- Введение в робототехнику

Содержание
- 2. Появление слов робот и робототехника Айзек Азимов (Isaac Assimov) в романе «Хоровод» (Runaround, 1942) Карел Чапек
- 3. Эволюция Роботов Архит Тарентский (428-347 до н.э.) спроектировал первую летающую машину – деревянную птицу
- 4. Эволюция роботов Ктесибий Александрийский (285-222 г.г. до н.э.) Создал в 250 году до н.э. водяные часы
- 5. Эволюция роботов «Робот Леонардо» - человекоподобный механизм, технология которого была разработана Леонардо да Винчи приблизительно в1495
- 6. Эволюция роботов Паровой человек
- 7. Эволюция роботов Никола Тесла в 1898 году продемонстрировал возможность дистанционного управления устройствами при помощи сконструированной им
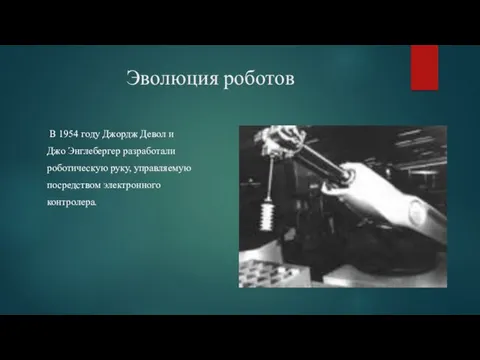
- 8. Эволюция роботов В 1954 году Джордж Девол и Джо Энглебергер разработали роботическую руку, управляемую посредством электронного
- 9. Эволюция роботов Современные роботы
- 10. Категории роботов Андроид (человекообразный робот)
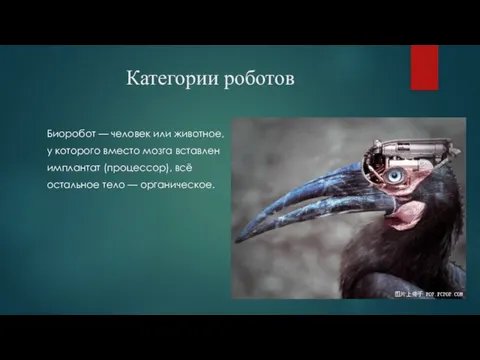
- 11. Категории роботов Биоробот — человек или животное, у которого вместо мозга вставлен имплантат (процессор), всё остальное
- 12. Категории роботов Промышленный робот Манипулятор
- 13. Категории роботов Бытовой робот
- 14. Категории роботов Боевой робот
- 15. Категории роботов Медицинские роботы
- 16. Категории роботов Шаробо́т — подвижный робот, использующий для передвижения единственное сферическое колесо (т.е. шар), и постоянно
- 17. Категории роботов Летающий робот
- 18. Категории роботов Шагающий робот
- 19. Категории роботов Ползающий робот
- 20. О Курсе Что будем изучать Как будем изучать Соревнования (виды) Обзор конструкторов
- 21. Обзор конструкторов Конструктор «ШКОЛЬНИК»
- 22. Обзор конструкторов Конструктор Tetrix
- 23. Обзор конструкторов На базе контроллеров Arduino
- 24. Обзор конструкторов LEGO Mindstorms EV3
- 25. Примеры роботов на базе набора LEGO Mindstorms EV3
- 26. Состав набора Lego Mindstorms и предназначение различных видов деталей
- 29. Балки Предназначение: Балки исполняют роль каркаса (скелета вашего робота).
- 30. Оси Детали, имеющие крестообразное сечение, называются осями (иногда штифтами) и служат для передачи вращения от моторов
- 31. Пины Детали, похожие на цилиндры (имеющие в сечении окружность) называются пинами (от англ. pin - шпилька)
- 32. Коннекторы Их главная задача - соединение балок в различных плоскостях, изменение угла соединения деталей и подсоединение
- 33. Шестерни Шестерни предназначены для передачи вращения от моторов к другим элементам конструкции робота. Как правило, это
- 34. Колеса Движение в пространстве нашему роботу обеспечивают различные колеса и гусеницы, представленные в наборе
- 35. Декор Следующая группа деталей несет в себе декоративные функции
- 37. Скачать презентацию
Появление слов робот и робототехника
Айзек Азимов (Isaac Assimov) в романе «Хоровод»
Появление слов робот и робототехника
Айзек Азимов (Isaac Assimov) в романе «Хоровод»
Эволюция Роботов
Архит Тарентский (428-347 до н.э.)
спроектировал первую
летающую машину –
Эволюция Роботов
Архит Тарентский (428-347 до н.э.)
спроектировал первую
летающую машину –

Эволюция роботов
Ктесибий Александрийский
(285-222 г.г. до н.э.)
Создал в 250 году
Эволюция роботов
Ктесибий Александрийский
(285-222 г.г. до н.э.)
Создал в 250 году

