- Современный автоматизированный электропривод горных машин

Содержание
- 2. АЭП КАРЬЕРНЫХ ЭКСКАВАТОРОВ Глава 1
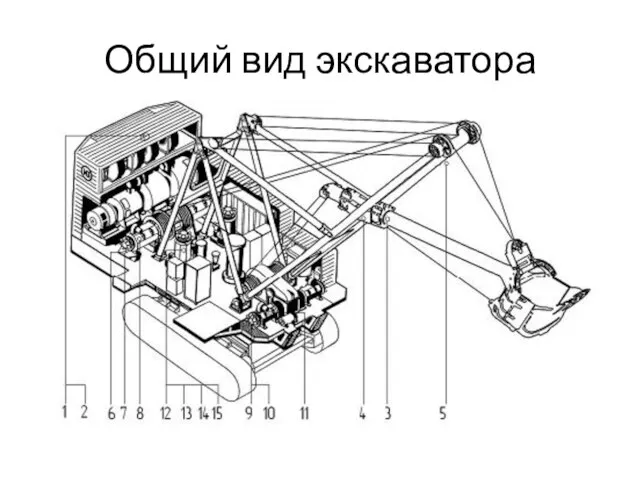
- 3. Общий вид экскаватора
- 4. Схема расположения оборудования Основное оборудование: 1 – главный преобразовательный агрегат; 2 – электродвигатели подъема; 3 –
- 5. Требования к АЭП подъема и напора 1. Диапазон регулирования скорости: 10 : 1. 2. Возможность удержания
- 6. Требования к АЭП поворота Диапазон регулирования скорости: 10 : 1. Ограничение динамического момента на уровне 2Mн
- 7. Структурная схема АЭП подъема и напора У – усилитель; УП – управляемый преобразователь; Д – двигатель;
- 8. Структурная схема АЭП подъема, напора и поворота АЭП постоянного тока с системой подчиненного регулирования У –
- 9. Структурная схема АЭП поворота АЭП постоянного тока с системой подчиненного регулирования У – усилитель; УП –
- 10. Структурная схема АЭП подъема, напора и поворота АЭП переменного тока с системой векторного управления
- 11. Структурная схема АЭП подъема, напора и поворота АЭП переменного тока с системой прямого управления моментом РС
- 12. К пояснению работы жесткой отрицательной обратной связи по току якоря в электроприводе постоянного тока ДПГ, ДПД
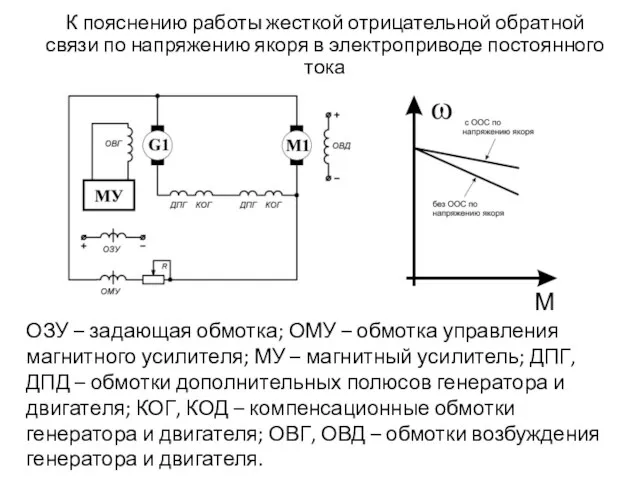
- 13. К пояснению работы жесткой отрицательной обратной связи по напряжению якоря в электроприводе постоянного тока ОЗУ –
- 14. Принципиальная электрическая схема платы регуляторов системы подчиненного регулирования АЭП подъема
- 15. Структурная схема системы подчиненного регулирования АЭП подъема
- 16. Однолинейная схема силовой части электроприводов переменного тока
- 17. Внешний вид экскаватора P&H 4100C BOSS
- 18. Схема расположения оборудования экскаватора P&H 4100C BOSS
- 19. Однолинейная схема силовой части электроприводов переменного тока экскаватора P&H 4100C BOSS
- 20. Электрооборудование экскаватора P&H 4100C BOSS Инверторная секция Шкаф контроллеров электроприводов Шкаф ПЛК
- 21. Кабина машиниста экскаватора На старом экскаваторе На современном экскаваторе
- 22. Особенности электродвигателей экскаватора P&H 4100 Характерная особенность – наличие датчика скорости и внешней (принудительной) вентиляции Изоляция
- 23. Особенности электродвигателей экскаватора P&H 4100 Характерная особенность ротора – наличие вентиляционных отверстий для лучшего охлаждения Статор
- 24. Высоковольтный коллекторно-щеточный узел Обозначение на ПЭС Внешний вид коллекторно- щеточного узла
- 25. АЭП ВЕНТИЛЯТОРОВ ГЛАВНОГО ПРОВЕТРИВАНИЯ ШАХТ Глава 2
- 26. Внешний вид вентиляторов главного проветривания шахт 1 – подводящий канал; 2 – переключатель потока; 3 –
- 27. Внешний вид вентиляторов главного проветривания шахт Вид сбоку
- 28. Типовые характеристики шахтного одноосевого вентилятора Характеристики при постоянной скорости и разных углах поворота лопаток Характеристики при
- 29. Структурная схема вентиляторно-калориферной установки ВГП – вентилятор главного проветривания; ШУЛ –шкаф управления локальный; ШУГ – шкаф
- 30. Структурная схема электропривода вентиляторно-калориферной установки В качестве преобразователей для разгона вентиляторов применяют также преобразователи частоты
- 31. Структурная схема ШУЛ Модуль ввода/вывода (Advantys STB) Аппаратура управления тормозом Аппаратура управления нагревателем Блок контакт контактора
- 32. Целесообразность внедрения регулируемого электропривода для вентиляторов главного проветривания Изменение длины и эквивалентного сечения выработки шахты (т.е.
- 33. Текущее состояние регулируемого электропривода ВГП Преобразователи частоты в основном применяются для разгона вентилятора до номинальной скорости.
- 34. Система управления ВГП СН4, CO – датчики метана и угарного газа; А1..4 – анемометры (датчики скорости
- 35. Система управления ВГП Система управления ВГП получает данные от систем пожарной безопасности и аэрогазового контроля. Вектор
- 36. Математическая модель вентилятора H = Hхх – CQ2, N = ρgHQ/ηн, где H – напор, развиваемый
- 37. Математическая модель вентилятора Момент сопротивления, создаваемый турбомеханизмами, принято описывать следующим выражением: Mc = Mc0 + βω2,
- 38. Математическая модель вентиляционной сети Hв = SQ2, где Hв – напор, подаваемый на вентиляционную сеть, S
- 39. Структурная схема электропривода вентилятора при поддержании заданного напора где kП’ – коэффициент передачи преобразователя частоты, β
- 40. Структурная схема электропривода вентилятора при поддержании заданной производительности Модель вентилятора и вентиляционной сети Модель преобразователя
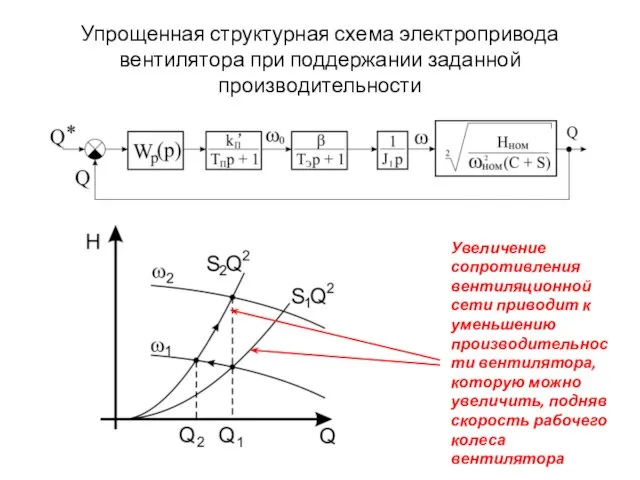
- 41. Упрощенная структурная схема электропривода вентилятора при поддержании заданной производительности Увеличение сопротивления вентиляционной сети приводит к уменьшению
- 42. Расчет регулятора электропривода вентилятора Желаемая передаточная функция Нескомпенсированная постоянная времени Для исключения статической ошибки регулирования в
- 43. Структурная схема блока взвешивания и САУВГП
- 44. АЭП ШАХТНЫХ КОНВЕЙЕРОВ Лекция 3
- 45. Общий вид конвейера где 1- ленточный настил; 2- натяжная каретка; 3- обводные ролики; М1 и М2-
- 46. Механическая подсистема электропривода конвейера где 1, 2- муфты; 3, 4- редукторы; ИО1, ИО2 – исполнительные органы
- 47. Упрощенная модель конвейера и его схема замещения ГБ, ПБ, НБ, ХБ – головной, приводной, натяжной и
- 48. Упрощенная математическая модель конвейера где M1 – крутящий (электромагнитный) момент привода конвейера; J1, J2 – моменты
- 49. Статическая механическая характеристика конвейера
- 50. Требования к АЭП конвейера Диапазон регулирования скорости: 10 : 1 Высокий пусковой момент (на уровне 2,5
- 51. Функциональная схема конвейера Задание момента для ведомых ПЧ формируется в ведущем ПЧ Натяжной барабан с натяжной
- 52. Структурная схема электропривода конвейера
- 53. Структурная схема электропривода конвейера При работе электродвигателей в группе (в хвостовой части или в головной) один
- 54. Распределение нагрузки в групповом электроприводе При работе с постоянной заданной скоростью двигателей с разными характеристиками в
- 55. Регулирование производительности конвейера Весы
- 56. Регулирование производительности конвейера Звено ограничения задания скорости конвейера При нулевой скорости, т.е. при пуске, конвейерные весы
- 57. Пуск и остановка конвейера в цепочке Этот ПЛК управляет пуском и остановом цепочки конвейеров
- 58. Взрывозащищенные электроприводы для шахтных конвейеров Преобразователь на поверхности (во взрывобезопасной среде) Преобразователь в шахте (во взрывоопасной
- 59. САУ ЛК БКИ – блок контроля изоляции; ШИЦ – шкаф изолированной цифровой связи; ЧП – частотный
- 60. ЧПСШ
- 61. ЧПСШ
- 62. ЧПСШ A1, A2, A7, A14 –ПЛК с подключенными блоками расширения; UZ1 -Контроллер привода RMIO-02C; M5-Вентилятор платы
- 63. Система охлаждения ЧПСШ Внутренний контур охлаждения Пластинчатый теплообменник выпрямителя Пластинчатый теплообменник инветора Пластинчатый теплообменник первого контура
- 64. Внешний контур охлаждения ЧПСШ Внешний контур охлаждения состоит из: расширительного бака 1; фильтра грубой очистки 3;
- 65. АЭП БОЛЬШЕГРУЗНЫХ АВТОСАМОСВАЛОВ Лекция 4
- 66. Внешний вид большегрузного автосамосвала
- 67. Особенности АЭП большегрузных автосамосвалов АЭП автономного транспортного средства характеризуется: ограниченностью мощности источника питания; жесткими требованиями к
- 68. Требования к АЭП большегрузных автосамосвалов Рациональная форма механической характеристики Требуемая внешняя характеристика генератора Диапазон регулирования скорости:
- 69. АЭП автосамосвала Белаз-75131 Двигательный режим
- 70. АЭП автосамосвала Белаз-75131 Режим торможения
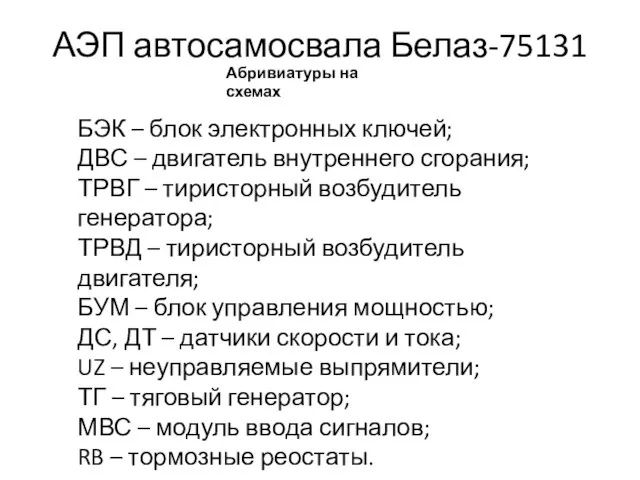
- 71. АЭП автосамосвала Белаз-75131 Абривиатуры на схемах БЭК – блок электронных ключей; ДВС – двигатель внутреннего сгорания;
- 72. АЭП автосамосвала Белаз-75131 ПЭС силовой части в двигательном режиме Обмотки тягового генератора
- 73. АЭП автосамосвала Белаз-75131 ПЭС силовой части в режиме торможения Во время торможения выполняется реверс тока обмотки
- 74. АЭП автосамосвала Белаз-75131 ПЭС силовой части в режиме ослабления поля двигателя Часть тока якоря минует обмотку
- 75. АЭП автосамосвала Белаз-75131 Характеристики АЭП автосамосвала в двигательном режиме Режим ограничения мощности дизель-генератора
- 76. АЭП автосамосвала Белаз-75131 Характеристики АЭП автосамосвала в режиме торможения Полная остановка не возможна, так как усилие
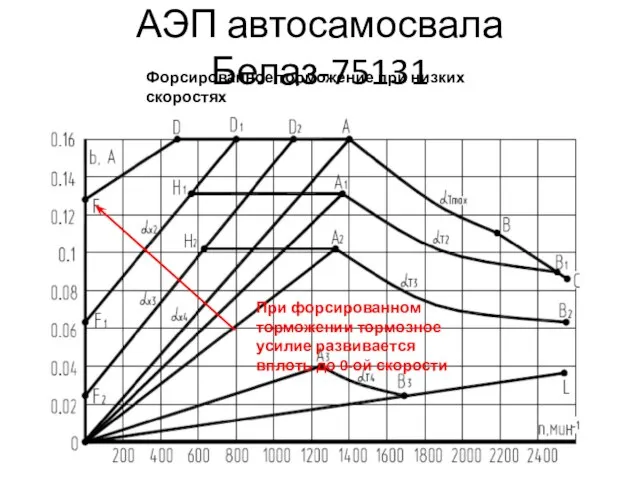
- 77. АЭП автосамосвала Белаз-75131 Форсированное торможение при низких скоростях При форсированном торможении тормозное усилие развивается вплоть до
- 78. АЭП автосамосвала БЕЛАЗ-75600 CSGB Управляющий компьютер Siemens Sibas-32 Инверторы
- 79. АЭП автосамосвала БЕЛАЗ-75600 CSGB
- 80. ОБЩИЕ ВОПРОСЫ СИНТЕЗА СИСТЕМ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОВ Лекция 5
- 81. Модель машины постоянного тока с независимым возбуждением
- 82. Модель машины постоянного тока с независимым возбуждением Статические характеристики Скорость холостого хода Жесткость статической механической характеристики
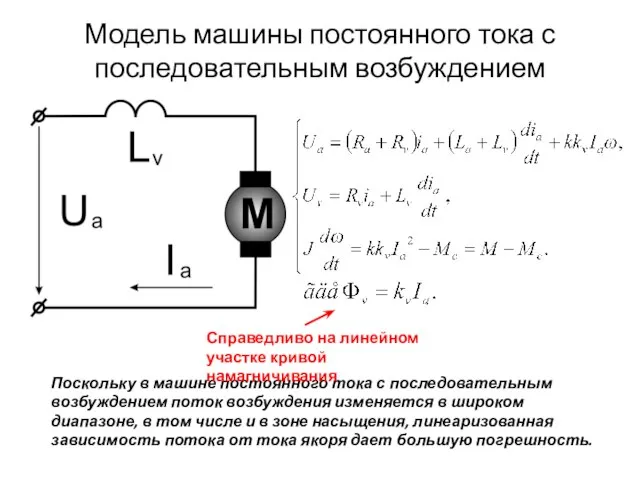
- 83. Модель машины постоянного тока с последовательным возбуждением Поскольку в машине постоянного тока с последовательным возбуждением поток
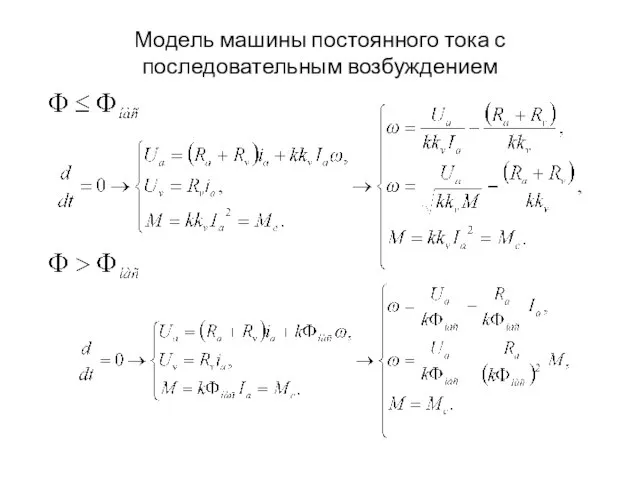
- 84. Модель машины постоянного тока с последовательным возбуждением
- 85. Статические характеристики машин постоянного тока ДПТ-НВ ДПТ-ПВ Скорость холостого хода Холостой ход не возможен
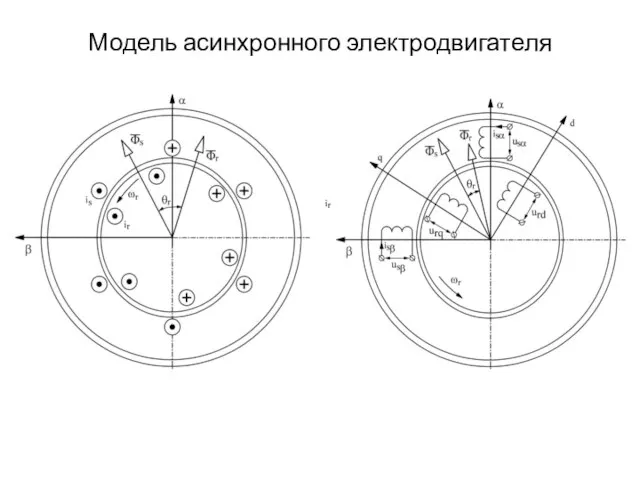
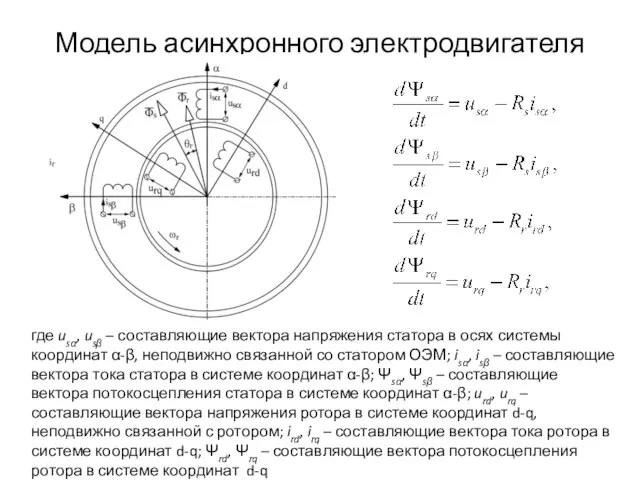
- 86. Модель асинхронного электродвигателя
- 87. Модель асинхронного электродвигателя где usα, usβ – составляющие вектора напряжения статора в осях системы координат α-β,
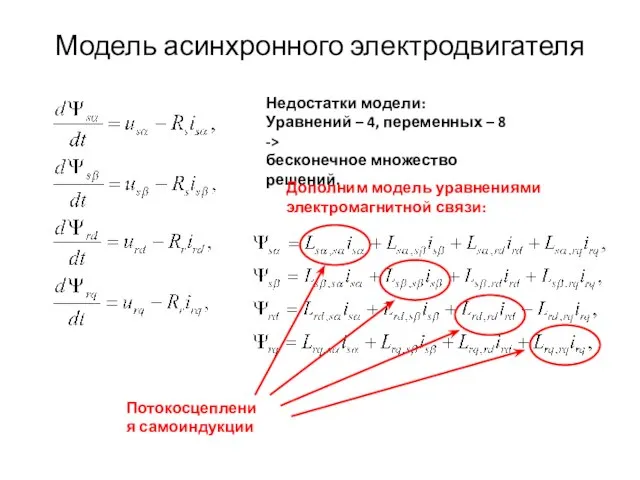
- 88. Модель асинхронного электродвигателя Недостатки модели: Уравнений – 4, переменных – 8 -> бесконечное множество решений. Дополним
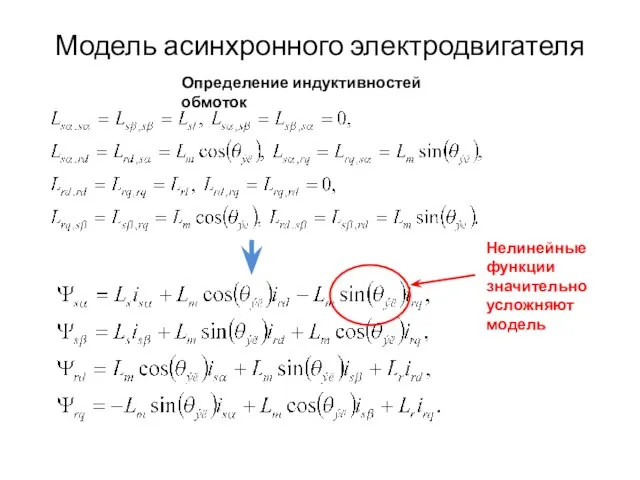
- 89. Модель асинхронного электродвигателя Определение индуктивностей обмоток Нелинейные функции значительно усложняют модель
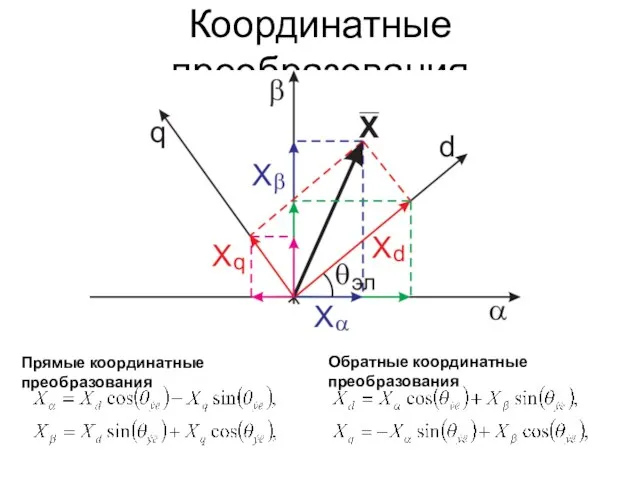
- 90. Координатные преобразования Прямые координатные преобразования Обратные координатные преобразования
- 91. Фазные преобразования Прямые фазные преобразования Обратные фазные преобразования Коэффициент связи определяет эквивалентность двухфазной и трехфазных машин
- 92. Электромагнитный момент асинхронного электродвигателя Энергия электромагнитного поля обмоток двигателя
- 93. Электромагнитный момент асинхронного электродвигателя
- 94. Конечная модель асинхронного электродвигателя
- 95. Динамическая механическая характеристика асинхронного электродвигателя
- 96. Линеаризация моделей электроприводов С целью упрощения моделей электроприводов (для получения возможности синтеза регуляторов систем управления) применяют
- 97. Синтез регулятора для систем управления электроприводов на основе линеаризованной модели 1. Желаемая передаточная функция при настройке
- 98. Синтез системы управления асинхронного электропривода на основе модели обобщенной электрической машины Векторное управление 1. Модель асинхронного
- 99. Синтез системы управления асинхронного электропривода на основе модели обобщенной электрической машины Векторное управление 2. Структурная схема
- 100. АЭП ШАХТНЫХ ПОДЪЕМНЫХ МАШИН Лекция 6
- 101. Общий вид и расположение оборудования 1 - Загрузочный бункер и дозатор. 2 - Камера опрокидывателя. 3
- 102. Модель шахтной подъемной машины Схема двухконцевой неуравновешенной установки
- 103. Электропривод переменного тока с реостатным регулированием ПК – путевой командоаппарат; ТК – тиристорный коммутатор; АУК –
- 104. Электропривод переменного тока по системе АВК МПСУ – микропроцессорная система управления; ПУ – программное устройство; РС
- 105. Нагрузочная диаграмма электропривода шахтного подъема по системе АВК При подъеме масса каната уменьшается вследствие его наматывания
- 106. АЭП по системе НПЧ-АД для шахтного подъема КА – командоаппарат; ПФ – преобразователь функциональный; ПК –
- 107. АЭП по системе ПЧ-АД для шахтного подъема
- 109. Скачать презентацию
АЭП КАРЬЕРНЫХ ЭКСКАВАТОРОВ
Глава 1
АЭП КАРЬЕРНЫХ ЭКСКАВАТОРОВ
Глава 1
Общий вид экскаватора
Общий вид экскаватора

