- Робототехника. Компоненты роботов

Содержание
- 2. Робототе́хника (от робот и техника) — прикладная наука, занимающаяся разработкой автоматизированных технических систем. Робототехника опирается на
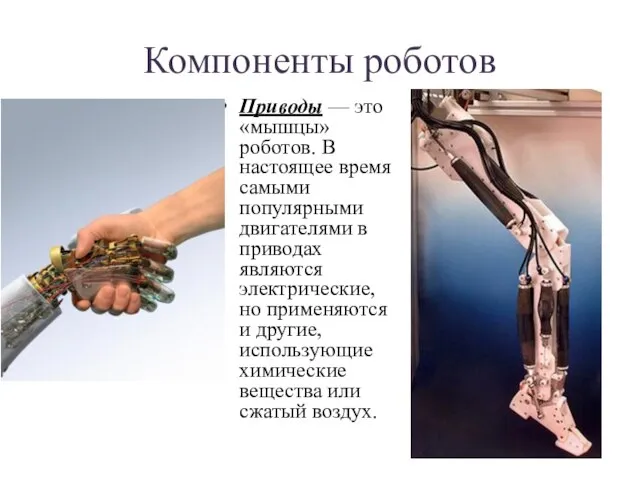
- 3. Компоненты роботов Приводы — это «мышцы» роботов. В настоящее время самыми популярными двигателями в приводах являются
- 4. Двигатели постоянного тока: В настоящий момент большинство роботов используютэлектродвигатели, которые могут быть нескольких видов. Шаговые электродвигатели:
- 5. Способы перемещения Колёсные и гусеничные роботы Наиболее распространёнными являются четырёхколёсные и гусеничные роботы. Также создаются роботы,
- 6. Шагающие роботы Перемещение робота с использованием «ног» представляет собой сложную задачу динамики. Уже создано некоторое количество
- 7. Летающие роботы. Большинство современных самолётов являются летающими роботами управляемыми пилотами. Автопилот способен контролировать полёт на всех
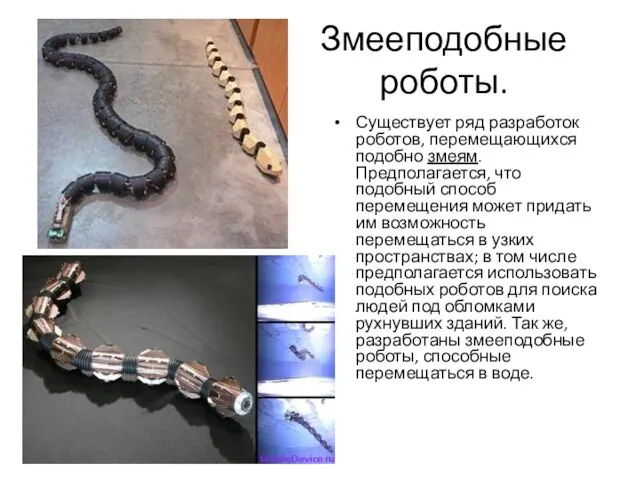
- 8. Змееподобные роботы. Существует ряд разработок роботов, перемещающихся подобно змеям. Предполагается, что подобный способ перемещения может придать
- 9. Роботы, перемещающиеся по вертикальным поверхностям. При проектировании подобных роботов используются различные подходы. Первый подход — проектирование
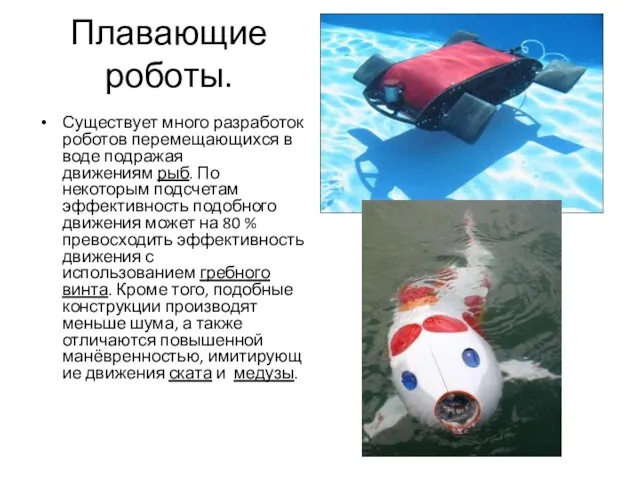
- 10. Плавающие роботы. Существует много разработок роботов перемещающихся в воде подражая движениям рыб. По некоторым подсчетам эффективность
- 11. Типы роботов: Андроид это человекоподобные роботы. Часто, для увеличения сходства с человеком в конструкцию андроидов добавляют
- 12. Боевой робот автоматическое устройство, заменяющее человека в боевых ситуациях для сохранения человеческой жизни или для работы
- 13. Персональный робот тип роботов, которые в отличие от промышленных роботов будут компактны, недороги и просты в
- 14. Промышленный робот применяется для перемещения объектов в пространстве и для выполнения различных производственных процессов.
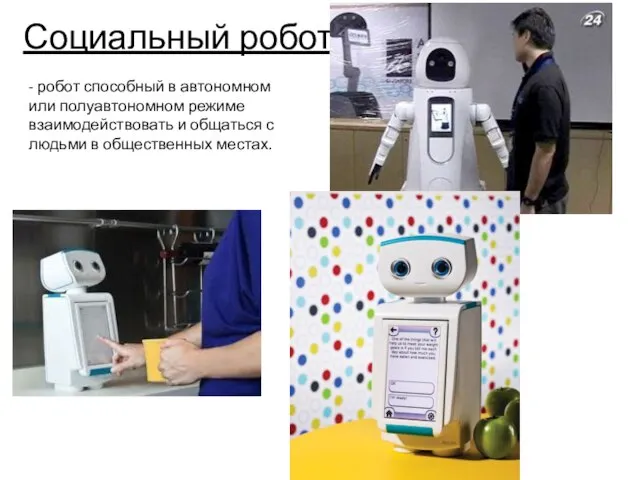
- 15. Социальный робот - робот способный в автономном или полуавтономном режиме взаимодействовать и общаться с людьми в
- 16. Шаробот использующий для передвижения единственное сферическое колесо (т.е. шар), и постоянно самобалансирующий на нём как в
- 17. Системы управления По типу управления робототехнические системы подразделяются на: Биотехнические: командные (кнопочное и рычажное управление отдельными
- 19. Скачать презентацию