Эволюция роботов
«Робот Леонардо» -
человекоподобный механизм,
технология которого была
разработана Леонардо да Винчи
приблизительно в1495
Эволюция роботов
«Робот Леонардо» -
человекоподобный механизм,
технология которого была
разработана Леонардо да Винчи
приблизительно в1495
Эволюция роботов
Паровой человек
Эволюция роботов
Паровой человек
Эволюция роботов
Никола Тесла в 1898 году
продемонстрировал возможность
дистанционного управления
устройствами при
Эволюция роботов
Никола Тесла в 1898 году
продемонстрировал возможность
дистанционного управления
устройствами при
Эволюция роботов
В 1954 году Джордж Девол и
Джо Энглебергер разработали
Эволюция роботов
В 1954 году Джордж Девол и
Джо Энглебергер разработали

Эволюция роботов
Современные роботы
Эволюция роботов
Современные роботы

Категории роботов
Андроид (человекообразный робот)
Категории роботов
Андроид (человекообразный робот)
Категории роботов
Биоробот — человек или животное,
у которого вместо мозга вставлен
имплантат
Категории роботов
Биоробот — человек или животное,
у которого вместо мозга вставлен
имплантат

Категории роботов
Промышленный робот
Манипулятор
Категории роботов
Промышленный робот
Манипулятор

Категории роботов
Бытовой робот
Категории роботов
Бытовой робот

Категории роботов
Боевой робот
Категории роботов
Боевой робот

Категории роботов
Медицинские роботы
Категории роботов
Медицинские роботы

Категории роботов
Шаробо́т — подвижный робот,
использующий для передвижения
единственное сферическое колесо
(т.е. шар), и
Категории роботов
Шаробо́т — подвижный робот,
использующий для передвижения
единственное сферическое колесо
(т.е. шар), и
Категории роботов
Летающий робот
Категории роботов
Летающий робот

Категории роботов
Шагающий робот
Категории роботов
Шагающий робот

Категории роботов
Ползающий робот
Категории роботов
Ползающий робот
О Курсе
Что будем изучать
Как будем изучать
Соревнования (виды)
Обзор конструкторов
О Курсе
Что будем изучать
Как будем изучать
Соревнования (виды)
Обзор конструкторов

Обзор конструкторов
Конструктор
«ШКОЛЬНИК»
Обзор конструкторов
Конструктор
«ШКОЛЬНИК»

Обзор конструкторов
Конструктор Tetrix
Обзор конструкторов
Конструктор Tetrix

Обзор конструкторов
На базе контроллеров
Arduino
Обзор конструкторов
На базе контроллеров
Arduino

Обзор конструкторов
LEGO Mindstorms EV3
Обзор конструкторов
LEGO Mindstorms EV3

Примеры роботов на базе набора
LEGO Mindstorms EV3
Примеры роботов на базе набора
LEGO Mindstorms EV3

Состав набора Lego Mindstorms и предназначение различных видов деталей
Состав набора Lego Mindstorms и предназначение различных видов деталей



Балки
Предназначение: Балки
исполняют роль каркаса
(скелета вашего робота).
Балки
Предназначение: Балки
исполняют роль каркаса
(скелета вашего робота).
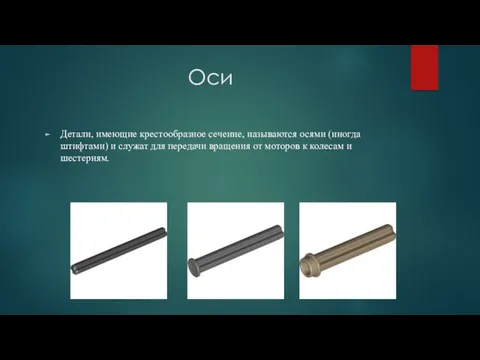
Оси
Детали, имеющие крестообразное сечение, называются осями (иногда штифтами) и служат для
Оси
Детали, имеющие крестообразное сечение, называются осями (иногда штифтами) и служат для

Пины
Детали, похожие на цилиндры (имеющие в сечении окружность) называются пинами (от
Пины
Детали, похожие на цилиндры (имеющие в сечении окружность) называются пинами (от
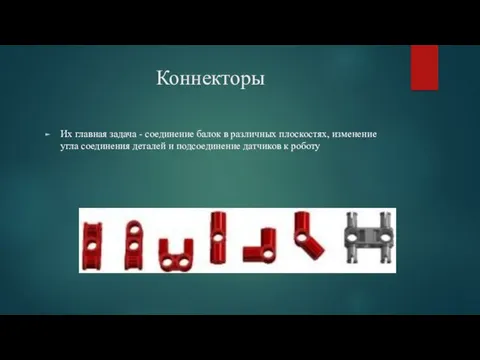
Коннекторы
Их главная задача - соединение балок в различных плоскостях, изменение угла
Коннекторы
Их главная задача - соединение балок в различных плоскостях, изменение угла

