- Динамика точки

Содержание
- 2. Литература Учебники 1. Тарг С.М. Краткий курс теоретической механики. 2. Яблонский А.А. Курс теоретической механики. Часть
- 3. 1. ВВЕДЕНИЕ В ДИНАМИКУ. ЗАКОНЫ ДИНАМИКИ ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ Кинематика – учение о движении инертность
- 4. Инертность тела Мера инертности. Количественной мерой инертности материального тела является физическая величина, называемая массой тела. Свойства
- 5. Материальная точка Опр. Материальная точка – это точка, обладающая массой. Условие принятия материального тела в качестве
- 6. ДИНАМИКА ТОЧКИ ЗАКОНЫ ДИНАМИКИ Первый закон (закон инерции) Изолированная от внешних воздействий материальная точка сохраняет свое
- 7. При действии n сил, с учетом того, что Математически закон выражается равенством Второй закон (основной закон
- 8. Две материальные точки действуют друг на друга с силами, равными по модулю и направленными вдоль прямой,
- 9. Задачи динамики точки Для свободной материальной точки. 1 задача. Зная закон движения точки, определить действующую на
- 10. Системы единиц В механике возможно введение двух принципиально отличных друг от друга систем единиц. Системы типа
- 11. Основные виды сил Другие силы: сила тяготения, сила аэродинамического сопротивления и т.д. Сила тяжести Р =
- 12. Решение задачи динамики точки 1 задача Дано: х = f1(t), у = f2(t), z = f3(t)
- 13. 2. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ. РЕШЕНИЕ ЗАДАЧ ДИНАМИКИ ТОЧКИ. 2.1.Уравнения в декартовых координатах Второй закон динамики
- 14. 2.2. Уравнения в проекциях на оси естественного трехгранника. Оси естественного трехгранника М τn b : М
- 15. 2.3. Решение первой задачи динамики точки. Пусть задано ускорение точки Действующая сила находятся из уравнения. Реакция
- 16. 2.4. Пример решение первой задачи динамики точки. Задача. Лифт весом Р начинает подниматься с ускорением а.
- 17. 2.5. Решение второй (основной) задачи динамики точки. А) Решение второй задачи при прямолинейном движении точки Дифуравнение
- 18. В) Пример и алгоритм решения основной задачи динамики при прямолинейном движении точки. Задача. Груз весом Р
- 19. 6. Спроектируем векторное равенство на координатную ось Ох 5. Запишем основное уравнение динамики применительно к данной
- 21. Скачать презентацию
Литература
Учебники
1. Тарг С.М. Краткий курс теоретической механики.
2. Яблонский А.А.
Литература
Учебники
1. Тарг С.М. Краткий курс теоретической механики.
2. Яблонский А.А.
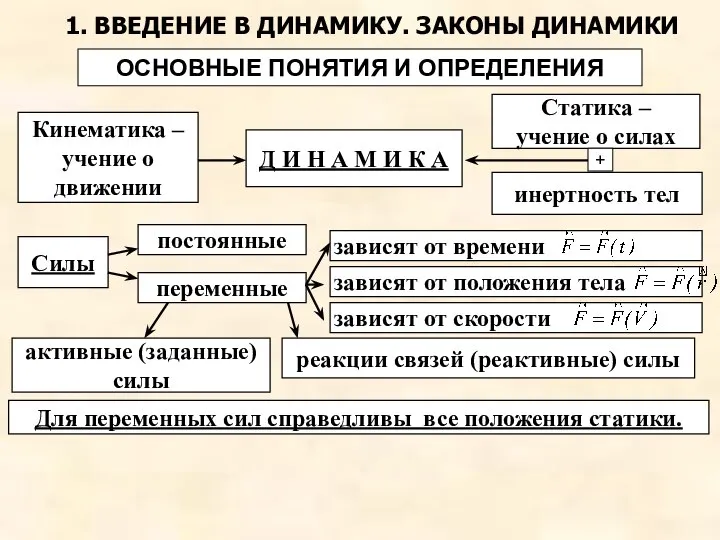
1. ВВЕДЕНИЕ В ДИНАМИКУ. ЗАКОНЫ ДИНАМИКИ
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Кинематика –
1. ВВЕДЕНИЕ В ДИНАМИКУ. ЗАКОНЫ ДИНАМИКИ
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Кинематика –
Инертность тела
Мера инертности. Количественной мерой инертности материального тела является физическая величина,
Инертность тела
Мера инертности. Количественной мерой инертности материального тела является физическая величина,
Материальная точка
Опр. Материальная точка – это точка, обладающая массой.
