- Системы подвижной связи. Классификация

Содержание
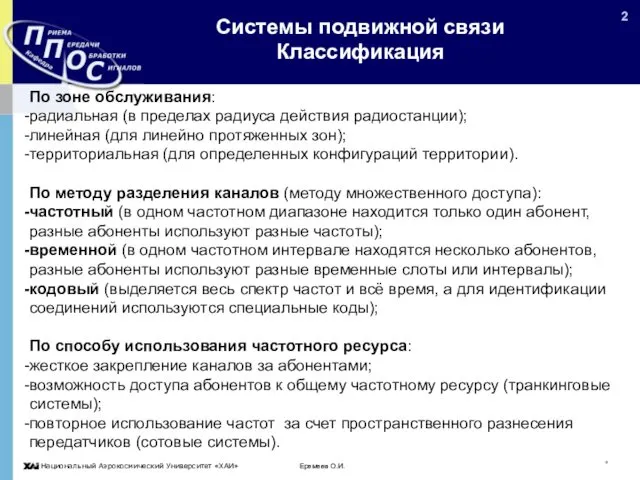
- 2. Еремеев О.И. * Системы подвижной связи Классификация По зоне обслуживания: радиальная (в пределах радиуса действия радиостанции);
- 3. Системы персонального радиовызова Еремеев О.И. *
- 4. Еремеев О.И. * Системы персонального радиовызова СПРВ – системы передачи данных, которые обеспечивают одностороннюю передачу информации
- 5. Еремеев О.И. * Структурная схема ТСПВ - терминал сети персонального вызова, принимает и анализирует входные данные
- 6. Еремеев О.И. * Структурная схема В состав сети передачи (СП) входят: БС - базовые станции, которые
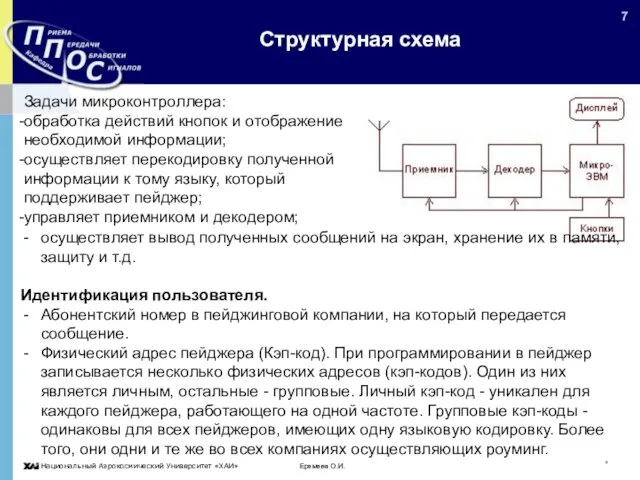
- 7. Еремеев О.И. * Структурная схема Задачи микроконтроллера: обработка действий кнопок и отображение необходимой информации; осуществляет перекодировку
- 8. Еремеев О.И. * Стандарты СПРВ POСSAG (от англ. Post Office Code Standardization Advisory Group). Наиболее известный
- 9. Профессиональные системы подвижной радиосвязи (транкинговые) Еремеев О.И. *
- 10. Еремеев О.И. * Профессиональные системы подвижной радиосвязи Первые системы подвижной радиосвязи создавались и развивались в интересах
- 11. Еремеев О.И. * Профессиональные системы подвижной радиосвязи Основные типы вызовов, поддерживаемые большинством стандартных протоколов: Индивидуальный вызов
- 12. Еремеев О.И. * Использование частот Для обычной связи между двумя радиостанциями (полудуплексный режим) достаточно одной частоты.
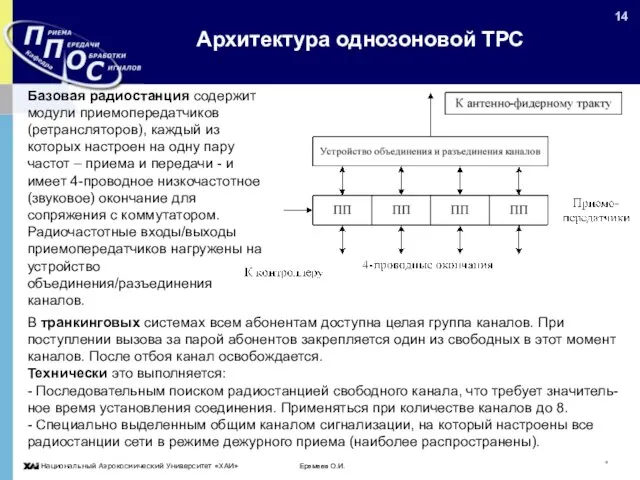
- 13. Еремеев О.И. * Архитектура однозоновой ТРС Базовая станция (БС) содержит модули приемопередатчиков, настроенных на одну пару
- 14. Еремеев О.И. * Архитектура однозоновой ТРС В транкинговых системах всем абонентам доступна целая группа каналов. При
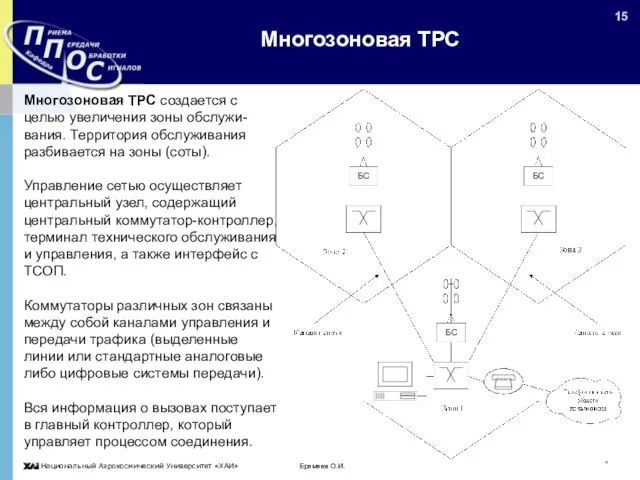
- 15. Еремеев О.И. * Многозоновая ТРС Многозоновая ТРС создается с целью увеличения зоны обслужи-вания. Территория обслуживания разбивается
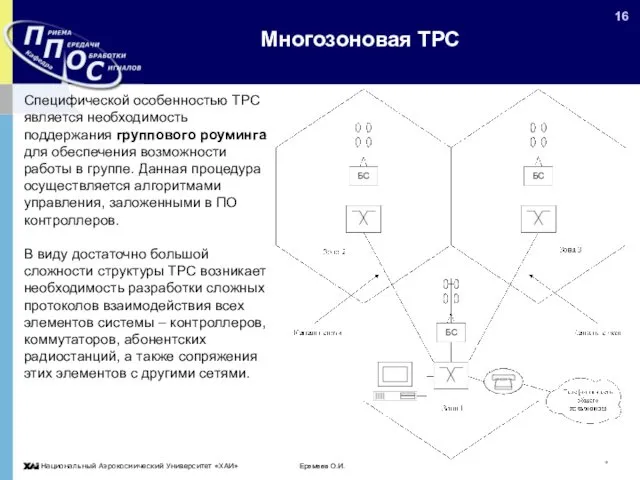
- 16. Еремеев О.И. * Многозоновая ТРС Специфической особенностью ТРС является необходимость поддержания группового роуминга для обеспечения возможности
- 17. Классификация ТРС Классификация ТРС может быть проведена по ряду признаков. В частности: по методу передачи речевой
- 19. Скачать презентацию
Еремеев О.И.
*
Системы подвижной связи
Классификация
По зоне обслуживания:
радиальная (в пределах радиуса действия радиостанции);
линейная
Еремеев О.И.
*
Системы подвижной связи
Классификация
По зоне обслуживания:
радиальная (в пределах радиуса действия радиостанции);
линейная
Системы персонального радиовызова
Еремеев О.И.
*
Системы персонального радиовызова
Еремеев О.И.
*
Еремеев О.И.
*
Системы персонального радиовызова
СПРВ – системы передачи данных, которые обеспечивают одностороннюю
Еремеев О.И.
*
Системы персонального радиовызова
СПРВ – системы передачи данных, которые обеспечивают одностороннюю