Схема расположения оборудования
Основное оборудование:
1 – главный преобразовательный агрегат;
2 – электродвигатели подъема;
3
Схема расположения оборудования
Основное оборудование:
1 – главный преобразовательный агрегат;
2 – электродвигатели подъема;
3
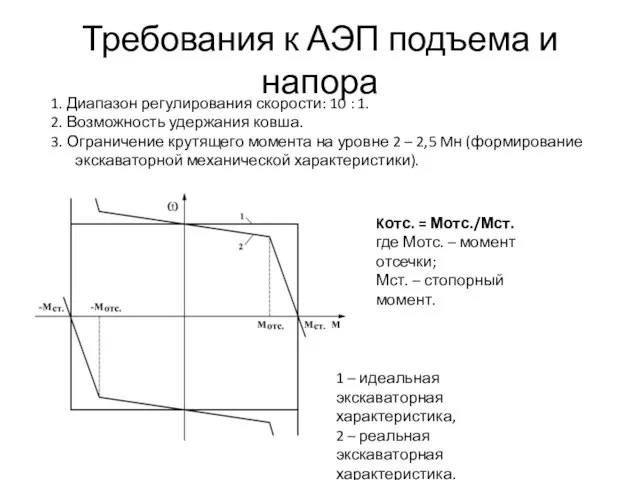
Требования к АЭП подъема и напора
1. Диапазон регулирования скорости: 10 :
Требования к АЭП подъема и напора
1. Диапазон регулирования скорости: 10 :
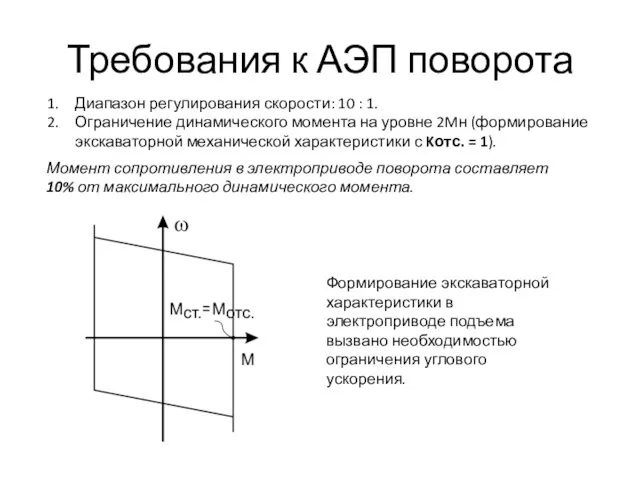
Требования к АЭП поворота
Диапазон регулирования скорости: 10 : 1.
Ограничение динамического момента
Требования к АЭП поворота
Диапазон регулирования скорости: 10 : 1.
Ограничение динамического момента
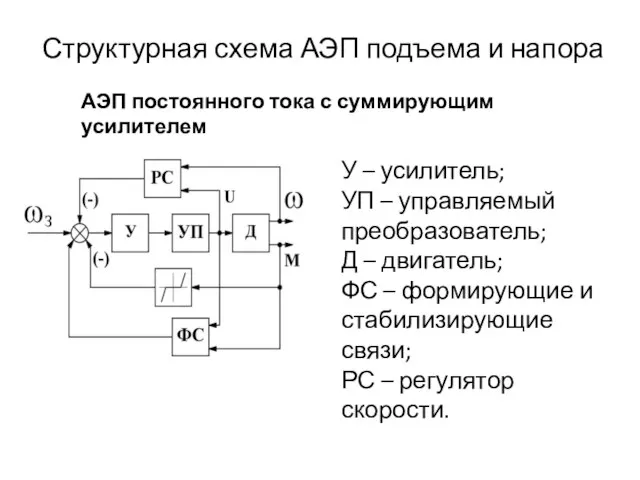
Структурная схема АЭП подъема и напора
У – усилитель;
УП – управляемый
Структурная схема АЭП подъема и напора
У – усилитель;
УП – управляемый
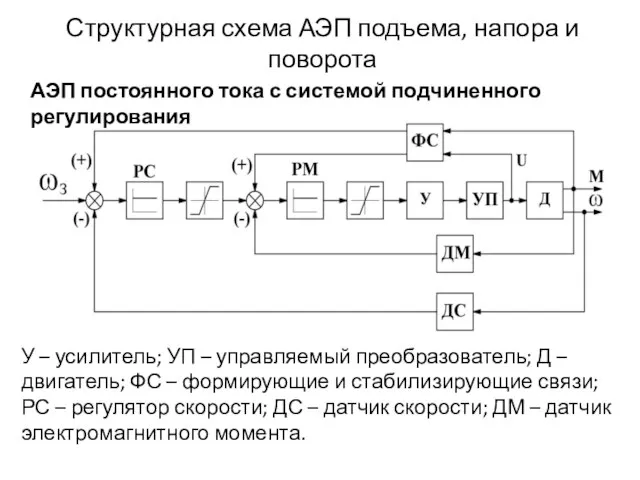
Структурная схема АЭП подъема, напора и поворота
АЭП постоянного тока с системой
Структурная схема АЭП подъема, напора и поворота
АЭП постоянного тока с системой
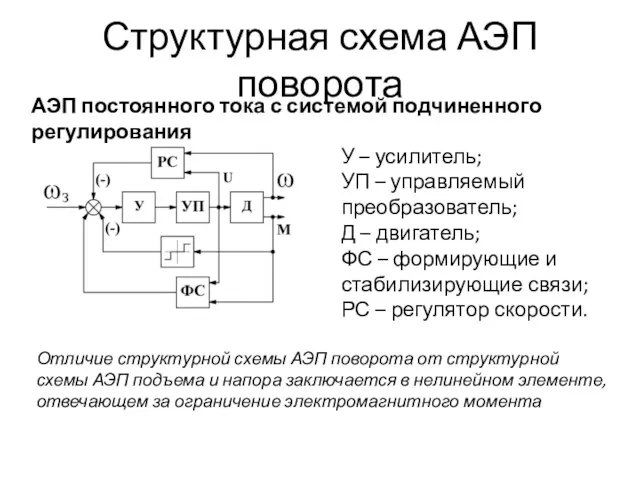
Структурная схема АЭП поворота
АЭП постоянного тока с системой подчиненного регулирования
У –
Структурная схема АЭП поворота
АЭП постоянного тока с системой подчиненного регулирования
У –

