроллеры AVR имеют многоуровневую систему прерываний. Область векторов прерываний
Таймеры/счетчики (TIMER/COUNTERS)
Микроконтроллеры AVR имеют в своем составе от 1 до 4
Таймеры/счетчики (TIMER/COUNTERS)
Микроконтроллеры AVR имеют в своем составе от 1 до 4
Аналоговый компаратор (AC)
Сравнивает напряжения на двух выводах (пинах) микроконтроллера. Результатом сравнения
Аналоговый компаратор (AC)
Сравнивает напряжения на двух выводах (пинах) микроконтроллера. Результатом сравнения
Тактовый генератор
Тактовый генератор вырабатывает импульсы для синхронизации работы всех узлов микроконтроллера.
Тактовый генератор
Тактовый генератор вырабатывает импульсы для синхронизации работы всех узлов микроконтроллера.
Питание
AVR функционируют при напряжениях питания от 1,8 до 6,0 Вольт. Ток
Питание
AVR функционируют при напряжениях питания от 1,8 до 6,0 Вольт. Ток
Режим холостого хода (IDLE).
Прекращает работу только процессор и фиксируется содержимое памяти
Режим холостого хода (IDLE).
Прекращает работу только процессор и фиксируется содержимое памяти
Основные этапы разработки микропроцессорной системы на основе микроконтроллеров
Лекция 17
3
Лекция 17
3
МПС на основе МК используются чаще всего в качестве встроенных
МПС на основе МК используются чаще всего в качестве встроенных
Сложившаяся к настоящему времени методология проектирования контроллеров
Сложившаяся к настоящему времени методология проектирования контроллеров
В техническом задании формулируются требования к контроллеру с точки зрения
В техническом задании формулируются требования к контроллеру с точки зрения
При выборе типа МК учитываются следующие основные характеристики:
- разрядность;
-
При выборе типа МК учитываются следующие основные характеристики:
- разрядность;
-
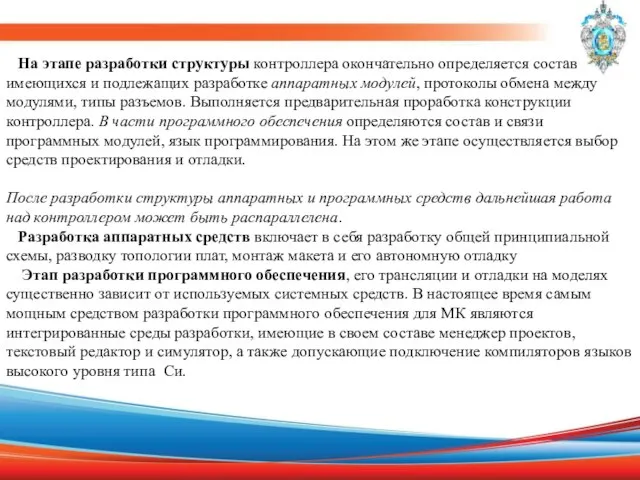
На этапе разработки структуры контроллера окончательно определяется состав имеющихся и
На этапе разработки структуры контроллера окончательно определяется состав имеющихся и
 Коммуникации по рейтингу подрядных организаций
Коммуникации по рейтингу подрядных организаций Певец русской природы
Певец русской природы Презентация
Презентация Радиосистема передачи церебральных сигналов
Радиосистема передачи церебральных сигналов Единицы измерения информации
Единицы измерения информации Problem statement. Exploration of the 5/01 Vario vacuum casting machine and promotional demo for one application
Problem statement. Exploration of the 5/01 Vario vacuum casting machine and promotional demo for one application Григорьева Анна СВ-42 (гнойный бурсит холки у лошади)
Григорьева Анна СВ-42 (гнойный бурсит холки у лошади) 20150929_urok_1_dom_bez_sten_8_kl
20150929_urok_1_dom_bez_sten_8_kl 2 (1)
2 (1) Реконструкция игры властилин замка
Реконструкция игры властилин замка ТЭК нефть
ТЭК нефть Евгений Иванович НОСОВ
Евгений Иванович НОСОВ 20141201_prezentatsiya_szh
20141201_prezentatsiya_szh 6.Возрастная периодизаци
6.Возрастная периодизаци Презентация без названия
Презентация без названия Диагностика строительных конструкций
Диагностика строительных конструкций Моя профессия – моя дорога в будущее
Моя профессия – моя дорога в будущее 20170109_viktorina_po_pdd
20170109_viktorina_po_pdd 20150310_god_rossiyskoy_istorii
20150310_god_rossiyskoy_istorii Что и зачем партнеру знать про пиратство
Что и зачем партнеру знать про пиратство PPTX Presentation (2)
PPTX Presentation (2) Агитация на службу
Агитация на службу ПАЎТАРЭННЕ ЗА 2 КЛ. ГУКІ І ЛІТАРЫ
ПАЎТАРЭННЕ ЗА 2 КЛ. ГУКІ І ЛІТАРЫ Порядок действий при вынужденной остановке поезда
Порядок действий при вынужденной остановке поезда Линьков Артемий 27 группа парктическая 12
Линьков Артемий 27 группа парктическая 12 Первое послание к Коринфянам
Первое послание к Коринфянам 20170107_umnozhenie_i_delenie_polozhitelnyh_i_otritsatelnyh_chisel._6_klass
20170107_umnozhenie_i_delenie_polozhitelnyh_i_otritsatelnyh_chisel._6_klass ВНД 2021
ВНД 2021