- Технологии беспилотного управления для железнодорожного транспорта

Содержание
- 2. Беспилотные системы на железнодорожном транспорте в мире Голландская инфраструктурная компания в 2016 году объявила о планах
- 3. Беспилотный маневровый локомотив ТЭМ-7А на станции Лужской Определение расстояния до вагонов при сцепке; Обнаружение препятствий и
- 4. Беспилотный электропоезд ЭС2Г на МЦК
- 5. Испытания на основе стенда для отработки блока обнаружения препятствий Тестирование разного вида сенсоров; Проверка алгоритмов по
- 6. Датчики для системы технического зрения Обнаружение препятствий
- 7. Современная оптика позволяет видеть на расстоянии большем, чем возможности человеческого зрения. Разные фокусные расстояния позволяют разносить
- 8. Исходный вид с камеры Вид с увеличением масштаба
- 9. Радары Continental ARS-408-21 и ARS-408-21SC
- 10. Радар Bosch MRR F037 B00 255 Радар Bosch MRR F037 B00 255
- 11. Лидар IBEO SCALA B2
- 12. Пример данных с лидара IBEO SCALA B2 (подъезд маневрового локомотива к вагонам) Основные задачи: Кластеризация данных
- 13. Наложение данных лидара на видеоизображение
- 14. NVIDIA QUALCOMM DRIVE PX 2 ОСНОВНЫЕ ПЛАТФОРМЫ ДЛЯ АВТОНОМНОГО ДВИЖЕНИЯ INTEL GO (ПЛАТФОРМА 5G) https://www.forbes.com/sites/moorinsights/2017/01/23/chipmakers-get-serious-about-autonomous-driving-at-ces-2017/#55415cfd18ba
- 15. Основные задачи
- 16. Выбор сенсоров Основные задачи: Мониторинг рынка и анализ новых разработок, участие в конференциях; Формирование технических заданий
- 17. концерн радиостроения «Вега»; Томский государственный университет систем управления и радиоэлектроники; Московский государственный технический университет им. Н.Э.
- 18. Определение рельсовой колеи аналитическими методами Основные задачи: Кластеризация данных лидара; Создание изображения в обратной перспективе Предварительная
- 19. Распознавание пути методами машинного обучения Препроцессинг данных Подготовка датасетов для обучения Выбор типа нейронной сети (классификация,
- 20. Распознавание сигналов светофора Препроцессинг изображения Подготовка обучающей выборки (“набивание” датасета, аугментация данных) Выбор техник обработки изображений
- 21. Распознавание и классификация препятствий на пути Препроцессинг изображения Подготовка обучающей выборки (использование готовых датасетов (KITTI,COCO,ImageNet,“набивание” датасета,
- 22. Высокоточное позиционирование подвижного состава Требования по точности ±0,5 м Используемые системы координат: Геодезическая; Линейная (железнодорожная); Относительная.
- 23. Создание 3D карт
- 24. Архитектура сети связи На борт поезда Разрешенная дистанция для проследования Профиль скорости Профиль уклонов пути Временные
- 25. Классификация услуг связи в сетях LTE
- 26. Дистанционное управление Рабочее место для машиниста - оператора Дистанционно управляемый электропоезд ЭС2Г «Ласточка»
- 28. Скачать презентацию

