- Разработка трехстепенного лабораторного манипулятора с механическим захватом

Содержание
- 2. Цель и задачи Цель: Разработка трехстепенного лабораторного манипулятора с механическим захватом для исследования методов управления и
- 3. Кинематическая схема манипулятора Кинематическая схема манипулятора Различные положения Манипулятор Fanuc M-410iB
- 4. Проектирование схвата манипулятора Чертёж 3D модель схвата Схват при различных положениях
- 5. Проектирование деталей манипулятора Модели деталей манипулятора
- 6. Компьютерная динамическая модель манипулятора Входные и выходные данные в модели Демонстрация работы компьютерной модели
- 7. Динамические характеристики манипулятора Результат вычисления компьютерной модели для 1-го звена манипулятора
- 8. Определение рабочей зоны манипулятора
- 9. Характеристики манипулятора Повторяемость: 2мм Радиус действия: 570мм Диапазон перемещения: 180 град. Грузоподъёмность: 50 – 100 грамм
- 10. Аппаратная реализация системы управления на основе Arduino
- 11. Программа управления манипулятором Упрощённая структура программы управления манипулятором
- 13. Скачать презентацию
Цель и задачи
Цель:
Разработка трехстепенного лабораторного манипулятора с механическим захватом для
Цель и задачи
Цель:
Разработка трехстепенного лабораторного манипулятора с механическим захватом для
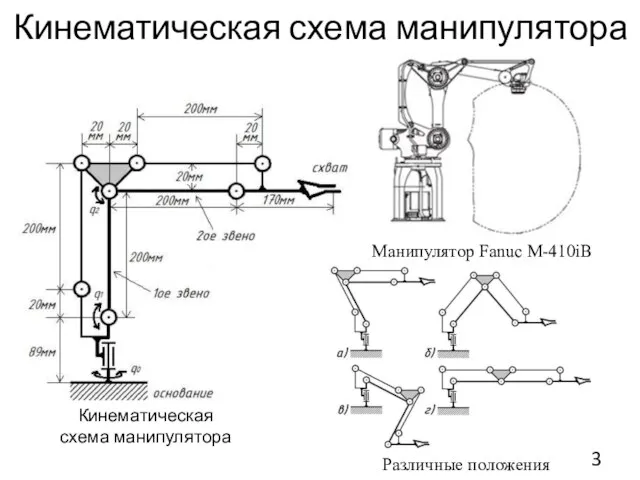