Робототе́хника (от робот и техника) — прикладная наука, занимающаяся разработкой автоматизированных технических систем.
Робототехника опирается на такие дисциплины
Робототе́хника (от робот и техника) — прикладная наука, занимающаяся разработкой автоматизированных технических систем.
Робототехника опирается на такие дисциплины
Компоненты роботов
Приводы — это «мышцы» роботов. В настоящее время самыми популярными двигателями
Компоненты роботов
Приводы — это «мышцы» роботов. В настоящее время самыми популярными двигателями

Двигатели постоянного тока: В настоящий момент большинство роботов используютэлектродвигатели, которые могут быть
Двигатели постоянного тока: В настоящий момент большинство роботов используютэлектродвигатели, которые могут быть

Способы перемещения
Колёсные и гусеничные роботы
Наиболее распространёнными являются четырёхколёсные и гусеничные роботы. Также создаются
Способы перемещения
Колёсные и гусеничные роботы
Наиболее распространёнными являются четырёхколёсные и гусеничные роботы. Также создаются

Шагающие роботы
Перемещение робота с использованием «ног» представляет собой сложную задачу динамики.
Шагающие роботы
Перемещение робота с использованием «ног» представляет собой сложную задачу динамики.

Летающие роботы.
Большинство современных самолётов являются летающими роботами управляемыми пилотами. Автопилот способен контролировать полёт на всех
Летающие роботы.
Большинство современных самолётов являются летающими роботами управляемыми пилотами. Автопилот способен контролировать полёт на всех
Змееподобные роботы.
Существует ряд разработок роботов, перемещающихся подобно змеям. Предполагается, что подобный
Змееподобные роботы.
Существует ряд разработок роботов, перемещающихся подобно змеям. Предполагается, что подобный

Роботы, перемещающиеся по вертикальным поверхностям.
При проектировании подобных роботов используются различные
Роботы, перемещающиеся по вертикальным поверхностям.
При проектировании подобных роботов используются различные
Плавающие роботы.
Существует много разработок роботов перемещающихся в воде подражая движениям рыб.
Плавающие роботы.
Существует много разработок роботов перемещающихся в воде подражая движениям рыб.