Условие принятия
Материальная точка
Опр. Материальная точка – это точка, обладающая массой.
Условие принятия
ДИНАМИКА ТОЧКИ
ЗАКОНЫ ДИНАМИКИ
Первый закон (закон инерции)
Изолированная от внешних воздействий
ДИНАМИКА ТОЧКИ
ЗАКОНЫ ДИНАМИКИ
Первый закон (закон инерции)
Изолированная от внешних воздействий
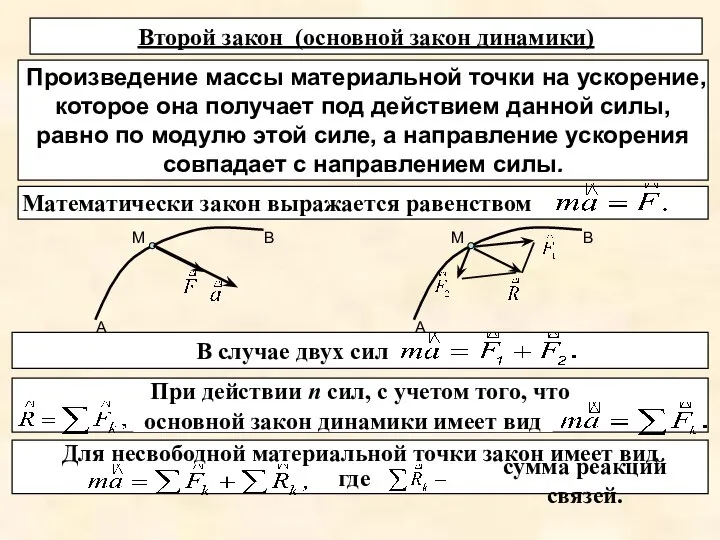
При действии n сил, с учетом того, что
Математически закон выражается
При действии n сил, с учетом того, что
Математически закон выражается
Две материальные точки действуют друг на друга с силами, равными по
Две материальные точки действуют друг на друга с силами, равными по
Задачи динамики точки
Для свободной материальной точки.
1 задача. Зная закон движения точки,
Задачи динамики точки
Для свободной материальной точки.
