- Что такое мехатроника

Содержание
- 2. Подготовка специалистов по направлениям: Бакалавриат: 150306 «Мехатроника и робототехника» 4 года Магистратура: 150406 «Мехатроника и робототехника»
- 3. Миссия кафедры Подготовка специалистов в условиях интеграции новых отраслей знаний (информационных технологий, электроники, автоматического управления) с
- 4. Лаборатории кафедры: Компьютерный класс информатики и САПР (ауд. 3-410) Лицензионное ПО: MSDNAA (Windows, Visual Studio 2008/2010),
- 5. 4-х координатный обрабатывающий центр с ЧПУ ВМ-501 токарный станок повышенной точности с ЧПУ ИТ-42 прецизионный фрезерно-сверлильный
- 6. Лаборатория электроники и микропроцессорной техники (ауд. 3-5а) Рабочие места монтажника электронных устройств– 6 мест; Рабочее место
- 7. Основные специальные дисциплины Теория и технология программирования ЭВМ и вычислительные сети Методы искусственного интеллекта в мехатронике
- 8. Сотрудничество с предприятиями и трудоустройство выпускников
- 9. Международная аккредитация образовательных программ Европейское приложение к диплому ИжГТУ (Diploma Supplement) Документ дает право на продолжение
- 10. Международное сотрудничество Технические университеты г. Братислава, Зволен, Трнава (Словакия): - участие в конференциях; - научные стажировки
- 11. Международное сотрудничество Участие в зарубежных научно-исследовательских проектах, Лейфана университет, г. Люнебург, Германия Научная стажировка студентов в