Шестерни
Шестерни предназначены для передачи вращения от моторов к другим элементам конструкции
Шестерни
Шестерни предназначены для передачи вращения от моторов к другим элементам конструкции

Колеса
Движение в пространстве нашему роботу обеспечивают различные колеса и гусеницы,
Колеса
Движение в пространстве нашему роботу обеспечивают различные колеса и гусеницы,

Декор
Следующая группа деталей несет в себе декоративные функции
Декор
Следующая группа деталей несет в себе декоративные функции
 Влажно - тепловая обработка швейных изделий
Влажно - тепловая обработка швейных изделий Исследование скважин и пластов
Исследование скважин и пластов Безопасный локомотивный объединенный комплекс БЛОК-М. Алгоритм работы
Безопасный локомотивный объединенный комплекс БЛОК-М. Алгоритм работы Ночь искусств 2020
Ночь искусств 2020 Великие православные праздники (викторина)
Великие православные праздники (викторина)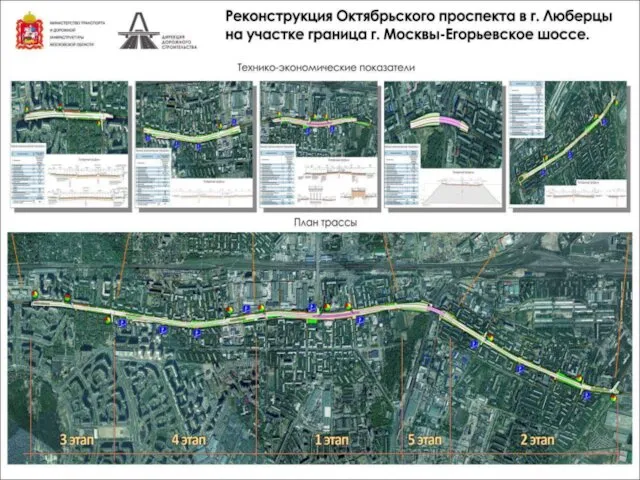 Реконструкция Октябрьского проспекта в г. Люберцы
Реконструкция Октябрьского проспекта в г. Люберцы Лето 789 года от рождества Христова
Лето 789 года от рождества Христова Теплоизолированные трубы Uponor Ecoflex
Теплоизолированные трубы Uponor Ecoflex Анализ и моделирование процессов самоорганизации для автоматизированного управления нефтегазодобычей
Анализ и моделирование процессов самоорганизации для автоматизированного управления нефтегазодобычей Грузовичкоф XXL
Грузовичкоф XXL Сварочное производство и металлообработка
Сварочное производство и металлообработка Litania o nadziei
Litania o nadziei Автоматизированные блочно-комплектные установки на базе ветросолнечных модулей с газопоршневой электростанцией
Автоматизированные блочно-комплектные установки на базе ветросолнечных модулей с газопоршневой электростанцией Въезды транспортных средств в станции метро
Въезды транспортных средств в станции метро Ислам (подготовка к тесту)
Ислам (подготовка к тесту) Чудеса света
Чудеса света Документы, регламентирующие работу железнодорожной станции
Документы, регламентирующие работу железнодорожной станции Общие вопросы неразрушающего контроля
Общие вопросы неразрушающего контроля Производство ремонтно-строительных работ. Ремонт фундаментов, стен и перегородок зданий. (Тема 2.2)
Производство ремонтно-строительных работ. Ремонт фундаментов, стен и перегородок зданий. (Тема 2.2) Другие логические элементы. Определения
Другие логические элементы. Определения
 Науки о человеке. Становление наук о человеке-4
Науки о человеке. Становление наук о человеке-4 Lektsia_1_Kharakteristiki_standartov_IB
Lektsia_1_Kharakteristiki_standartov_IB Гимн Аллилуйя
Гимн Аллилуйя Несопровождаемые дети
Несопровождаемые дети Электроэнергетическая система (глава 1)
Электроэнергетическая система (глава 1) Сергиев Посад
Сергиев Посад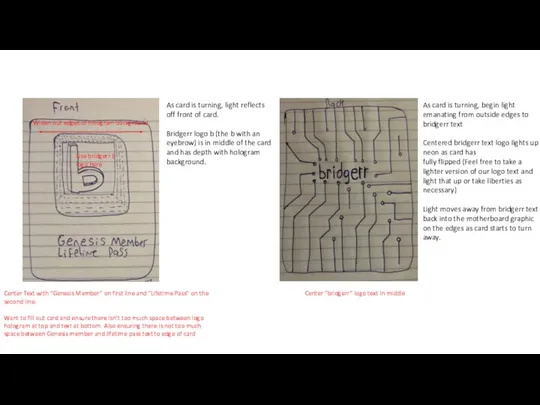 NFT Pass Front and Back
NFT Pass Front and Back