- Численные методы оптимизации

Содержание
- 2. Методы прямого поиска В типичном методе поиска направления минимизации полностью определяются на основании последовательных вычислений целевой
- 3. Методы прямого поиска Методы поиска не требуют регулярности и непрерывности целевой функции и существования производных. Голоморфная
- 4. Методы прямого поиска Вторым обстоятельством, правда, связанным с предыдущей проблемой, является то, что при использовании методов
- 5. Методы прямого поиска Методы поиска простейшего типа заключаются в изменении каждый раз одной переменной, тогда как
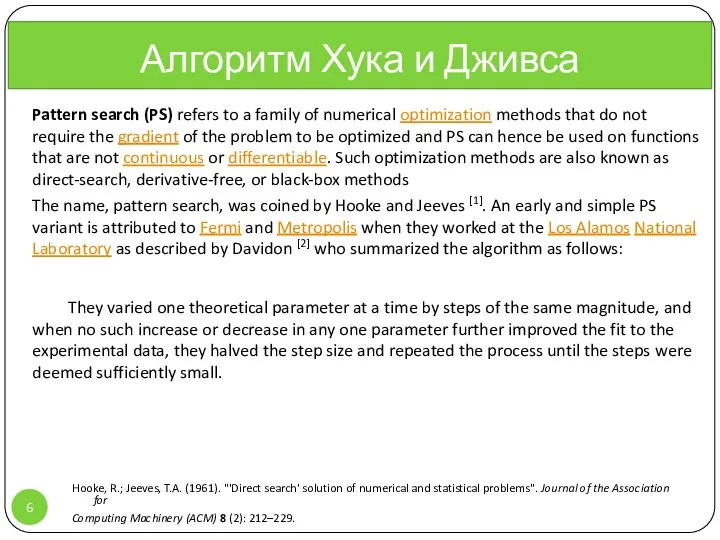
- 6. Hooke, R.; Jeeves, T.A. (1961). "'Direct search' solution of numerical and statistical problems". Journal of the
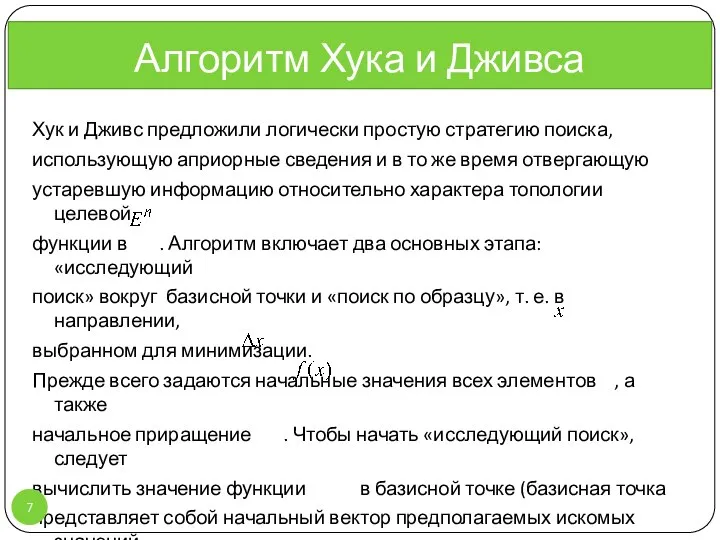
- 7. Алгоритм Хука и Дживса Хук и Дживс предложили логически простую стратегию поиска, использующую априорные сведения и
- 8. Затем в циклическом порядке изменяется каждая переменная (каждый раз только одна) на выбранные величины приращений, пока
- 9. На каждом шаге или сдвиге по независимой переменной значение целевой функции сравнивается с ее значением в
- 10. Длина шага при поиске по образцу в данном координатном направлении приблизительно пропорциональна числу удачных шагов, имевших
- 11. Алгоритм Хука и Дживса Один из алгоритмов минимизации (библиотека МГУ) использует метод Хука - Дживса для
- 12. Assume we are searching for the minimizer of f starting from a given initial point x(0)
- 13. If , then a success is recorded and the starting point is moved in , from
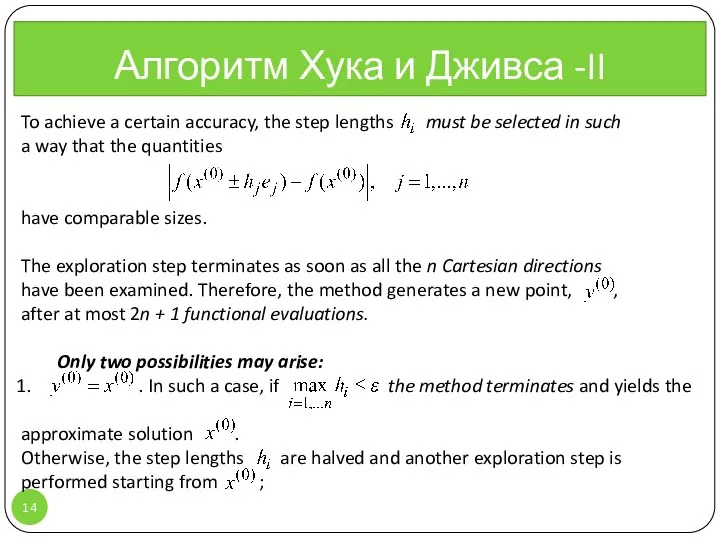
- 14. Алгоритм Хука и Дживса -II , To achieve a certain accuracy, the step lengths must be