- 12. Международное сотрудничество Студенты на летней практике в лабораториях факультета Электротехники и информатики Словацкого технического университета г.
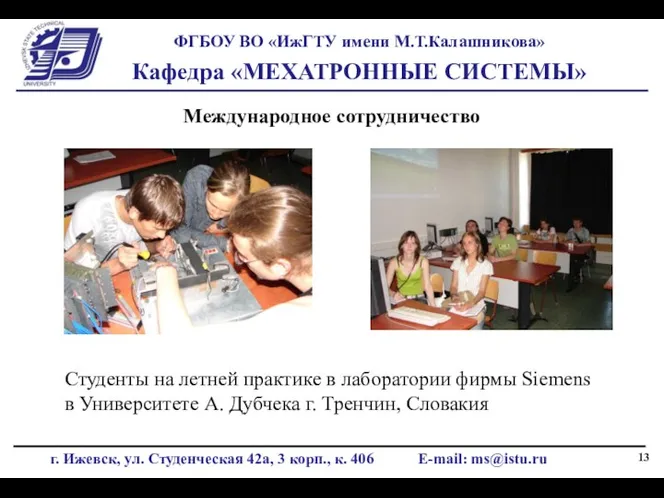
- 13. Международное сотрудничество Студенты на летней практике в лаборатории фирмы Siemens в Университете А. Дубчека г. Тренчин,
- 14. Научно-исследовательская работа студентов Призеры международной выставки «РОБОТЕХНИКА 2007», г.Москва, ВВЦ (ВДНХ) Председатель правительства РФ Фрадков М.Е.,
- 15. Научно-исследовательская работа студентов Участники международного фестиваля им. Проф. Девянина «Мобильные роботы 2008», г. Москва, МГУПИ Высокоманевренный
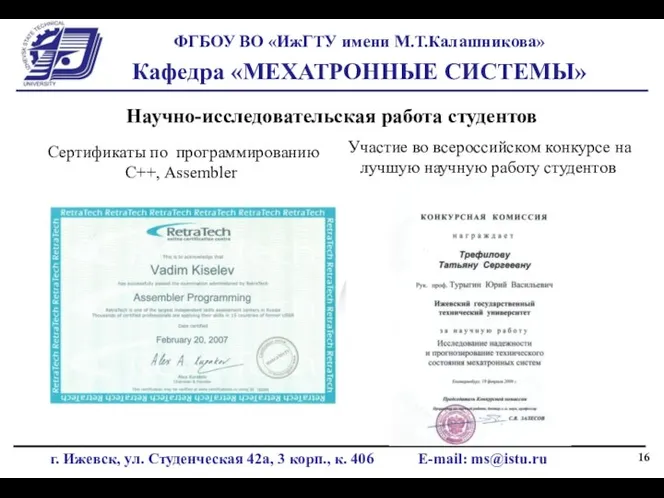
- 16. Научно-исследовательская работа студентов Сертификаты по программированию С++, Assembler Участие во всероссийском конкурсе на лучшую научную работу
- 17. Научно-исследовательская работа студентов В настоящее время студенты работают по следующим направлениям: Разработка модели беспилотного летательного аппарата;
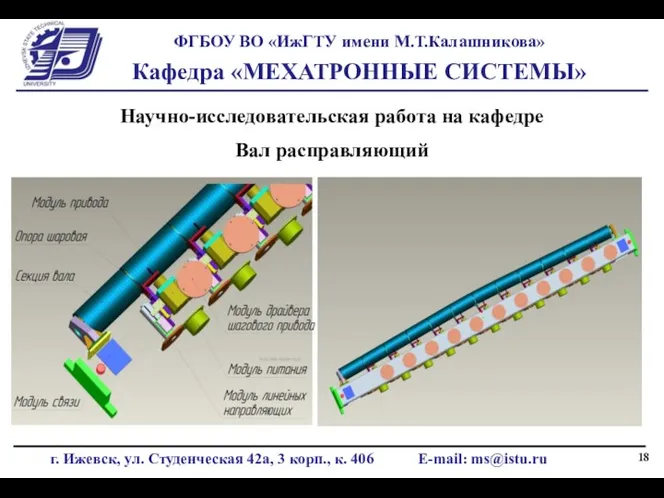
- 18. Научно-исследовательская работа на кафедре Вал расправляющий
- 19. Научно-исследовательская работа на кафедре Вал расправляющий - Балка несущая в сборе с модулями привода - Модуль
- 20. Научно-исследовательская работа на кафедре Алгоритмы распознавания и управления Выделение особенностей изображения с камеры Выделение искомого объекта