1 задача. Зная закон движения точки,
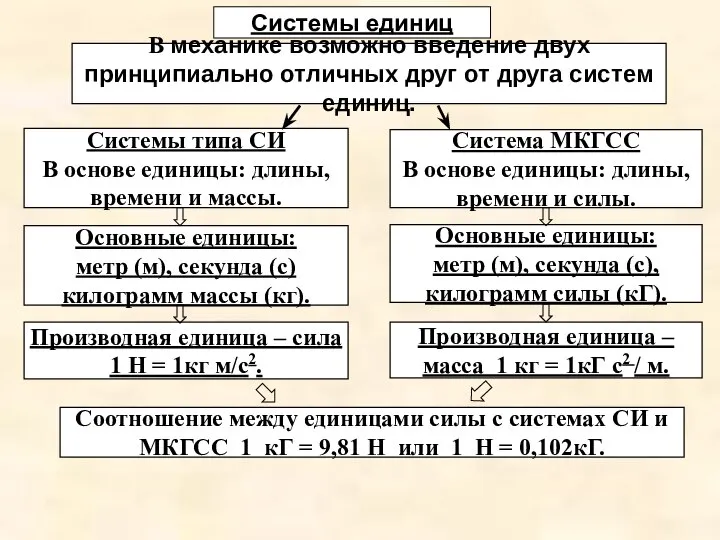
Системы единиц
В механике возможно введение двух принципиально отличных друг от
Системы единиц
В механике возможно введение двух принципиально отличных друг от
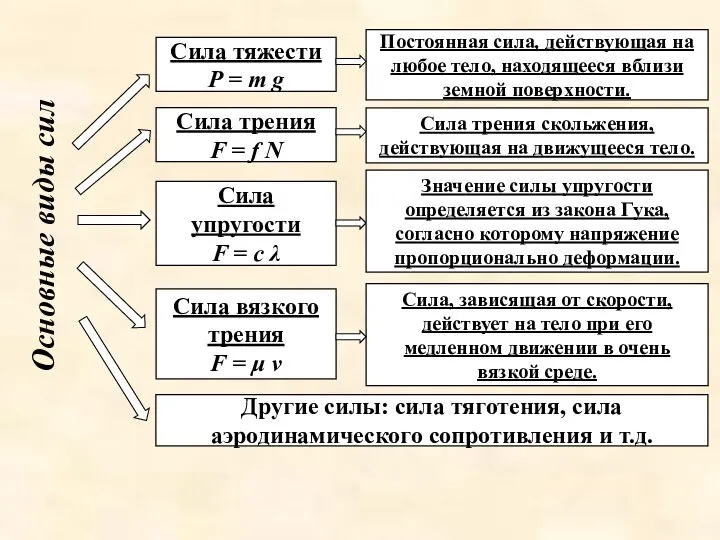
Основные виды сил
Другие силы: сила тяготения, сила аэродинамического сопротивления и
Основные виды сил
Другие силы: сила тяготения, сила аэродинамического сопротивления и
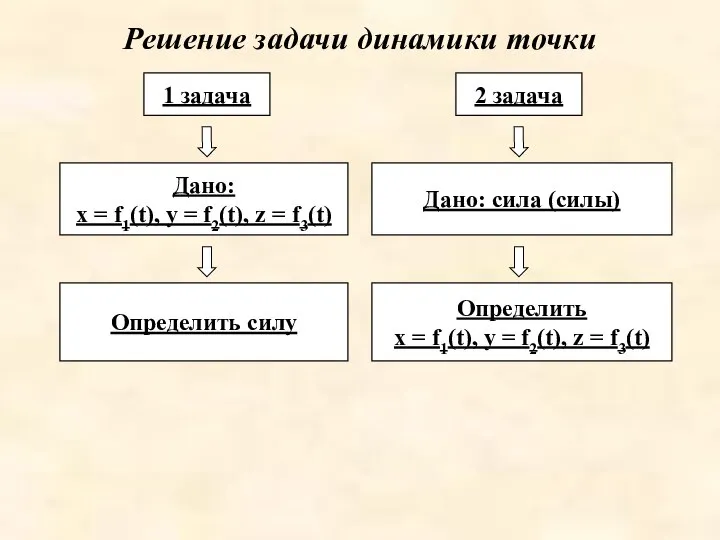
Решение задачи динамики точки
1 задача
Дано:
х = f1(t), у = f2(t),
Решение задачи динамики точки
1 задача
Дано:
х = f1(t), у = f2(t),
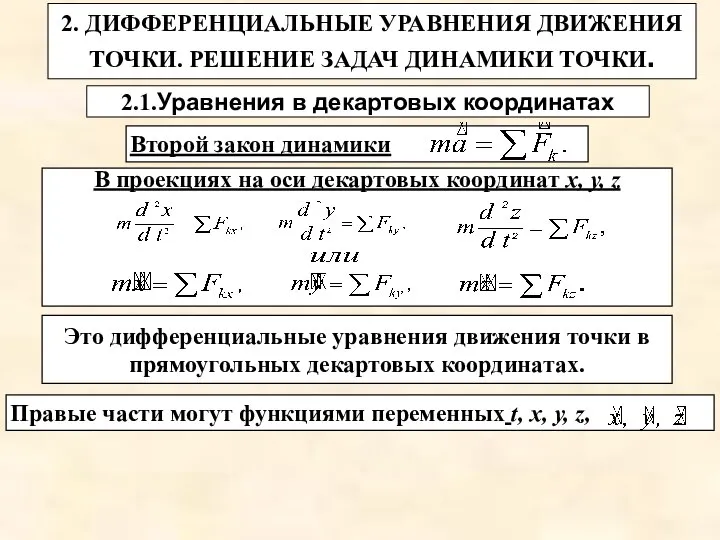
2. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ. РЕШЕНИЕ ЗАДАЧ ДИНАМИКИ ТОЧКИ.