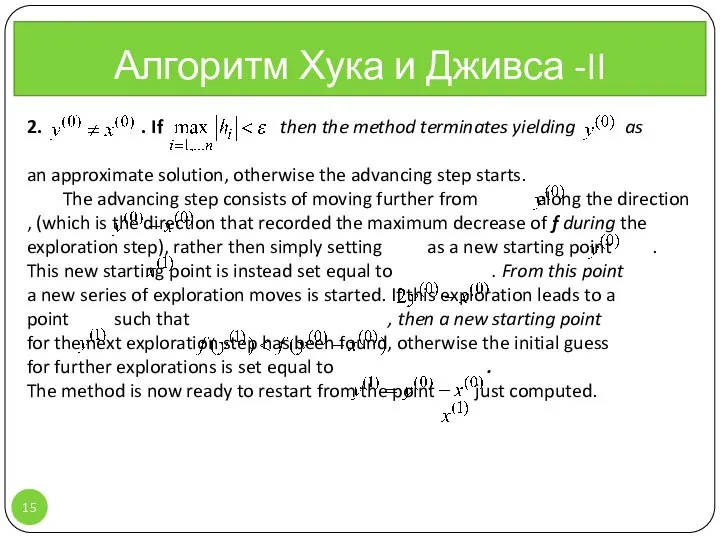
- 15. Алгоритм Хука и Дживса -II , 2. . If then the method terminates yielding as an
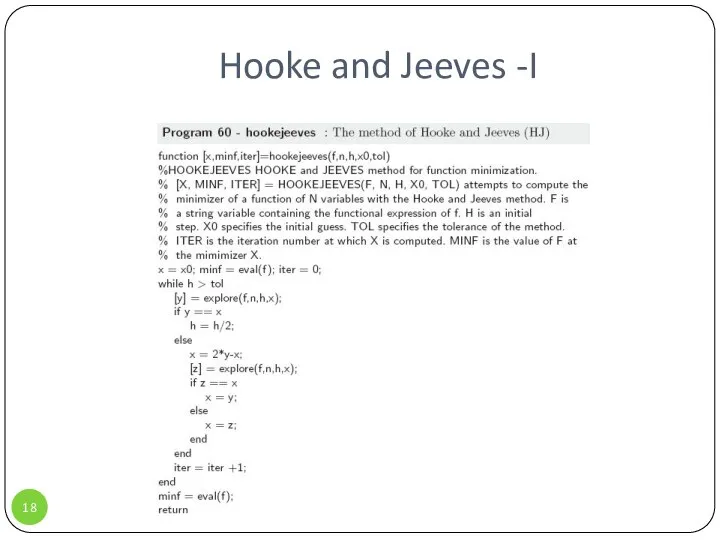
- 16. Алгоритм Хука и Дживса , function [x,minf,iter]=hookejeeves(f,n,h,x0,tol) {HOOKEJEEVES HOOKE and JEEVES method for function minimization. [X,
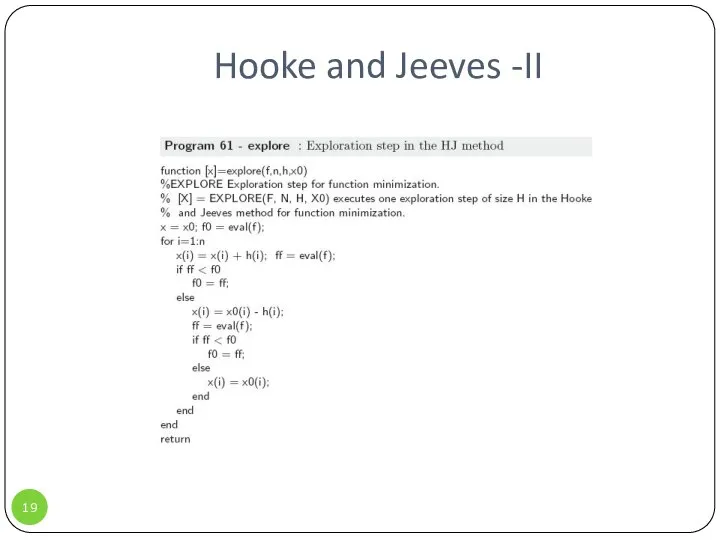
- 17. Алгоритм Хука и Дживса , function [x]=explore(f,n,h,x0) { EXPLORE Exploration step for function minimization. [X] =
- 18. Hooke and Jeeves -I
- 19. Hooke and Jeeves -II
- 20. Example – Tests for Simplex and Hooke and Jeeves methods
- 22. Скачать презентацию
Методы прямого поиска
В типичном методе поиска направления минимизации полностью
определяются на
Методы прямого поиска
В типичном методе поиска направления минимизации полностью
определяются на
Методы прямого поиска
Методы поиска не требуют регулярности и непрерывности целевой
функции
Методы прямого поиска
Методы поиска не требуют регулярности и непрерывности целевой
функции
Методы прямого поиска
Вторым обстоятельством, правда, связанным с предыдущей
проблемой, является то,
Методы прямого поиска
Вторым обстоятельством, правда, связанным с предыдущей
проблемой, является то,
Методы прямого поиска
Методы поиска простейшего типа заключаются в изменении каждый раз
одной
Методы прямого поиска
Методы поиска простейшего типа заключаются в изменении каждый раз
одной
Hooke, R.; Jeeves, T.A. (1961). "'Direct search' solution of numerical and
Hooke, R.; Jeeves, T.A. (1961). "'Direct search' solution of numerical and
Алгоритм Хука и Дживса
Хук и Дживс предложили логически простую стратегию поиска,
Алгоритм Хука и Дживса