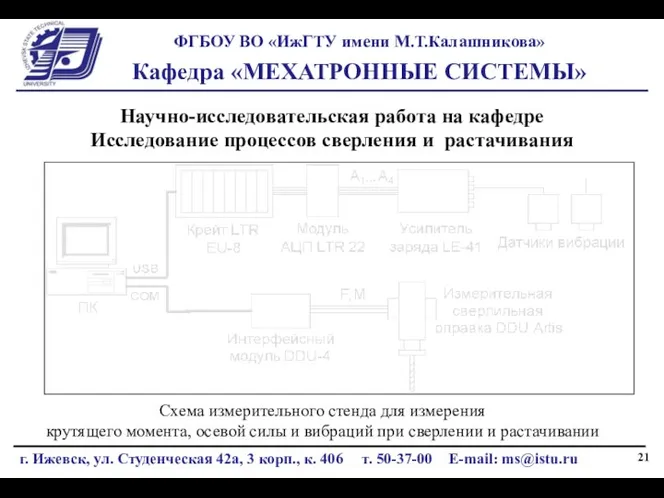
- 21. Научно-исследовательская работа на кафедре Исследование процессов сверления и растачивания Схема измерительного стенда для измерения крутящего момента,
- 22. Научно-исследовательская работа на кафедре Исследование процессов сверления и растачивания Стенд для измерения крутящего момента, осевой силы
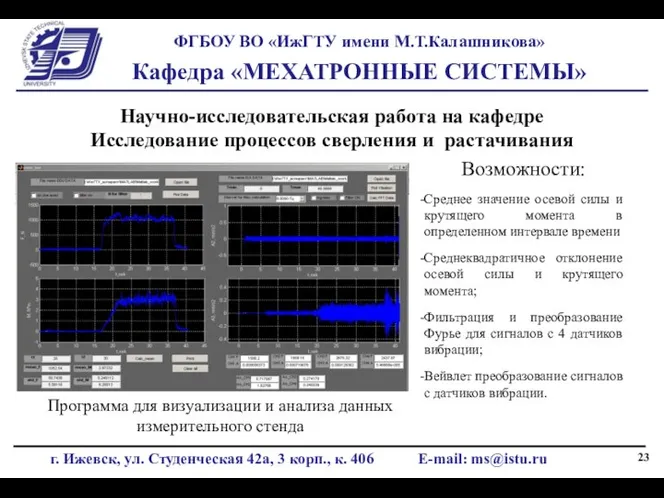
- 23. Научно-исследовательская работа на кафедре Исследование процессов сверления и растачивания Программа для визуализации и анализа данных измерительного
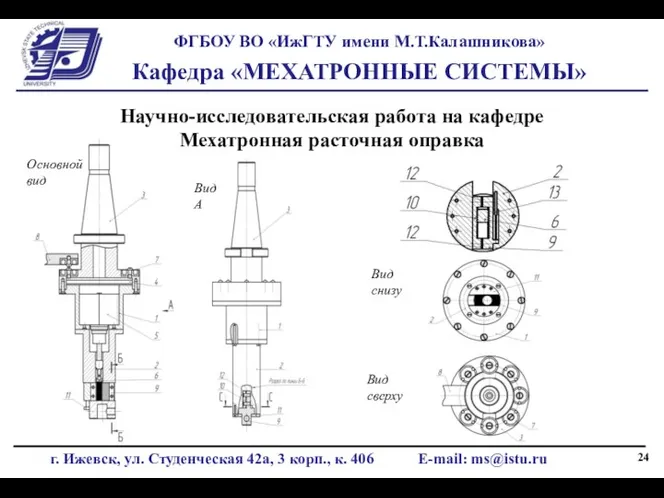
- 24. Научно-исследовательская работа на кафедре Мехатронная расточная оправка Основной вид Вид А Вид снизу Вид сверху
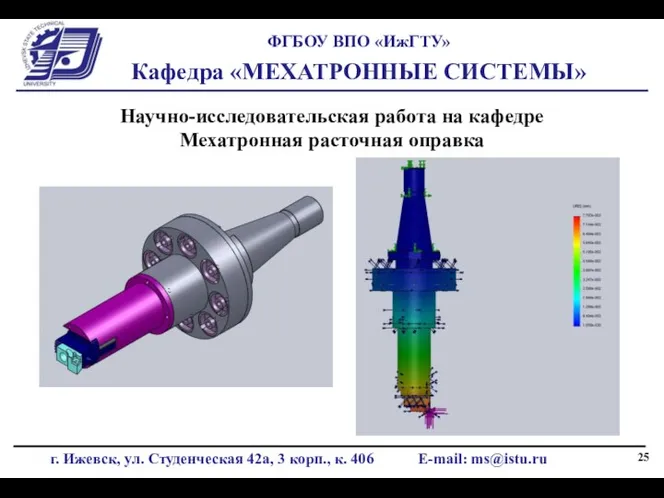
- 25. Научно-исследовательская работа на кафедре Мехатронная расточная оправка
- 26. Внеучебная работа Турслет ИжГТУ Вечер факультета
- 28. Скачать презентацию
Подготовка специалистов по направлениям:
Бакалавриат:
150306 «Мехатроника и робототехника» 4 года
Магистратура:
150406 «Мехатроника
Подготовка специалистов по направлениям:
Бакалавриат:
150306 «Мехатроника и робототехника» 4 года
Магистратура:
150406 «Мехатроника
Миссия кафедры
Подготовка специалистов в условиях интеграции новых отраслей знаний (информационных технологий,
Миссия кафедры
Подготовка специалистов в условиях интеграции новых отраслей знаний (информационных технологий,