Структурная схема АЭП подъема, напора и поворота
АЭП переменного тока с системой
Структурная схема АЭП подъема, напора и поворота
АЭП переменного тока с системой

Структурная схема АЭП подъема, напора и поворота
АЭП переменного тока с системой
Структурная схема АЭП подъема, напора и поворота
АЭП переменного тока с системой
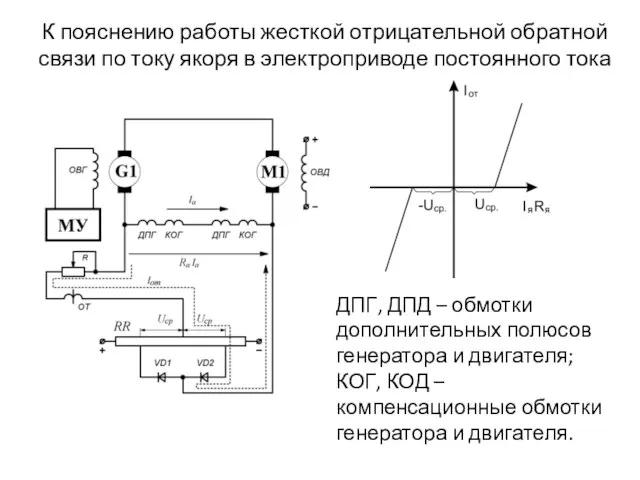
К пояснению работы жесткой отрицательной обратной
связи по току якоря в
К пояснению работы жесткой отрицательной обратной связи по току якоря в
К пояснению работы жесткой отрицательной обратной
связи по напряжению якоря в
К пояснению работы жесткой отрицательной обратной связи по напряжению якоря в
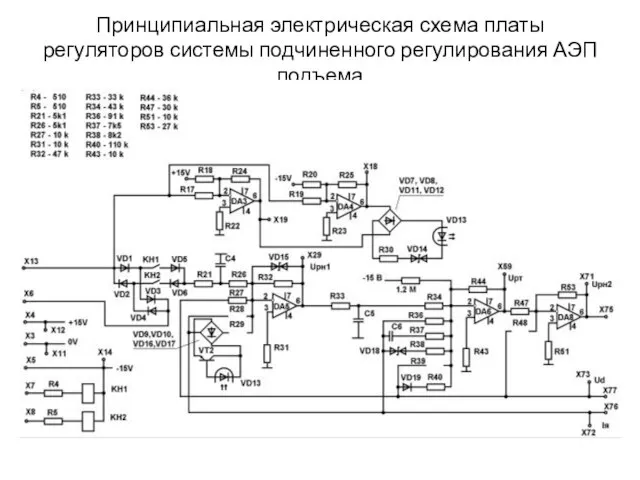
Принципиальная электрическая схема платы регуляторов системы подчиненного регулирования АЭП подъема
Принципиальная электрическая схема платы регуляторов системы подчиненного регулирования АЭП подъема

Структурная схема системы подчиненного регулирования АЭП подъема
Структурная схема системы подчиненного регулирования АЭП подъема

Однолинейная схема силовой части электроприводов переменного тока
Однолинейная схема силовой части электроприводов переменного тока

Внешний вид экскаватора P&H 4100C BOSS
Внешний вид экскаватора P&H 4100C BOSS

Схема расположения оборудования экскаватора P&H 4100C BOSS
Схема расположения оборудования экскаватора P&H 4100C BOSS

Однолинейная схема силовой части электроприводов переменного тока экскаватора P&H 4100C BOSS
Однолинейная схема силовой части электроприводов переменного тока экскаватора P&H 4100C BOSS

Электрооборудование экскаватора P&H 4100C BOSS
Инверторная секция
Шкаф контроллеров электроприводов
Шкаф ПЛК
Электрооборудование экскаватора P&H 4100C BOSS
Инверторная секция
Шкаф контроллеров электроприводов
Шкаф ПЛК
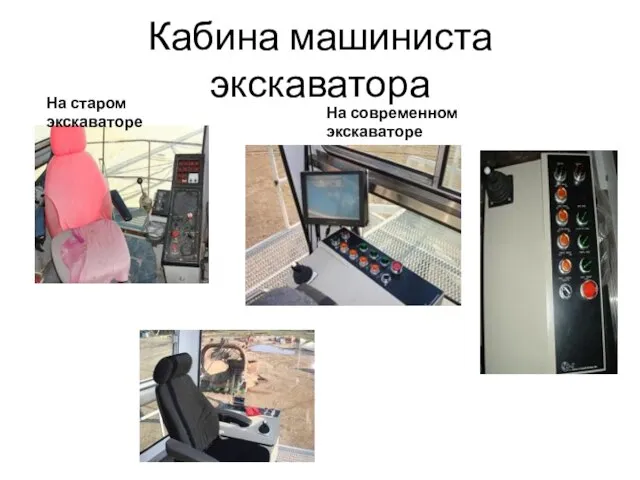
Кабина машиниста экскаватора
На старом экскаваторе
На современном экскаваторе
Кабина машиниста экскаватора
На старом экскаваторе
На современном экскаваторе

Особенности электродвигателей экскаватора P&H 4100
Характерная особенность – наличие датчика скорости и
Особенности электродвигателей экскаватора P&H 4100
Характерная особенность – наличие датчика скорости и

Особенности электродвигателей экскаватора P&H 4100
Характерная особенность ротора – наличие вентиляционных отверстий
Особенности электродвигателей экскаватора P&H 4100
Характерная особенность ротора – наличие вентиляционных отверстий

Высоковольтный коллекторно-щеточный узел
Обозначение на ПЭС
Внешний вид коллекторно-
щеточного узла
Высоковольтный коллекторно-щеточный узел
Обозначение на ПЭС
Внешний вид коллекторно-
щеточного узла
АЭП ВЕНТИЛЯТОРОВ ГЛАВНОГО ПРОВЕТРИВАНИЯ ШАХТ
Глава 2
АЭП ВЕНТИЛЯТОРОВ ГЛАВНОГО ПРОВЕТРИВАНИЯ ШАХТ
Глава 2

Внешний вид вентиляторов главного проветривания шахт
1 – подводящий канал;
2 – переключатель
Внешний вид вентиляторов главного проветривания шахт
1 – подводящий канал;
2 – переключатель