Типы роботов:
Андроид это человекоподобные роботы. Часто, для увеличения сходства с человеком
Типы роботов:
Андроид это человекоподобные роботы. Часто, для увеличения сходства с человеком

Боевой робот
автоматическое устройство, заменяющее человека в боевых ситуациях для сохранения человеческой
Боевой робот
автоматическое устройство, заменяющее человека в боевых ситуациях для сохранения человеческой

Персональный робот
тип роботов, которые в отличие от промышленных роботов будут компактны, недороги и
Персональный робот
тип роботов, которые в отличие от промышленных роботов будут компактны, недороги и

Промышленный робот
применяется для перемещения объектов в пространстве и для выполнения различных
Промышленный робот
применяется для перемещения объектов в пространстве и для выполнения различных
Социальный робот
- робот способный в автономном или полуавтономном режиме взаимодействовать и
Социальный робот
- робот способный в автономном или полуавтономном режиме взаимодействовать и

Шаробот
использующий для передвижения единственное сферическое колесо (т.е. шар), и постоянно самобалансирующий
Шаробот
использующий для передвижения единственное сферическое колесо (т.е. шар), и постоянно самобалансирующий

Системы управления
По типу управления робототехнические системы подразделяются на:
Биотехнические:
командные (кнопочное и рычажное
Системы управления
По типу управления робототехнические системы подразделяются на:
Биотехнические:
командные (кнопочное и рычажное
 Pensaer Staatliche Universität Multidisziplinärte College
Pensaer Staatliche Universität Multidisziplinärte College 20120125_yushka
20120125_yushka Строительные материалы. Обзор. Тенденции развития
Строительные материалы. Обзор. Тенденции развития К.Я.З
К.Я.З Инструкция к оформлению сайта
Инструкция к оформлению сайта презентация Д.Родари
презентация Д.Родари Режущий инструмент
Режущий инструмент Výrobní technologie (2VT) Přednáška
Výrobní technologie (2VT) Přednáška Водохранилища-охладители
Водохранилища-охладители 01_Biologia_kak_nauka_Rol_biologii_v_prakticheskoy_deyatelnosti_lyudey
01_Biologia_kak_nauka_Rol_biologii_v_prakticheskoy_deyatelnosti_lyudey 20131225_nenauchnoe_poznanieyusots.poznanie.10kl
20131225_nenauchnoe_poznanieyusots.poznanie.10kl Ремонт проезжей части улицы Свободы от ул. Советская до пер. Безымянный, пгт Вахруши
Ремонт проезжей части улицы Свободы от ул. Советская до пер. Безымянный, пгт Вахруши Общие требования к эксплуатации теплоустановок
Общие требования к эксплуатации теплоустановок Аэродромные топливозаправщики
Аэродромные топливозаправщики Наречия, противоположные и близкие по значению
Наречия, противоположные и близкие по значению System studiów: „stacjonarne I stopnia”
System studiów: „stacjonarne I stopnia” Письмо подруге
Письмо подруге Универсальные осциллографы
Универсальные осциллографы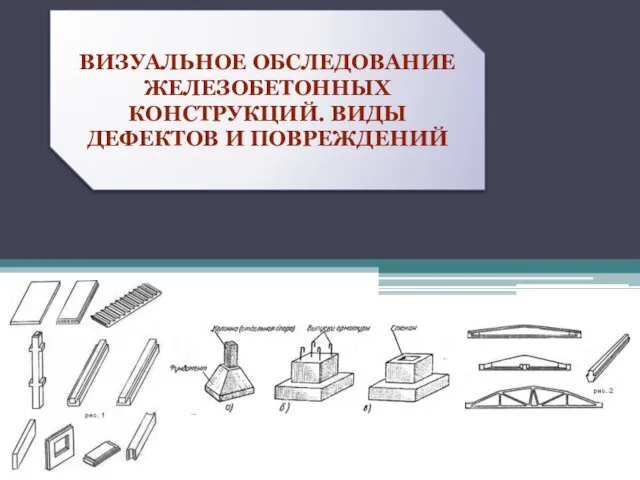 Визуальное обследование ЖБК, виды дефектов и повреждений
Визуальное обследование ЖБК, виды дефектов и повреждений Отчёт директората цифрового телевидения Alma TV за период с 20 по 26 Октября 2017г
Отчёт директората цифрового телевидения Alma TV за период с 20 по 26 Октября 2017г Отделка швейных изделий
Отделка швейных изделий Комитет по жилищно-коммунальному хозяйству администрации муниципального образования Город Саратов
Комитет по жилищно-коммунальному хозяйству администрации муниципального образования Город Саратов Алтын адам
Алтын адам Православный храм
Православный храм Выставка научных работ Васильевой Ю. В
Выставка научных работ Васильевой Ю. В Методы научного исследования
Методы научного исследования Схемо- и системотехника электронных средств
Схемо- и системотехника электронных средств Читая А. Даллеса через Г. Шильдермана: разработка модели для анализа пастырского действия в современной России
Читая А. Даллеса через Г. Шильдермана: разработка модели для анализа пастырского действия в современной России