Кинематическая схема манипулятора
Кинематическая схема манипулятора
Различные положения
Манипулятор Fanuc M-410iB
Кинематическая схема манипулятора
Кинематическая схема манипулятора
Различные положения
Манипулятор Fanuc M-410iB

Проектирование схвата манипулятора
Чертёж
3D модель схвата
Схват при различных положениях
Проектирование схвата манипулятора
Чертёж
3D модель схвата
Схват при различных положениях
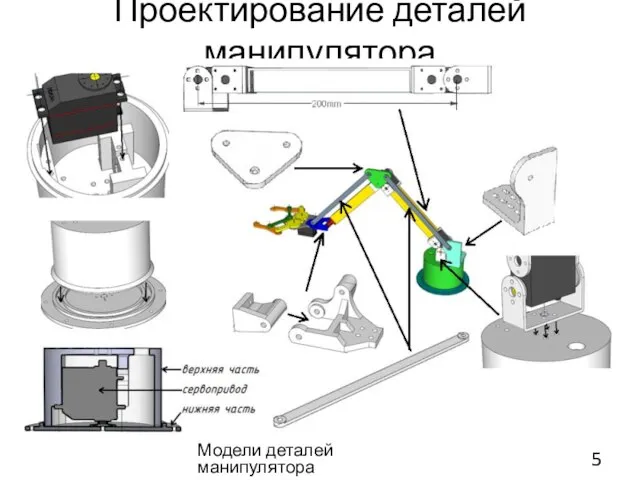
Проектирование деталей манипулятора
Модели деталей манипулятора
Проектирование деталей манипулятора
Модели деталей манипулятора
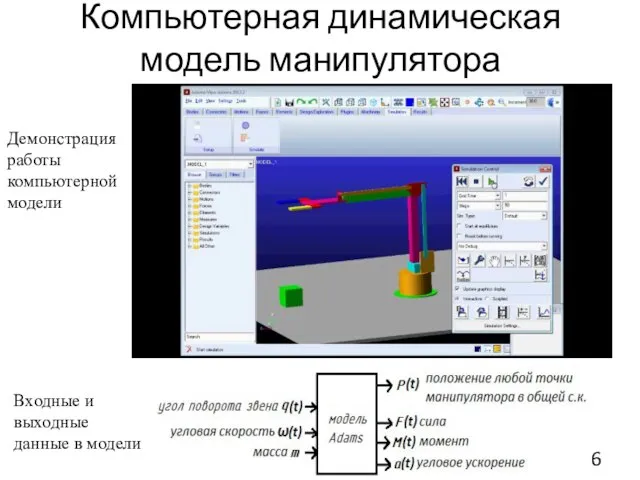
Компьютерная динамическая модель манипулятора
Входные и выходные данные в модели
Демонстрация работы компьютерной
Компьютерная динамическая модель манипулятора
Входные и выходные данные в модели
Демонстрация работы компьютерной
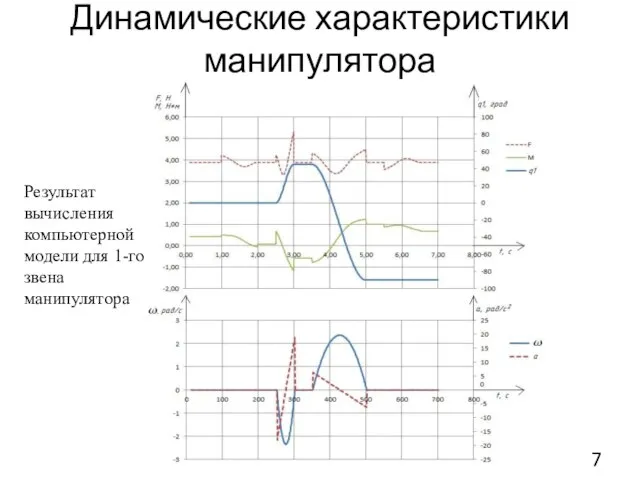
Динамические характеристики манипулятора
Результат вычисления компьютерной модели для 1-го звена манипулятора
Динамические характеристики манипулятора
Результат вычисления компьютерной модели для 1-го звена манипулятора
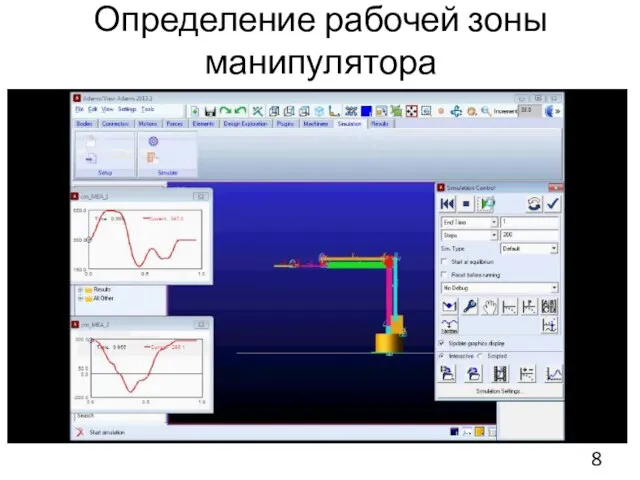
Определение рабочей зоны манипулятора
Определение рабочей зоны манипулятора
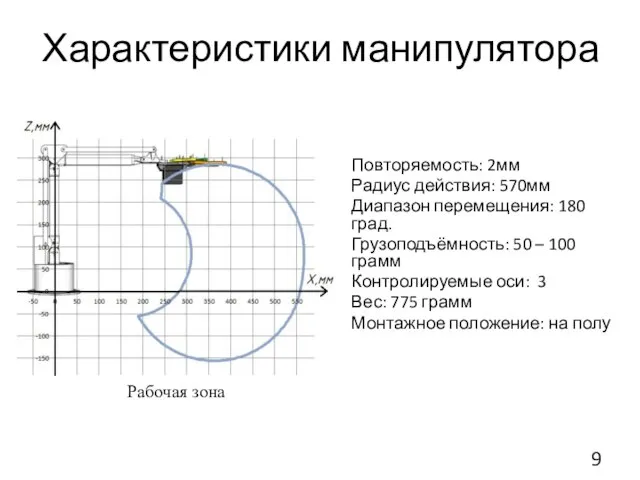
Характеристики манипулятора
Повторяемость: 2мм
Радиус действия: 570мм
Диапазон перемещения: 180 град.