Еремеев О.И.
*
Структурная схема
ТСПВ - терминал сети персонального вызова, принимает и анализирует
Еремеев О.И.
*
Структурная схема
ТСПВ - терминал сети персонального вызова, принимает и анализирует

Еремеев О.И.
*
Структурная схема
В состав сети передачи (СП) входят:
БС - базовые станции,
Еремеев О.И.
*
Структурная схема
В состав сети передачи (СП) входят:
БС - базовые станции,
Еремеев О.И.
*
Структурная схема
Задачи микроконтроллера:
обработка действий кнопок и отображение необходимой информации;
осуществляет перекодировку
Еремеев О.И.
*
Структурная схема
Задачи микроконтроллера:
обработка действий кнопок и отображение необходимой информации;
осуществляет перекодировку
Еремеев О.И.
*
Стандарты СПРВ
POСSAG (от англ. Post Office Code Standardization Advisory Group).
Еремеев О.И.
*
Стандарты СПРВ
POСSAG (от англ. Post Office Code Standardization Advisory Group).
Профессиональные системы подвижной радиосвязи (транкинговые)
Еремеев О.И.
*
Профессиональные системы подвижной радиосвязи (транкинговые)
Еремеев О.И.
*
Еремеев О.И.
*
Профессиональные системы подвижной радиосвязи
Первые системы подвижной радиосвязи создавались и развивались
Еремеев О.И.
*
Профессиональные системы подвижной радиосвязи
Первые системы подвижной радиосвязи создавались и развивались
Еремеев О.И.
*
Профессиональные системы подвижной радиосвязи
Основные типы вызовов, поддерживаемые большинством стандартных протоколов:
Индивидуальный
Еремеев О.И.
*
Профессиональные системы подвижной радиосвязи
Основные типы вызовов, поддерживаемые большинством стандартных протоколов:
Индивидуальный

