- Робот манипулятор

Содержание
- 2. Проблематика проекта В 21 веке, технологический прогресс совершенствуется с каждым днём всё больше и больше. И
- 4. Существующие решения
- 5. Почему робот манипулятор лучше? Из прошлого слайда, можно понять, что робот манипулятор стационарный, лучше чем передвижной
- 6. Предлагаемое решение Я предлагаю сделать робот манипулятор, который в дальнейшем можно будет усовершенствовать для определённых видов
- 7. 220 В
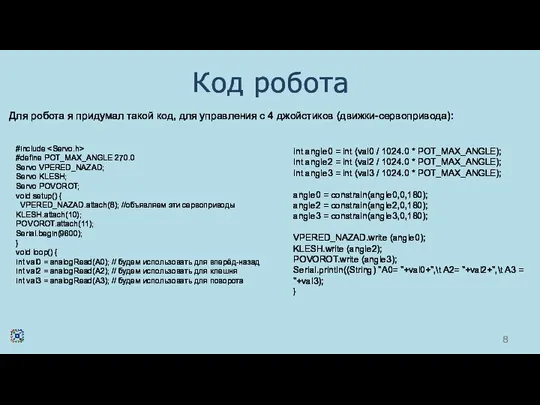
- 8. Код робота Для робота я придумал такой код, для управления с 4 джойстиков (движки-сервопривода): #include #define
- 9. Ход работы 1) Разработать чертёж. 2) Создать детали по чертежу. 3) Собрать детали и компоненты. 4)
- 10. Теоретическое обоснование Сервоприводы позволят поворачиваться роботу вокруг своей оси на 270 градусов, опора робота будет зафиксирована
- 11. Технические характеристики Угол поворота:270 Габариты: 6000x1500x1500(мм(с вытянутой стрелой)) 1500x1500x4000(мм(с сложенной стрелой) Грузоподъёмность: до 3 тонн Сервопривод:
- 12. Экономическое обоснование
- 13. Сэкономь самое важное в этой жизни… Здоровье и время, потрать их рядом с родными!
- 15. Скачать презентацию
Проблематика проекта
В 21 веке, технологический прогресс совершенствуется с каждым днём всё
Проблематика проекта
В 21 веке, технологический прогресс совершенствуется с каждым днём всё

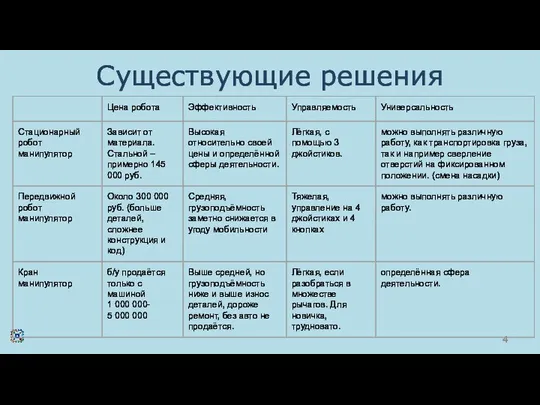
Существующие решения
Существующие решения
Почему робот манипулятор лучше?
Из прошлого слайда, можно понять, что робот манипулятор
Почему робот манипулятор лучше?
Из прошлого слайда, можно понять, что робот манипулятор

Предлагаемое решение
Я предлагаю сделать робот манипулятор, который в дальнейшем можно будет
Предлагаемое решение
Я предлагаю сделать робот манипулятор, который в дальнейшем можно будет
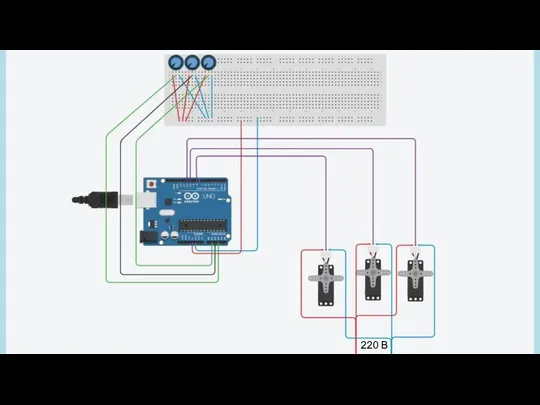
220 В
220 В
Код робота
Для робота я придумал такой код, для управления с 4
Код робота
Для робота я придумал такой код, для управления с 4