Беспилотные системы на железнодорожном транспорте в мире
Голландская инфраструктурная компания в 2016
Беспилотные системы на железнодорожном транспорте в мире
Голландская инфраструктурная компания в 2016
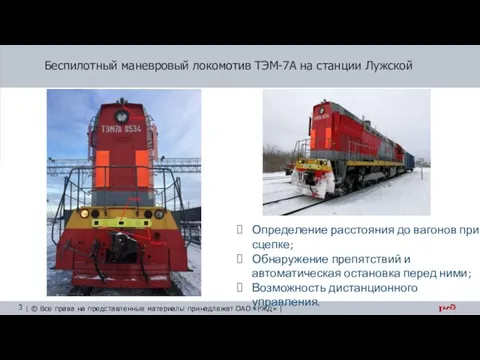
Беспилотный маневровый локомотив ТЭМ-7А на станции Лужской
Определение расстояния до вагонов
Беспилотный маневровый локомотив ТЭМ-7А на станции Лужской
Определение расстояния до вагонов
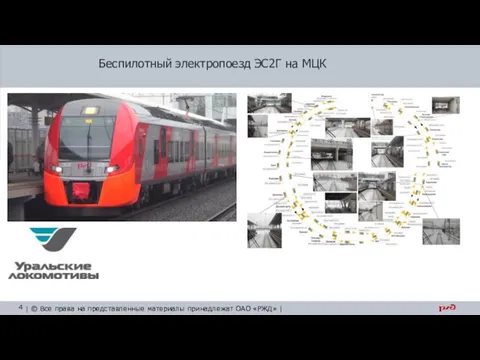
Беспилотный электропоезд ЭС2Г на МЦК
Беспилотный электропоезд ЭС2Г на МЦК
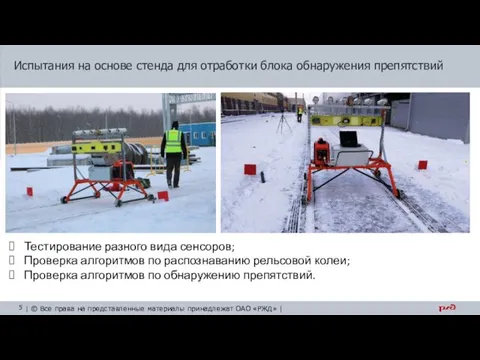
Испытания на основе стенда для отработки блока обнаружения препятствий
Тестирование разного вида
Испытания на основе стенда для отработки блока обнаружения препятствий
Тестирование разного вида

Датчики для системы технического зрения
Обнаружение препятствий
Датчики для системы технического зрения
Обнаружение препятствий
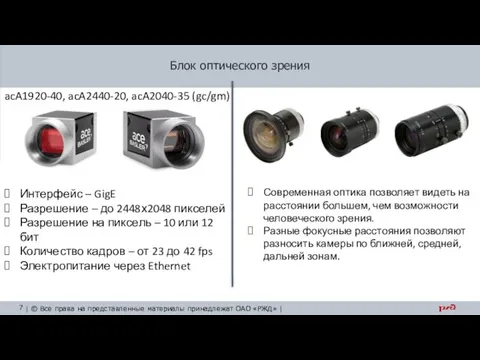
Современная оптика позволяет видеть на расстоянии большем, чем возможности человеческого зрения.
Разные
Современная оптика позволяет видеть на расстоянии большем, чем возможности человеческого зрения.
Разные

Исходный вид с камеры
Вид с увеличением масштаба
Исходный вид с камеры
Вид с увеличением масштаба
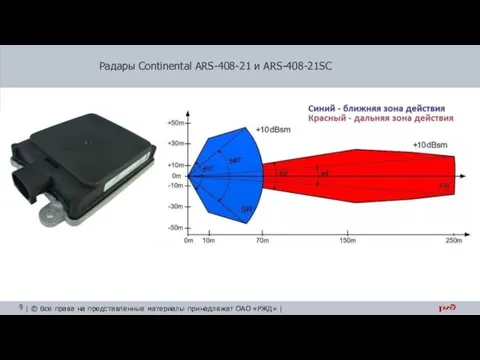
Радары Continental ARS-408-21 и ARS-408-21SC
Радары Continental ARS-408-21 и ARS-408-21SC
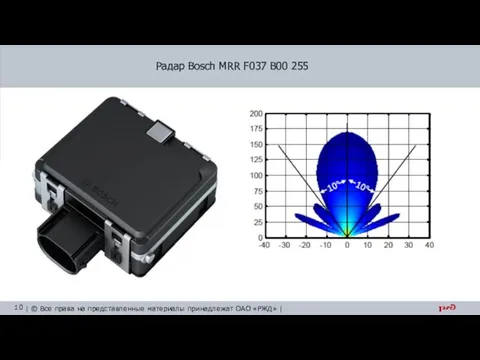
Радар Bosch MRR F037 B00 255
Радар Bosch MRR F037 B00
Радар Bosch MRR F037 B00 255
Радар Bosch MRR F037 B00