2.1.Уравнения в
2. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ. РЕШЕНИЕ ЗАДАЧ ДИНАМИКИ ТОЧКИ.
2.1.Уравнения в
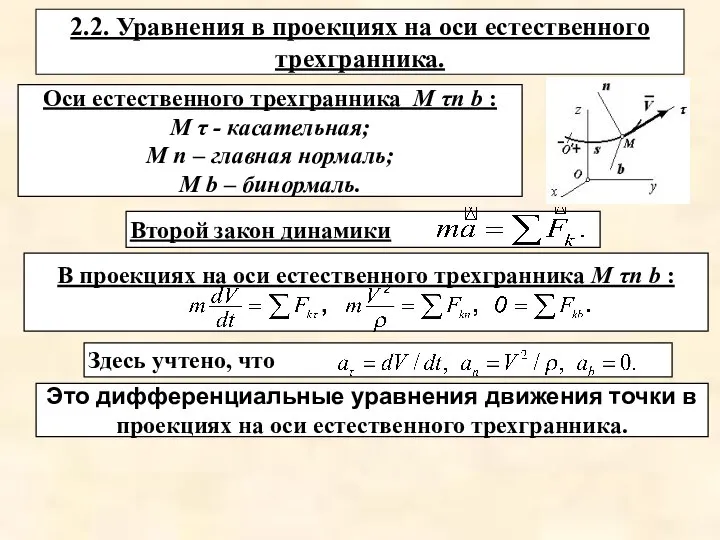
2.2. Уравнения в проекциях на оси естественного трехгранника.
Оси естественного трехгранника
2.2. Уравнения в проекциях на оси естественного трехгранника.
Оси естественного трехгранника
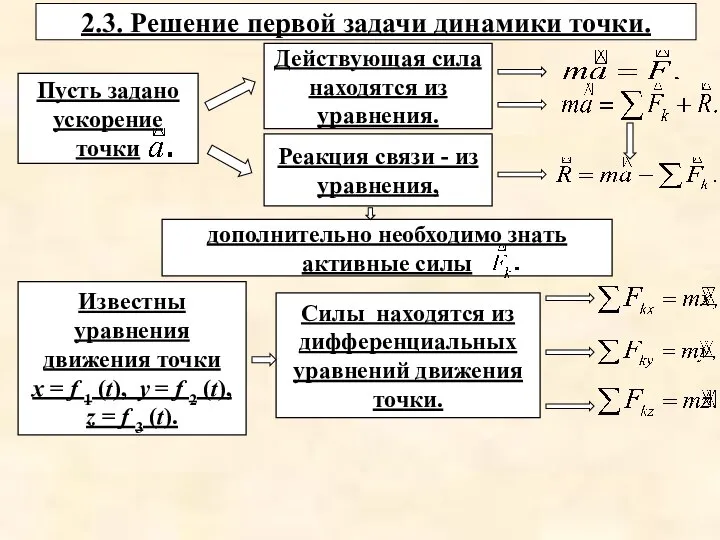
2.3. Решение первой задачи динамики точки.