Ход работы
1) Разработать чертёж.
2) Создать детали по чертежу.
3) Собрать детали и
Ход работы
1) Разработать чертёж.
2) Создать детали по чертежу.
3) Собрать детали и
Теоретическое обоснование
Сервоприводы позволят поворачиваться роботу вокруг своей оси на 270 градусов,
опора
Теоретическое обоснование
Сервоприводы позволят поворачиваться роботу вокруг своей оси на 270 градусов,
опора
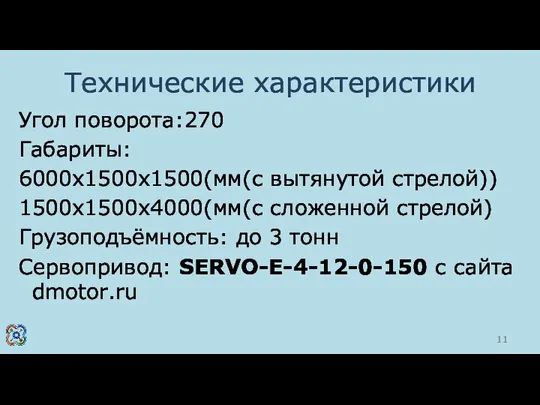
Технические характеристики
Угол поворота:270
Габариты:
6000x1500x1500(мм(с вытянутой стрелой))
1500x1500x4000(мм(с сложенной стрелой)
Грузоподъёмность: до 3 тонн
Сервопривод:
Технические характеристики
Угол поворота:270
Габариты:
6000x1500x1500(мм(с вытянутой стрелой))
1500x1500x4000(мм(с сложенной стрелой)
Грузоподъёмность: до 3 тонн
Сервопривод:
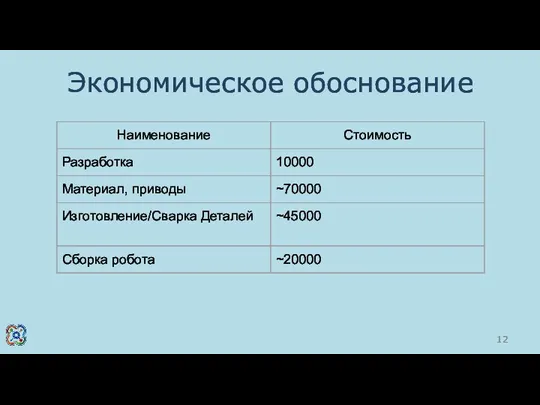
Экономическое обоснование
Экономическое обоснование

Сэкономь самое важное в этой жизни…
Здоровье и время, потрать их рядом
Сэкономь самое важное в этой жизни…
Здоровье и время, потрать их рядом
 Мебель
Мебель Техника безопасности при работе на токарном станке по дереву
Техника безопасности при работе на токарном станке по дереву Darba drošība un aizsardzība
Darba drošība un aizsardzība Символика православного храма
Символика православного храма Синтаксические синонимы
Синтаксические синонимы Подготовка к защите проекта
Подготовка к защите проекта Экологический аудит
Экологический аудит Функции семьи и их характеристика
Функции семьи и их характеристика Голодомор
Голодомор Огород из соломенных тюков
Огород из соломенных тюков Візуальний мерчандайзинг
Візуальний мерчандайзинг Школьная ежемесячная газета
Школьная ежемесячная газета Материалы для дистанционной поддержки учащихся по дополнительной программе
Материалы для дистанционной поддержки учащихся по дополнительной программе Утилизация мусора на территории аал Райков
Утилизация мусора на территории аал Райков В мире профессий
В мире профессий 20130707_obobshchenie_opyta_po_teme_ispolzovanie_ikt_na_urokah_nrk
20130707_obobshchenie_opyta_po_teme_ispolzovanie_ikt_na_urokah_nrk Технологии термической и химико-термической обработки сталей
Технологии термической и химико-термической обработки сталей Правила поведения в гостях
Правила поведения в гостях Вентильный электродвигатель
Вентильный электродвигатель Рекомендации по ремонту цифровых компактных и системных фотокамер SAMSUNG
Рекомендации по ремонту цифровых компактных и системных фотокамер SAMSUNG Подготовка и организация автоматизированного производства (ОПАП, тема 2)
Подготовка и организация автоматизированного производства (ОПАП, тема 2) Физиология ретикулярной формации. Мозжечок, базальные ядра
Физиология ретикулярной формации. Мозжечок, базальные ядра Молодёжный блок фонда мира
Молодёжный блок фонда мира 2 (1)
2 (1) Помощники на дороге
Помощники на дороге Отделочный этап: отделка изделия из тонколистового металла, проволоки, пластмассы
Отделочный этап: отделка изделия из тонколистового металла, проволоки, пластмассы Оформление клиник
Оформление клиник Factorii care influenteaza planificarea activitatilor de transport
Factorii care influenteaza planificarea activitatilor de transport