- Автоматты реттеу заңдары

Содержание
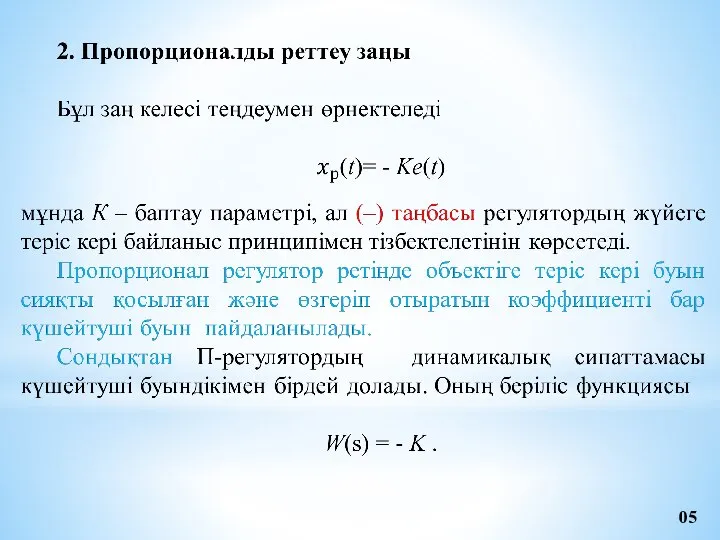
- 2. Басқарылатын шаманың берілген және нақты мәндерінің айырмасын қабылдай отырып атқарушы органга берілген заңдылықпен басқару ықпалын жасайтын
- 3. 1. Позициялы (релелі) регулятордың сигналы реттеуші органды берілген позицияға немесе орынға жылжытады. Мұндай позициялар екіден аз
- 4. 2а шамасы екі позициялы регулятордың бір мағаналы емес зонасы (1, б суреті). Кіріс x шамасы (өзі
- 5. Үш позициялы регуляторларда (1, б суреті) екі позициялы регуляторларға қарағанда екі тұрақты «көбірек» В1 және «азырақ»
- 6. 05
- 7. Передаточной функцией объекта называется отношение преобразованного по Лапласу выхода объекта у(p) к преобразованному по Лапласу входу
- 8. П-регуляторімен кез келген тұрақты объектіні басқаруға болады. Бірақ онда өтпелі процесс баяу өтеді. Сатикалық қате нөлге
- 9. 03
- 10. 04
- 11. 05
- 12. 06
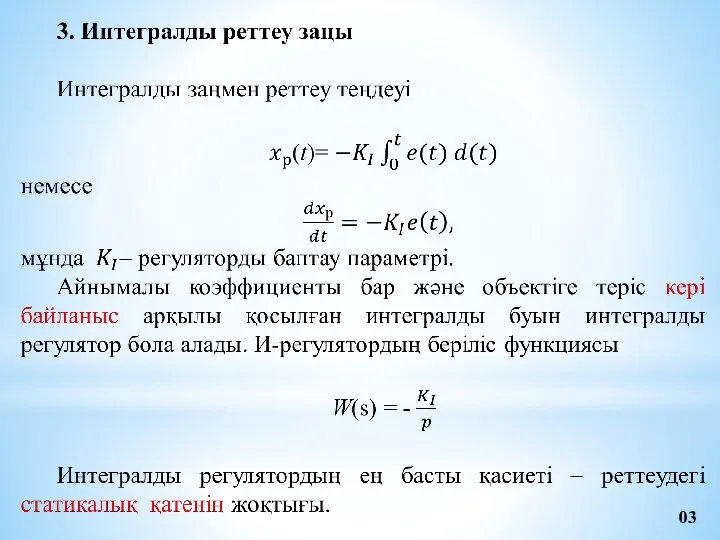
- 13. Дифференциалды регулятор реттелетін шаманың абсолютті мәні емес оның өзгеру жылдамдығына әсер ететін болғандықтан оны тек күрделі
- 14. 08
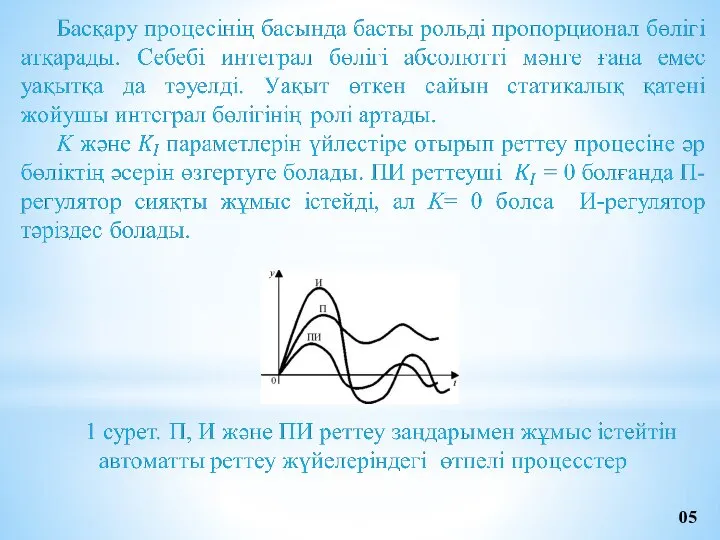
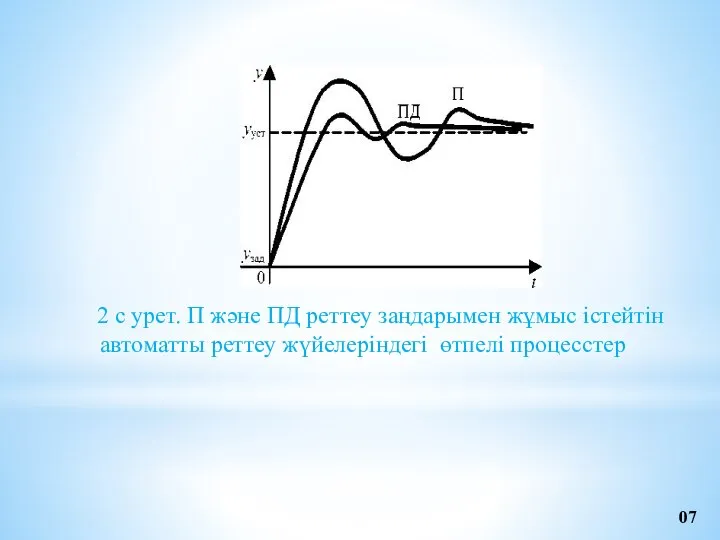
- 15. 2 с урет. П және ПД реттеу заңдарымен жұмыс істейтін автоматты реттеу жүйелеріндегі өтпелі процесстер 07
- 16. 09
- 18. Скачать презентацию
Басқарылатын шаманың берілген және нақты мәндерінің айырмасын қабылдай отырып атқарушы органга
Басқарылатын шаманың берілген және нақты мәндерінің айырмасын қабылдай отырып атқарушы органга