Грузоподъёмность: 50 – 100
Характеристики манипулятора
Повторяемость: 2мм
Радиус действия: 570мм
Диапазон перемещения: 180 град.
Грузоподъёмность: 50 – 100
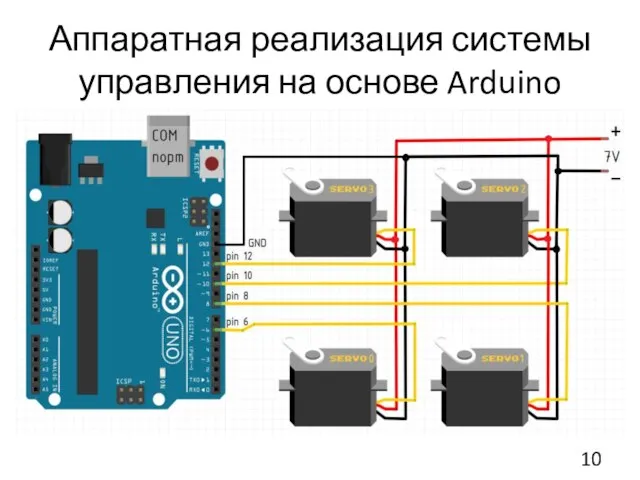
Аппаратная реализация системы управления на основе Arduino
Аппаратная реализация системы управления на основе Arduino
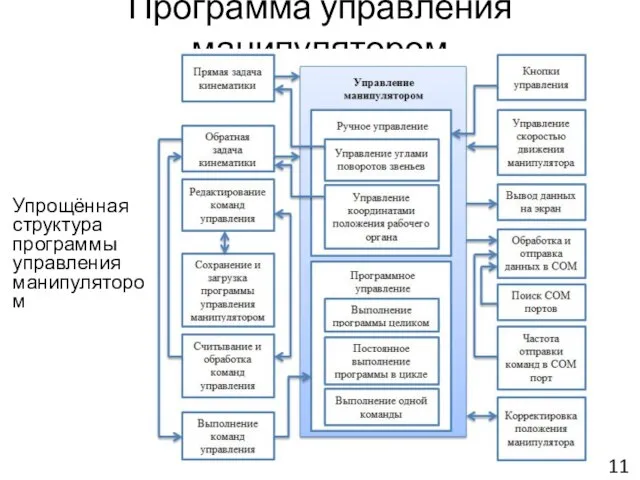
Программа управления манипулятором
Упрощённая структура программы управления манипулятором
Программа управления манипулятором
Упрощённая структура программы управления манипулятором
 Проект “дети войны”
Проект “дети войны” Рамзин Леонид Константинович (1887-1948)
Рамзин Леонид Константинович (1887-1948) Equinox
Equinox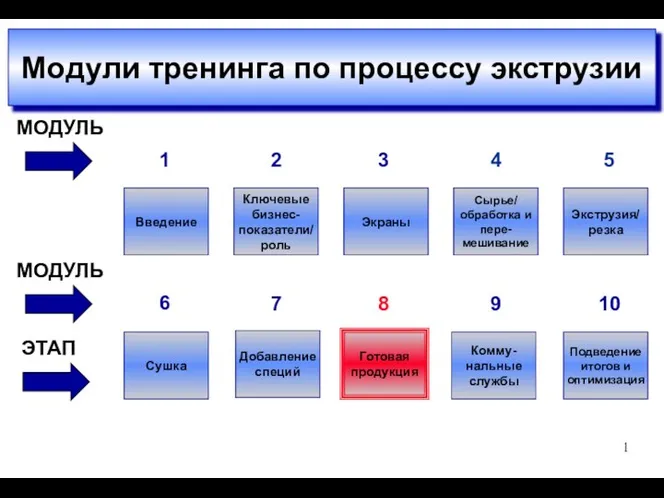 Модули тренинга по процессу экструзии
Модули тренинга по процессу экструзии Октябрь 2016
Октябрь 2016 КП СфераКонтакт v1
КП СфераКонтакт v1 Цемент. Производство цемента
Цемент. Производство цемента Плата расширения для конструирования роботов
Плата расширения для конструирования роботов 012_plosk_povtor
012_plosk_povtor Подарок князю
Подарок князю Тема урока Герои достойные уважения
Тема урока Герои достойные уважения Белоруско-китайский двухсекционный магистральный грузовой электровоз переменного тока серии БКГ-1