Внешний вид вентиляторов главного проветривания шахт
Вид сбоку
Внешний вид вентиляторов главного проветривания шахт
Вид сбоку
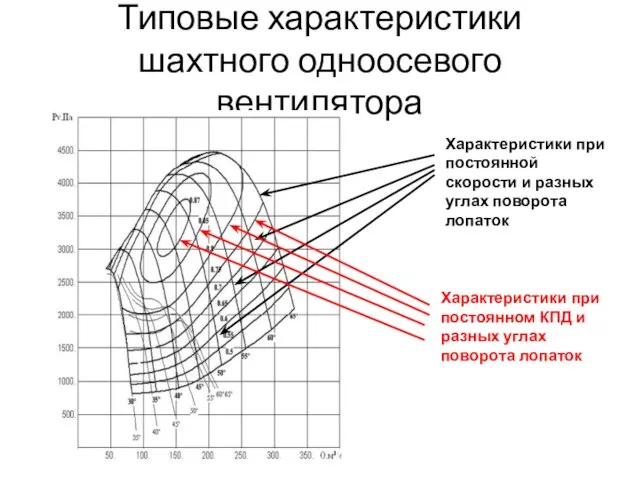
Типовые характеристики шахтного одноосевого вентилятора
Характеристики при
постоянной скорости и разных углах поворота
Типовые характеристики шахтного одноосевого вентилятора
Характеристики при
постоянной скорости и разных углах поворота
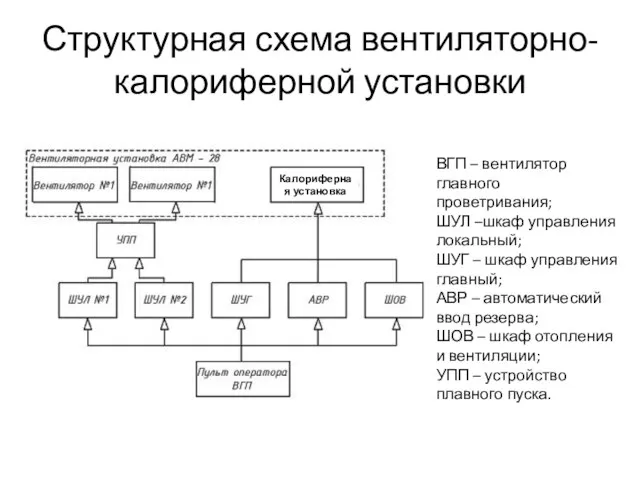
Структурная схема вентиляторно-калориферной установки
ВГП – вентилятор главного проветривания;
ШУЛ –шкаф управления локальный;
ШУГ
Структурная схема вентиляторно-калориферной установки
ВГП – вентилятор главного проветривания;
ШУЛ –шкаф управления локальный;
ШУГ
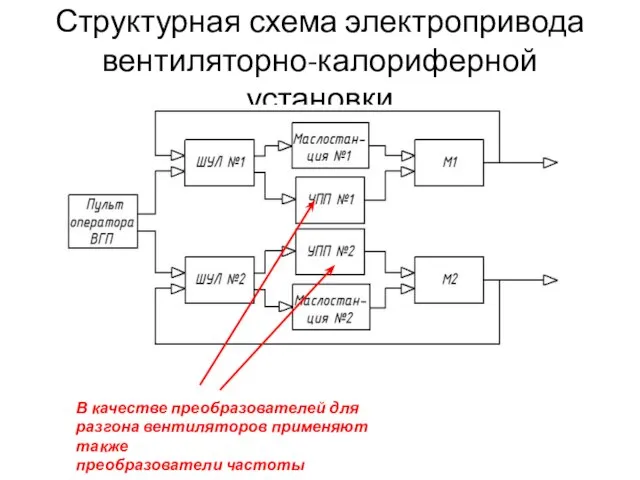
Структурная схема электропривода вентиляторно-калориферной установки
В качестве преобразователей для
разгона вентиляторов применяют также
преобразователи
Структурная схема электропривода вентиляторно-калориферной установки
В качестве преобразователей для
разгона вентиляторов применяют также
преобразователи

Структурная схема ШУЛ
Модуль ввода/вывода (Advantys STB)
Аппаратура управления тормозом
Аппаратура управления нагревателем
Блок контакт
Структурная схема ШУЛ
Модуль ввода/вывода (Advantys STB)
Аппаратура управления тормозом
Аппаратура управления нагревателем
Блок контакт
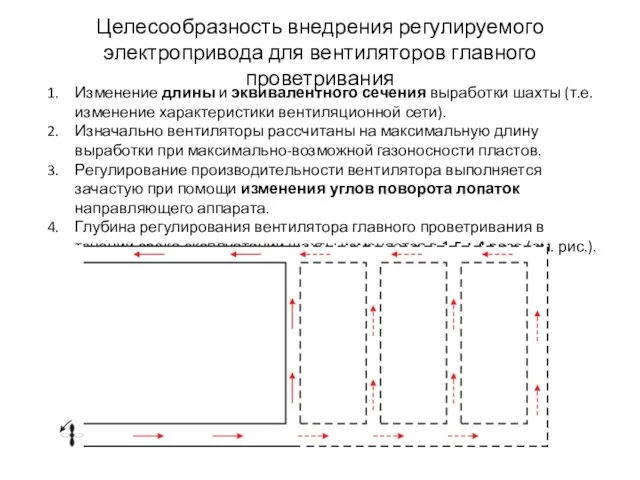
Целесообразность внедрения регулируемого электропривода для вентиляторов главного проветривания
Изменение длины и эквивалентного
Целесообразность внедрения регулируемого электропривода для вентиляторов главного проветривания
Изменение длины и эквивалентного
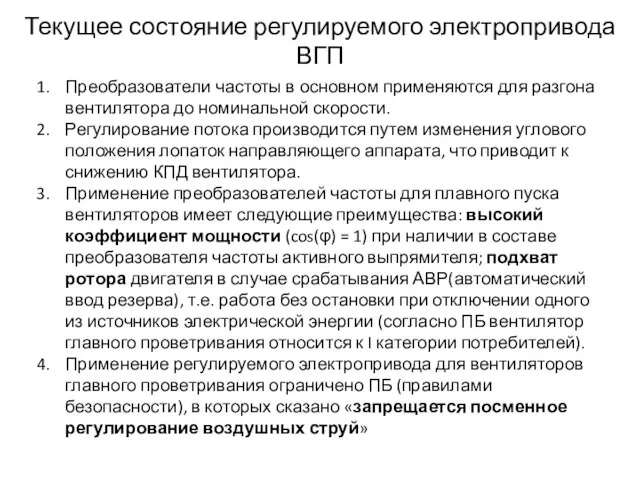
Текущее состояние регулируемого электропривода ВГП
Преобразователи частоты в основном применяются для
Текущее состояние регулируемого электропривода ВГП
Преобразователи частоты в основном применяются для
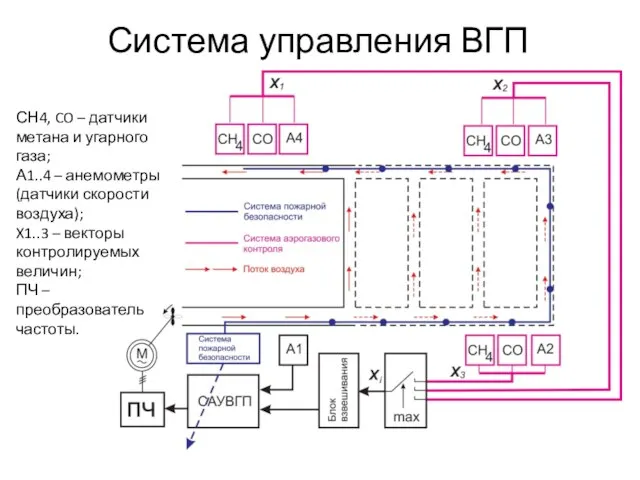
Система управления ВГП
СН4, CO – датчики метана и угарного газа;
А1..4 –
Система управления ВГП
СН4, CO – датчики метана и угарного газа;
А1..4 –
Система управления ВГП
Система управления ВГП получает данные от систем пожарной безопасности
Система управления ВГП
Система управления ВГП получает данные от систем пожарной безопасности
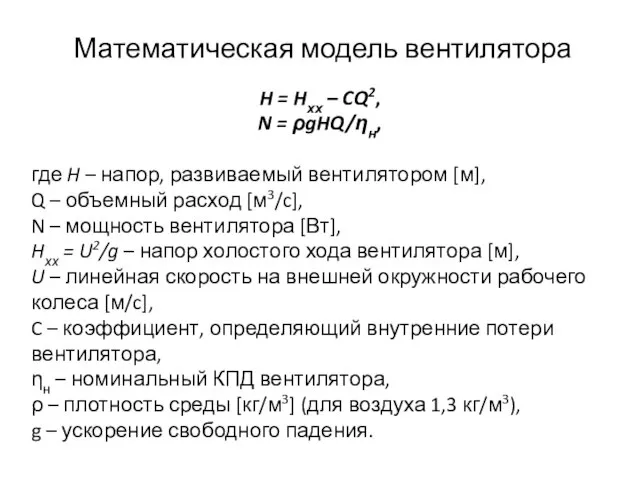
Математическая модель вентилятора
H = Hхх – CQ2,
N = ρgHQ/ηн,
где H –
Математическая модель вентилятора
H = Hхх – CQ2,
N = ρgHQ/ηн,
где H –
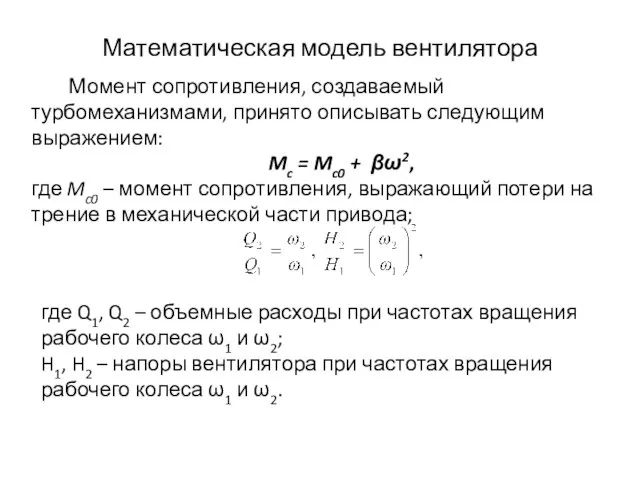
Математическая модель вентилятора
Момент сопротивления, создаваемый турбомеханизмами, принято описывать следующим выражением:
Mc =
Математическая модель вентилятора
Момент сопротивления, создаваемый турбомеханизмами, принято описывать следующим выражением:
Mc =
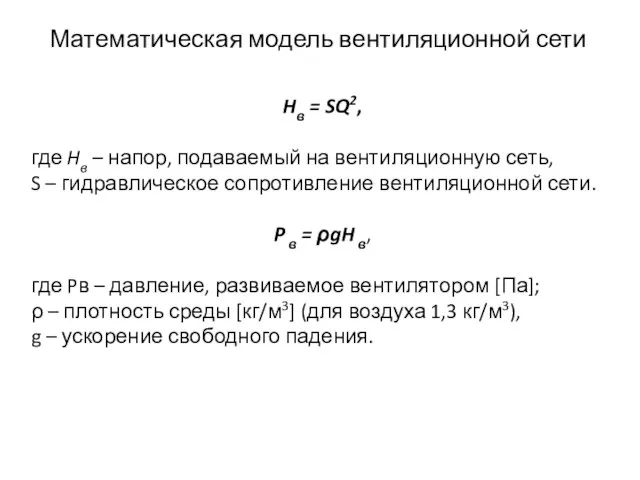
Математическая модель вентиляционной сети
Hв = SQ2,
где Hв – напор, подаваемый на
Математическая модель вентиляционной сети
Hв = SQ2,
где Hв – напор, подаваемый на
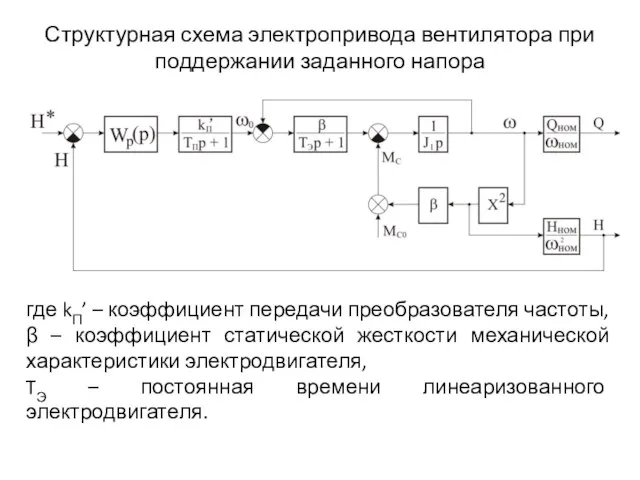
Структурная схема электропривода вентилятора при поддержании заданного напора
где kП’ – коэффициент
Структурная схема электропривода вентилятора при поддержании заданного напора
где kП’ – коэффициент
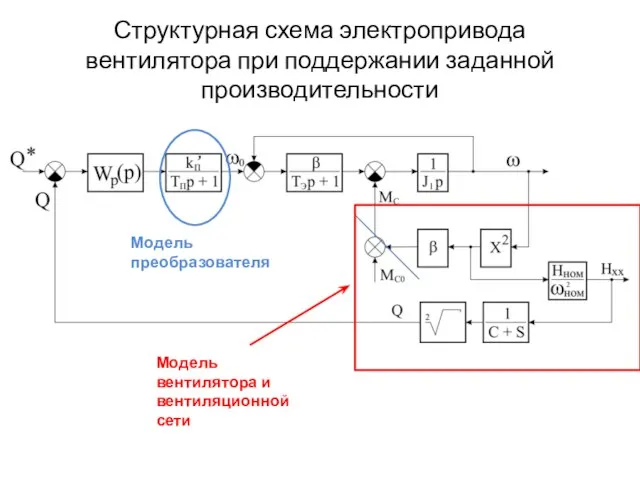
Структурная схема электропривода вентилятора при поддержании заданной производительности
Модель вентилятора и вентиляционной
Структурная схема электропривода вентилятора при поддержании заданной производительности
Модель вентилятора и вентиляционной
Упрощенная структурная схема электропривода вентилятора при поддержании заданной производительности
Увеличение сопротивления вентиляционной
Упрощенная структурная схема электропривода вентилятора при поддержании заданной производительности
Увеличение сопротивления вентиляционной
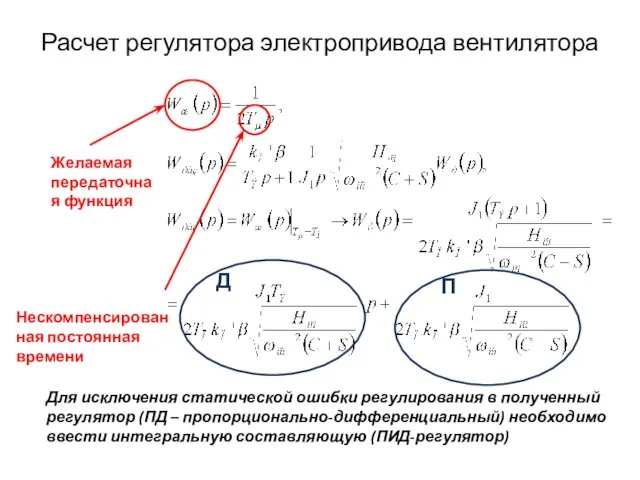
Расчет регулятора электропривода вентилятора
Желаемая передаточная функция
Нескомпенсированная постоянная времени
Для исключения статической ошибки
Расчет регулятора электропривода вентилятора
Желаемая передаточная функция
Нескомпенсированная постоянная времени
Для исключения статической ошибки
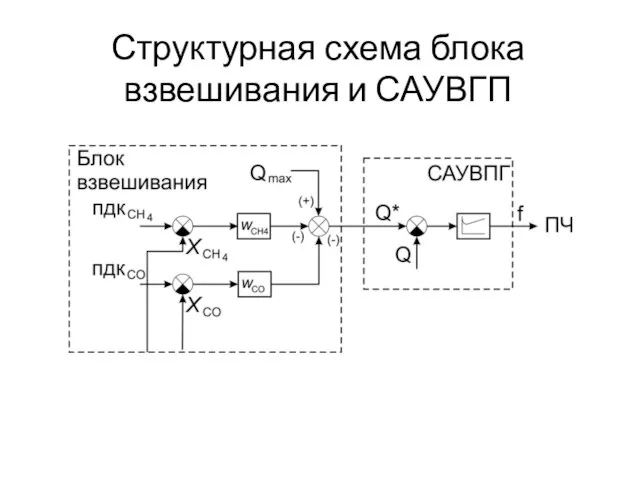
Структурная схема блока взвешивания и САУВГП
Структурная схема блока взвешивания и САУВГП
АЭП ШАХТНЫХ КОНВЕЙЕРОВ
Лекция 3
АЭП ШАХТНЫХ КОНВЕЙЕРОВ
Лекция 3