Лаборатории кафедры:
Компьютерный класс информатики и САПР (ауд. 3-410)
Лицензионное ПО: MSDNAA
Лаборатории кафедры:
Компьютерный класс информатики и САПР (ауд. 3-410)
Лицензионное ПО: MSDNAA

4-х координатный обрабатывающий центр с ЧПУ ВМ-501
токарный станок повышенной точности
4-х координатный обрабатывающий центр с ЧПУ ВМ-501
токарный станок повышенной точности

Лаборатория электроники и микропроцессорной техники (ауд. 3-5а)
Рабочие места монтажника электронных устройств–
Лаборатория электроники и микропроцессорной техники (ауд. 3-5а)
Рабочие места монтажника электронных устройств–
Основные специальные дисциплины
Теория и технология программирования
ЭВМ и вычислительные сети
Методы искусственного интеллекта
Основные специальные дисциплины
Теория и технология программирования
ЭВМ и вычислительные сети
Методы искусственного интеллекта

Сотрудничество с предприятиями и трудоустройство выпускников
Сотрудничество с предприятиями и трудоустройство выпускников
Международная аккредитация образовательных программ
Европейское приложение к диплому ИжГТУ (Diploma Supplement)
Документ дает
Международная аккредитация образовательных программ
Европейское приложение к диплому ИжГТУ (Diploma Supplement)
Документ дает
Международное сотрудничество
Технические университеты г. Братислава, Зволен, Трнава (Словакия):
- участие в конференциях;
-
Международное сотрудничество
Технические университеты г. Братислава, Зволен, Трнава (Словакия):
- участие в конференциях;
-

Международное сотрудничество
Участие в зарубежных научно-исследовательских проектах, Лейфана университет, г. Люнебург, Германия
Научная
Международное сотрудничество
Участие в зарубежных научно-исследовательских проектах, Лейфана университет, г. Люнебург, Германия
Научная

Международное сотрудничество
Студенты на летней практике в лабораториях факультета Электротехники и информатики
Международное сотрудничество
Студенты на летней практике в лабораториях факультета Электротехники и информатики
Международное сотрудничество
Студенты на летней практике в лаборатории фирмы Siemens в Университете
Международное сотрудничество
Студенты на летней практике в лаборатории фирмы Siemens в Университете

Научно-исследовательская работа студентов
Призеры международной выставки «РОБОТЕХНИКА 2007», г.Москва, ВВЦ (ВДНХ)
Председатель правительства
Научно-исследовательская работа студентов
Призеры международной выставки «РОБОТЕХНИКА 2007», г.Москва, ВВЦ (ВДНХ)
Председатель правительства

Научно-исследовательская работа студентов
Участники международного фестиваля им. Проф. Девянина «Мобильные роботы 2008»,
Научно-исследовательская работа студентов
Участники международного фестиваля им. Проф. Девянина «Мобильные роботы 2008»,
Научно-исследовательская работа студентов
Сертификаты по программированию С++, Assembler
Участие во всероссийском
Научно-исследовательская работа студентов
Сертификаты по программированию С++, Assembler
Участие во всероссийском

Научно-исследовательская работа студентов
В настоящее время студенты работают по следующим направлениям:
Разработка модели
Научно-исследовательская работа студентов
В настоящее время студенты работают по следующим направлениям:
Разработка модели
Научно-исследовательская работа на кафедре
Вал расправляющий
Научно-исследовательская работа на кафедре
Вал расправляющий

Научно-исследовательская работа на кафедре
Вал расправляющий
- Балка несущая в сборе с
Научно-исследовательская работа на кафедре
Вал расправляющий
- Балка несущая в сборе с

Научно-исследовательская работа на кафедре
Алгоритмы распознавания и управления
Выделение особенностей изображения с
Научно-исследовательская работа на кафедре
Алгоритмы распознавания и управления
Выделение особенностей изображения с
Научно-исследовательская работа на кафедре
Исследование процессов сверления и растачивания
Схема измерительного стенда
Научно-исследовательская работа на кафедре
Исследование процессов сверления и растачивания
Схема измерительного стенда

Научно-исследовательская работа на кафедре
Исследование процессов сверления и растачивания
Стенд для измерения
Научно-исследовательская работа на кафедре
Исследование процессов сверления и растачивания
Стенд для измерения
Научно-исследовательская работа на кафедре
Исследование процессов сверления и растачивания
Программа для визуализации
Научно-исследовательская работа на кафедре
Исследование процессов сверления и растачивания
Программа для визуализации
Научно-исследовательская работа на кафедре
Мехатронная расточная оправка
Основной вид
Вид А
Вид снизу
Вид сверху
Научно-исследовательская работа на кафедре
Мехатронная расточная оправка
Основной вид
Вид А
Вид снизу
Вид сверху
Научно-исследовательская работа на кафедре
Мехатронная расточная оправка
Научно-исследовательская работа на кафедре
Мехатронная расточная оправка