Хук и Дживс предложили логически простую стратегию поиска,
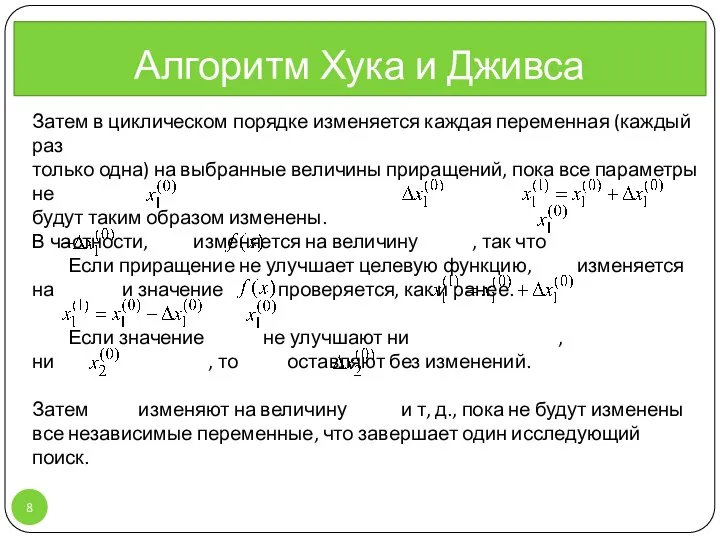
Затем в циклическом порядке изменяется каждая переменная (каждый раз
только одна)
Затем в циклическом порядке изменяется каждая переменная (каждый раз
только одна)
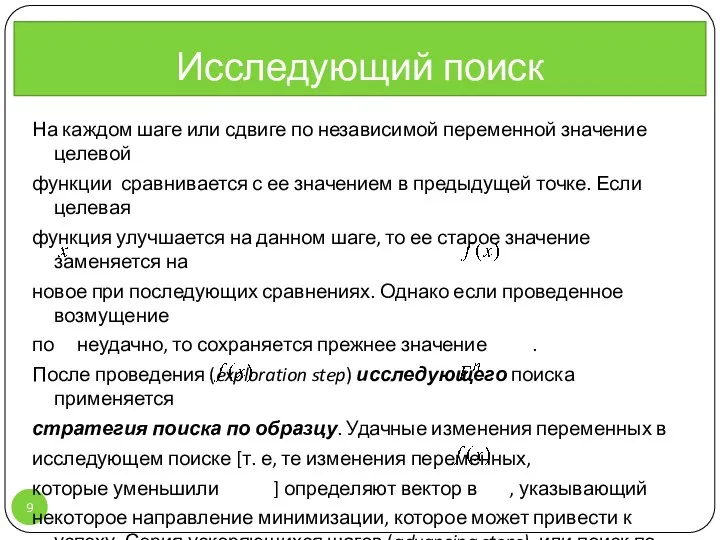
На каждом шаге или сдвиге по независимой переменной значение целевой
функции
На каждом шаге или сдвиге по независимой переменной значение целевой
функции
Длина шага при поиске по образцу в данном координатном направлении
приблизительно
Длина шага при поиске по образцу в данном координатном направлении
приблизительно
Алгоритм Хука и Дживса
Один из алгоритмов минимизации (библиотека МГУ) использует
Алгоритм Хука и Дживса
Один из алгоритмов минимизации (библиотека МГУ) использует
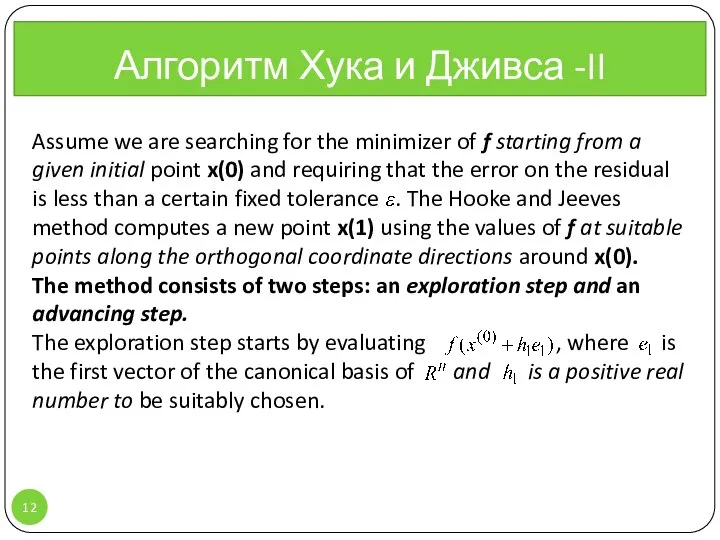
Assume we are searching for the minimizer of f starting from
Assume we are searching for the minimizer of f starting from

If , then a success is recorded and
the starting point is
If , then a success is recorded and
the starting point is
Алгоритм Хука и Дживса -II
,
To achieve a certain accuracy,
Алгоритм Хука и Дживса -II
,
To achieve a certain accuracy,
Алгоритм Хука и Дживса -II
,
2. . If then the
Алгоритм Хука и Дживса -II
,
2. . If then the
![Алгоритм Хука и Дживса , function [x,minf,iter]=hookejeeves(f,n,h,x0,tol) {HOOKEJEEVES HOOKE and JEEVES](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1306729/slide-15.jpg)
Алгоритм Хука и Дживса
,
function [x,minf,iter]=hookejeeves(f,n,h,x0,tol)
{HOOKEJEEVES HOOKE and JEEVES method
Алгоритм Хука и Дживса
,
function [x,minf,iter]=hookejeeves(f,n,h,x0,tol)