Общий вид конвейера
где 1- ленточный настил; 2- натяжная каретка; 3- обводные
Общий вид конвейера
где 1- ленточный настил; 2- натяжная каретка; 3- обводные
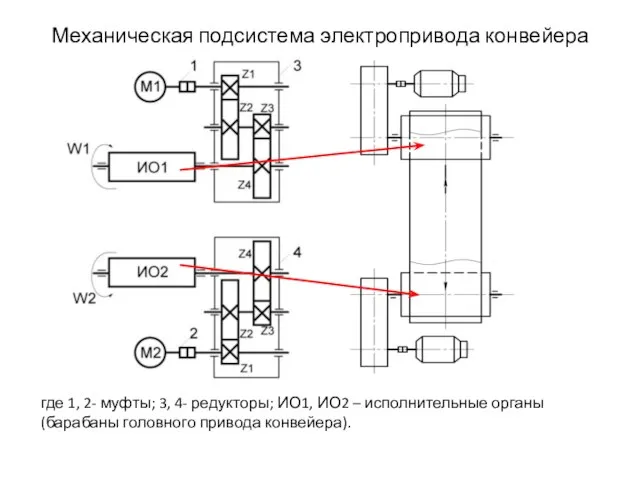
Механическая подсистема электропривода конвейера
где 1, 2- муфты; 3, 4- редукторы; ИО1,
Механическая подсистема электропривода конвейера
где 1, 2- муфты; 3, 4- редукторы; ИО1,
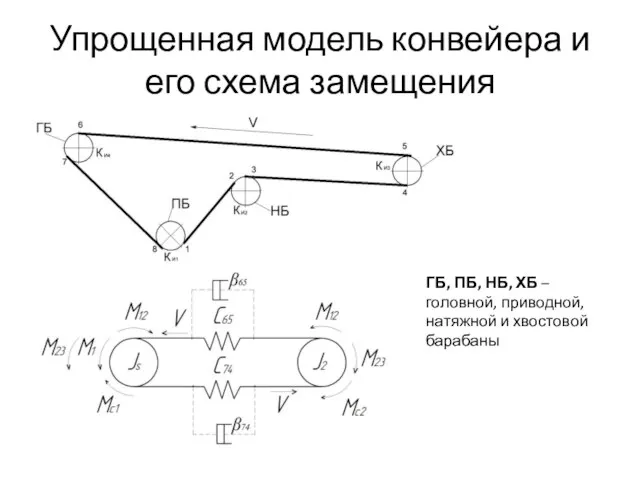
Упрощенная модель конвейера и его схема замещения
ГБ, ПБ, НБ, ХБ –
Упрощенная модель конвейера и его схема замещения
ГБ, ПБ, НБ, ХБ –
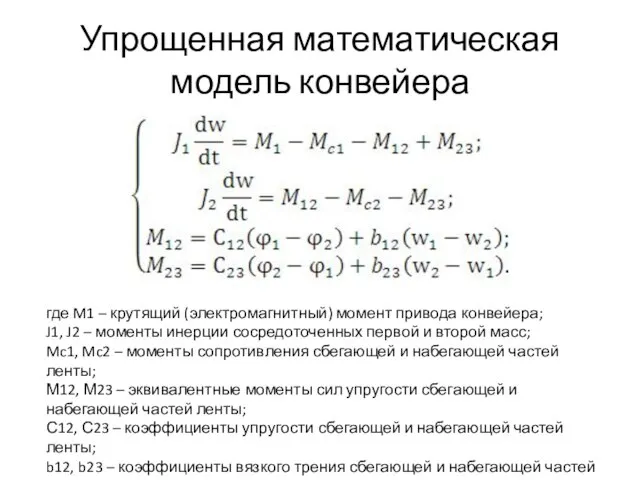
Упрощенная математическая модель конвейера
где M1 – крутящий (электромагнитный) момент привода конвейера;
Упрощенная математическая модель конвейера
где M1 – крутящий (электромагнитный) момент привода конвейера;

Статическая механическая характеристика конвейера
Статическая механическая характеристика конвейера
Требования к АЭП конвейера
Диапазон регулирования скорости: 10 : 1
Высокий пусковой момент
Требования к АЭП конвейера
Диапазон регулирования скорости: 10 : 1
Высокий пусковой момент
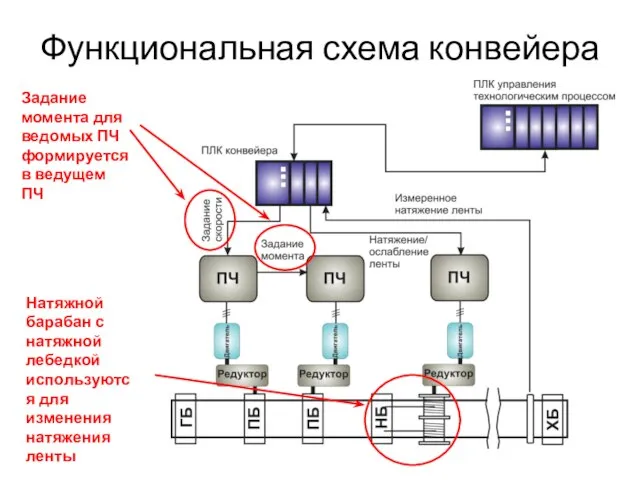
Функциональная схема конвейера
Задание момента для ведомых ПЧ формируется в ведущем ПЧ
Функциональная схема конвейера
Задание момента для ведомых ПЧ формируется в ведущем ПЧ
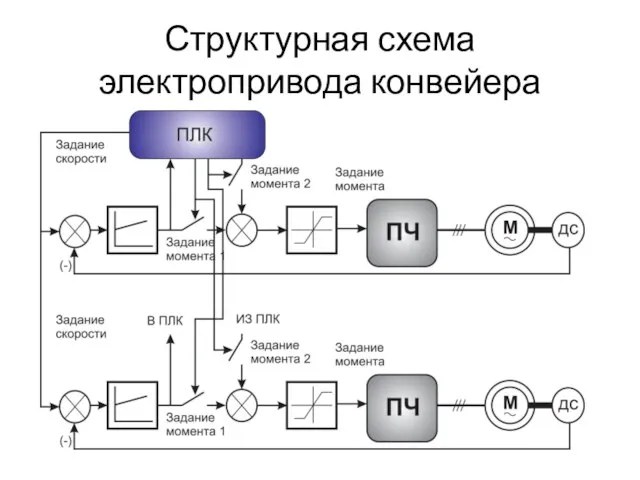
Структурная схема электропривода конвейера
Структурная схема электропривода конвейера
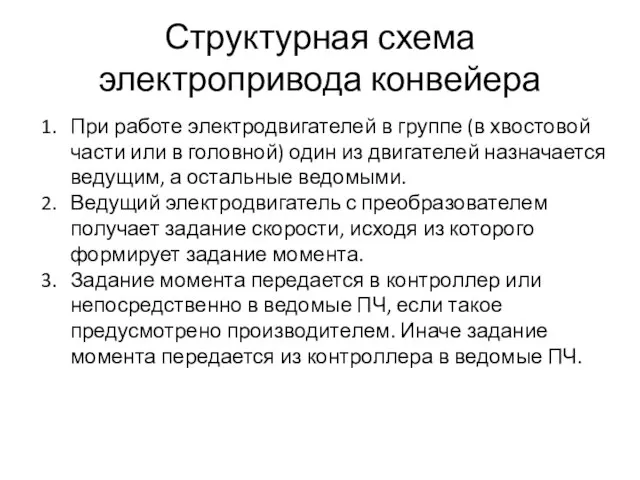
Структурная схема электропривода конвейера
При работе электродвигателей в группе (в хвостовой части
Структурная схема электропривода конвейера
При работе электродвигателей в группе (в хвостовой части
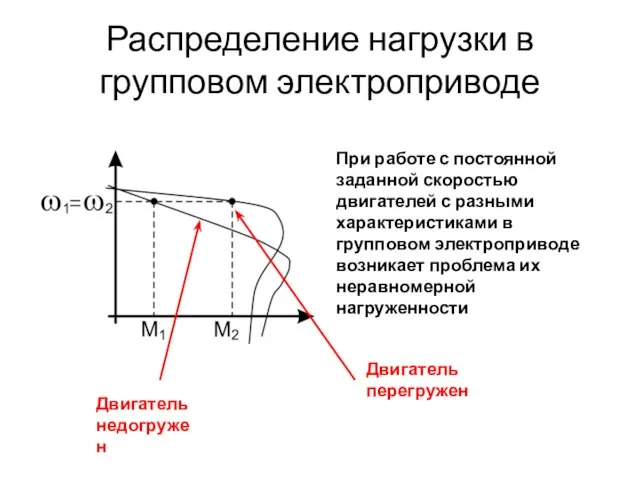
Распределение нагрузки в групповом электроприводе
При работе с постоянной заданной скоростью двигателей
Распределение нагрузки в групповом электроприводе
При работе с постоянной заданной скоростью двигателей
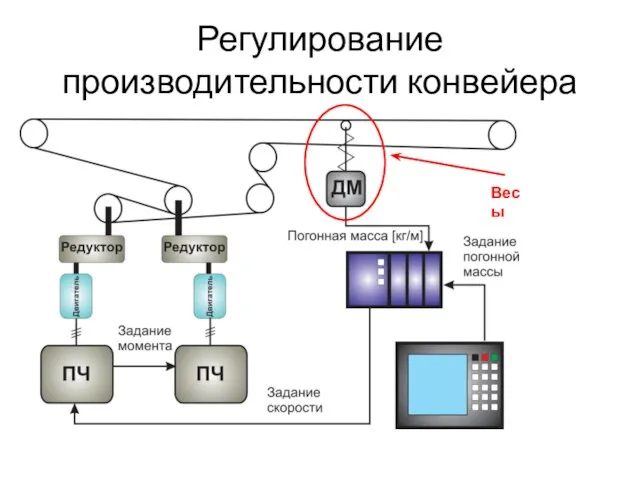
Регулирование производительности конвейера
Весы
Регулирование производительности конвейера
Весы
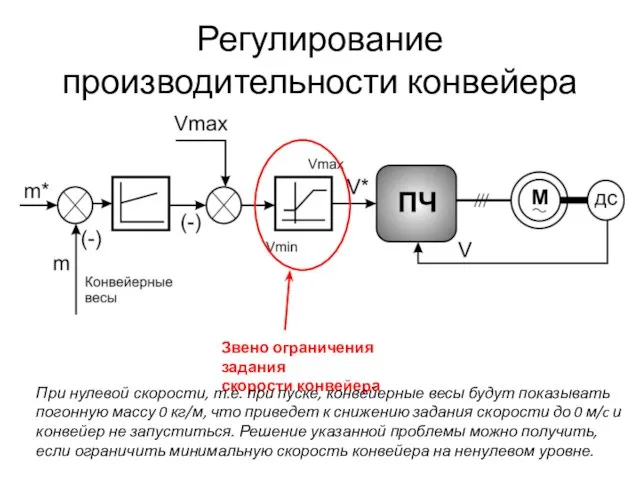
Регулирование производительности конвейера
Звено ограничения задания
скорости конвейера
При нулевой скорости, т.е. при пуске,
Регулирование производительности конвейера
Звено ограничения задания
скорости конвейера
При нулевой скорости, т.е. при пуске,
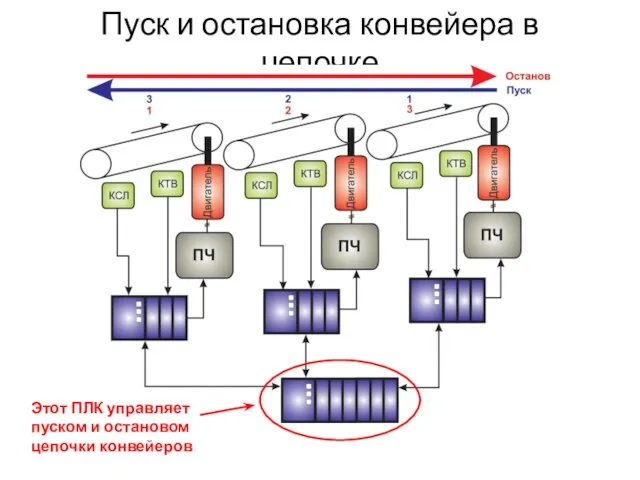
Пуск и остановка конвейера в цепочке
Этот ПЛК управляет
пуском и остановом цепочки
Пуск и остановка конвейера в цепочке
Этот ПЛК управляет
пуском и остановом цепочки