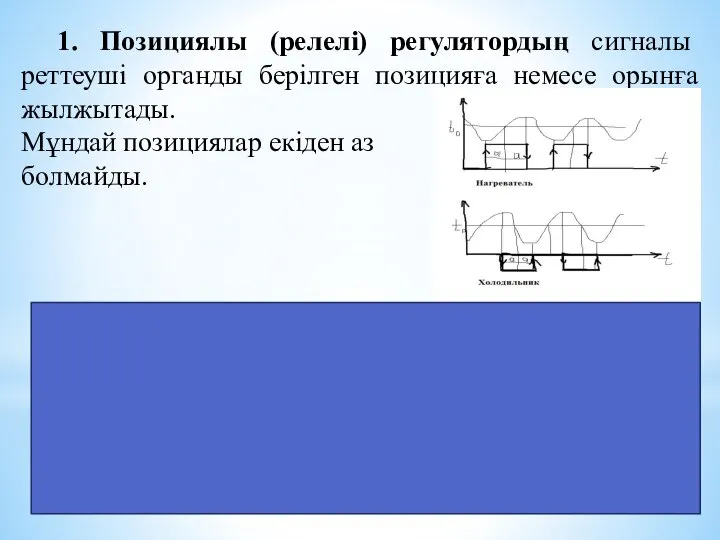
1. Позициялы (релелі) регулятордың сигналы реттеуші органды берілген позицияға немесе орынға
1. Позициялы (релелі) регулятордың сигналы реттеуші органды берілген позицияға немесе орынға
2а шамасы екі позициялы регулятордың бір мағаналы емес зонасы (1, б
2а шамасы екі позициялы регулятордың бір мағаналы емес зонасы (1, б
Үш позициялы регуляторларда (1, б суреті) екі позициялы регуляторларға қарағанда екі
Үш позициялы регуляторларда (1, б суреті) екі позициялы регуляторларға қарағанда екі
05
05
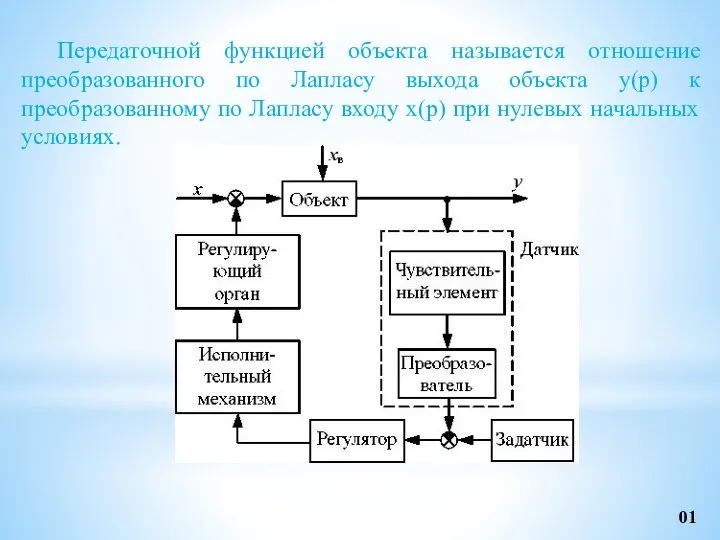
Передаточной функцией объекта называется отношение преобразованного по Лапласу выхода объекта у(p)
Передаточной функцией объекта называется отношение преобразованного по Лапласу выхода объекта у(p)
П-регуляторімен кез келген тұрақты объектіні басқаруға болады.
Бірақ онда өтпелі процесс
П-регуляторімен кез келген тұрақты объектіні басқаруға болады.
Бірақ онда өтпелі процесс
03
03
04
04
05
05
06
06
Дифференциалды регулятор реттелетін шаманың абсолютті мәні емес оның өзгеру жылдамдығына әсер
Дифференциалды регулятор реттелетін шаманың абсолютті мәні емес оның өзгеру жылдамдығына әсер
08
08
2 с урет. П және ПД реттеу заңдарымен жұмыс істейтін автоматты
2 с урет. П және ПД реттеу заңдарымен жұмыс істейтін автоматты
09
09
 АРХИТЕКТУРА СРЕДНИХ ВЕКОВ
АРХИТЕКТУРА СРЕДНИХ ВЕКОВ 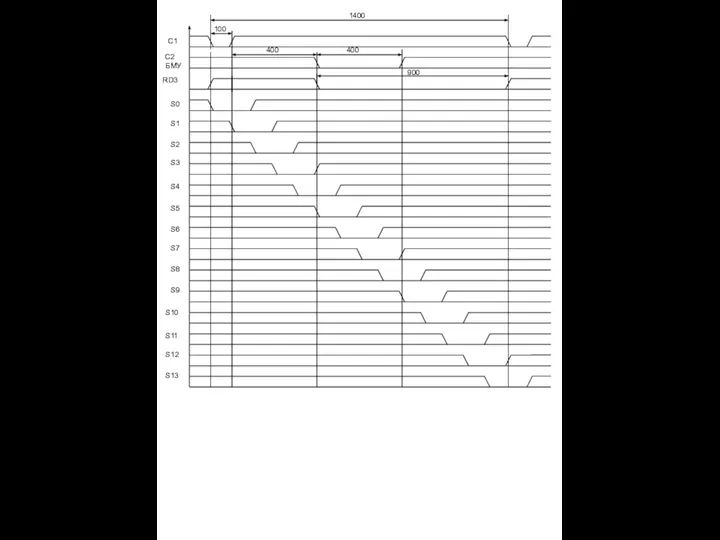 Временная