{HOOKEJEEVES HOOKE and JEEVES method
![Алгоритм Хука и Дживса , function [x]=explore(f,n,h,x0) { EXPLORE Exploration step](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1306729/slide-16.jpg)
Алгоритм Хука и Дживса
,
function [x]=explore(f,n,h,x0)
{ EXPLORE Exploration step for
Алгоритм Хука и Дживса
,
function [x]=explore(f,n,h,x0)
{ EXPLORE Exploration step for
Hooke and Jeeves -I
Hooke and Jeeves -I
Hooke and Jeeves -II
Hooke and Jeeves -II
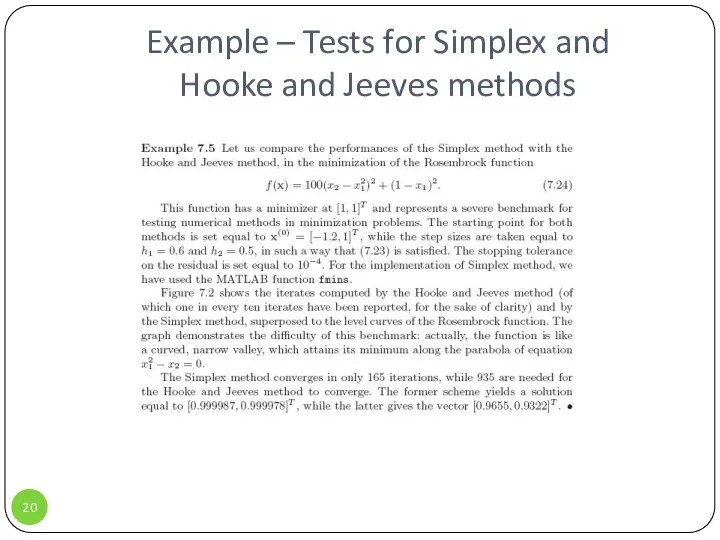
Example – Tests for Simplex and
Hooke and Jeeves methods
Example – Tests for Simplex and
Hooke and Jeeves methods
 МИРОВОЙ ЭКОНОМИЧЕСКИЙ КРИЗИС
МИРОВОЙ ЭКОНОМИЧЕСКИЙ КРИЗИС Развитие вычислительной техники
Развитие вычислительной техники Проектирование классов и взаимодействия
Проектирование классов и взаимодействия Теория пассионарности Л.Н. Гумилева
Теория пассионарности Л.Н. Гумилева Патология белкового и липидного обменов
Патология белкового и липидного обменов ЖИВОТНЫЕ ТРОПИЧЕСКОГО ЛЕСА
ЖИВОТНЫЕ ТРОПИЧЕСКОГО ЛЕСА  Презентация на тему "Роль правового воспитания в профилактике правонарушений школьников" - скачать презентации по Педагогик
Презентация на тему "Роль правового воспитания в профилактике правонарушений школьников" - скачать презентации по Педагогик Создание сети платежных терминалов для Банка Предложение компании «Предпроцессинг» (Predprocessing)
Создание сети платежных терминалов для Банка Предложение компании «Предпроцессинг» (Predprocessing) Особенности судебного разбирательства в суде с участием присяжных заседателей. (Тема 3.3)
Особенности судебного разбирательства в суде с участием присяжных заседателей. (Тема 3.3) Аминокислоты