Взрывозащищенные электроприводы для шахтных конвейеров
Преобразователь на поверхности (во взрывобезопасной среде)
Преобразователь в
Взрывозащищенные электроприводы для шахтных конвейеров
Преобразователь на поверхности (во взрывобезопасной среде)
Преобразователь в
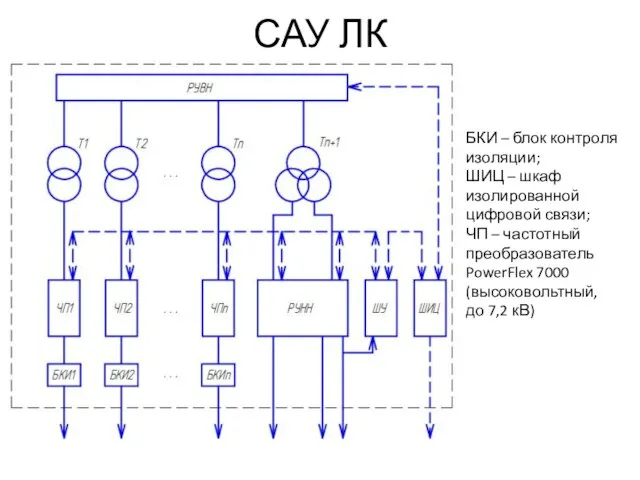
САУ ЛК
БКИ – блок контроля изоляции;
ШИЦ – шкаф изолированной цифровой связи;
ЧП
САУ ЛК
БКИ – блок контроля изоляции;
ШИЦ – шкаф изолированной цифровой связи;
ЧП
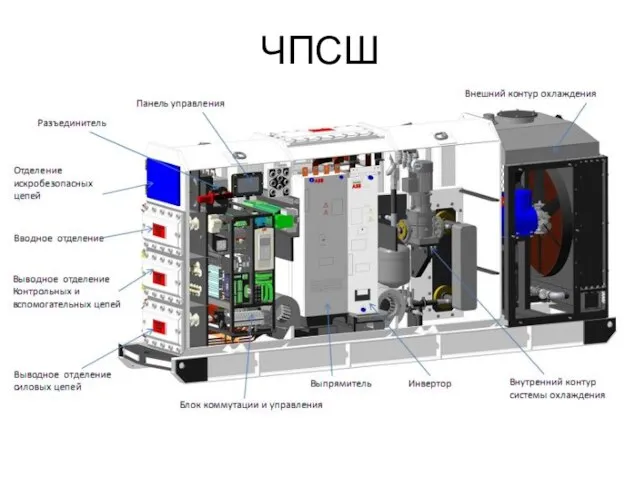
ЧПСШ
ЧПСШ

ЧПСШ
ЧПСШ
ЧПСШ
A1, A2, A7, A14 –ПЛК с подключенными блоками расширения; UZ1 -Контроллер
ЧПСШ
A1, A2, A7, A14 –ПЛК с подключенными блоками расширения; UZ1 -Контроллер
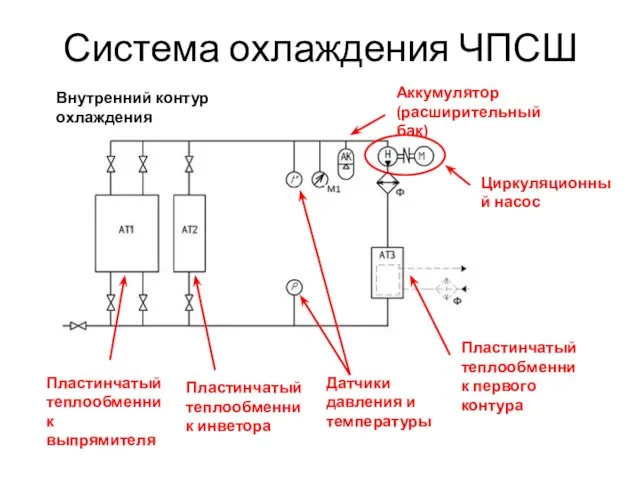
Система охлаждения ЧПСШ
Внутренний контур охлаждения
Пластинчатый теплообменник выпрямителя
Пластинчатый теплообменник инветора
Пластинчатый теплообменник первого
Система охлаждения ЧПСШ
Внутренний контур охлаждения
Пластинчатый теплообменник выпрямителя
Пластинчатый теплообменник инветора
Пластинчатый теплообменник первого
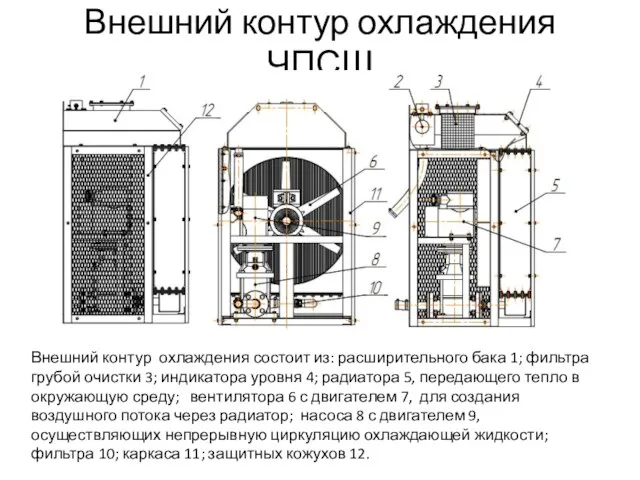
Внешний контур охлаждения ЧПСШ
Внешний контур охлаждения состоит из: расширительного бака 1;
Внешний контур охлаждения ЧПСШ
Внешний контур охлаждения состоит из: расширительного бака 1;
АЭП БОЛЬШЕГРУЗНЫХ АВТОСАМОСВАЛОВ
Лекция 4
АЭП БОЛЬШЕГРУЗНЫХ АВТОСАМОСВАЛОВ
Лекция 4

Внешний вид большегрузного автосамосвала
Внешний вид большегрузного автосамосвала

Особенности АЭП большегрузных автосамосвалов
АЭП автономного транспортного средства характеризуется:
ограниченностью мощности источника питания;
жесткими
Особенности АЭП большегрузных автосамосвалов
АЭП автономного транспортного средства характеризуется:
ограниченностью мощности источника питания;
жесткими
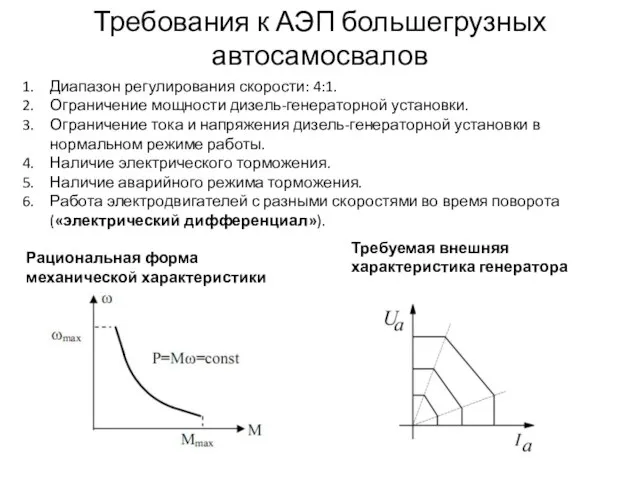
Требования к АЭП большегрузных автосамосвалов
Рациональная форма механической характеристики
Требуемая внешняя характеристика генератора
Диапазон
Требования к АЭП большегрузных автосамосвалов
Рациональная форма механической характеристики
Требуемая внешняя характеристика генератора
Диапазон
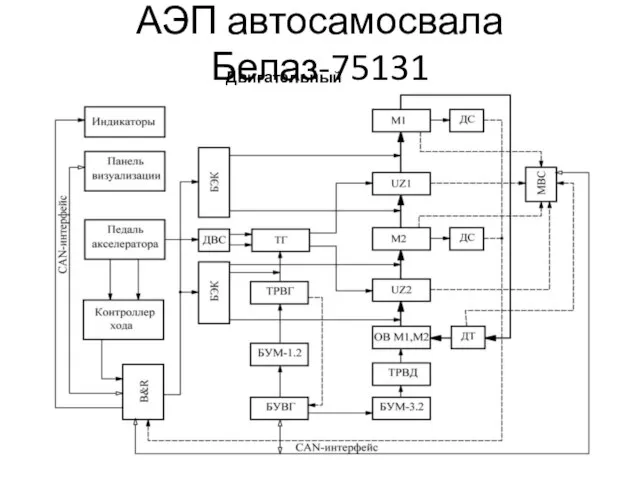
АЭП автосамосвала Белаз-75131
Двигательный режим
АЭП автосамосвала Белаз-75131
Двигательный режим