Временная  Презентация Порядок рассмотрения сообщений о преступлениях
Презентация Порядок рассмотрения сообщений о преступлениях Культура Руси XIV-XVI вв
Культура Руси XIV-XVI вв Повірка електронно-лічильних частотомірів (тема 4, заняття 2)
Повірка електронно-лічильних частотомірів (тема 4, заняття 2) Салауатты өмір салтын қалыптастыру
Салауатты өмір салтын қалыптастыру Знай город Санкт-Петербург
Знай город Санкт-Петербург Основные термины гимнастических упражнений
Основные термины гимнастических упражнений Разработка программного решения в пакете Excel для проектного планирования в форме диаграмм Ганта
Разработка программного решения в пакете Excel для проектного планирования в форме диаграмм Ганта Урок окружающего мира «ОДЕЖДА СЛАВЯН»
Урок окружающего мира «ОДЕЖДА СЛАВЯН» Порядок работы командира по организации боя
Порядок работы командира по организации боя Студенческий спортивный клуб
Студенческий спортивный клуб Презентация Политическая система общества
Презентация Политическая система общества Психология спорта в России. Актуальные проблемы и тенденции
Психология спорта в России. Актуальные проблемы и тенденции Химические вещества, улучшающие качество нефти
Химические вещества, улучшающие качество нефти «Деньги любят счет, или элементы финансовой математики (проценты, кредиты, вклады)» Выполнила учащаяся 10 класса Чаплыгина О.С. Ру