Еремеев О.И.
*
Использование частот
Для обычной связи между двумя радиостанциями (полудуплексный режим) достаточно
Еремеев О.И.
*
Использование частот
Для обычной связи между двумя радиостанциями (полудуплексный режим) достаточно

Еремеев О.И.
*
Архитектура однозоновой ТРС
Базовая станция (БС) содержит модули приемопередатчиков, настроенных на
Еремеев О.И.
*
Архитектура однозоновой ТРС
Базовая станция (БС) содержит модули приемопередатчиков, настроенных на
Еремеев О.И.
*
Архитектура однозоновой ТРС
В транкинговых системах всем абонентам доступна целая группа каналов.
Еремеев О.И.
*
Архитектура однозоновой ТРС
В транкинговых системах всем абонентам доступна целая группа каналов.
Еремеев О.И.
*
Многозоновая ТРС
Многозоновая ТРС создается с целью увеличения зоны обслужи-вания. Территория
Еремеев О.И.
*
Многозоновая ТРС
Многозоновая ТРС создается с целью увеличения зоны обслужи-вания. Территория
Еремеев О.И.
*
Многозоновая ТРС
Специфической особенностью ТРС является необходимость поддержания группового роуминга для
Еремеев О.И.
*
Многозоновая ТРС
Специфической особенностью ТРС является необходимость поддержания группового роуминга для
Классификация ТРС
Классификация ТРС может быть проведена по ряду признаков. В частности:
по
Классификация ТРС
Классификация ТРС может быть проведена по ряду признаков. В частности:
по
 Наши прадеды
Наши прадеды Грузовые лифты
Грузовые лифты 20170916_matematicheskiy_ekspress
20170916_matematicheskiy_ekspress Природа родного края
Природа родного края Английские интенсивы на тематической неделе Шпионские игры супергероев
Английские интенсивы на тематической неделе Шпионские игры супергероев 20121009_profilnoe
20121009_profilnoe Visual Rhetoric Reading & Writing Text
Visual Rhetoric Reading & Writing Text kiber
kiber Книги-юбиляры 2020
Книги-юбиляры 2020 Реализм и критический реализм
Реализм и критический реализм Схемы подключения внешних устройств к корректорам
Схемы подключения внешних устройств к корректорам Выдвижение проектной идеи как формирование образа будущего
Выдвижение проектной идеи как формирование образа будущего Фурнитура для пластиковых и деревянных окон Vorne
Фурнитура для пластиковых и деревянных окон Vorne Сорбонна
Сорбонна Презентация 7
Презентация 7 Три веселых дня с семьей на природе
Три веселых дня с семьей на природе Комплектные системы: решения для устройства конструкций подвесных потолков общественных зданий
Комплектные системы: решения для устройства конструкций подвесных потолков общественных зданий Дизайн-проект
Дизайн-проект Деревянная резная шкатулка Творческий проект
Деревянная резная шкатулка Творческий проект С днем Защитника Отечества
С днем Защитника Отечества 20131027_prezentatsiya_programmy_volna
20131027_prezentatsiya_programmy_volna ONY_MTC_Stroki_demo (1)
ONY_MTC_Stroki_demo (1) Инструменты финансового рынка для населения Организация прохождения практики: ПАО Сбербанк России
Инструменты финансового рынка для населения Организация прохождения практики: ПАО Сбербанк России Поздравление с 23 февраля
Поздравление с 23 февраля Грибанов Игорь, 253 группа
Грибанов Игорь, 253 группа Числа. Фонетика. Глаголы направления в китайском языке. (Урок 3)
Числа. Фонетика. Глаголы направления в китайском языке. (Урок 3) Интерьера дома в стиле неоклассика
Интерьера дома в стиле неоклассика Модернизация стенда управления асинхронным двигателем на базе частотного преобразователя TMDSHVMTRPFCKIT
Модернизация стенда управления асинхронным двигателем на базе частотного преобразователя TMDSHVMTRPFCKIT