Пусть задано ускорение точки
Действующая
2.3. Решение первой задачи динамики точки.
Пусть задано ускорение точки
Действующая
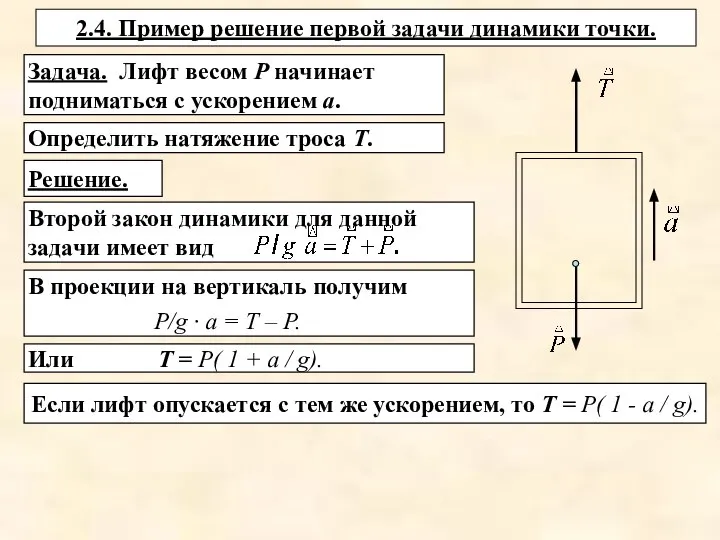
2.4. Пример решение первой задачи динамики точки.
Задача. Лифт весом Р
2.4. Пример решение первой задачи динамики точки.
Задача. Лифт весом Р
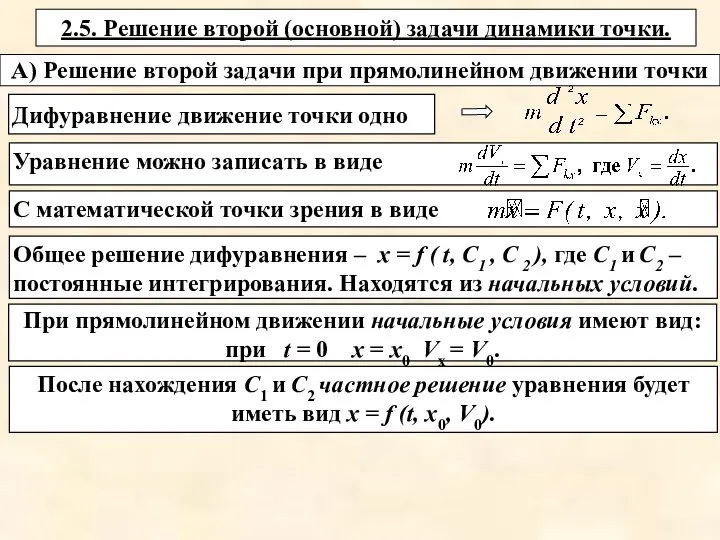
2.5. Решение второй (основной) задачи динамики точки.
А) Решение второй задачи
2.5. Решение второй (основной) задачи динамики точки.