Внеучебная работа
Турслет ИжГТУ
Вечер факультета
Внеучебная работа
Турслет ИжГТУ
Вечер факультета
 Индивидуальный проект на тему: «Продвижение ВФСК ГТО среди сверстников»
Индивидуальный проект на тему: «Продвижение ВФСК ГТО среди сверстников» Створення креслень в КОМПАС-3D V14/16
Створення креслень в КОМПАС-3D V14/16 Расчет характеристик двигателей приводов
Расчет характеристик двигателей приводов Ударные народные инструменты
Ударные народные инструменты Стоматологическая одежда
Стоматологическая одежда Koruma Sorumluluğu Doktrini ve Değişen Egemenlik Anlayışı
Koruma Sorumluluğu Doktrini ve Değişen Egemenlik Anlayışı Соединения деталей машин. Неразъемные соединения. Характеристика и расчеты сварных и паяных соединений. Заклепочные соединения
Соединения деталей машин. Неразъемные соединения. Характеристика и расчеты сварных и паяных соединений. Заклепочные соединения Политическая система общества
Политическая система общества Степенная функция - презентация по Алгебре_
Степенная функция - презентация по Алгебре_ Процесс управления и управленческие решения
Процесс управления и управленческие решения Россия в 1917-1921 гг.: революция и гражданская война
Россия в 1917-1921 гг.: революция и гражданская война  Презентация Федеральный закон от 24.07.1998 № 125-ФЗ (ред. от 29.12.2015) «Об обязательном социальном страховании от несчастных случаев на про
Презентация Федеральный закон от 24.07.1998 № 125-ФЗ (ред. от 29.12.2015) «Об обязательном социальном страховании от несчастных случаев на про Тенденции ценообразования
Тенденции ценообразования  Программирование на языке MATLAB. Программирование разветвляющих алгоритмов
Программирование на языке MATLAB. Программирование разветвляющих алгоритмов Класифікація держав за їхньою формою
Класифікація держав за їхньою формою «Наука побеждать» Автор: Кругляков Александр 3 класс
«Наука побеждать» Автор: Кругляков Александр 3 класс Язык программирования JAVA. 1 занятие Hello!
Язык программирования JAVA. 1 занятие Hello! Презентация по алгебре Определение степени с натуральным показателем 7 класс
Презентация по алгебре Определение степени с натуральным показателем 7 класс 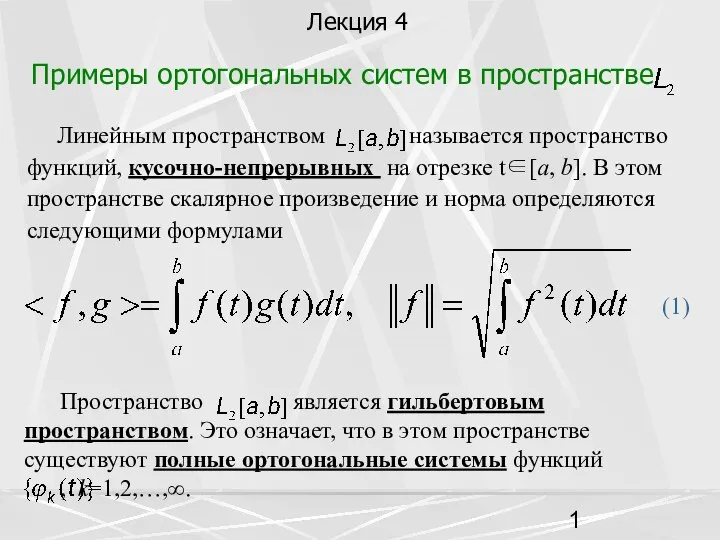 Примеры ортогональных систем в пространстве
Примеры ортогональных систем в пространстве  Функции
Функции  Борис Николаевич Ельцин
Борис Николаевич Ельцин Деловая игра «Избирательный круг»
Деловая игра «Избирательный круг» Гибкость и методика ее развития
Гибкость и методика ее развития Презентация "Экономические достижения Ростовской области" - скачать презентации по Экономике
Презентация "Экономические достижения Ростовской области" - скачать презентации по Экономике Олигополия
Олигополия Алхимия
Алхимия Пространственная организация территории. Тема 3
Пространственная организация территории. Тема 3 Kompyuterning yordamchi qurilmalari
Kompyuterning yordamchi qurilmalari