Разработка метода и программного модуля управления шестизвенным манипулятором на основе геометрического подхода
- Разработка метода и программного модуля управления шестизвенным манипулятором на основе геометрического подхода

Содержание
- 2. Цель и задачи Цель работы: создание программного модуля решения прямой и обратной задачи кинематики шестизвенного манипулятора.
- 3. Композиты Примеры композитов в авиастроении Композитный материал (КМ), композит — многокомпонентные материалы, состоящие, как правило, из
- 4. Роботехническая система
- 5. Задачи кинематики Прямая задача — это вычисление положения (X, Y, Z) рабочего органа манипулятора по его
- 6. Вариативность манипуляторов
- 8. Скачать презентацию
Цель и задачи
Цель работы: создание программного модуля решения прямой и обратной
Цель и задачи
Цель работы: создание программного модуля решения прямой и обратной
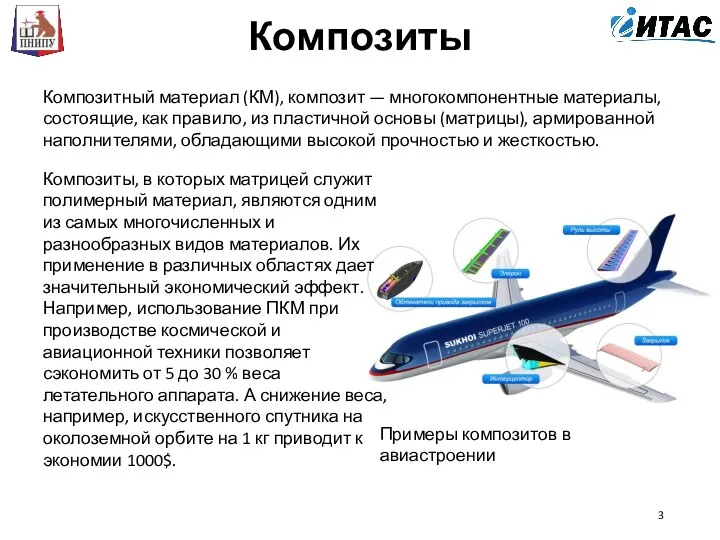
Композиты
Примеры композитов в авиастроении
Композитный материал (КМ), композит — многокомпонентные материалы, состоящие,
Композиты
Примеры композитов в авиастроении
Композитный материал (КМ), композит — многокомпонентные материалы, состоящие,

Роботехническая
система
Роботехническая
система

Задачи кинематики
Прямая задача — это вычисление положения (X, Y, Z) рабочего
Задачи кинематики
Прямая задача — это вычисление положения (X, Y, Z) рабочего

Вариативность
манипуляторов
Вариативность
манипуляторов
 Регулировка молотильного аппарата
Регулировка молотильного аппарата Международная транспортировка нефти и организация перевозок российской арктической нефти
Международная транспортировка нефти и организация перевозок российской арктической нефти Wigilia bożego narodzeniaWigilia Bożego Narodzenia
Wigilia bożego narodzeniaWigilia Bożego Narodzenia Усолинская сельская библиотека Солдаты Победы
Усолинская сельская библиотека Солдаты Победы Наука. Библиотека. Музеи
Наука. Библиотека. Музеи Эксплуатируемая зеленая кровля жилых зданий повышенной этажности. Часть 1
Эксплуатируемая зеленая кровля жилых зданий повышенной этажности. Часть 1 Булат Солтангәрәев исемендәге республика премияһы
Булат Солтангәрәев исемендәге республика премияһы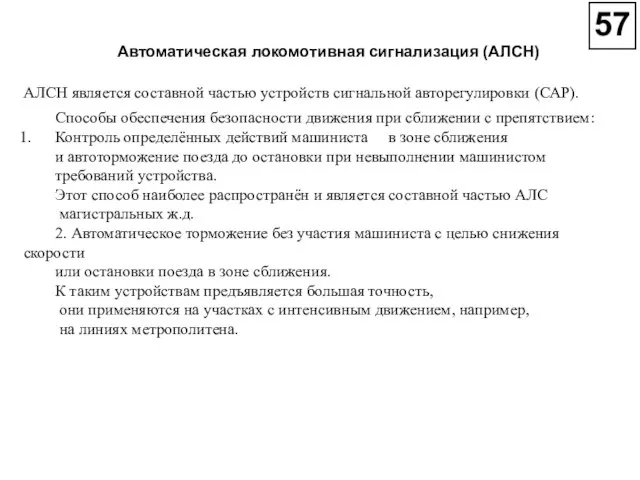 Автоматическая локомотивная сигнализация
Автоматическая локомотивная сигнализация Презентация2 корзина с фруктами
Презентация2 корзина с фруктами Святой апостол Андрей Первозванный
Святой апостол Андрей Первозванный Технологический процесс ремонта водяного насоса двигателя КаМаЗ - 740
Технологический процесс ремонта водяного насоса двигателя КаМаЗ - 740 Математика Деление на двузначные числа. Решение задач и уравнений
Математика Деление на двузначные числа. Решение задач и уравнений 20131218_prezentatsiya1_38
20131218_prezentatsiya1_38 20140310_turgenev
20140310_turgenev Презентация Спортивная семья Бачериковых
Презентация Спортивная семья Бачериковых Подарок от любимой
Подарок от любимой Огни Уфы. Экскурсия
Огни Уфы. Экскурсия Презентация Международный ЭДО
Презентация Международный ЭДО Лесная, деревообрабаты-вающая, целлюлозно-бумажная промышленности
Лесная, деревообрабаты-вающая, целлюлозно-бумажная промышленности 20170104_chast_2
20170104_chast_2 American holidays
American holidays Вычислительные комплексы в расчетах строительных конструкций
Вычислительные комплексы в расчетах строительных конструкций 20140818_chto_takoe_khvoink_1i
20140818_chto_takoe_khvoink_1i 20180904_prezentatsiya2
20180904_prezentatsiya2 Основы вибрационной диагностики
Основы вибрационной диагностики Цех Высоковольтных электрических сетей ГУП ПЭО Байконурэнерго
Цех Высоковольтных электрических сетей ГУП ПЭО Байконурэнерго Металлические конструкции
Металлические конструкции Основы светской этики
Основы светской этики