Лидар IBEO SCALA B2
Лидар IBEO SCALA B2
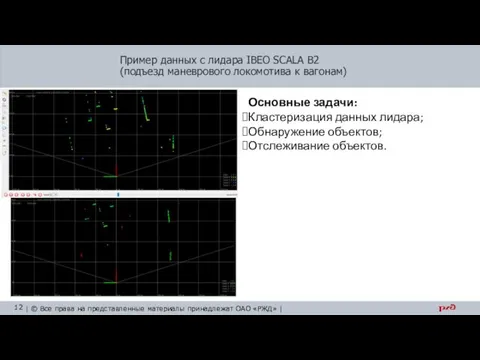
Пример данных с лидара IBEO SCALA B2 (подъезд маневрового локомотива к
Пример данных с лидара IBEO SCALA B2 (подъезд маневрового локомотива к

Наложение данных лидара на видеоизображение
Наложение данных лидара на видеоизображение

NVIDIA
QUALCOMM
DRIVE PX 2
ОСНОВНЫЕ ПЛАТФОРМЫ ДЛЯ АВТОНОМНОГО ДВИЖЕНИЯ
INTEL GO
(ПЛАТФОРМА 5G)
https://www.forbes.com/sites/moorinsights/2017/01/23/chipmakers-get-serious-about-autonomous-driving-at-ces-2017/#55415cfd18ba
NVIDIA
QUALCOMM
DRIVE PX 2
ОСНОВНЫЕ ПЛАТФОРМЫ ДЛЯ АВТОНОМНОГО ДВИЖЕНИЯ
INTEL GO
(ПЛАТФОРМА 5G)
https://www.forbes.com/sites/moorinsights/2017/01/23/chipmakers-get-serious-about-autonomous-driving-at-ces-2017/#55415cfd18ba
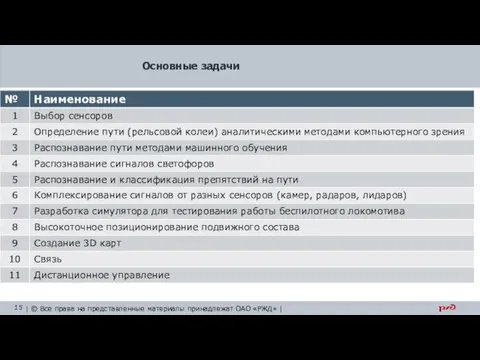
Основные задачи
Основные задачи