АЭП автосамосвала Белаз-75131
Режим торможения
АЭП автосамосвала Белаз-75131
Режим торможения
АЭП автосамосвала Белаз-75131
Абривиатуры на схемах
БЭК – блок электронных ключей;
ДВС – двигатель
АЭП автосамосвала Белаз-75131
Абривиатуры на схемах
БЭК – блок электронных ключей;
ДВС – двигатель
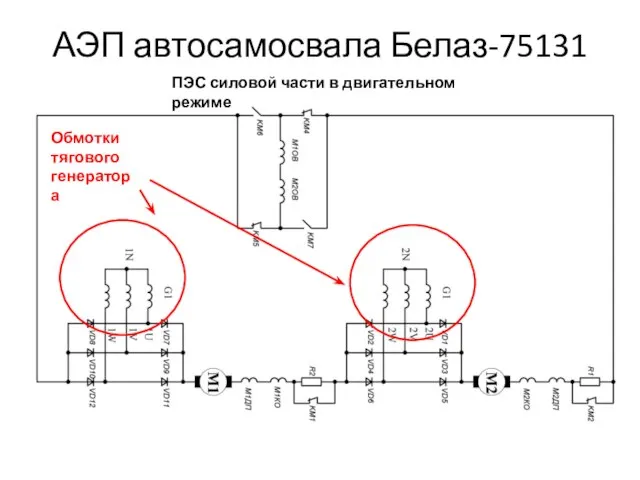
АЭП автосамосвала Белаз-75131
ПЭС силовой части в двигательном режиме
Обмотки тягового генератора
АЭП автосамосвала Белаз-75131
ПЭС силовой части в двигательном режиме
Обмотки тягового генератора
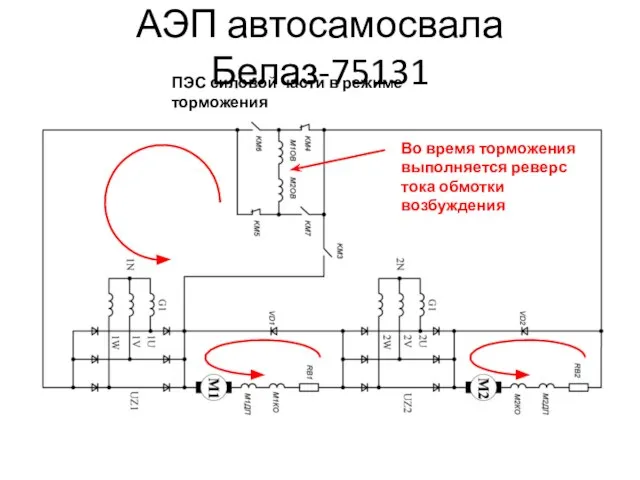
АЭП автосамосвала Белаз-75131
ПЭС силовой части в режиме торможения
Во время торможения
выполняется реверс
АЭП автосамосвала Белаз-75131
ПЭС силовой части в режиме торможения
Во время торможения
выполняется реверс
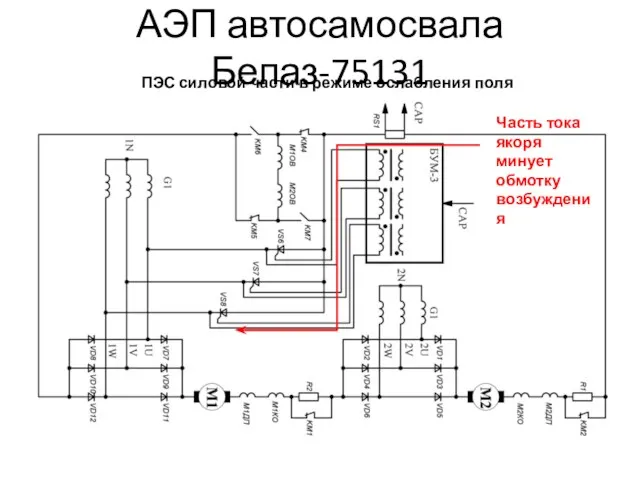
АЭП автосамосвала Белаз-75131
ПЭС силовой части в режиме ослабления поля двигателя
Часть тока
АЭП автосамосвала Белаз-75131
ПЭС силовой части в режиме ослабления поля двигателя
Часть тока
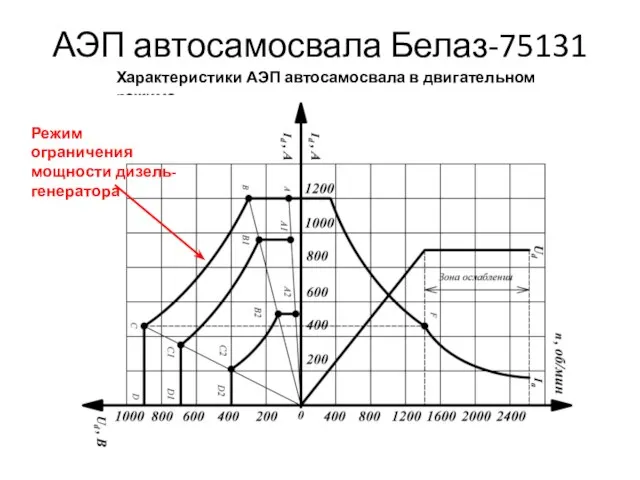
АЭП автосамосвала Белаз-75131
Характеристики АЭП автосамосвала в двигательном режиме
Режим ограничения мощности дизель-генератора
АЭП автосамосвала Белаз-75131
Характеристики АЭП автосамосвала в двигательном режиме
Режим ограничения мощности дизель-генератора

АЭП автосамосвала Белаз-75131
Характеристики АЭП автосамосвала в режиме торможения
Полная остановка не возможна,
АЭП автосамосвала Белаз-75131
Характеристики АЭП автосамосвала в режиме торможения
Полная остановка не возможна,
АЭП автосамосвала Белаз-75131
Форсированное торможение при низких скоростях
При форсированном торможении тормозное усилие
АЭП автосамосвала Белаз-75131
Форсированное торможение при низких скоростях
При форсированном торможении тормозное усилие

АЭП автосамосвала БЕЛАЗ-75600 CSGB
Управляющий компьютер Siemens Sibas-32
Инверторы
АЭП автосамосвала БЕЛАЗ-75600 CSGB
Управляющий компьютер Siemens Sibas-32
Инверторы
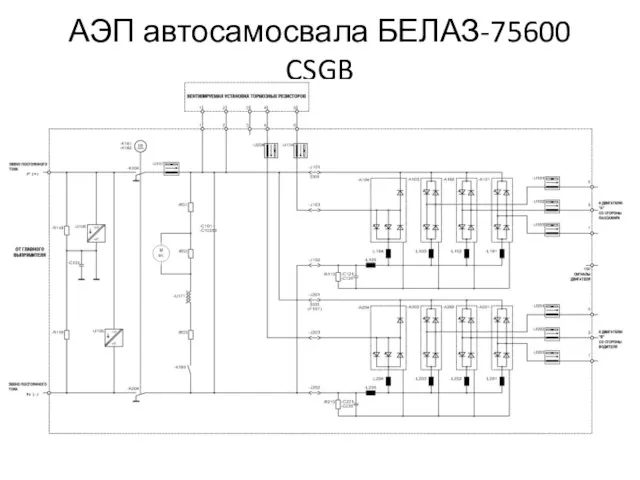
АЭП автосамосвала БЕЛАЗ-75600 CSGB
АЭП автосамосвала БЕЛАЗ-75600 CSGB
ОБЩИЕ ВОПРОСЫ СИНТЕЗА СИСТЕМ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОВ
Лекция 5
ОБЩИЕ ВОПРОСЫ СИНТЕЗА СИСТЕМ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОВ
Лекция 5

Модель машины постоянного тока с независимым возбуждением
Модель машины постоянного тока с независимым возбуждением
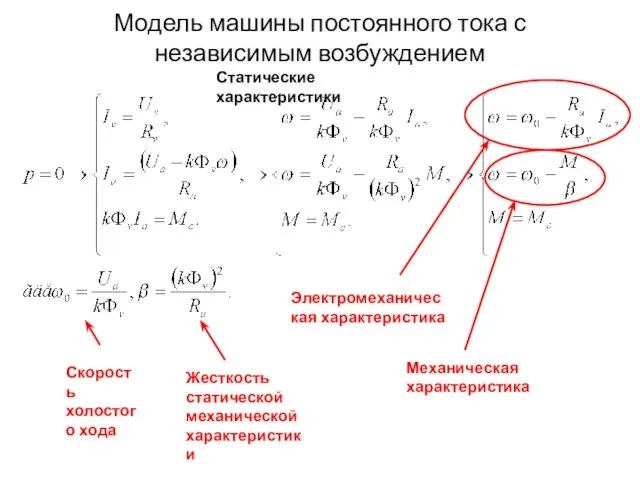
Модель машины постоянного тока с независимым возбуждением
Статические характеристики
Скорость холостого хода
Жесткость
Модель машины постоянного тока с независимым возбуждением
Статические характеристики
Скорость холостого хода
Жесткость
Модель машины постоянного тока с последовательным возбуждением
Поскольку в машине постоянного тока
Модель машины постоянного тока с последовательным возбуждением
Поскольку в машине постоянного тока
Модель машины постоянного тока с последовательным возбуждением
Модель машины постоянного тока с последовательным возбуждением
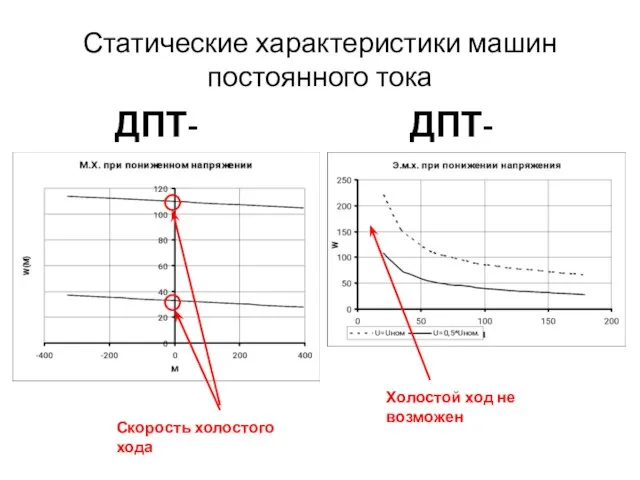
Статические характеристики машин постоянного тока
ДПТ-НВ
ДПТ-ПВ
Скорость холостого хода
Холостой ход не возможен
Статические характеристики машин постоянного тока
ДПТ-НВ
ДПТ-ПВ
Скорость холостого хода
Холостой ход не возможен
Модель асинхронного электродвигателя
Модель асинхронного электродвигателя
Модель асинхронного электродвигателя
где usα, usβ – составляющие вектора напряжения статора в
Модель асинхронного электродвигателя
где usα, usβ – составляющие вектора напряжения статора в
Модель асинхронного электродвигателя
Недостатки модели:
Уравнений – 4, переменных – 8 ->
бесконечное
Модель асинхронного электродвигателя
Недостатки модели:
Уравнений – 4, переменных – 8 ->
бесконечное
Модель асинхронного электродвигателя
Определение индуктивностей обмоток
Нелинейные функции значительно усложняют модель
Модель асинхронного электродвигателя
Определение индуктивностей обмоток
Нелинейные функции значительно усложняют модель
Координатные преобразования
Прямые координатные преобразования
Обратные координатные преобразования
Координатные преобразования
Прямые координатные преобразования
Обратные координатные преобразования

Фазные преобразования
Прямые фазные преобразования
Обратные фазные преобразования
Коэффициент связи определяет эквивалентность двухфазной и
Фазные преобразования
Прямые фазные преобразования
Обратные фазные преобразования
Коэффициент связи определяет эквивалентность двухфазной и
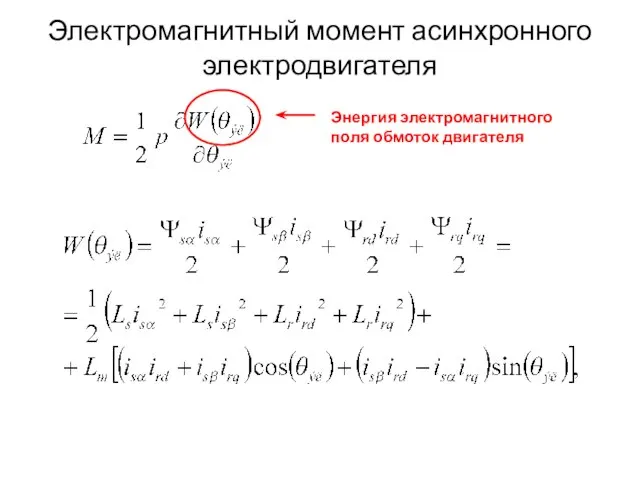
Электромагнитный момент асинхронного электродвигателя
Энергия электромагнитного поля обмоток двигателя
Электромагнитный момент асинхронного электродвигателя
Энергия электромагнитного поля обмоток двигателя
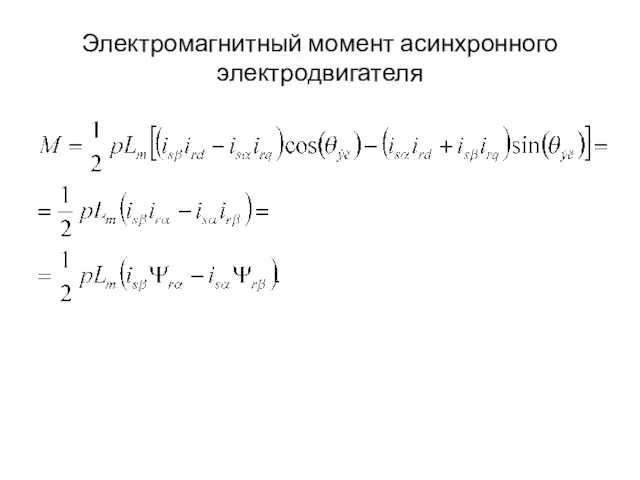
Электромагнитный момент асинхронного электродвигателя
Электромагнитный момент асинхронного электродвигателя