Белоруско-китайский двухсекционный магистральный грузовой электровоз переменного тока серии БКГ-1 Шины расширения. Шина PCI
Шины расширения. Шина PCI Нестиарская сельская администрация представляет
Нестиарская сельская администрация представляет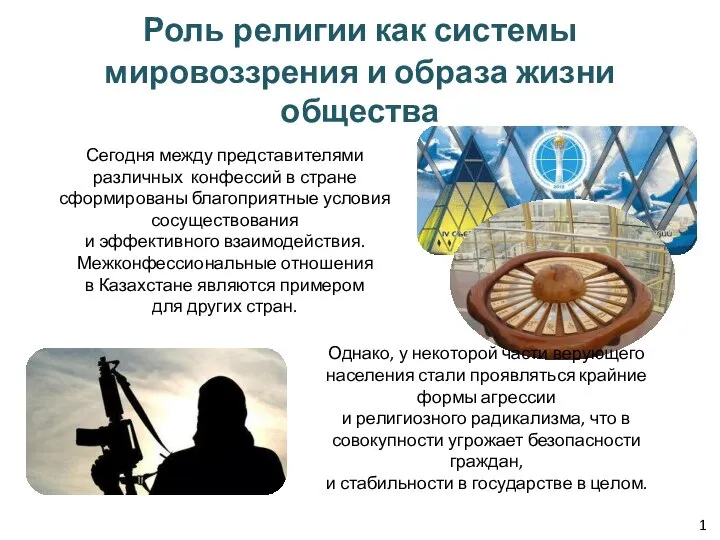 Роль религии как системы мировоззрения и образа жизни общества
Роль религии как системы мировоззрения и образа жизни общества slide
slide „Nie rusz, co nie twoje!”. Rzecz o siódmym przykazaniu
„Nie rusz, co nie twoje!”. Rzecz o siódmym przykazaniu phpbzdn5G_babochka
phpbzdn5G_babochka Наречия, противоположные и близкие по значению
Наречия, противоположные и близкие по значению ядовитые грибы
ядовитые грибы Денис
Денис Жанры симфонической музыки
Жанры симфонической музыки Нарезание наружной и внутренней резьбы подготовила
Нарезание наружной и внутренней резьбы подготовила Романюк Полина
Романюк Полина Система автоматического полива сада
Система автоматического полива сада 20151126_chast_2
20151126_chast_2 Бытовые электроинструменты
Бытовые электроинструменты Обработка информации, анализ информации
Обработка информации, анализ информации