Выбор сенсоров
Основные задачи:
Мониторинг рынка и анализ новых разработок, участие в конференциях;
Формирование
Выбор сенсоров
Основные задачи:
Мониторинг рынка и анализ новых разработок, участие в конференциях;
Формирование
концерн радиостроения «Вега»;
Томский государственный университет систем управления и радиоэлектроники;
Московский государственный технический
концерн радиостроения «Вега»;
Томский государственный университет систем управления и радиоэлектроники;
Московский государственный технический
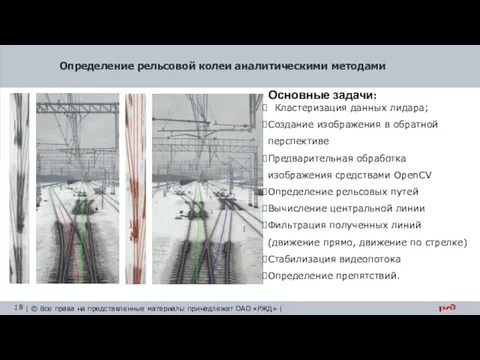
Определение рельсовой колеи аналитическими методами
Основные задачи:
Кластеризация данных лидара;
Создание изображения в
Определение рельсовой колеи аналитическими методами
Основные задачи:
Кластеризация данных лидара;
Создание изображения в
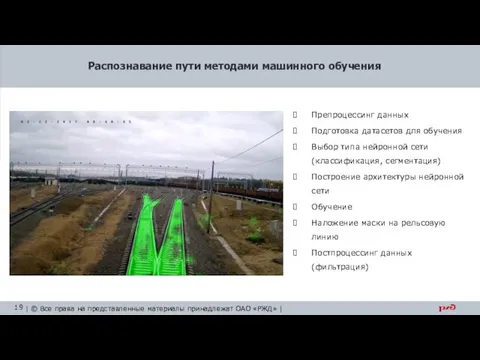
Распознавание пути методами машинного обучения
Препроцессинг данных
Подготовка датасетов для обучения
Выбор типа нейронной
Распознавание пути методами машинного обучения
Препроцессинг данных
Подготовка датасетов для обучения
Выбор типа нейронной
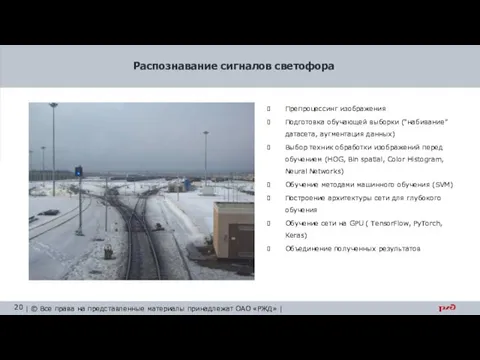
Распознавание сигналов светофора
Препроцессинг изображения
Подготовка обучающей выборки (“набивание” датасета, аугментация данных)
Выбор
Распознавание сигналов светофора
Препроцессинг изображения
Подготовка обучающей выборки (“набивание” датасета, аугментация данных)
Выбор
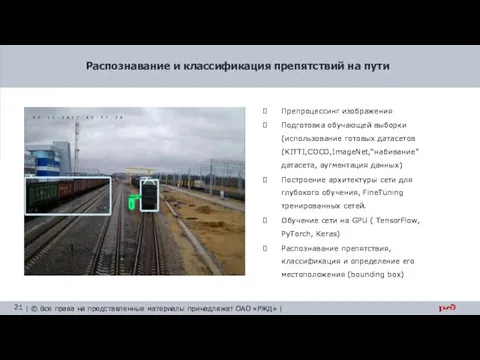
Распознавание и классификация препятствий на пути
Препроцессинг изображения
Подготовка обучающей выборки (использование готовых
Распознавание и классификация препятствий на пути
Препроцессинг изображения
Подготовка обучающей выборки (использование готовых
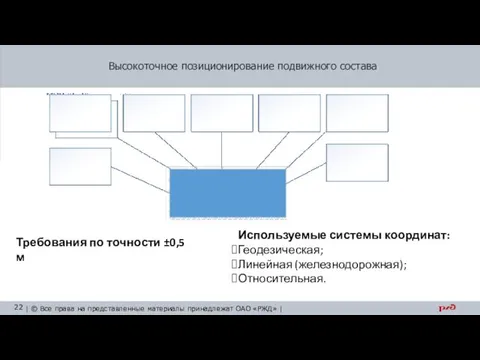
Высокоточное позиционирование подвижного состава
Требования по точности ±0,5 м
Используемые системы координат:
Геодезическая;
Линейная (железнодорожная);
Относительная.
Высокоточное позиционирование подвижного состава
Требования по точности ±0,5 м
Используемые системы координат:
Геодезическая;
Линейная (железнодорожная);
Относительная.
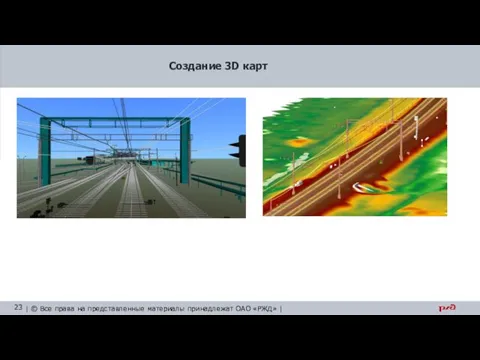
Создание 3D карт
Создание 3D карт