Конечная модель асинхронного электродвигателя
Конечная модель асинхронного электродвигателя
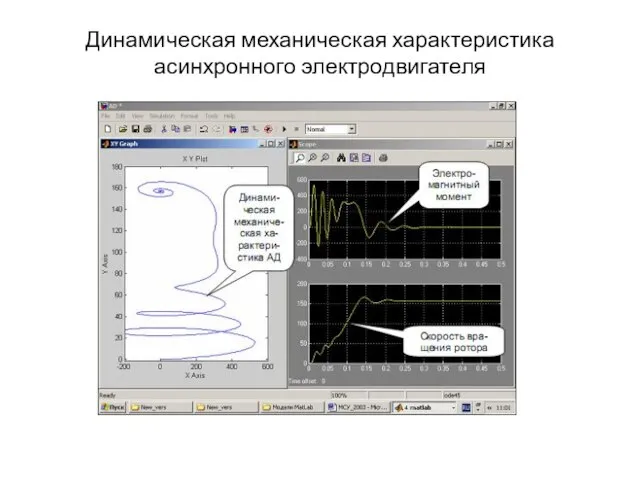
Динамическая механическая характеристика асинхронного электродвигателя
Динамическая механическая характеристика асинхронного электродвигателя
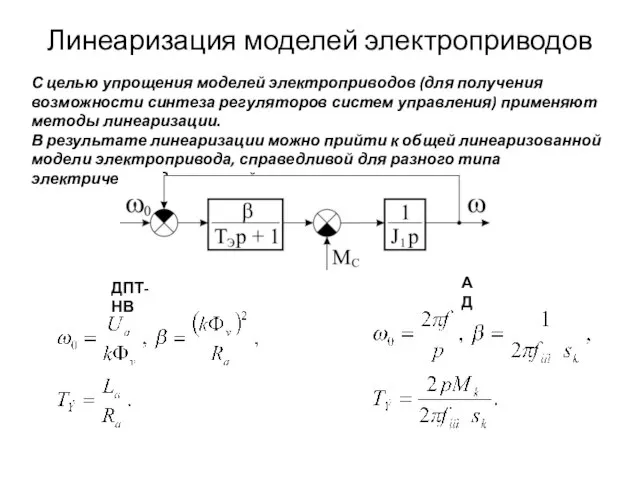
Линеаризация моделей электроприводов
С целью упрощения моделей электроприводов (для получения возможности синтеза
Линеаризация моделей электроприводов
С целью упрощения моделей электроприводов (для получения возможности синтеза
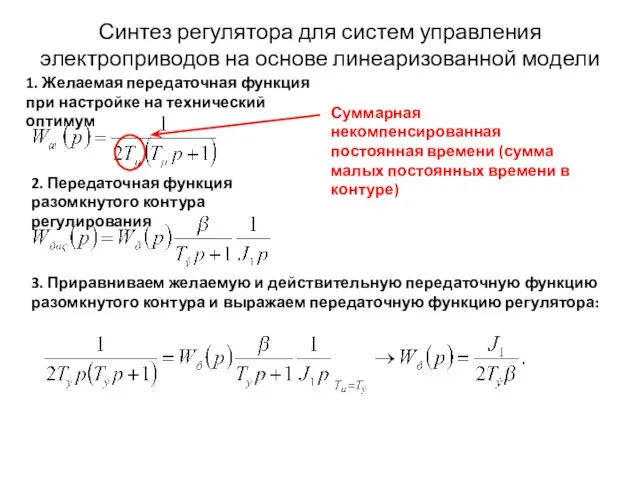
Синтез регулятора для систем управления электроприводов на основе линеаризованной модели
1. Желаемая
Синтез регулятора для систем управления электроприводов на основе линеаризованной модели
1. Желаемая
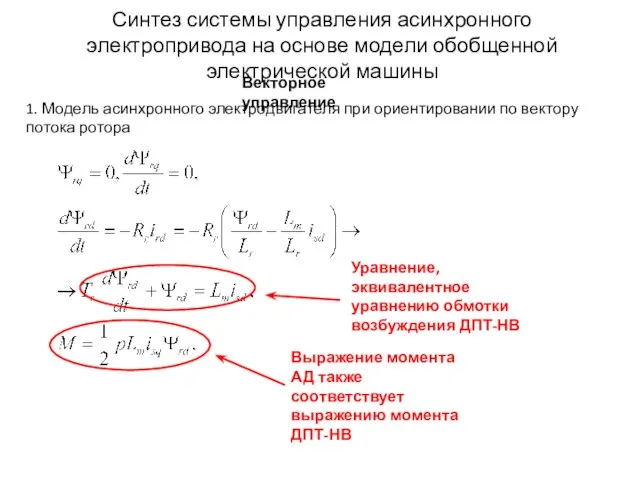
Синтез системы управления асинхронного электропривода на основе модели обобщенной электрической машины
Векторное
Синтез системы управления асинхронного электропривода на основе модели обобщенной электрической машины
Векторное

Синтез системы управления асинхронного электропривода на основе модели обобщенной электрической машины
Векторное
Синтез системы управления асинхронного электропривода на основе модели обобщенной электрической машины
Векторное
АЭП ШАХТНЫХ ПОДЪЕМНЫХ МАШИН
Лекция 6
АЭП ШАХТНЫХ ПОДЪЕМНЫХ МАШИН
Лекция 6

Общий вид и расположение оборудования
1 - Загрузочный бункер и дозатор.
2 -
Общий вид и расположение оборудования
1 - Загрузочный бункер и дозатор.
2 -
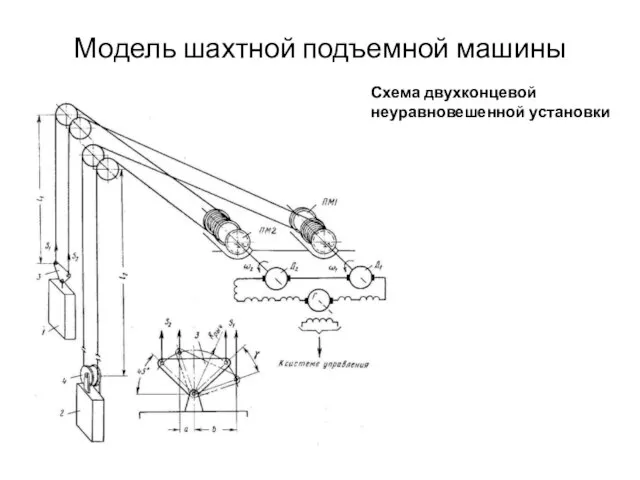
Модель шахтной подъемной машины
Схема двухконцевой неуравновешенной установки
Модель шахтной подъемной машины
Схема двухконцевой неуравновешенной установки
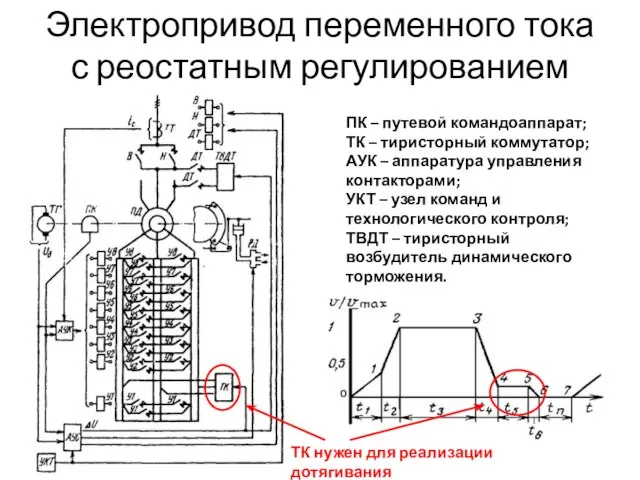
Электропривод переменного тока с реостатным регулированием
ПК – путевой командоаппарат;
ТК – тиристорный
Электропривод переменного тока с реостатным регулированием
ПК – путевой командоаппарат;
ТК – тиристорный
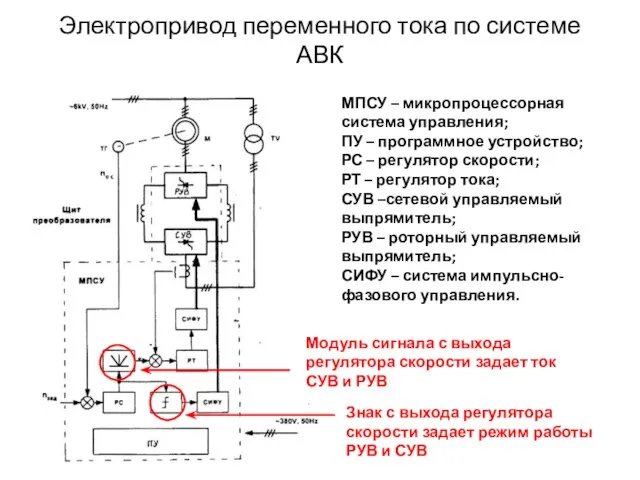
Электропривод переменного тока по системе АВК
МПСУ – микропроцессорная система управления;
ПУ –
Электропривод переменного тока по системе АВК
МПСУ – микропроцессорная система управления;
ПУ –

Нагрузочная диаграмма электропривода шахтного подъема по системе АВК
При подъеме масса каната
Нагрузочная диаграмма электропривода шахтного подъема по системе АВК
При подъеме масса каната
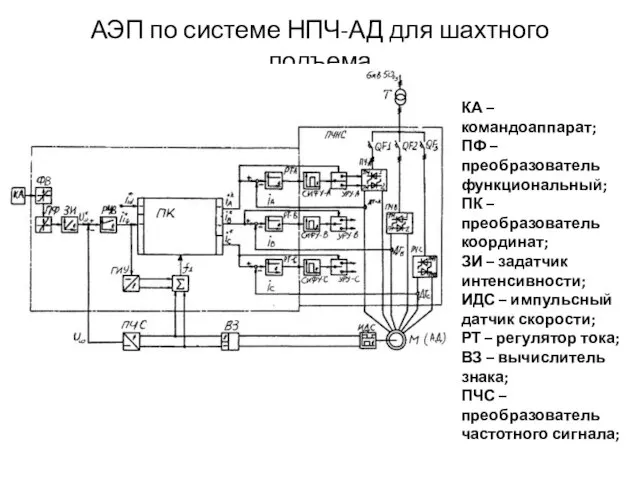
АЭП по системе НПЧ-АД для шахтного подъема
КА – командоаппарат;
ПФ – преобразователь
АЭП по системе НПЧ-АД для шахтного подъема
КА – командоаппарат;
ПФ – преобразователь

АЭП по системе ПЧ-АД для шахтного подъема
АЭП по системе ПЧ-АД для шахтного подъема
Похожие презентации
 Антенны WLAN
Антенны WLAN Активные формы и методы, используемые в процессе трудового обучения Штукатурно-малярное дело
Активные формы и методы, используемые в процессе трудового обучения Штукатурно-малярное дело Организация внутреннего пространства сооружений
Организация внутреннего пространства сооружений Эмульсия для физических фильтров в дисперсии
Эмульсия для физических фильтров в дисперсии Контактная зона предприятий индустрии красоты и процесс предоставления услуг
Контактная зона предприятий индустрии красоты и процесс предоставления услуг Твоя любов, немов ріка
Твоя любов, немов ріка Наземно-скважинная электроразведка (НСЭ)
Наземно-скважинная электроразведка (НСЭ) Общение и межличностные отношения
Общение и межличностные отношения Основы литейного производства
Основы литейного производства Теплоизолированные трубы Uponor Ecoflex
Теплоизолированные трубы Uponor Ecoflex Основные детали электромеханических приборов
Основные детали электромеханических приборов Чьи праздники праздную, тому и принадлежу
Чьи праздники праздную, тому и принадлежу Алгоритм продаж
Алгоритм продаж проект Достижения 2021_защита
проект Достижения 2021_защита История Bluetooth
История Bluetooth Концепция устойчивого развития
Концепция устойчивого развития Топливно-энергетический комплекс и его роль в народном хозяйстве
Топливно-энергетический комплекс и его роль в народном хозяйстве Презентация 27 08 2022
Презентация 27 08 2022 Prezentatsia_10
Prezentatsia_10 искусство туризма
искусство туризма PREZENT_K_ZADANIYaM_po_KR_PZ
PREZENT_K_ZADANIYaM_po_KR_PZ
 Конструкторско-технологический анализ межплатных соединителей
Конструкторско-технологический анализ межплатных соединителей Техническая документация
Техническая документация Prezentatsia_Uezdny_gorod_N
Prezentatsia_Uezdny_gorod_N 3D Printing
3D Printing Асинхронный режимы
Асинхронный режимы 20161007_prezentatsiya_
20161007_prezentatsiya_