А) Решение второй задачи
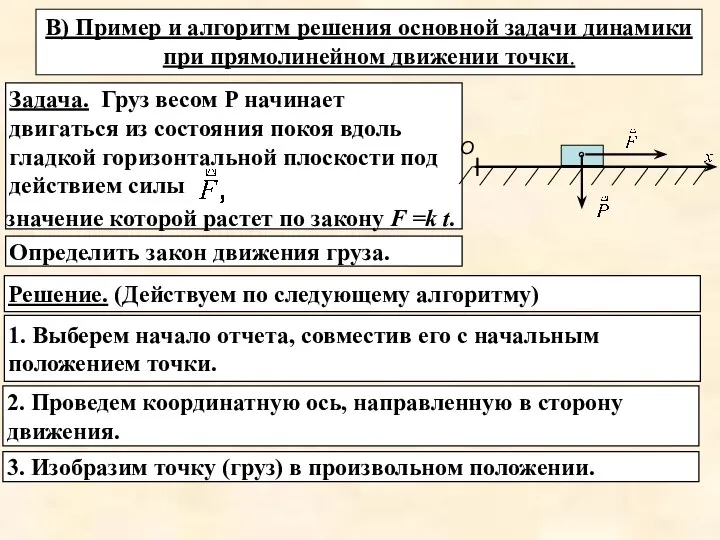
В) Пример и алгоритм решения основной задачи динамики при прямолинейном движении
В) Пример и алгоритм решения основной задачи динамики при прямолинейном движении
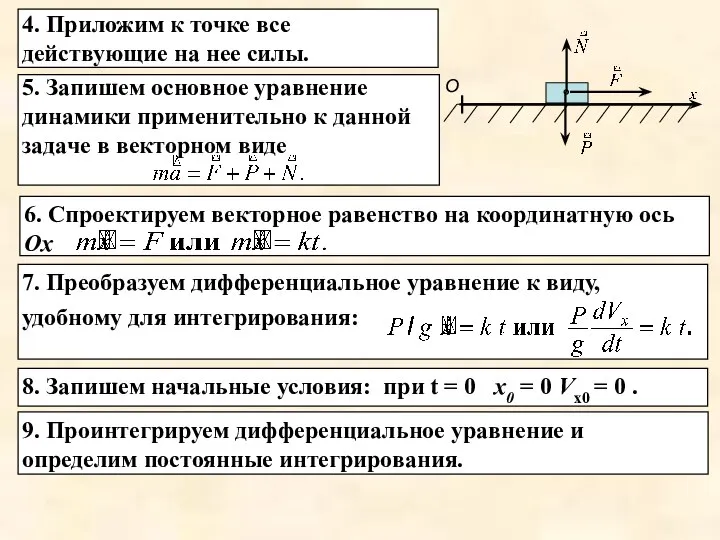
6. Спроектируем векторное равенство на координатную ось Ох
5. Запишем основное
6. Спроектируем векторное равенство на координатную ось Ох
5. Запишем основное
 Сибирское таможенное управление
Сибирское таможенное управление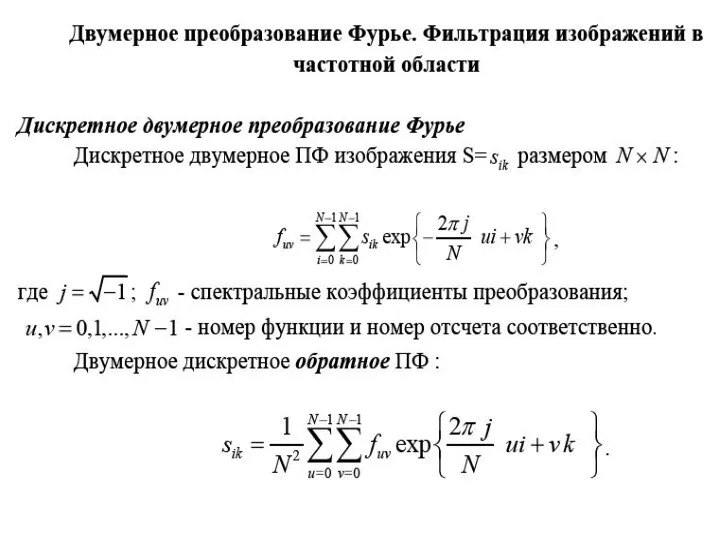 Фурье
Фурье Туркеста́но-Сиби́рская магистра́ль
Туркеста́но-Сиби́рская магистра́ль Достопримечательности Лондона
Достопримечательности Лондона Perfekt
Perfekt Нравственно-патриотическое воспитание дошкольников через ознакомление с традициями и культурой своего народа
Нравственно-патриотическое воспитание дошкольников через ознакомление с традициями и культурой своего народа РЕЗЕРВНЫЙ ФОНД,ЕГО ЗНАЧЕНИЕ ДЛЯ РОССИЙСКОЙ ЭКОНОМИКИ ВЫПОЛНИЛА СТУДЕНТКА 4 КУРСА ГРУППЫ Т-081 УЛАН КЫЗЫ АЙГЕРИМ
РЕЗЕРВНЫЙ ФОНД,ЕГО ЗНАЧЕНИЕ ДЛЯ РОССИЙСКОЙ ЭКОНОМИКИ ВЫПОЛНИЛА СТУДЕНТКА 4 КУРСА ГРУППЫ Т-081 УЛАН КЫЗЫ АЙГЕРИМ Особенности выполнения программ AVR-МК
Особенности выполнения программ AVR-МК Презентация Разделение властей и система противовесов в Афинах
Презентация Разделение властей и система противовесов в Афинах  Изображение весны в творчестве русских живописцев