Архитектура сети связи
На борт поезда
Разрешенная дистанция
для проследования
Профиль скорости
Профиль
Архитектура сети связи
На борт поезда
Разрешенная дистанция
для проследования
Профиль скорости
Профиль
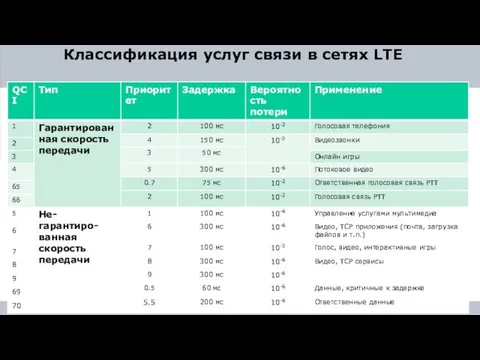
Классификация услуг связи в сетях LTE
Классификация услуг связи в сетях LTE
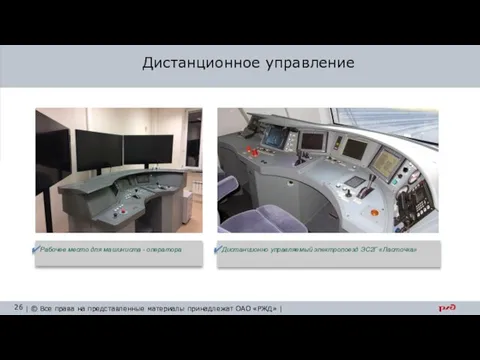
Дистанционное управление
Рабочее место для машиниста - оператора
Дистанционно управляемый электропоезд ЭС2Г «Ласточка»
Дистанционное управление
Рабочее место для машиниста - оператора
Дистанционно управляемый электропоезд ЭС2Г «Ласточка»
 20150126_podgotovka_k_ekzamenam_
20150126_podgotovka_k_ekzamenam_ Улучшение геометрии рычагов задней подвески LB1A
Улучшение геометрии рычагов задней подвески LB1A Деятельность, перспективы развития крупнейших компании мировой нефтепереработки
Деятельность, перспективы развития крупнейших компании мировой нефтепереработки Виды кокеток
Виды кокеток les vacances
les vacances Безопасность в гололёд.
Безопасность в гололёд. Электроника және робот техникасы кафедрасы Дипломдық жұмыс
Электроника және робот техникасы кафедрасы Дипломдық жұмыс Система оповещения личного состава и гражданского населения военного городка
Система оповещения личного состава и гражданского населения военного городка Роль декоративного искусства в жизни человека и общества (Обобщение темы)
Роль декоративного искусства в жизни человека и общества (Обобщение темы) Программная обработка данных на компьютере
Программная обработка данных на компьютере Однодневный поход отработка темы Организация питания в походе
Однодневный поход отработка темы Организация питания в походе 88-й рейс НИС Академик Мстислав Келдыш
88-й рейс НИС Академик Мстислав Келдыш Проект Лесной патруль
Проект Лесной патруль Формати команд МП х86
Формати команд МП х86 8 марта
8 марта Урок №3 Міфи
Урок №3 Міфи Люди, без которых не представляю свою жизнь
Люди, без которых не представляю свою жизнь Материалы для дистанционной поддержки учащихся по дополнительной программе
Материалы для дистанционной поддержки учащихся по дополнительной программе Юный инспектор дорожного движения
Юный инспектор дорожного движения План ФХД, Государственное задание
План ФХД, Государственное задание Развитие зрительно-пространственных представлений
Развитие зрительно-пространственных представлений Мои увлечения
Мои увлечения Большепролетные и пространственные покрытия
Большепролетные и пространственные покрытия C3РО, кибернетика
C3РО, кибернетика Поздравление для мамы
Поздравление для мамы 19 ноября- Международный день отказа от курения
19 ноября- Международный день отказа от курения Рождение иконы
Рождение иконы Диаграммы к КП
Диаграммы к КП