Аминокислоты Поглощения буровых и тампонажных растворов. Лекция 2
Поглощения буровых и тампонажных растворов. Лекция 2 Открытие нового легкоатлетического манежа в МГСУ
Открытие нового легкоатлетического манежа в МГСУ Аттестация в вопросах и ответах Из Письма Минобрнауки "Разъяснения по применению Порядка аттестации педагогических работ
Аттестация в вопросах и ответах Из Письма Минобрнауки "Разъяснения по применению Порядка аттестации педагогических работ Презентация____
Презентация____ Условия кристаллизации магмы
Условия кристаллизации магмы Модель COSO ERM через призму внутреннего контроля и аудита
Модель COSO ERM через призму внутреннего контроля и аудита L700 download user guide. Flash loader v0.x Lite 7.0.2
L700 download user guide. Flash loader v0.x Lite 7.0.2 Апаратна складова ПК
Апаратна складова ПК Функциональная электроника
Функциональная электроника Словники у професійному мовленні
Словники у професійному мовленні Икона новомучеников и исповедников Российских
Икона новомучеников и исповедников Российских Волинські Вконтакте
Волинські Вконтакте Производство сыра
Производство сыра Презентация на тему "Формы работы классного руководителя с родителями" - скачать презентации по Педагогике
Презентация на тему "Формы работы классного руководителя с родителями" - скачать презентации по Педагогике Общение с миромПрезентация1
Общение с миромПрезентация1 Строительная химия BASF
Строительная химия BASF Политические и правовые взгляды Древнего Китая Работу выполнили Пустовая Анастасия, Мятлик Елена, группа Ю-103
Политические и правовые взгляды Древнего Китая Работу выполнили Пустовая Анастасия, Мятлик Елена, группа Ю-103 Арабский халифат
Арабский халифат