Изображение весны в творчестве русских живописцев Православный праздник пасхи
Православный праздник пасхи Бұл қазақ халқының ең бірінші панасы
Бұл қазақ халқының ең бірінші панасы Моє хобі - футбол
Моє хобі - футбол Грузовая авианакладная
Грузовая авианакладная Плиты с деревянным каркасом. Конструирование и расчет. Пластмассовые плиты
Плиты с деревянным каркасом. Конструирование и расчет. Пластмассовые плиты Презентация на тему Можно ли жить и не дышать?
Презентация на тему Можно ли жить и не дышать? Школа футбольного арбитра. Правило 9. Мяч в игре и не в игре
Школа футбольного арбитра. Правило 9. Мяч в игре и не в игре Презентация Металлоизделия
Презентация Металлоизделия Онкология Лекция для студентов III курса врачебных факультетов Профессор В.И.Тихонов
Онкология Лекция для студентов III курса врачебных факультетов Профессор В.И.Тихонов  SLF4J project
SLF4J project  Русская прялка
Русская прялка Граждане как субъекты административного права
Граждане как субъекты административного права Датчики. Лямбда-зонд, датчики частоты вращения коленвала и распредвал
Датчики. Лямбда-зонд, датчики частоты вращения коленвала и распредвал Крещение Господне
Крещение Господне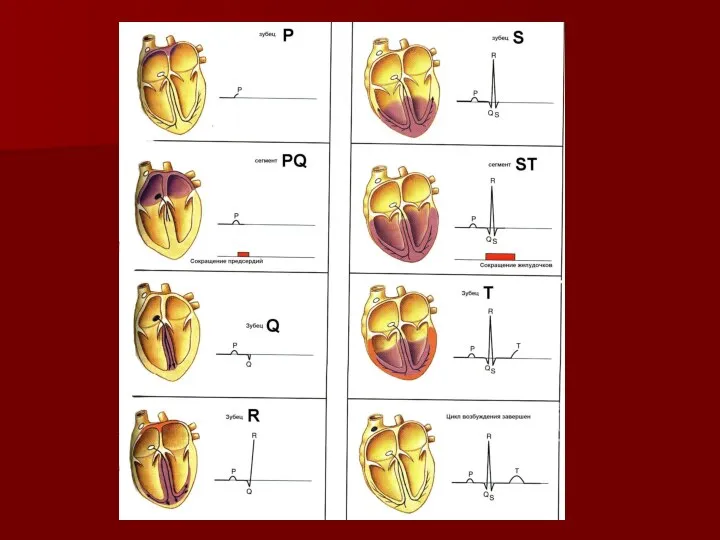 ЭКГ у детей
ЭКГ у детей История медицины в Китае и Тибете
История медицины в Китае и Тибете  Министерство Юстиции РФ
Министерство Юстиции РФ  Киберпреступность
Киберпреступность