«Деньги любят счет, или элементы финансовой математики (проценты, кредиты, вклады)» Выполнила учащаяся 10 класса Чаплыгина О.С. Ру Коллектив , его признаки и структура Подготовили студенты Казьмин Георгий и Трунин Сергей Ю - 103
Коллектив , его признаки и структура Подготовили студенты Казьмин Георгий и Трунин Сергей Ю - 103 Foreign Direct Investment
Foreign Direct Investment  Изменение в порядке ведения воинского учета, согласно Федерального Закона № 8-ФЗ от 6 февраля 2019 года
Изменение в порядке ведения воинского учета, согласно Федерального Закона № 8-ФЗ от 6 февраля 2019 года Organization and Functioning of a catering facility
Organization and Functioning of a catering facility Студенческая стройка «Северное сияние»
Студенческая стройка «Северное сияние» Основы делопроизводства
Основы делопроизводства Сварные соединения
Сварные соединения Покупайте и коллекционируйте картины студентов лучших художественных ВУЗов по фиксированной цене
Покупайте и коллекционируйте картины студентов лучших художественных ВУЗов по фиксированной цене Хостел ООО “Незнакомцы”
Хостел ООО “Незнакомцы” ПРЕЗЕНТАЦИЯ ПО ТЕМЕ «Африканская степь - саванна» Учебник для 3 класса «Окружающий мир», Дмитриева Н.Я., Казаков А.Н. Составите
ПРЕЗЕНТАЦИЯ ПО ТЕМЕ «Африканская степь - саванна» Учебник для 3 класса «Окружающий мир», Дмитриева Н.Я., Казаков А.Н. Составите Pascal ABC. Работа с числовыми данными. Целые числа. Урок 3-4
Pascal ABC. Работа с числовыми данными. Целые числа. Урок 3-4 Слава вам, братья, славян просветители
Слава вам, братья, славян просветители